


Σε αυτό το άρθρο, ο Οδηγός θα μας πει πώς έκανε ένα ρομποτικό μπάρμαν που ελέγχεται από ένα smartphone.
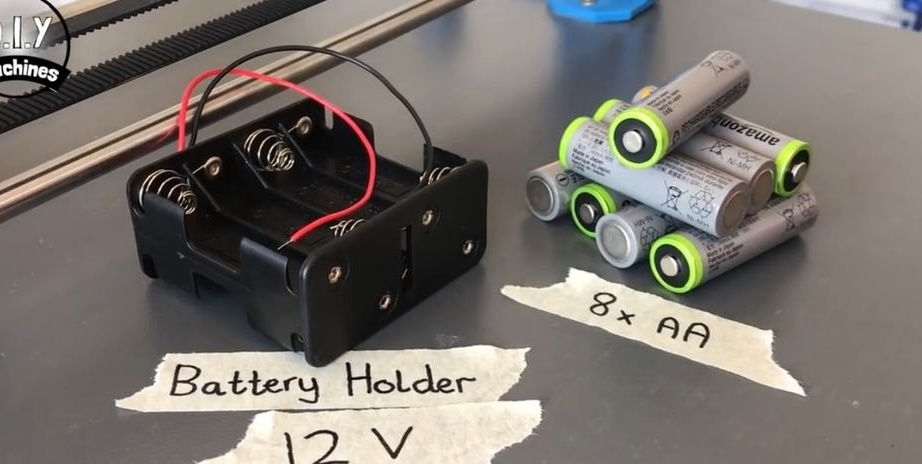
Χαρακτηριστικά της συσκευής: εργασία σε Arduino, προσιτή τιμή, έλεγχος bluetooth από οποιοδήποτε gadget, αυτονομία (εργασία από 8 μπαταρίες AA).
Για να δημιουργήσει μια τέτοια συσκευή, ο πλοίαρχος χρησιμοποίησε τα εξής
Υλικά και εργαλεία:
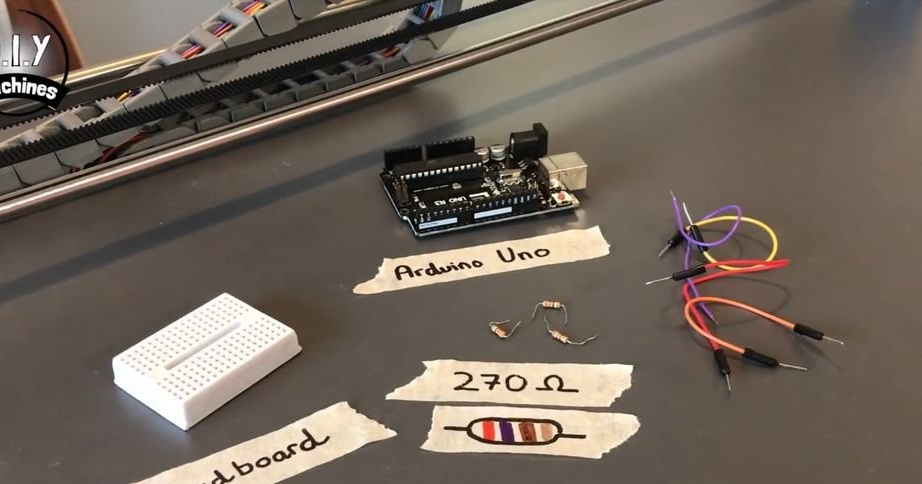
-Arduino Uno;
-Μνήμη οδήγησης L293D.
- διακόπτης επαφής.
-Λευτικά ρουλεμάν.
-Μετακίνηση κινητήρα.
-Μη και τροχαλία (έκδοση 2m).
-Μη και τροχαλία (έκδοση 5m).
-HM10 Μονάδα Bluetooth.
-Ένα κατσαβίδι.
-Συνδέσεις.
-Πολλά;
-Το πάνω μέρος του τραπεζιού.
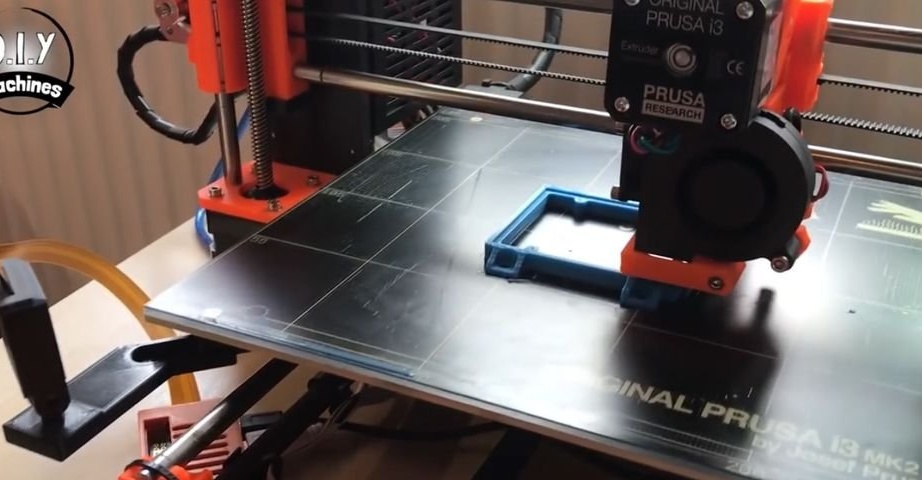
-3D εκτυπωτή.
-Μεταλλικές ράβδοι.
- κατσαβίδι ·
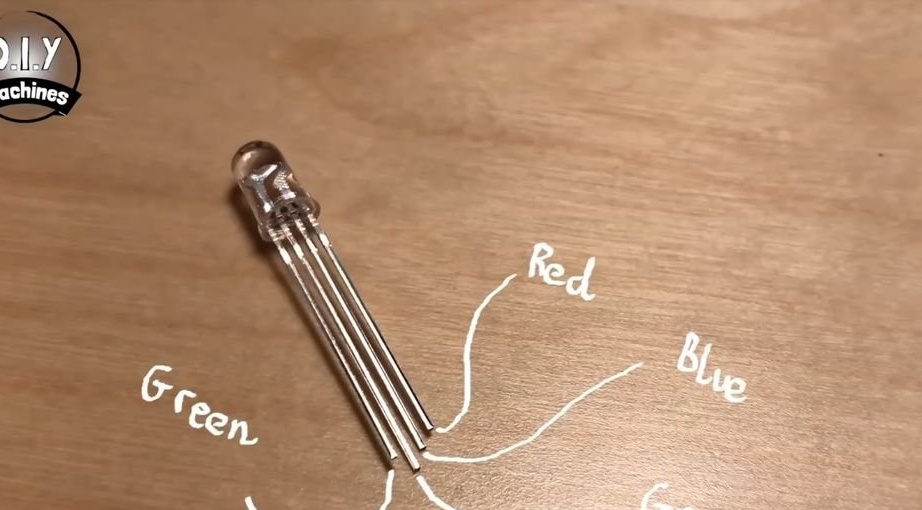
- LED RGB.
-Wire;
-Αξαρτήματα αξεσουάρ
-Izolenta;
-Περιέρα κόλλας.
-Το διαμέρισμα του μπαμπού.
- Συνδέσεις.
-Batteries;
- Υπολογιστή με λογισμικό.
- Κάτοχοι φιάλων.
Βαλβίδα
-Μπουγάκια.
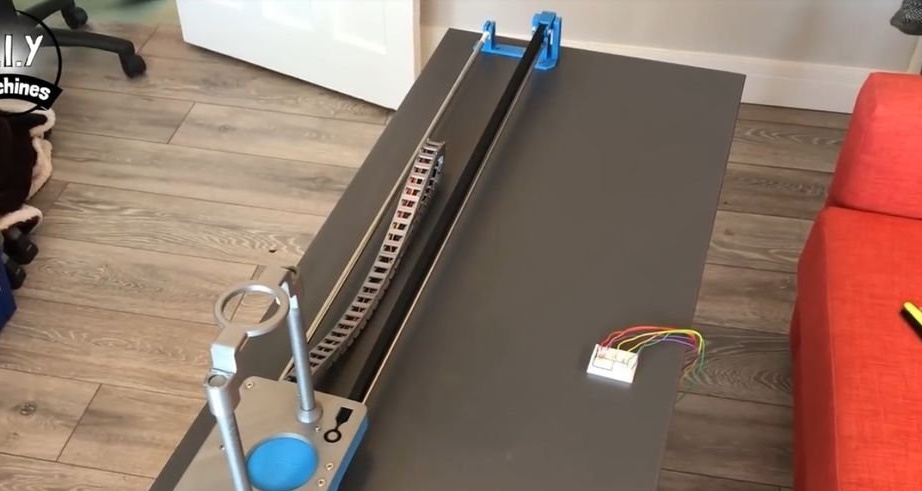
Βήμα πρώτο: Ο πίνακας
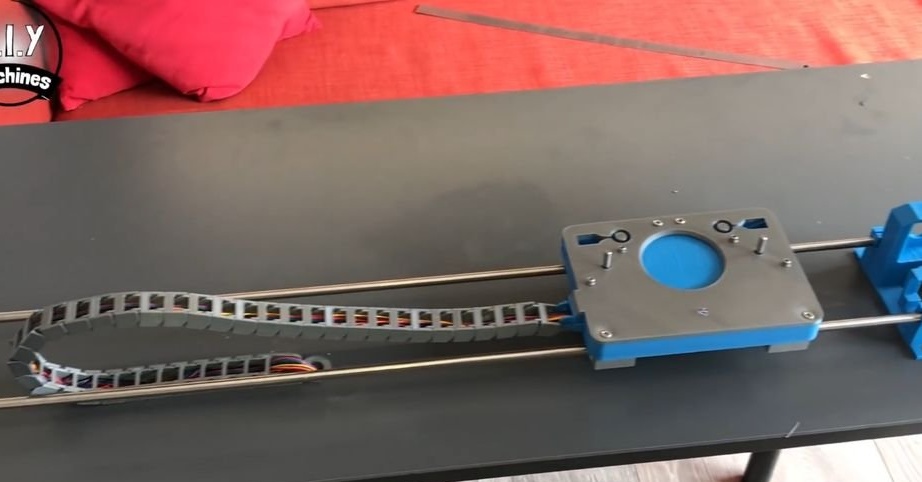
Πρώτον, ο πλοίαρχος συλλέγει τον πίνακα. Μέγεθος πίνακα 120 * 45 cm. Πάχος πίνακα 18 mm.


