
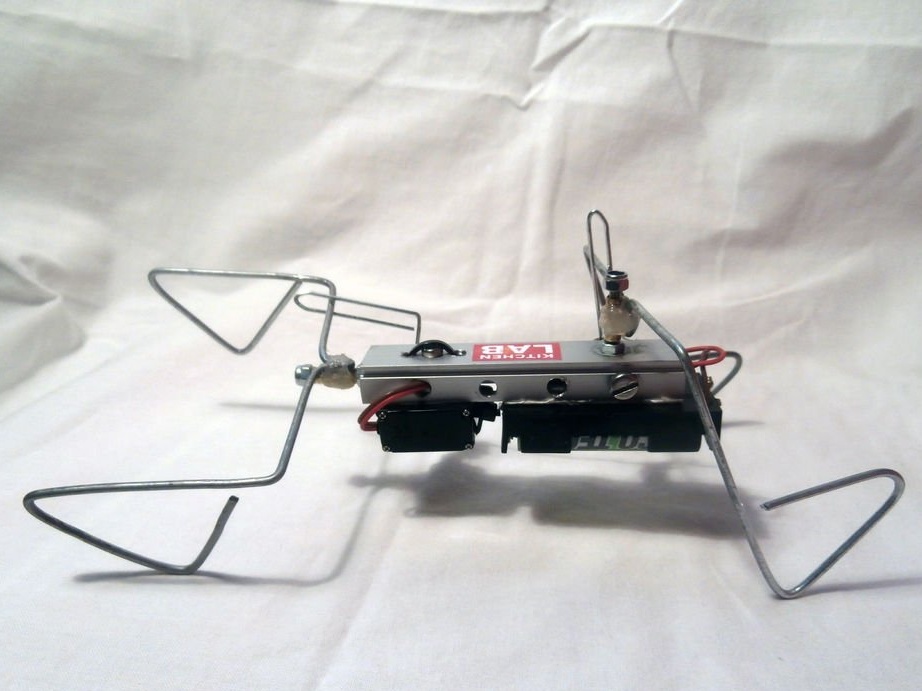
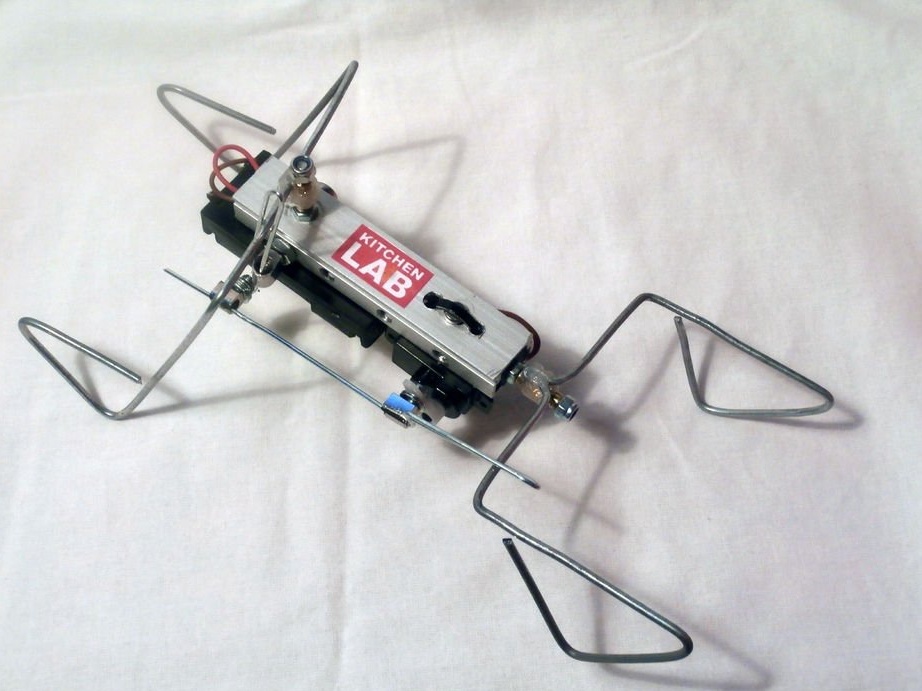
Γεια σε όλους! Εμπνεύστηκα να δημιουργήσω το ρομπότ BEAM μου, έχοντας δει αρκετά από αυτά τα μονοκινητήρια και διδύμονα θαύματα της ρομποτικής στο Διαδίκτυο. Η ιδέα ήταν να δημιουργηθεί ένα ρομπότ που περπατά με τον ίδιο τρόπο όπως οι περιπατητές BEAM 1- ή 2-μοτέρ. Μετά από πολλά αποτυχημένα πειράματα, έκανα αυτό που ήθελα!
