

Ένα σύντομο άρθρο σχετικά με τον ελεγκτή σέρβο. Ελπίζω ότι θα είναι χρήσιμο για τους συλλέκτες arduino και ρομπότ.
Το πιο συνηθισμένο σερβο μπορεί να ελέγξει τη γωνία περιστροφής του μοχλού από 0 έως 180 μοίρες. Το Servo είναι ένα πολύ κοινό στοιχείο για τη δημιουργία ενός ρομπότ.
Ωστόσο, δεν είναι όλα τα σερβοειδή τα ίδια, ιδιαίτερα φθηνά. Ορισμένες από αυτές δεν διαθέτουν κλειδαριά υπό γωνία 0 και 180 μοίρες, δεν μπορείτε να εντοπίσετε την τρέχουσα θέση του μοχλού πριν συνδέσετε τη δύναμη και δώσετε σήμα. Επομένως, είναι καλύτερα να το ελέγξετε πριν από τη χρήση.
Αυτό το εργαλείο θα σας βοηθήσει να ελέγξετε το σέρβο πριν το εγκαταστήσετε.
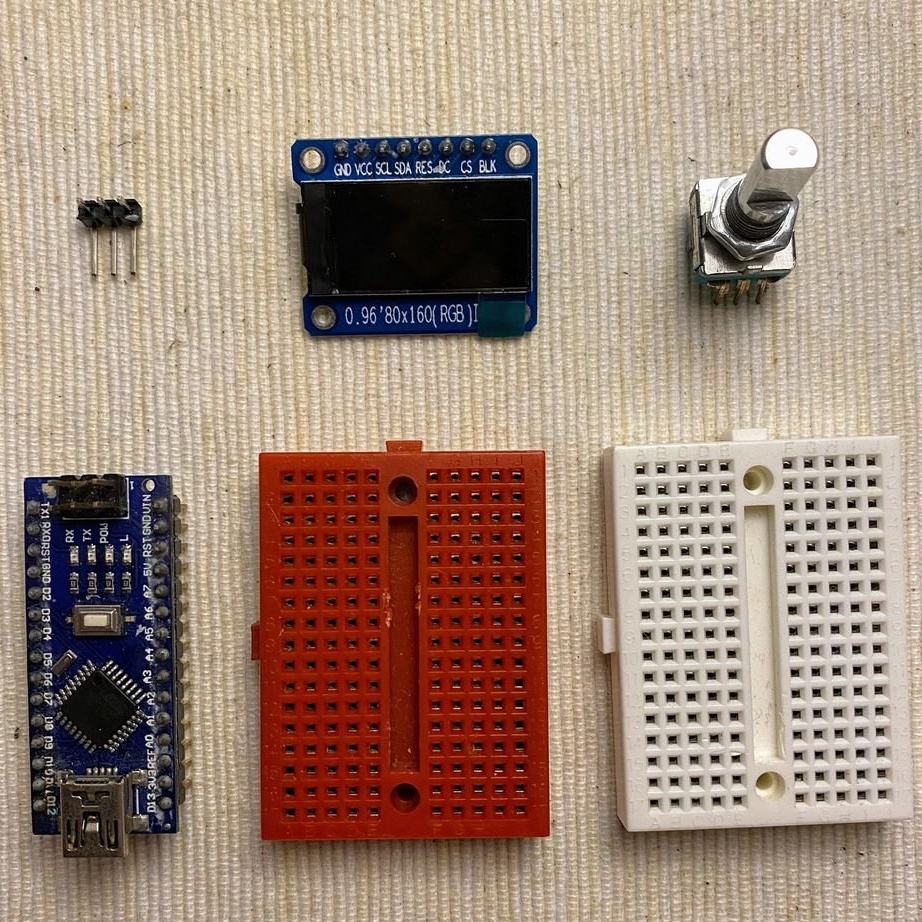
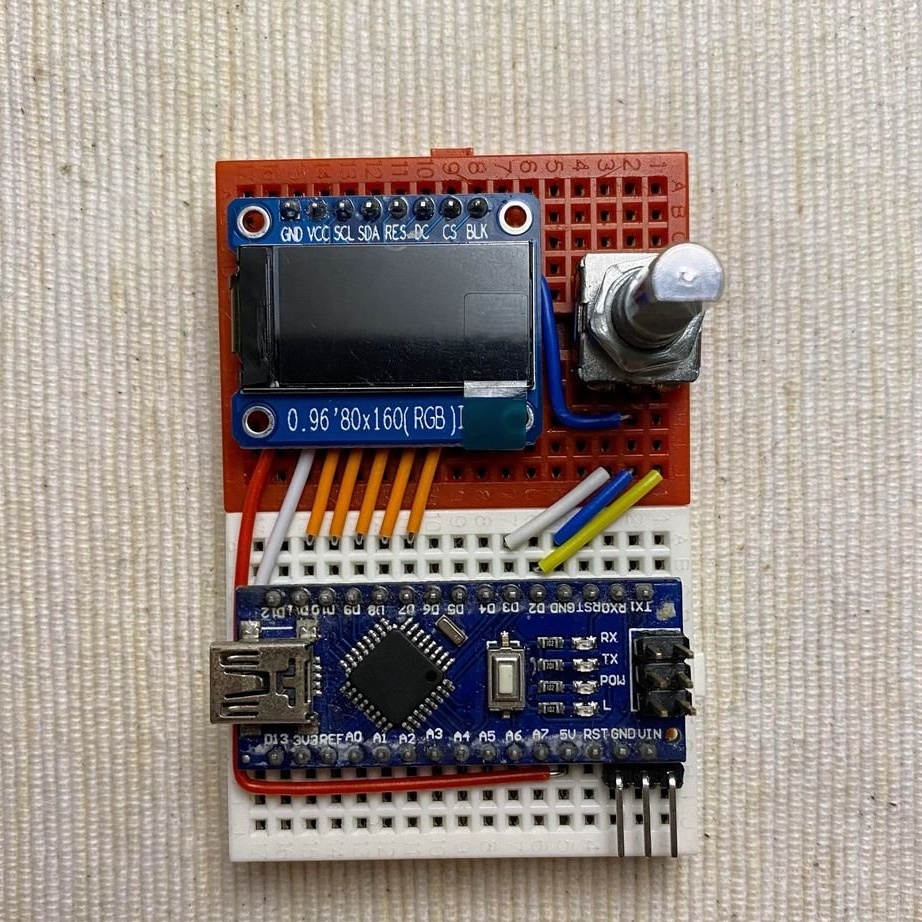
Για την κατασκευή του δοκιμαστή χρειάζονται τα ακόλουθα εξαρτήματα:
-Arduino;
-Εμφάνιση (στην περίπτωση αυτή ST7735 80 x 160 IPS LCD).
-Παροχή για σερβο (καλύτερη 3-ακίδων, 90 μοίρες).
Κωδικοποιητής
-Board;
- Καλώδια με πλάκες.
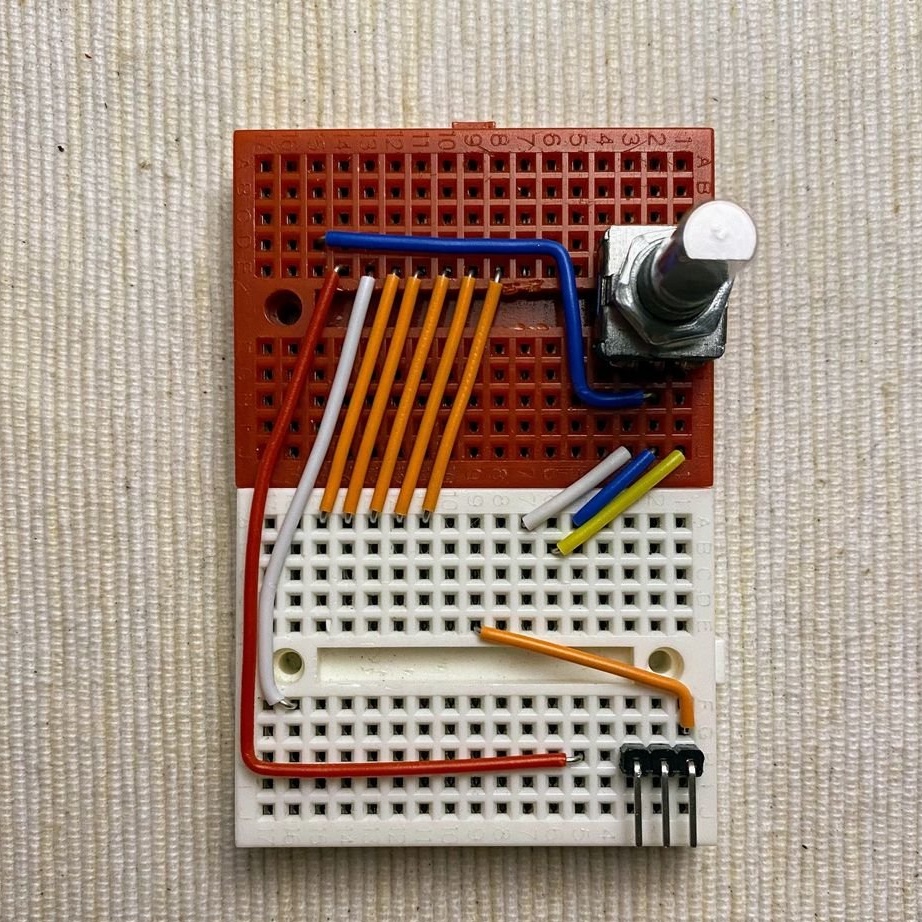