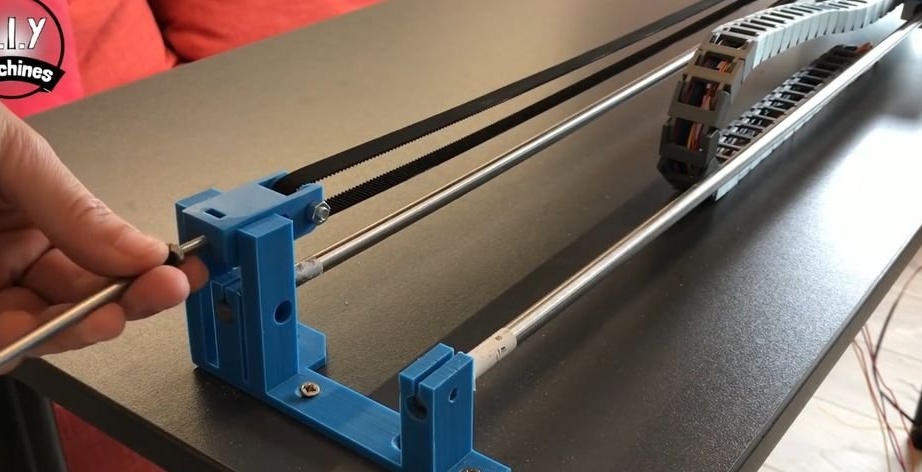
Βήμα δεύτερο: Τεντωτήρας
Μπορείτε να κατεβάσετε αρχεία για εκτύπωση μερών παρακάτω.
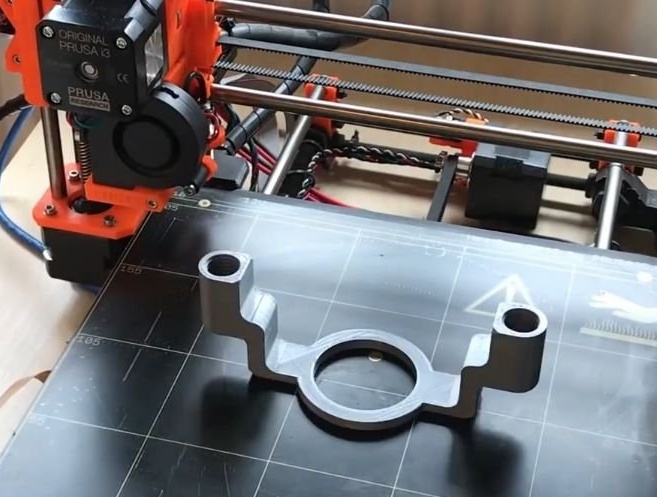
Αρχεία εκτύπωσης 3D.
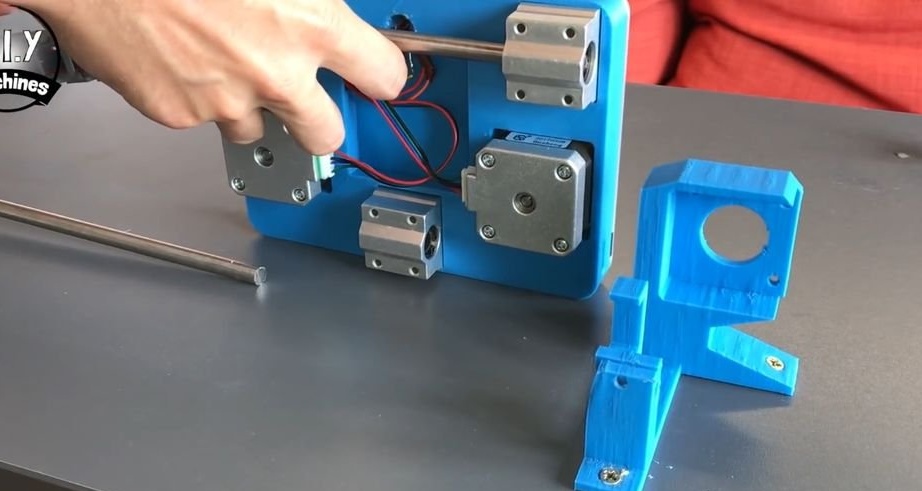
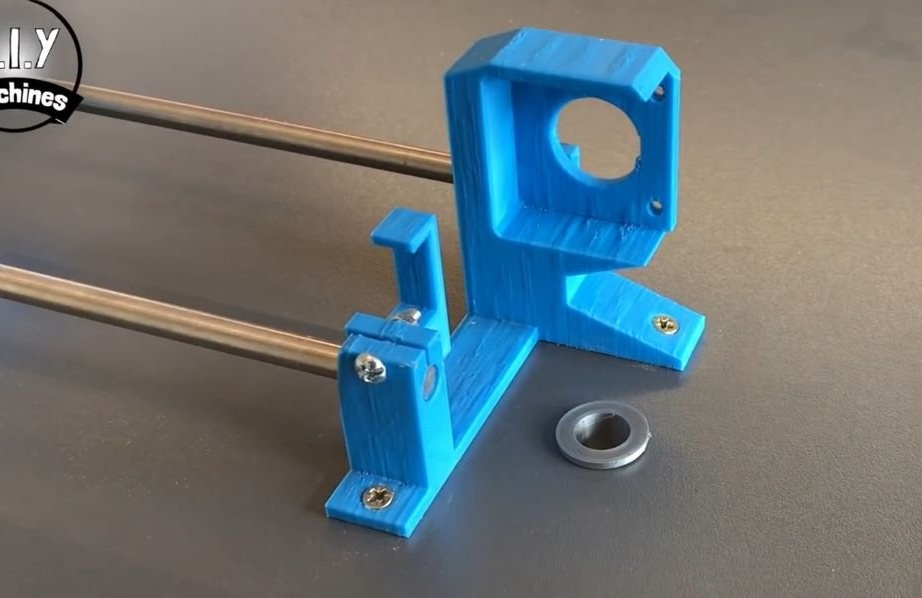
Τώρα θα χρειαστεί να εκτυπώσετε τις δύο πρώτες λεπτομέρειες "idler.stl" και "Rod_Clamp_V5.stl".
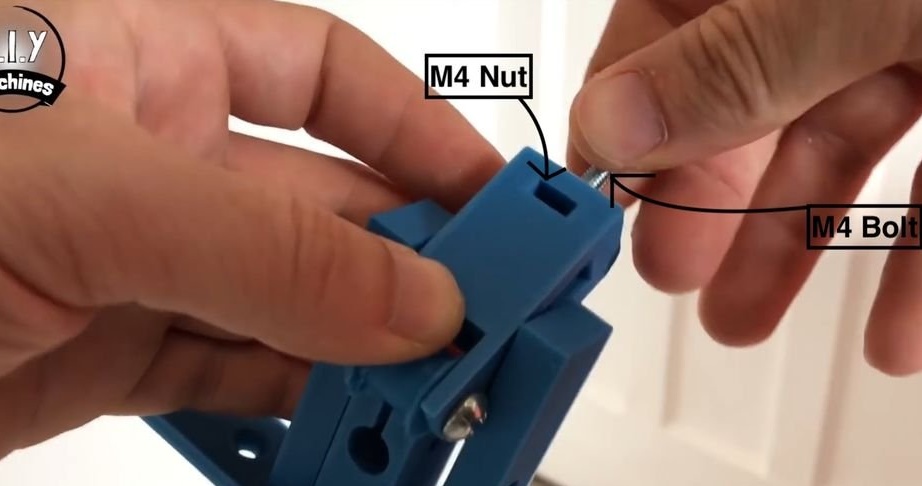
Μετά την εκτύπωση, είναι απαραίτητο να τοποθετήσετε τον κύλινδρο τάνυσης στον σφιγκτήρα στελέχους χρησιμοποιώντας ένα μακρύ μπουλόνι και παξιμάδι Μ4. Η ισχυρή σύσφιξη δεν είναι απαραίτητη, καθώς ο κύλινδρος πρέπει να περιστρέφεται ελεύθερα.
Στη συνέχεια τα δύο μέρη συνδέονται μεταξύ τους.
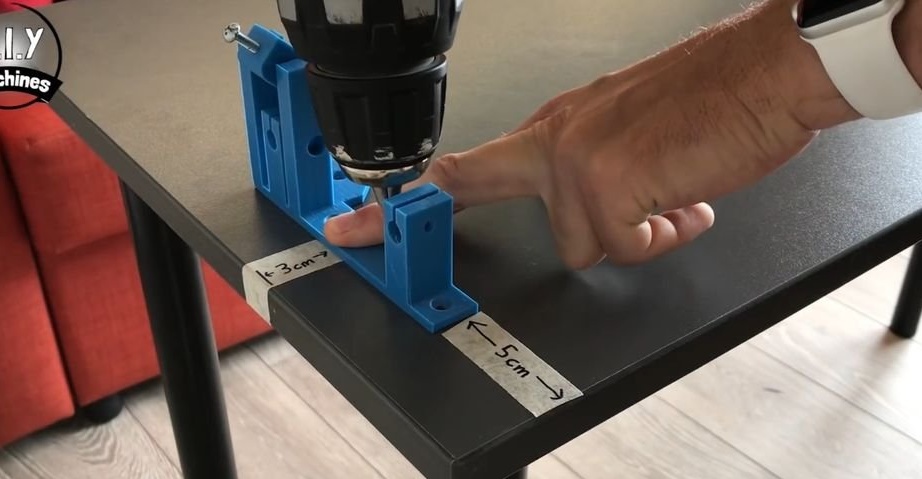
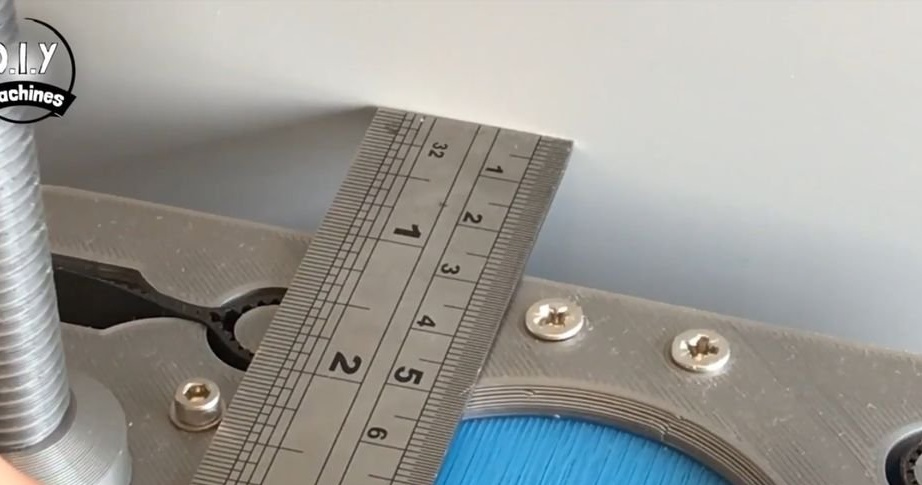
Σηματοδοτεί σε τραπέζι 3 cm από το αριστερό κοντό άκρο και 5 cm από την μπροστινή άκρη και σφίγγει τον εντατήρα.

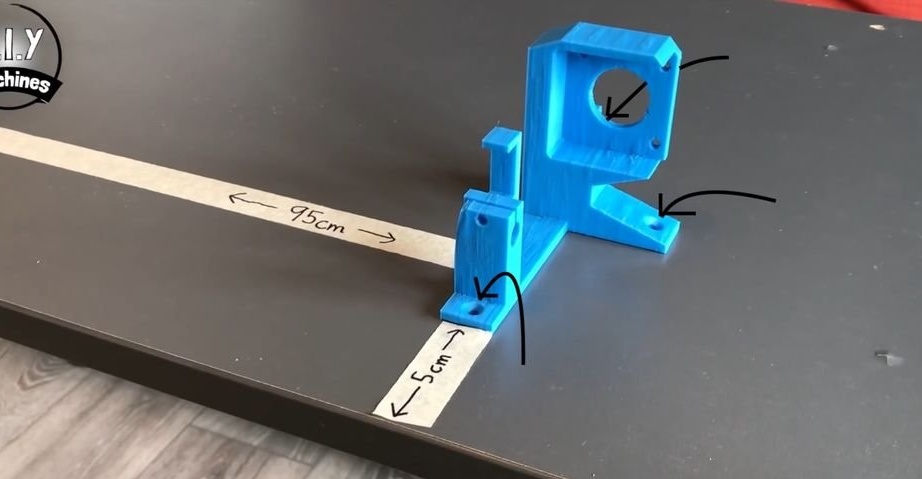
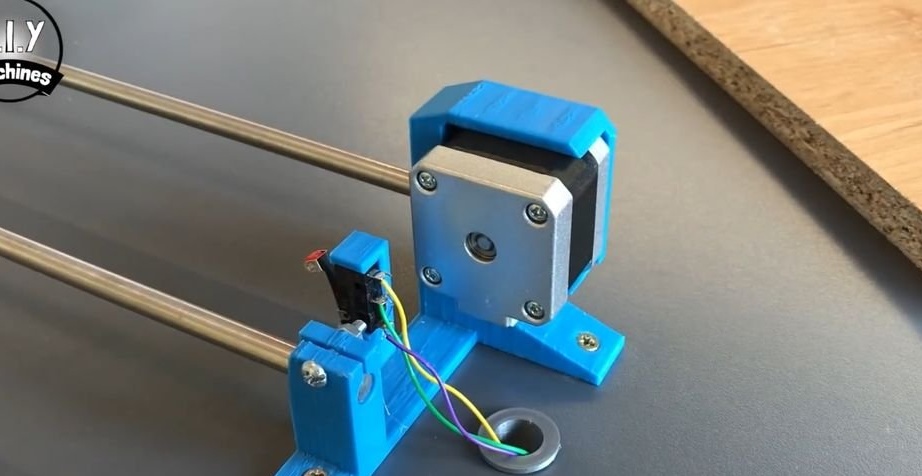
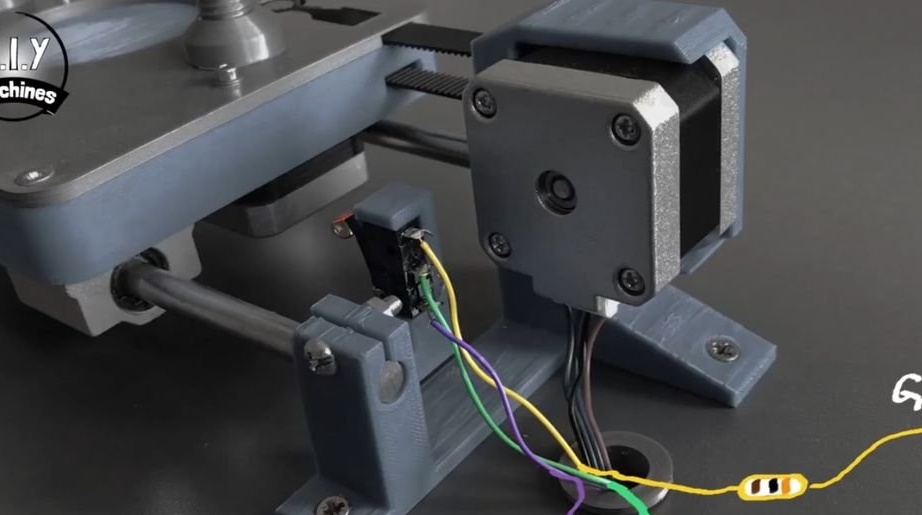
Βήμα δεύτερο: Τοποθέτηση κινητήρα
Εκτυπώνει τη βάση του κινητήρα, αρχείο "X_Axis_Motor_Mount.stl". Στερεώνει στην επιφάνεια του τραπεζιού σε απόσταση 95 cm από τον εντατήρα και 5 cm από την άκρη του τραπεζιού.
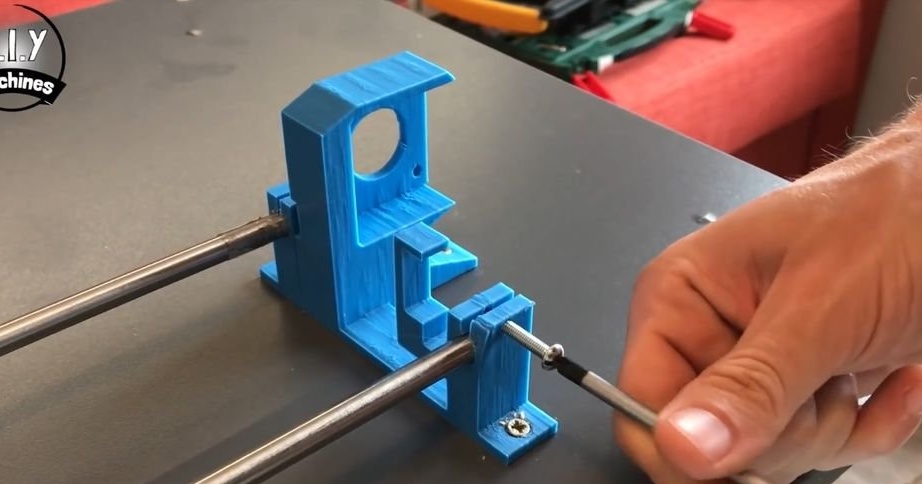
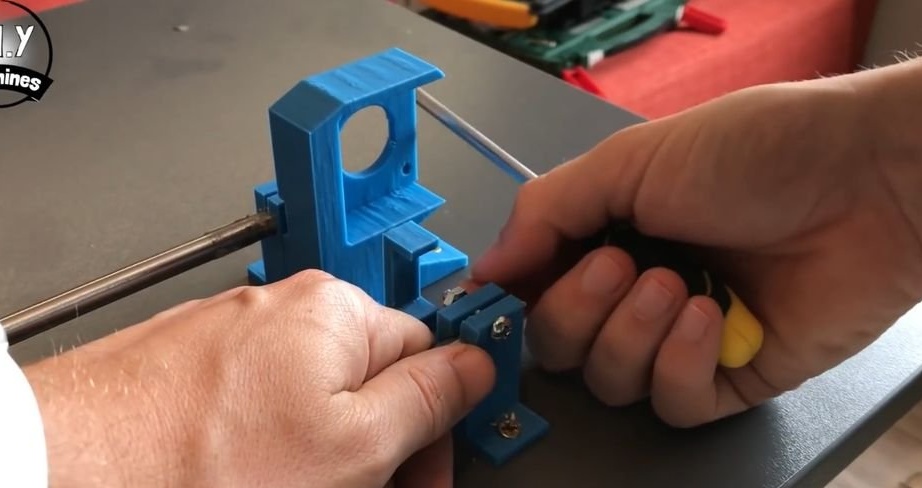
Βήμα τρίτο: Οδηγοί
Ορίζει οδηγούς. Το μήκος των ράβδων είναι 1 μέτρο.
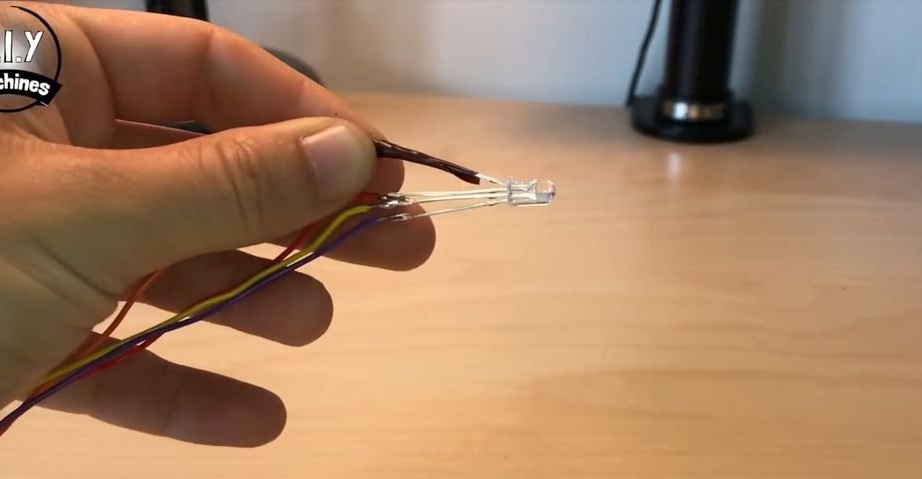
Βήμα τέσσερα: LED
Ο πλοίαρχος θα χρησιμοποιήσει το LED RGB για ένδειξη. Συνδέστε σύρματα των 180 cm διαφορετικών χρωμάτων σε κάθε πόδι. Οι απομονώσεις διασταυρώσεων.