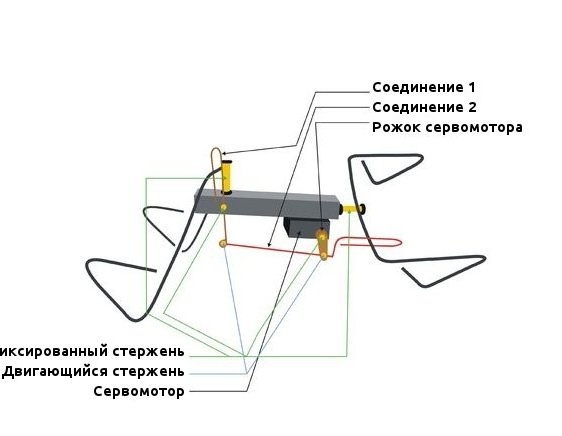
Βήμα 1: Ο μηχανισμός
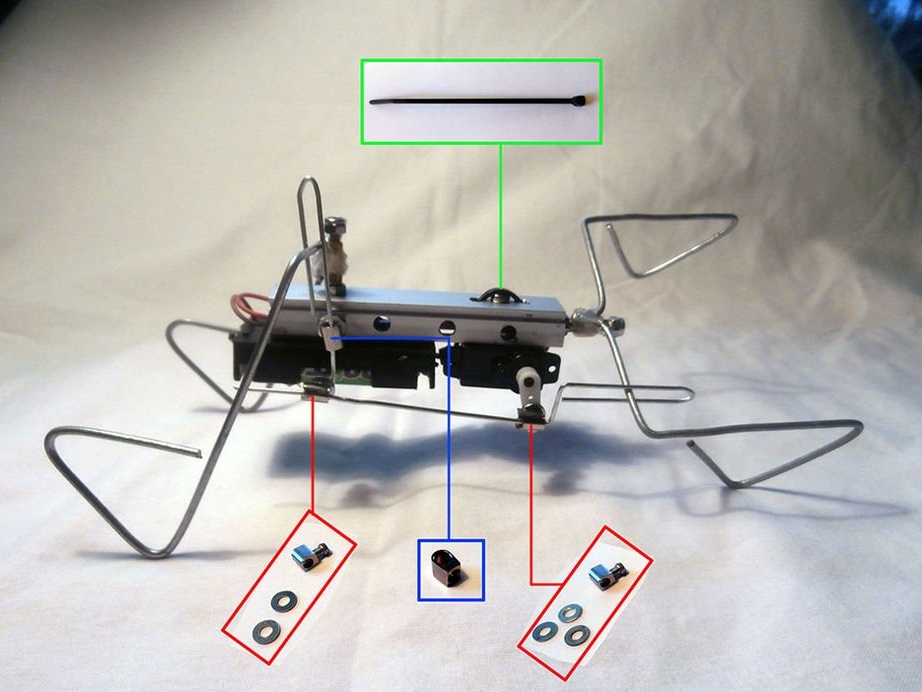