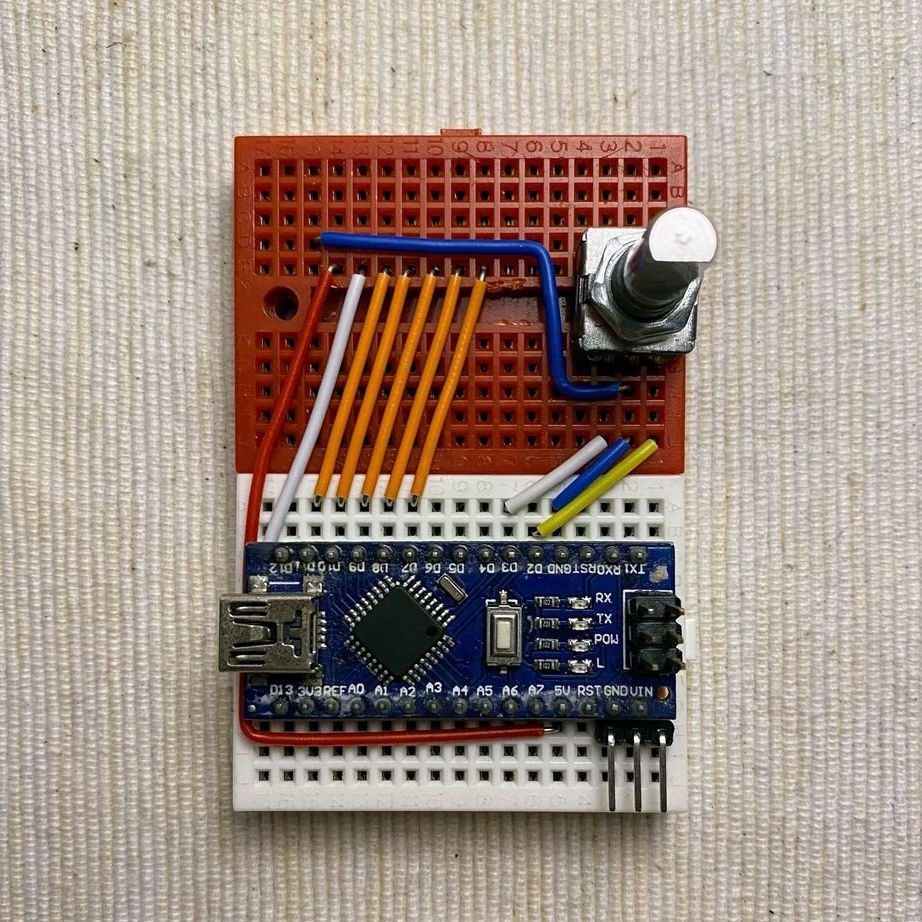
Στη συνέχεια, πρέπει να συναρμολογήσετε τη συσκευή και να την συνδέσετε με την ακόλουθη σειρά.
Arduino Νάνο
D2 -> Περιστροφική έξοδος A
D3 -> Περιστροφική έξοδος B
GND -> περιστρεφόμενο GND, κεφαλίδα σερβομηχανισμού 1, LCD GND
5V -> Servo Pin Header 2, LCD Vcc
D5 -> Header Pin Servo 3
D7 -> LCD BLK
D8 -> LCD CS
D9 -> LCD DC
D10 -> LCD RES
D11 -> LCD SDA
D13 -> LCD SCL
Εγκαταστήστε τη βιβλιοθήκη
Λήψη κώδικα.
Το έργο του ελεγκτή μπορεί να δει στο βίντεο.