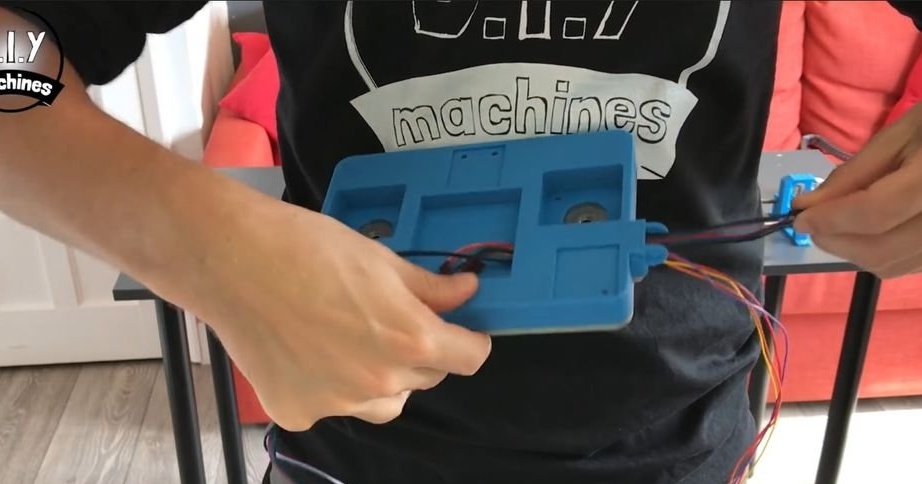
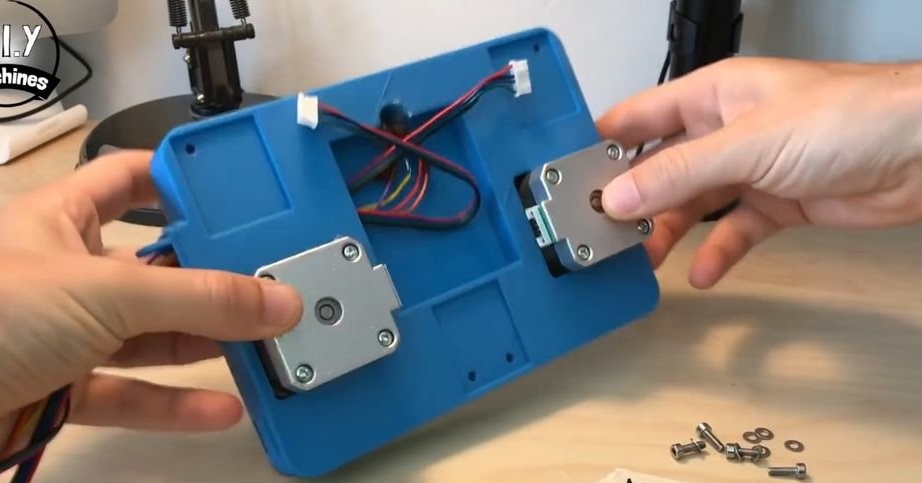
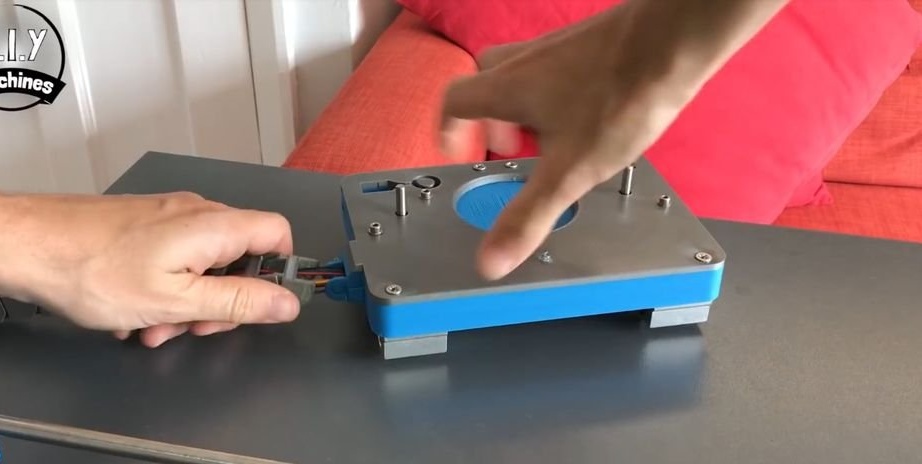
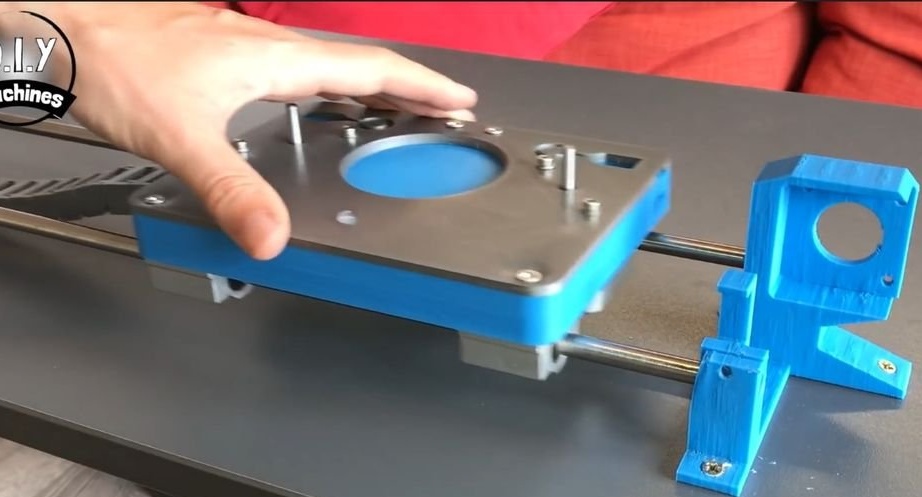
Βήμα πέντε: Πλατφόρμα
Εκτυπώνει το τμήμα 'slider_base_v3.stl'. Διορθώνει μια LED. Εγκαθιστά βηματικούς κινητήρες.
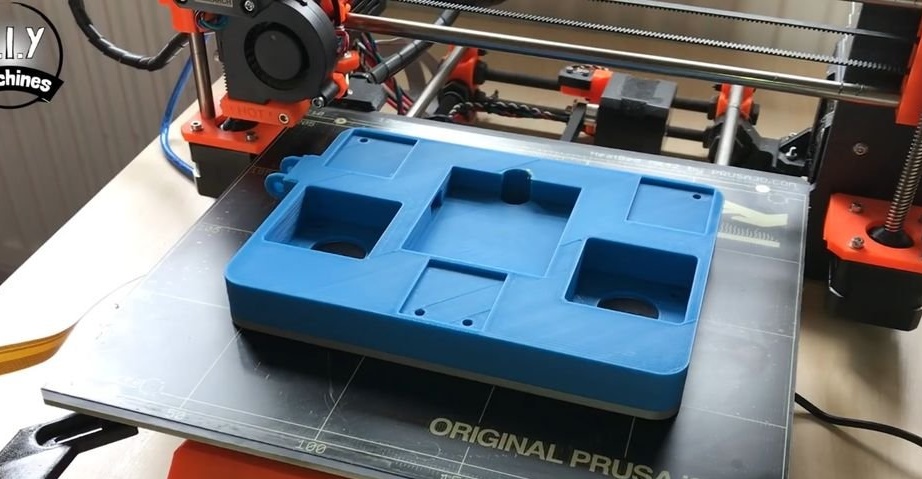

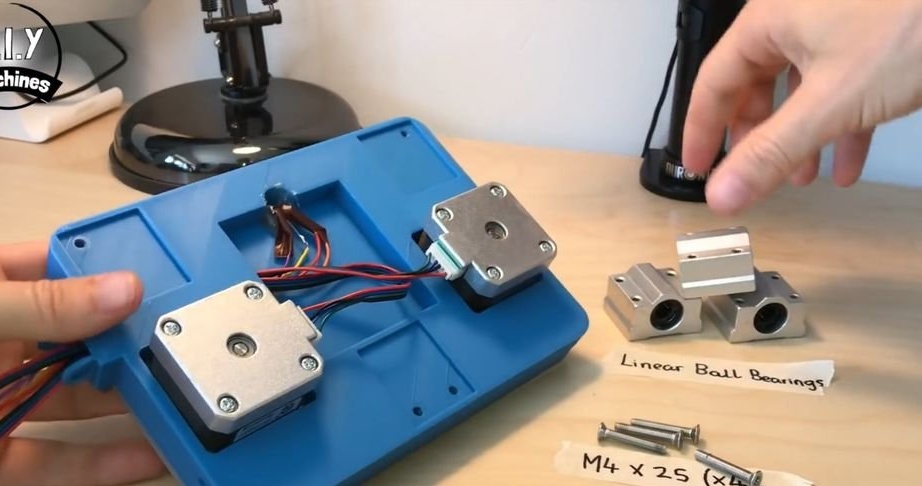
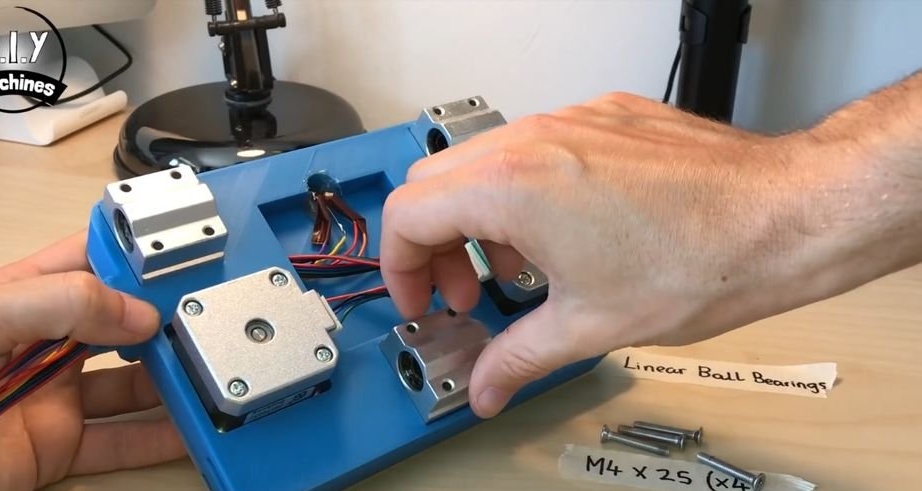
Εγκαθιστά γραμμικά έδρανα.
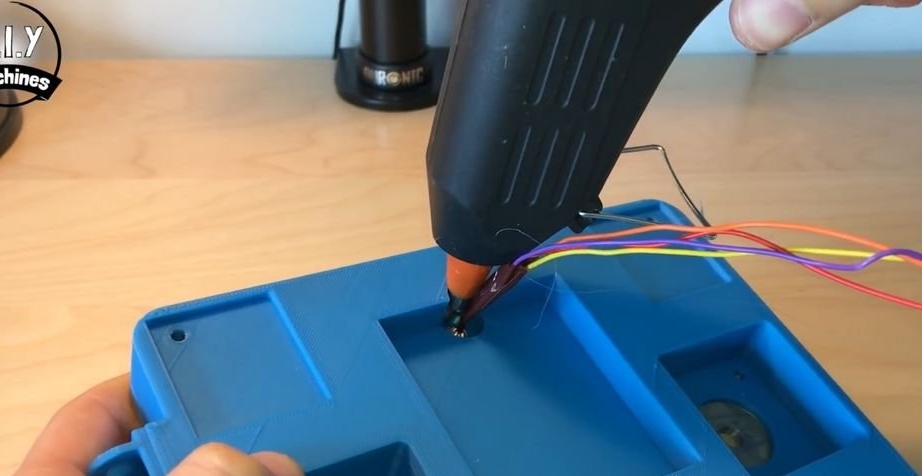
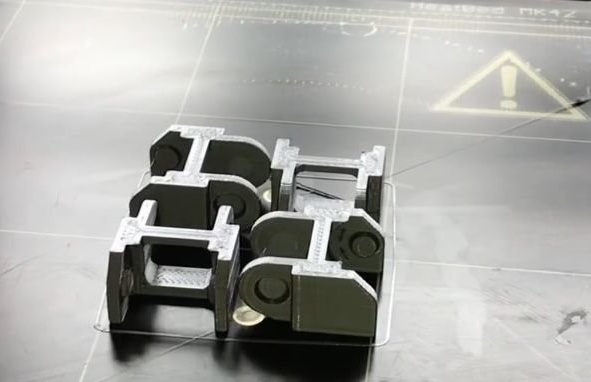
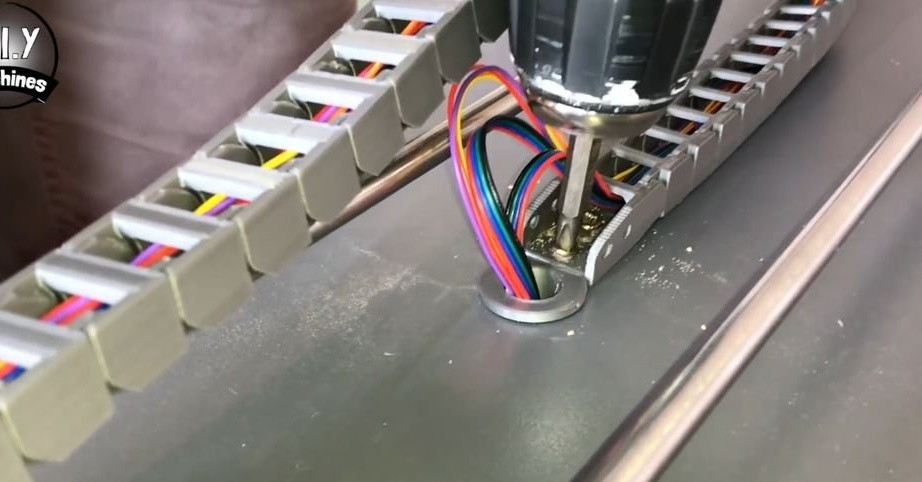
Βήμα έξι: Καλωδιακό κανάλι
Το κανάλι καλωδίου για τη συσκευή αποτελείται από χωριστά τμήματα συνδεδεμένα σε ένα μόνο κύκλωμα.Στο εσωτερικό του κυκλώματος τοποθετούνται καλώδια. Η αλυσίδα μπορεί να κινηθεί και να κάμπτεται εάν είναι απαραίτητο. Τα τμήματα αλυσίδας εκτυπώνονται επίσης στον εκτυπωτή.