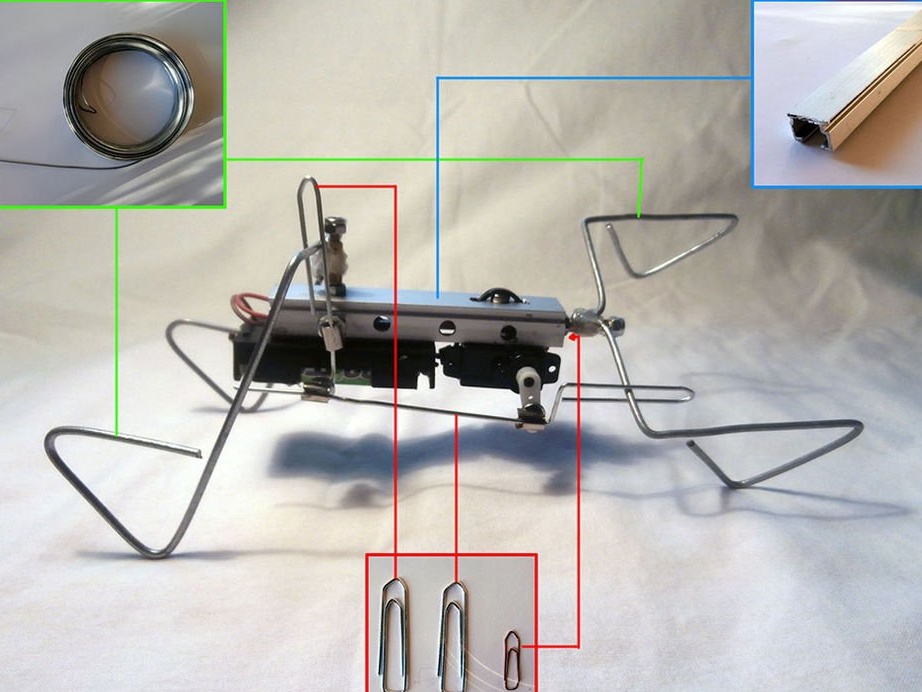
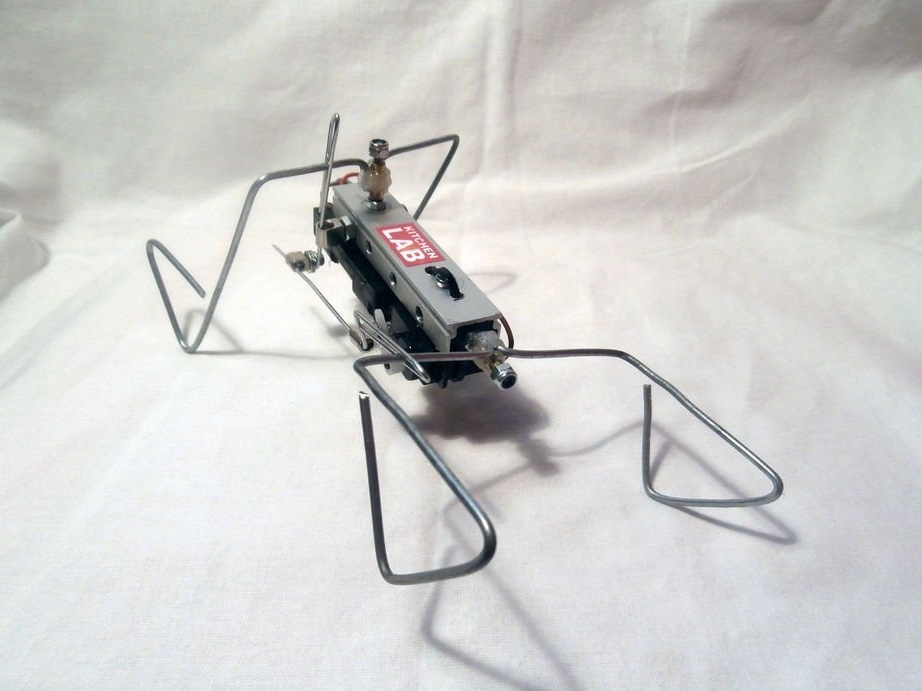
Βήμα 2: Απαιτούμενα εξαρτήματα