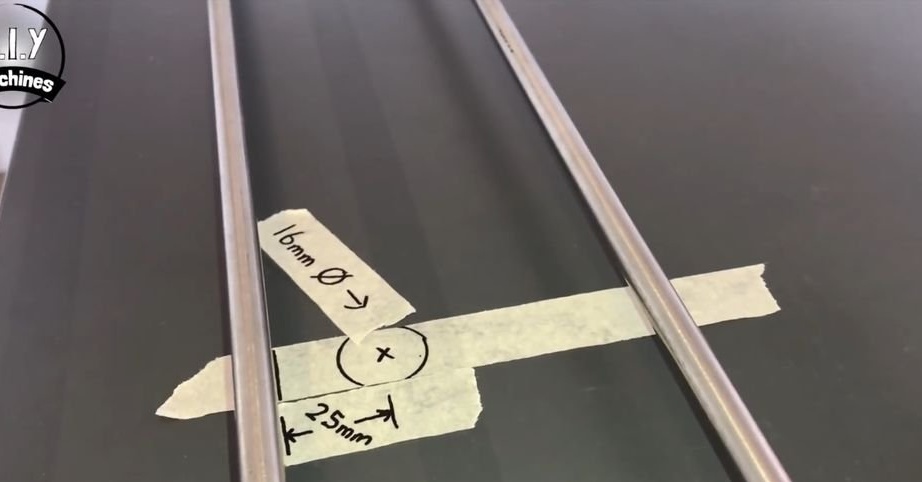
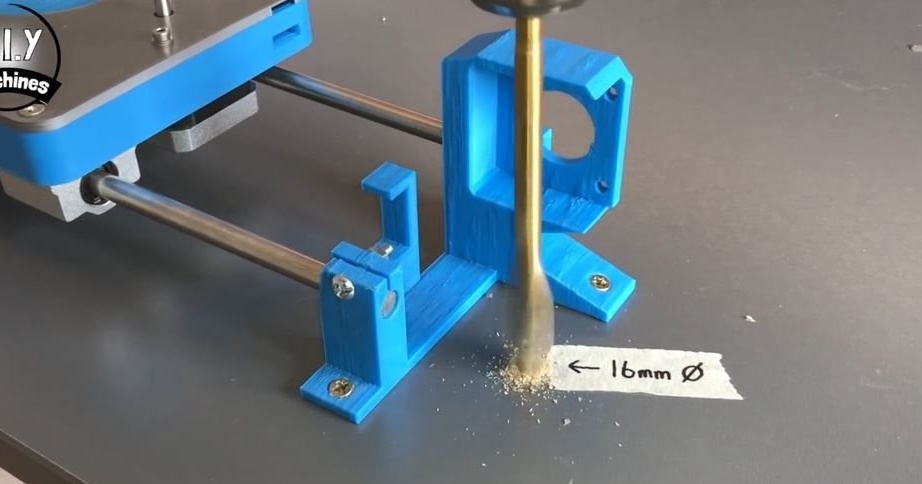
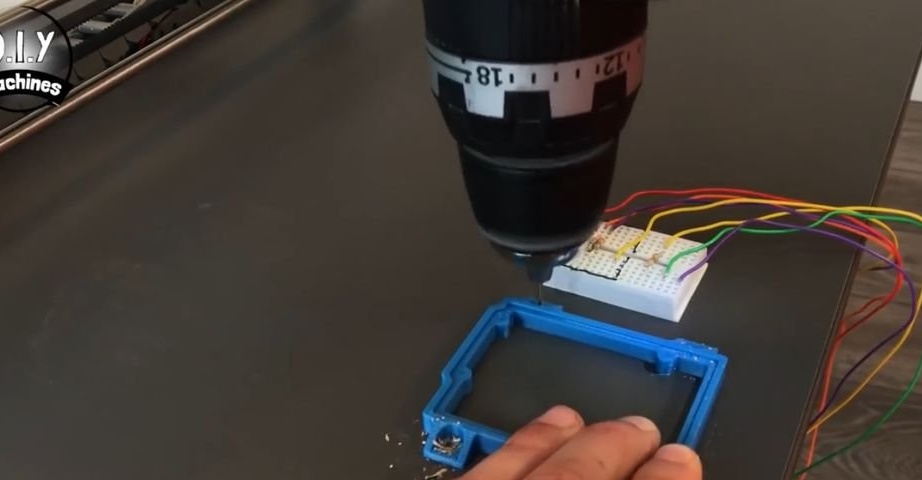
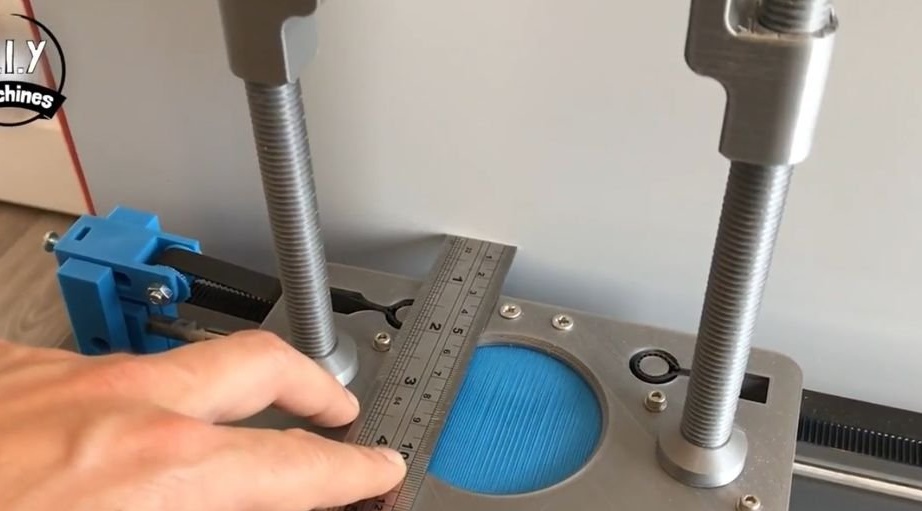
Σε απόσταση 25 mm από τον ακραίο οδηγό και 47 cm από τον εντατήρα, τρυπά μια οπή 16 mm. Εισάγει το μανίκι "Table_Tidy.STL" στην τρύπα. Στερεώνει το κανάλι καλωδίου ένα άκρο στην πλατφόρμα, το δεύτερο στον πάγκο δίπλα στο μανίκι. Τεντώνει καλώδια.



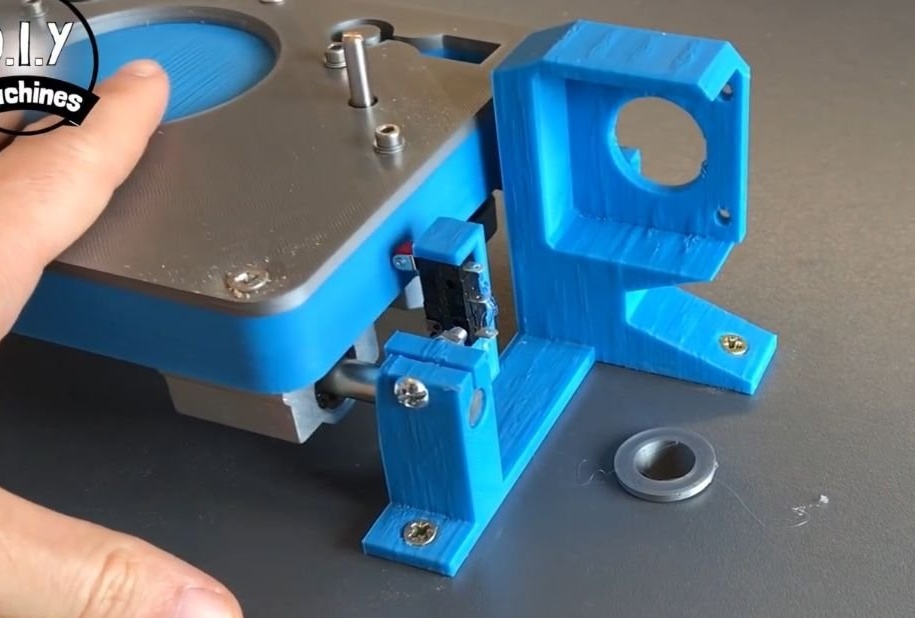
Έβδομο βήμα: διακόπτης
Δίπλα στο στήριγμα του κινητήρα, ανοίγει άλλη οπή 16 mm. Εισάγει ένα μανίκι σε αυτό. Στερεώνει το ρυμουλκούμενο στη βάση. Συνδέστε τις επαφές του για ένα σύρμα 1 μέτρου.

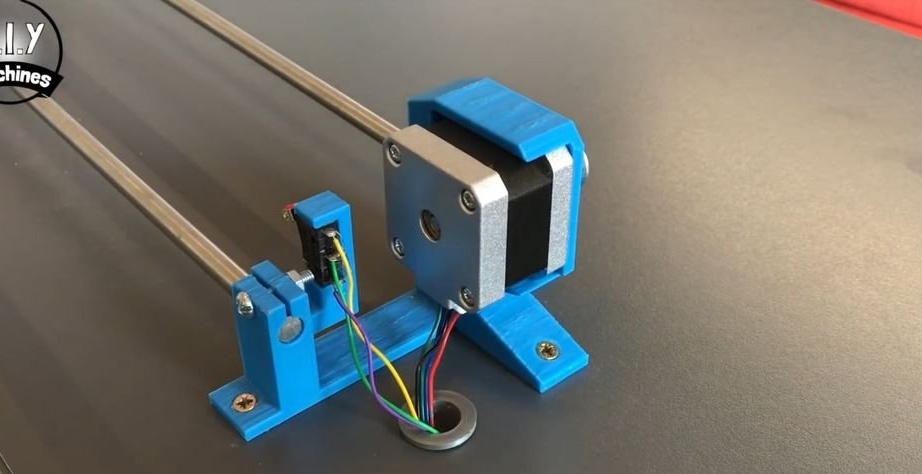
Βήμα οκτώ: Κινητήρας αξόνων Χ
Διασφαλίζει τον κινητήρα να τοποθετηθεί.

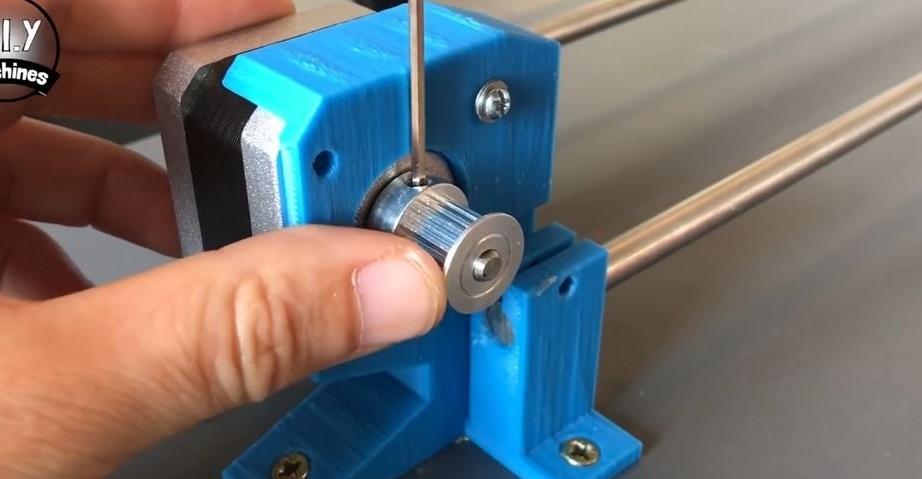
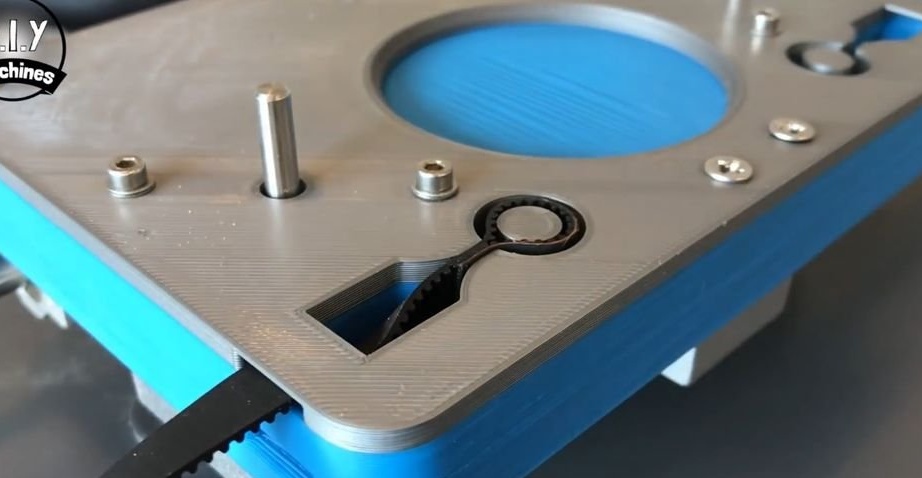
Βήμα εννέα: Ζώνη
Ασφαλίζει τη τροχαλία στον άξονα του κινητήρα. Στερεώνει το άκρο της ζώνης στις υποδοχές της πλατφόρμας. Τραβήξτε τον ιμάντα μέσω της τροχαλίας και μέσω της τροχαλίας εντατήρα. Στερεώνει το δεύτερο άκρο στις θήκες. Εάν είναι απαραίτητο, η τάνυση του ιμάντα μπορεί να ρυθμιστεί σφίγγοντας ή ξεβιδώνοντας τη βίδα.







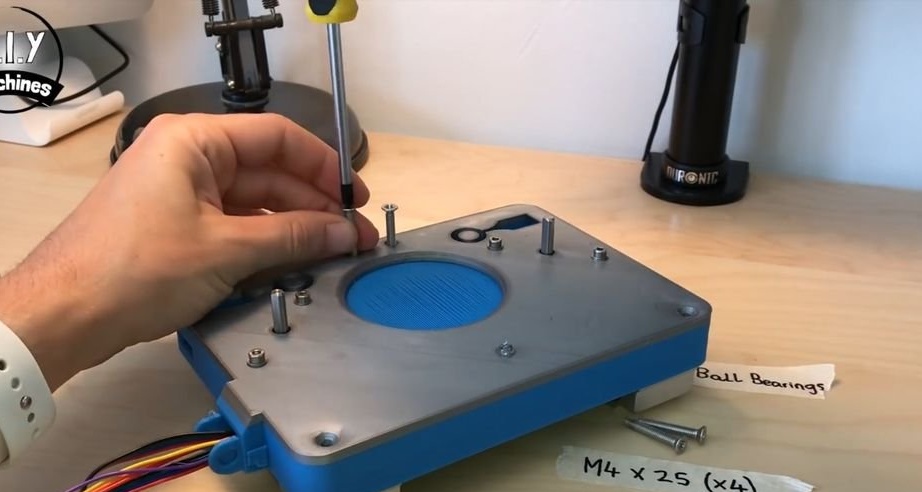
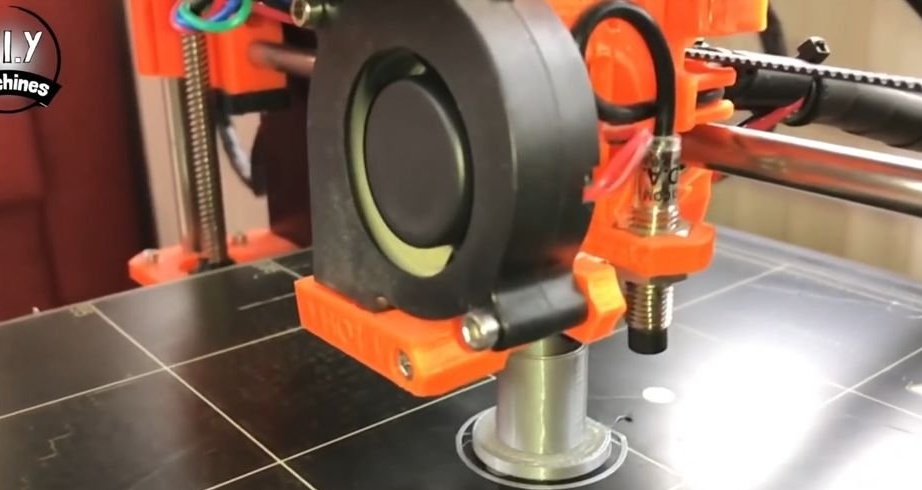
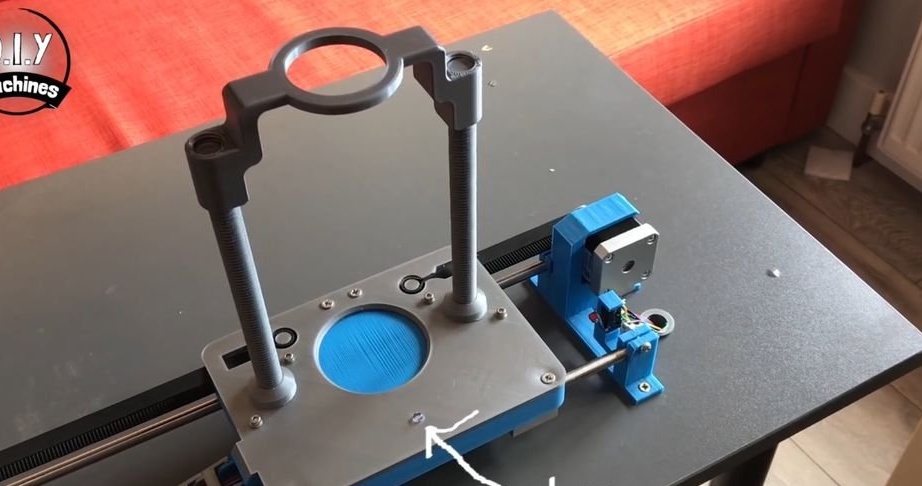
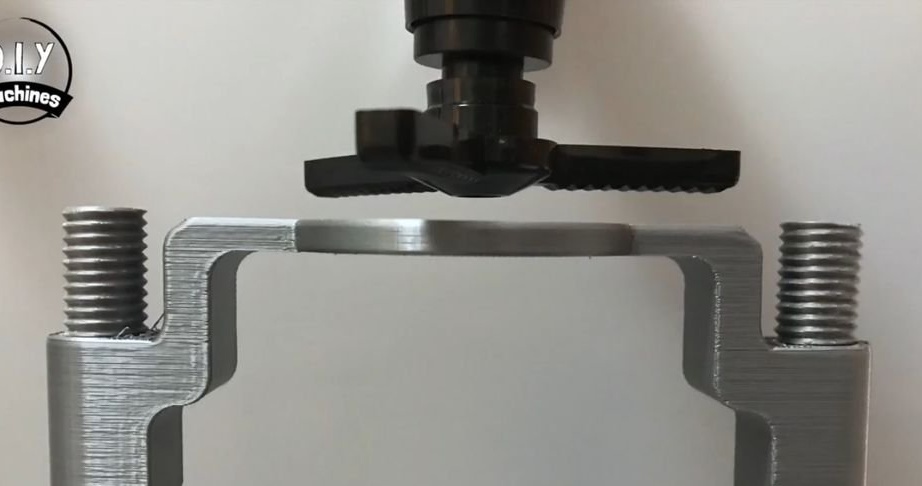
Βήμα δέκα: Κάτοχος κυπέλλου
Εκτυπώνει δύο ράβδους με σπείρωμα main_rod2.3.STL και τη θήκη Dispenser_Paddle_V2.STL. Κουνάει σε πλατφόρμα.



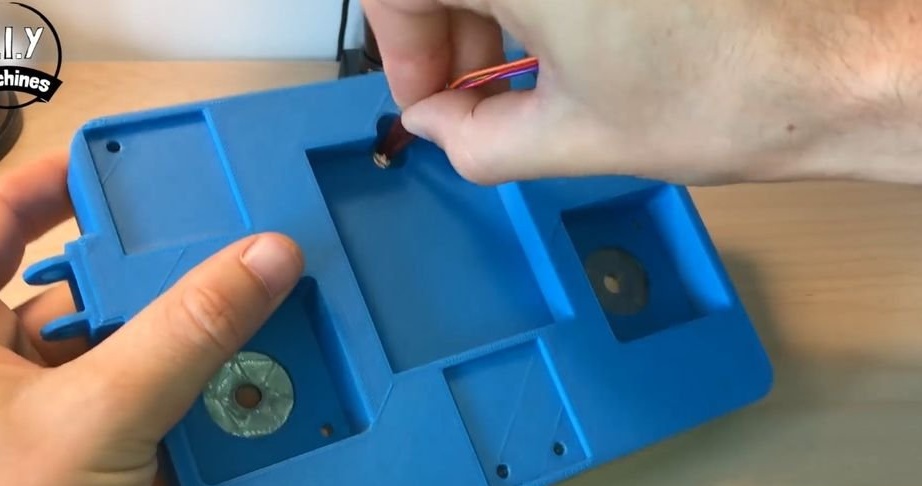
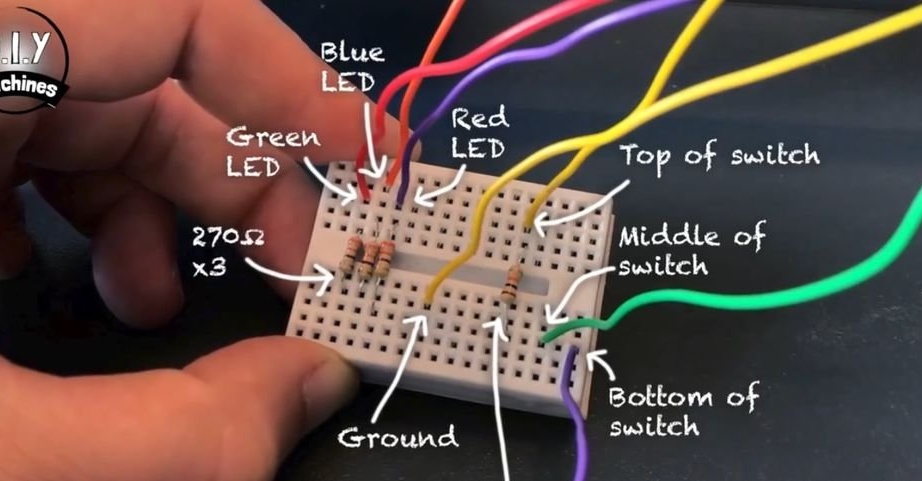
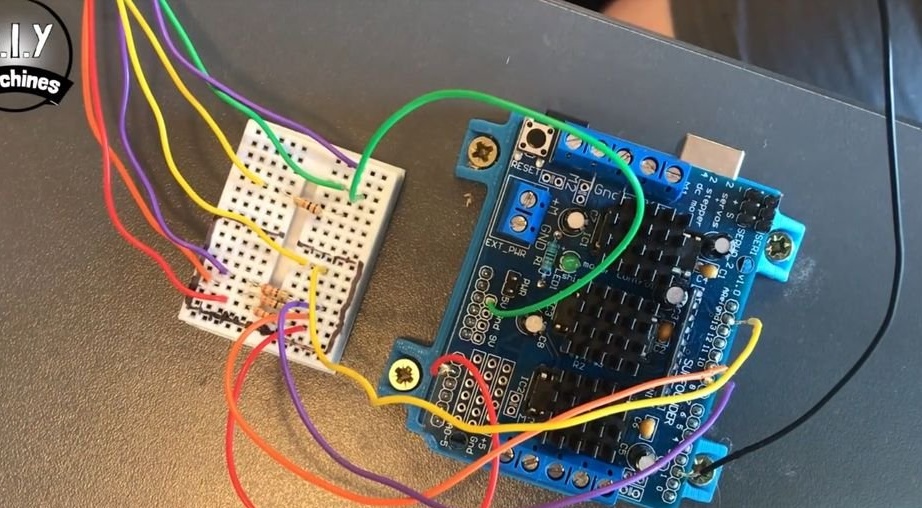
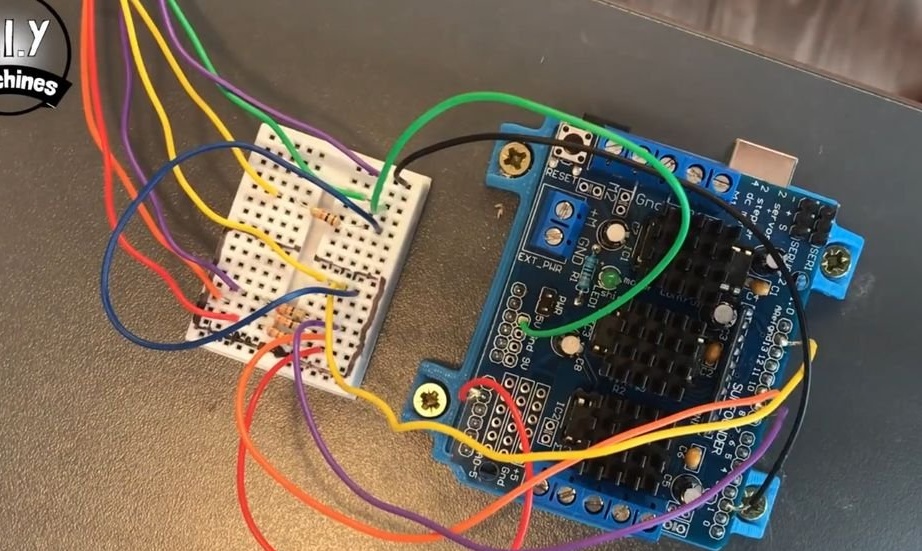
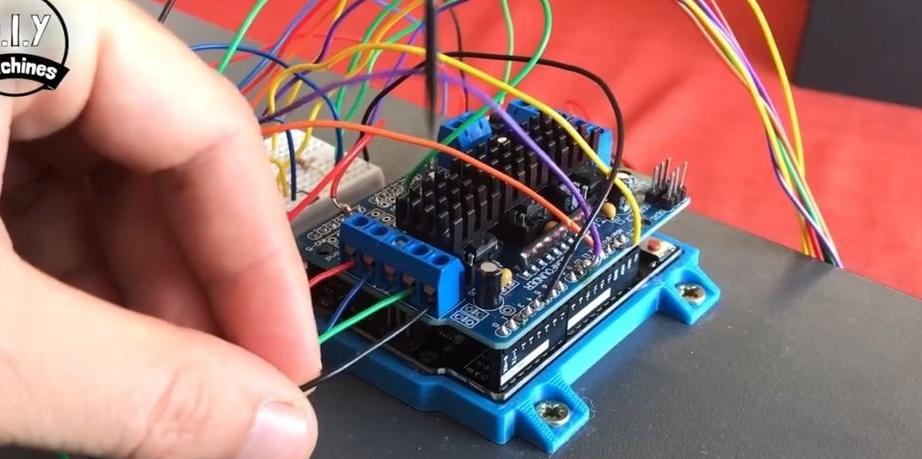
Βήμα ένδεκα: ένδειξη, ρυμουλκούμενο, breadboard
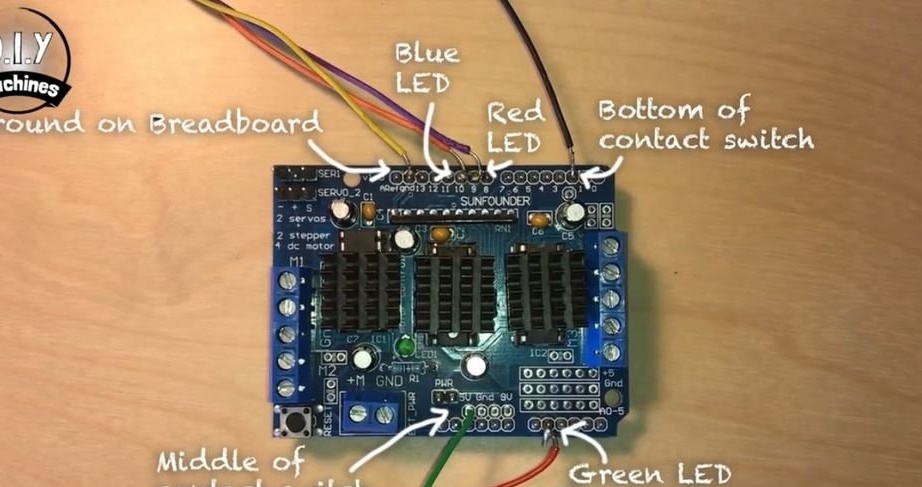
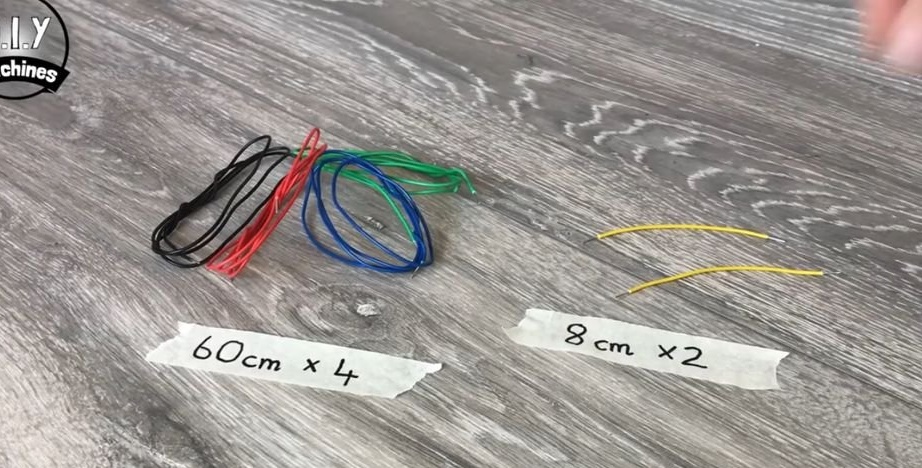
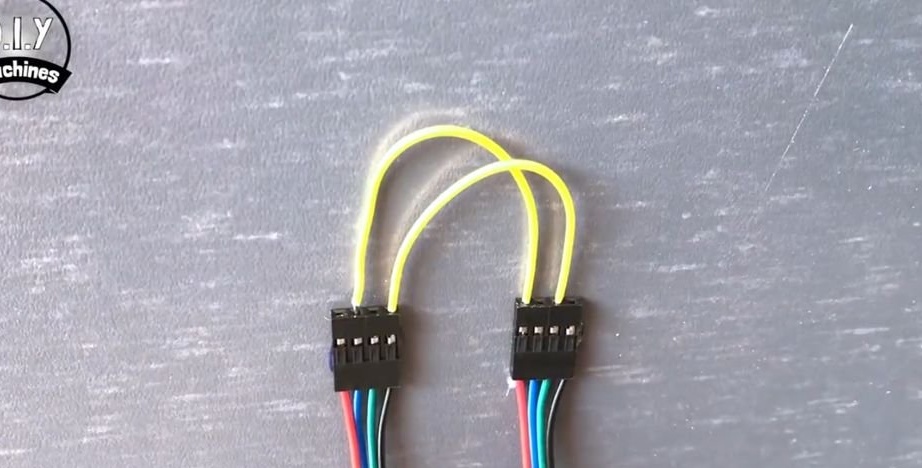
RGB LED, έχει τέσσερα πόδια. Ένα πόδι είναι κοινό και τρία χρώματα. Ο πλοίαρχος παίρνει τέσσερα επιπλέον καλώδια, μήκους περίπου 15 cm, και τα συνδέει ως εξής (με τα χρώματα της λάμψης LED) στη μονάδα του οδηγού κινητήρα:
Κόκκινο για ακίδα D9
Μπλε για την καρφίτσα D10
Πράσινο στον ακροδέκτη Α1
Η κάθοδος στην ακίδα GND.
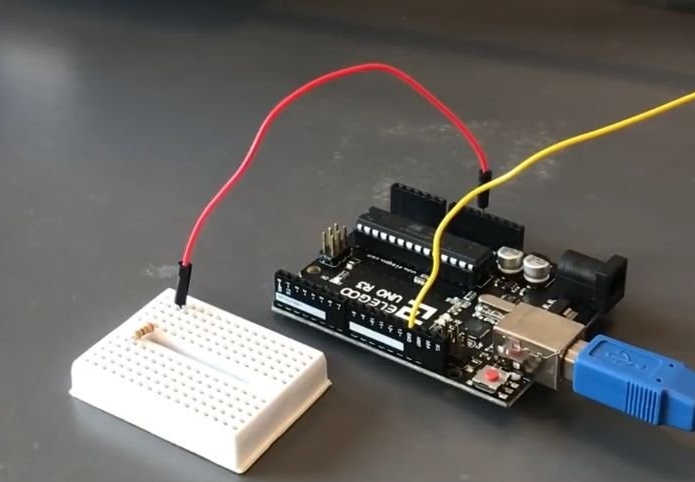
Συνδέει το ρυμουλκούμενο: η άνω επαφή είναι GND, η μεσαία επαφή είναι 5 V, η κάτω επαφή εξέρχεται αριθ. 2.
Στη συνέχεια, τοποθετήστε τα πάντα σε ένα πινέλο (βλ. Φωτογραφία). Ασφαλίζει το τραπέζι στο τραπέζι.
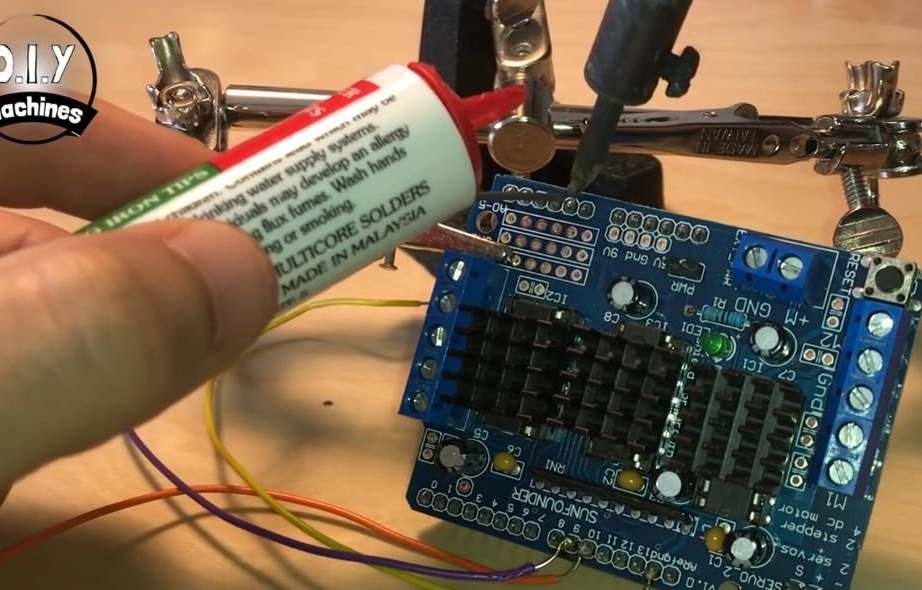
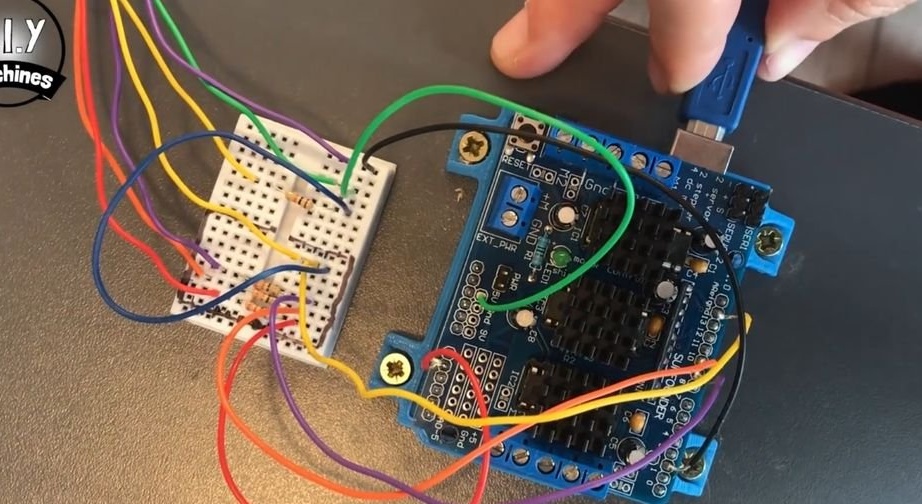
Βήμα δώδεκα: Arduino
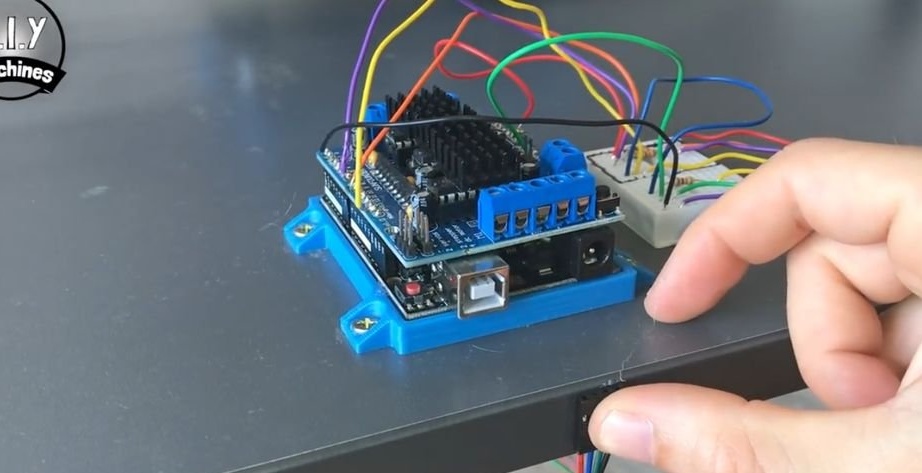
Εκτυπώνει πλάκα στήριξης για το Arduino. Ασφαλίζει την πλάκα στο τραπέζι. Συνθλίβει σε ένα πιάτο του Arduino. Εγκαθιστά μια μονάδα οδηγού κινητήρα στο Arduino.
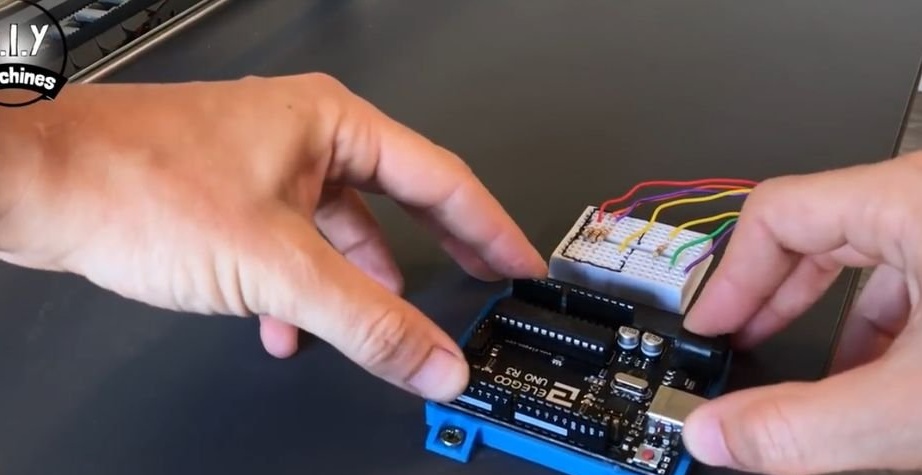
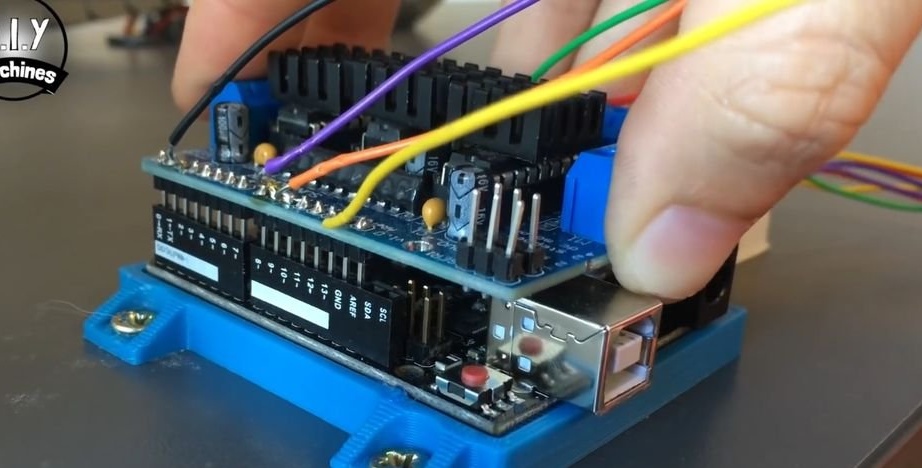
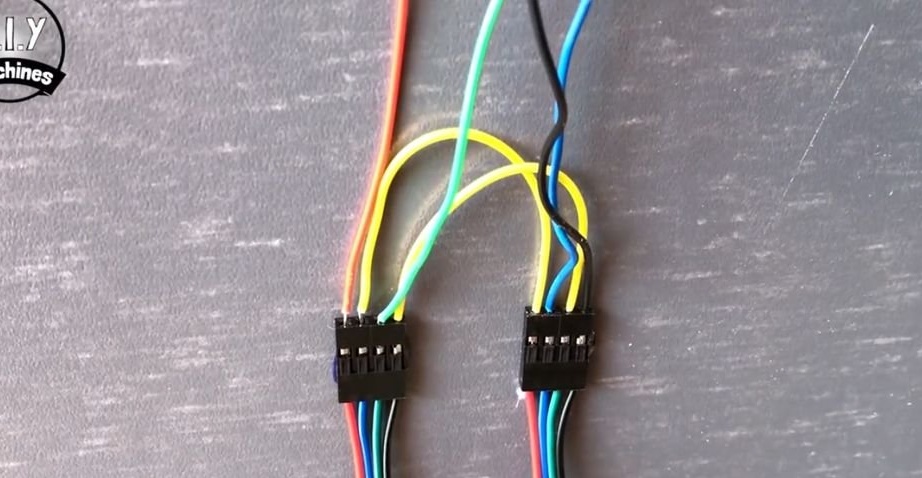
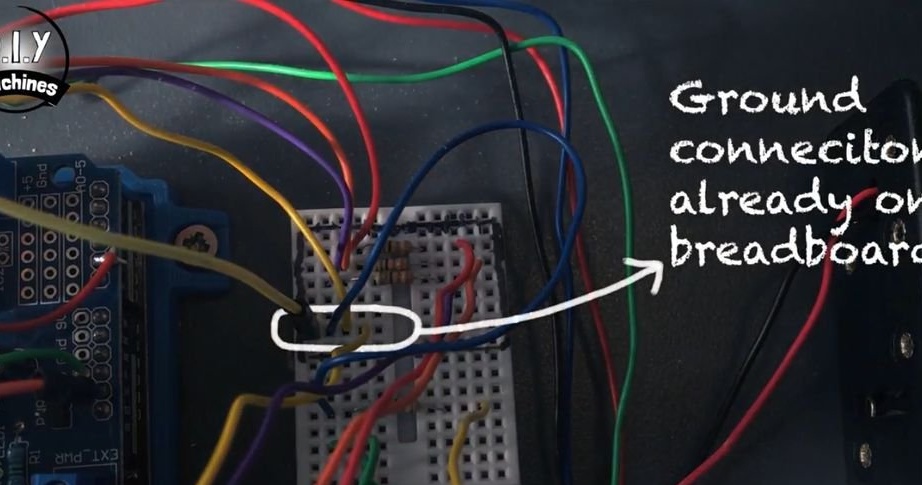
Συνδέει τα καλώδια από τον οδηγό με το breadboard, όπως στη φωτογραφία.
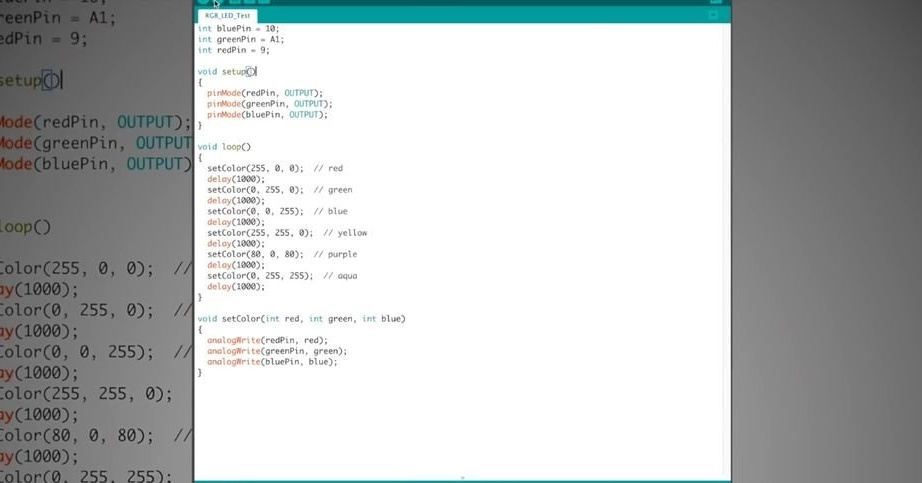
Βήμα δεκατρία: Λήψη κώδικα
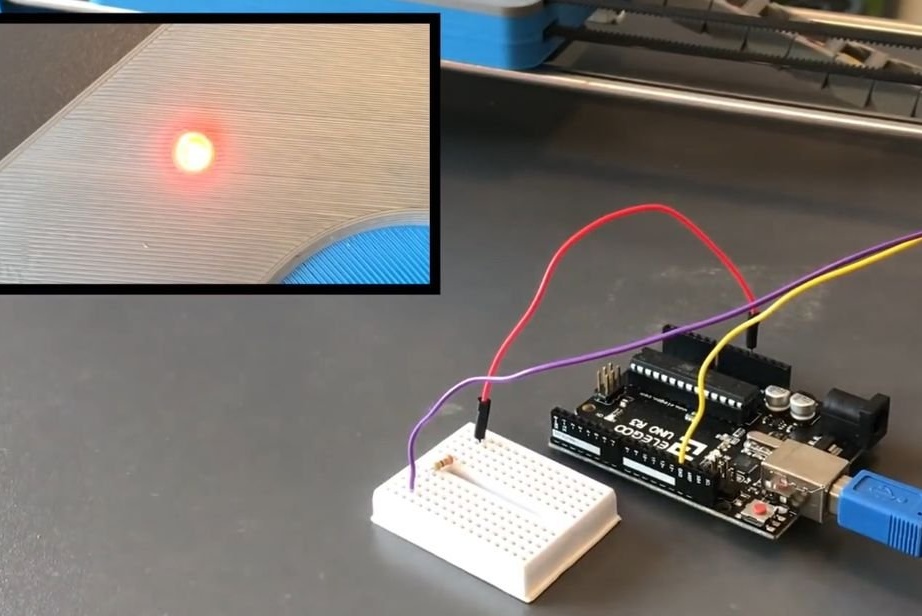
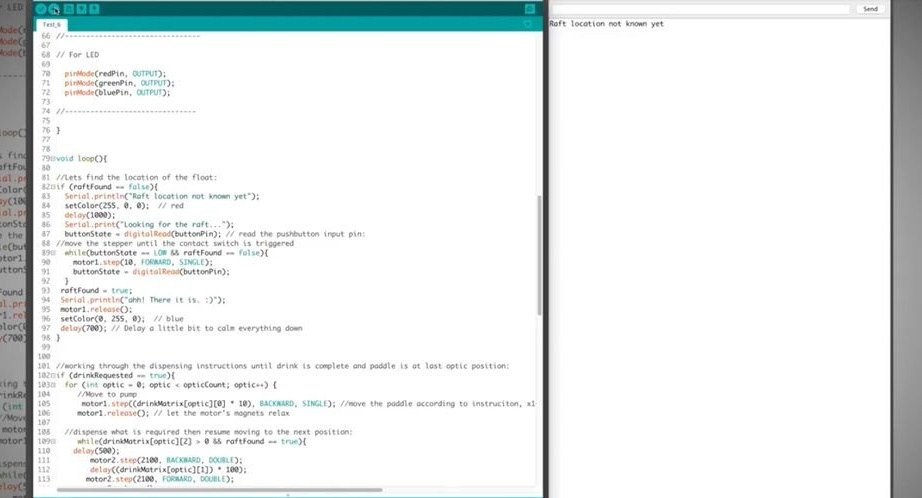
Συνδέει το Arduino με έναν υπολογιστή και κατεβάζει τον κώδικα. Ο κωδικός μπορεί να βρεθεί εδώ.
Εκτελεί τον κωδικό δοκιμής LED. Η λυχνία LED θα πρέπει να ανάβει σε διαφορετικά χρώματα.
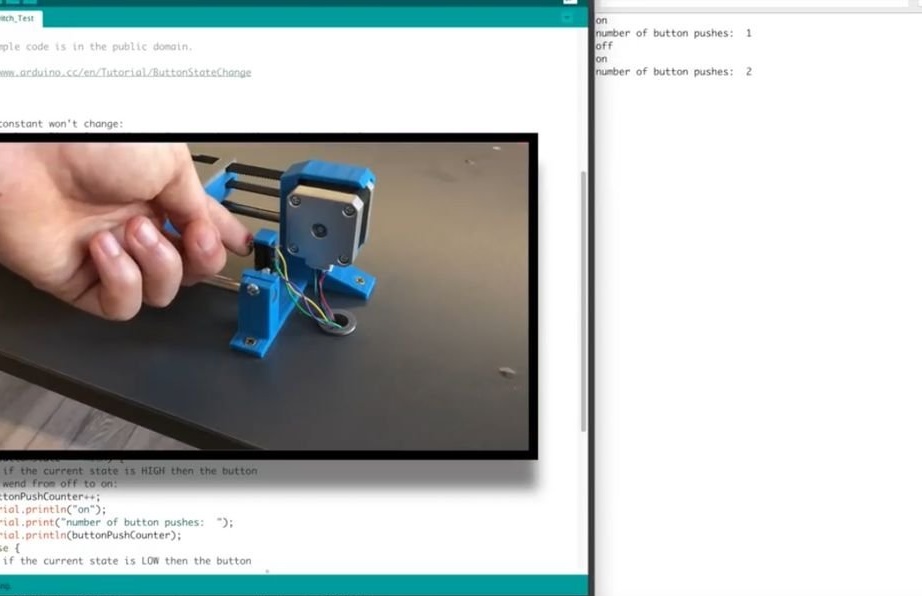
Το ακόλουθο σενάριο για λήψη είναι το "Contact_switch_test". Μόλις τοποθετηθεί, θα πρέπει να εμφανίζεται κάθε φορά ο διακόπτης ορίου στο μόνιτορ.

Βήμα δεκατέσσερα: Σύνδεση των κινητήρων X και Z
Διασφαλίζει τη φίσα που προέρχεται από τον κινητήρα X μέσω του breadboard στο τραπέζι. Συνδέεται με τα καλώδια του οδηγού.
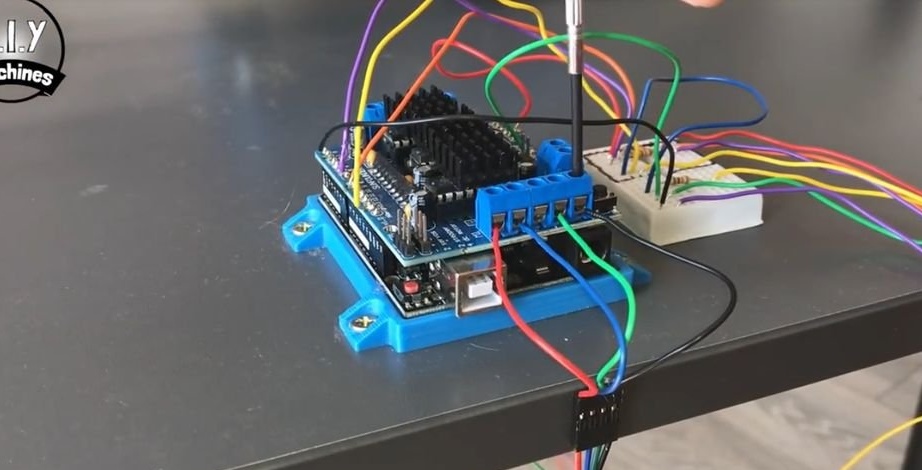
Συνδέει τους βηματικούς κινητήρες του άξονα Ζ.
Βήμα δεκαπέντε: Χώρος μπαταρίας
Καταργεί έναν βραχυκυκλωτήρα σε μια μονάδα. Συνδέει τη θήκη μπαταριών.
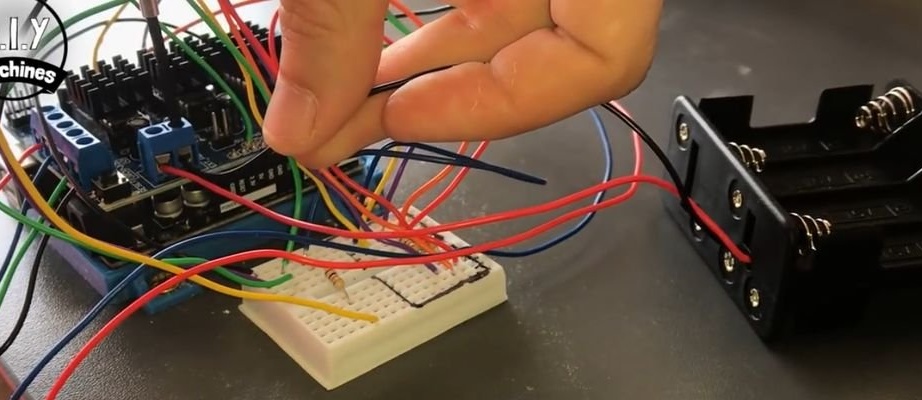
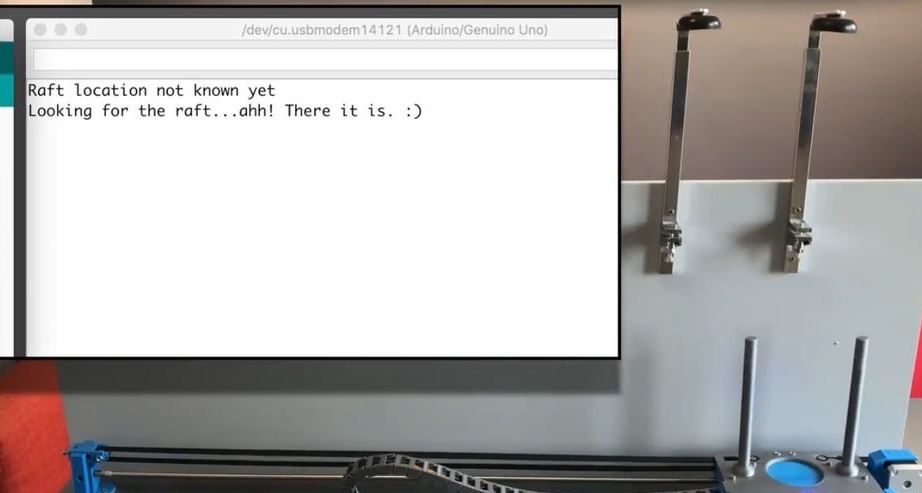
Τώρα μπορείτε να εκτελέσετε "δοκιμή 1". Η κόκκινη λυχνία LED πρέπει να ανάψει και η πλατφόρμα να φτάσει στον τελικό διακόπτη. Στη συνέχεια η λυχνία LED θα γίνει πράσινη.
Βήμα δεκαέξι: κάτοχοι μπουκαλιών
Χρησιμοποιώντας βραχίονες εξασφαλίζει το πίσω τοίχωμα του MDF.




Περαιτέρω μετακινεί την πλατφόρμα 1 cm από τον τελικό διακόπτη. Ευθυγραμμίζει τη θήκη του γυαλιού και ασφαλίζει τη θήκη της φιάλης με το διανομέα (δυστυχώς ο πλοίαρχος δεν έδωσε περιγραφή για την κατασκευή ή την αγορά του κατόχου). Επόμενο. οι υποδοχές τοποθετούνται κάθε 12 εκατοστά.



Βήμα δεκαεπτά: κωδικός, βαθμονόμηση, δοκιμή
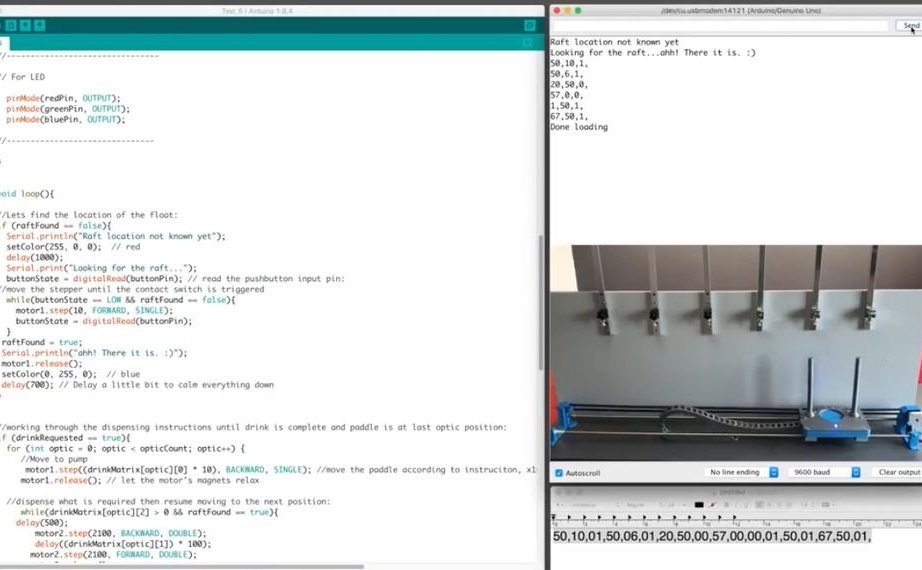
Φορτώνει τον κύριο κώδικα στο https://www.thingiverse.com/thing:2478890
Στη ρύθμιση, ορίζει τις ακόλουθες τιμές: 50,10,01,50,06,01,50,50,00,57,00,00,50,50,02,50,50,00. Ο πλοίαρχος διαθέτει έξι αεροζόλ. Στις ρυθμίσεις υπάρχουν έξι ομάδες τριών, όπου το πρώτο ψηφίο είναι η απόσταση από τον τερματικό διακόπτη, ο πρώτος διανομέας, ο δεύτερος διανομέας κλπ., Ο δεύτερος αριθμός είναι ο χρόνος που το ποτό χύθηκε στο γυαλί, ο τρίτος είναι ο αριθμός χύνοντας. Όλες αυτές οι τιμές μπορούν να αλλάξουν ανάλογα με τις ανάγκες.


Το πρώτο ποτό που έφτιαξε η συσκευή ήταν τζιν και κόλα. Για να εξισώσετε την πίεση στο μπουκάλι με κόλα, πρέπει να κάνετε μια τρύπα. Στη συνέχεια, ο οδηγός ορίζει τις απαραίτητες παραμέτρους.



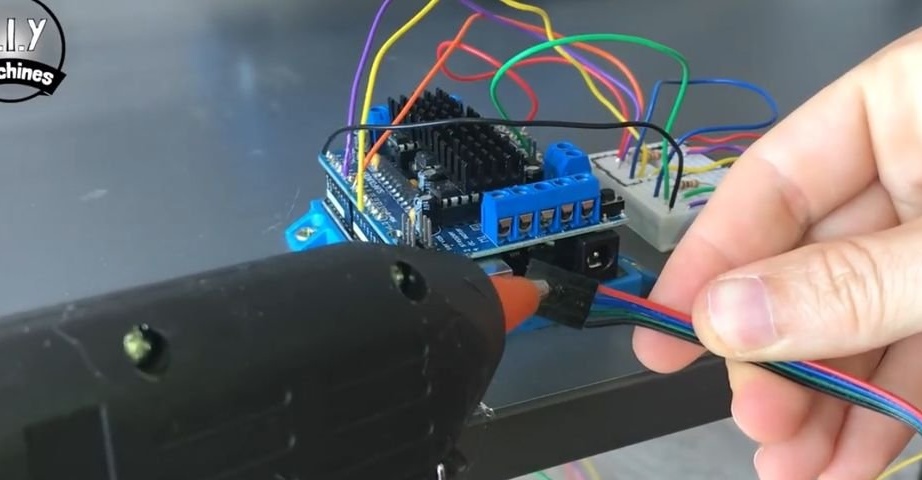
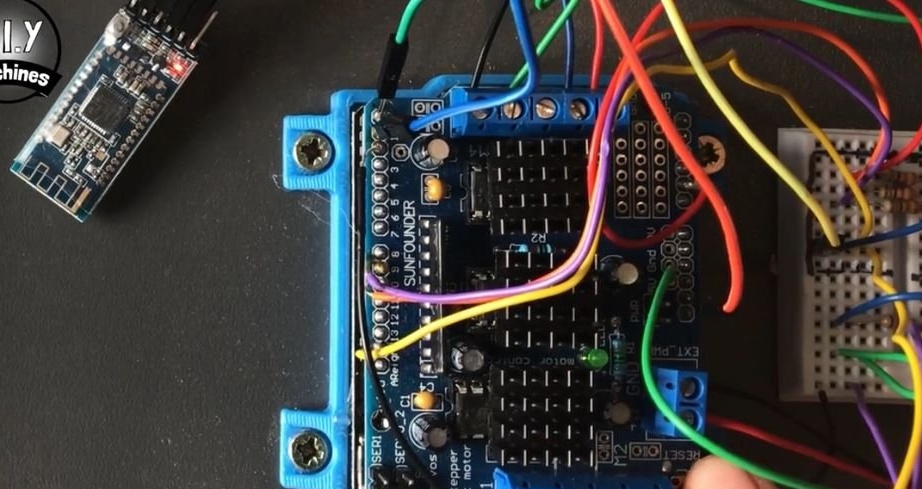
Βήμα δεκαοκτώ: Μονάδα bluetooth
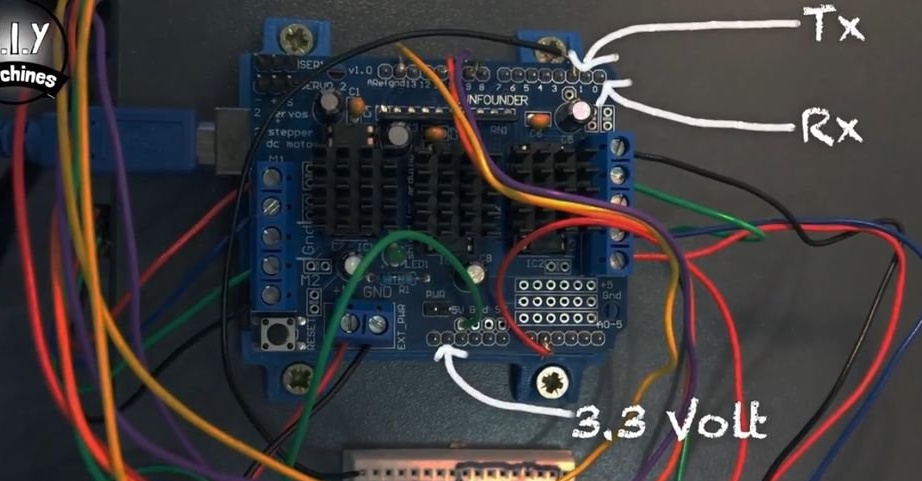
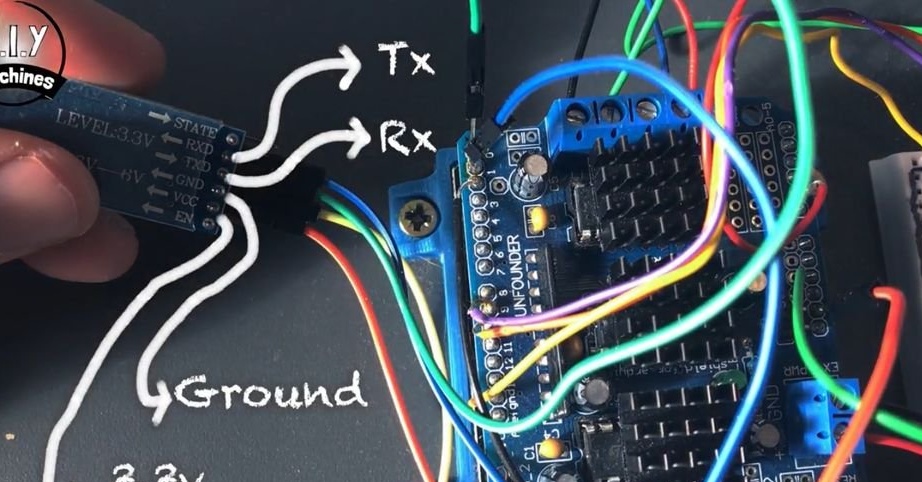
Για να ελέγξετε το μπάρμαν από το gadget, ο πλοίαρχος εγκατέστησε μια μονάδα Bluetooth. Η μονάδα συνδέεται ως εξής.
HM10 -> Ασπίδα Arduino
RXD ------> TX
TXD -------> RX
GND ------> Γείωση
VCC ------> 3.3V

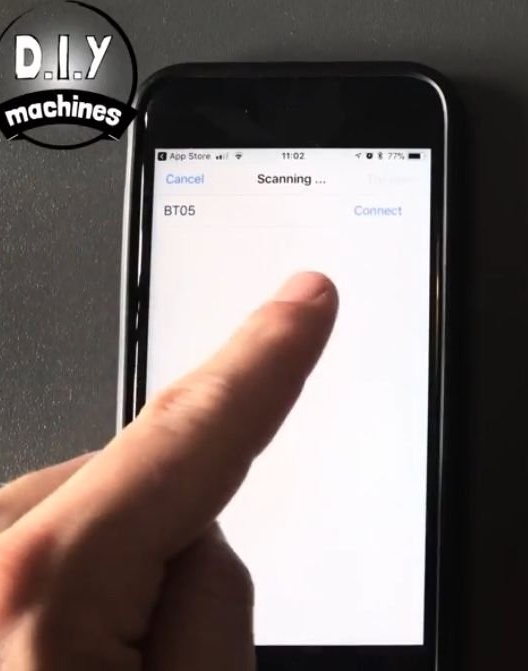
Ο πλοίαρχος διαθέτει ένα smartphone που εκτελεί iOS. Για αυτό το σύστημα, κατεβάζει το "hm10 bluetooth serial lite" από το κατάστημα εφαρμογών. Στη συνέχεια, δημιουργεί συνδέσεις και εισάγει ρυθμίσεις.

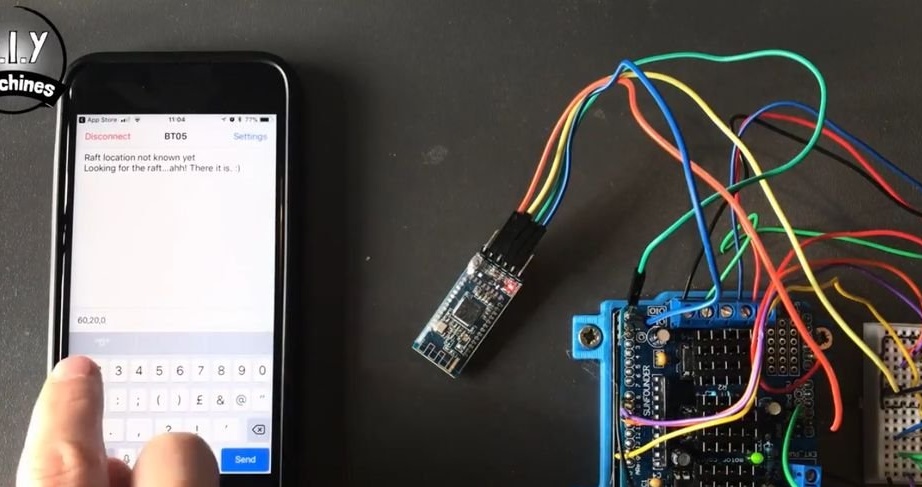
Όλα είναι έτοιμα και για πιο ολοκληρωμένες πληροφορίες μερικά βίντεο.