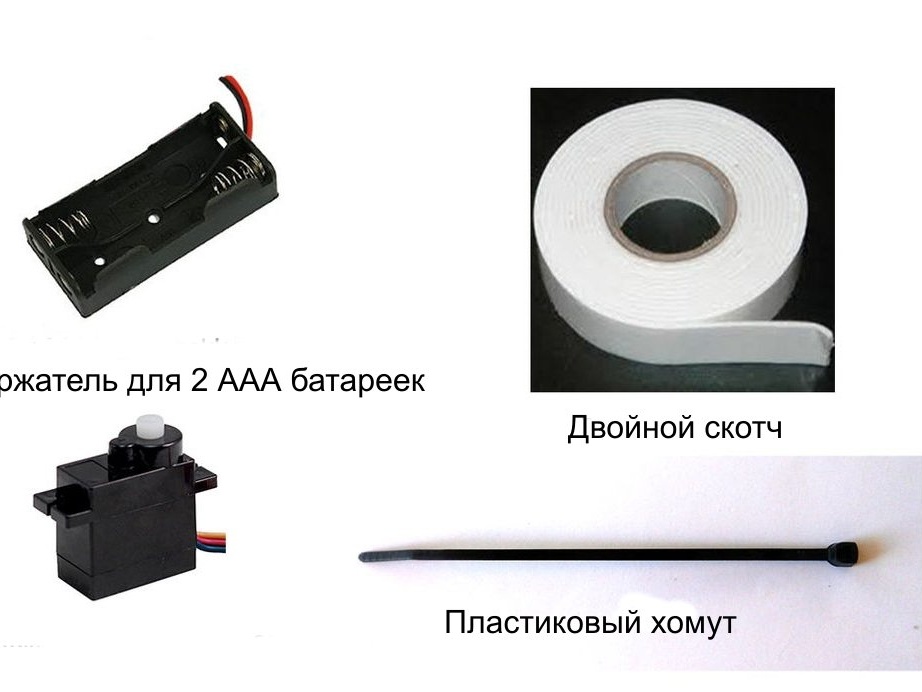



(1x) σερβο συνεχούς περιστροφής
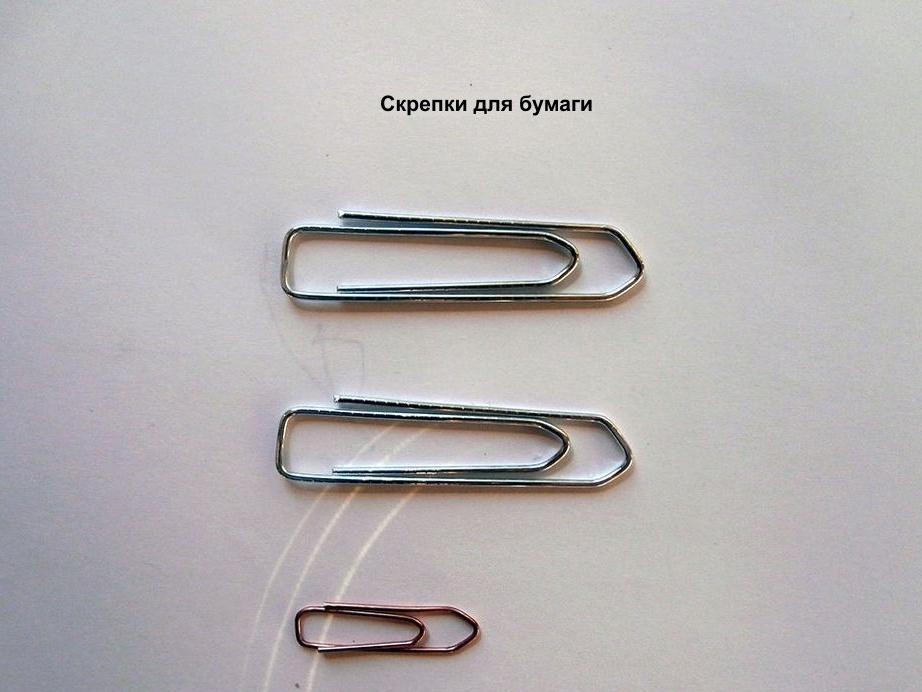
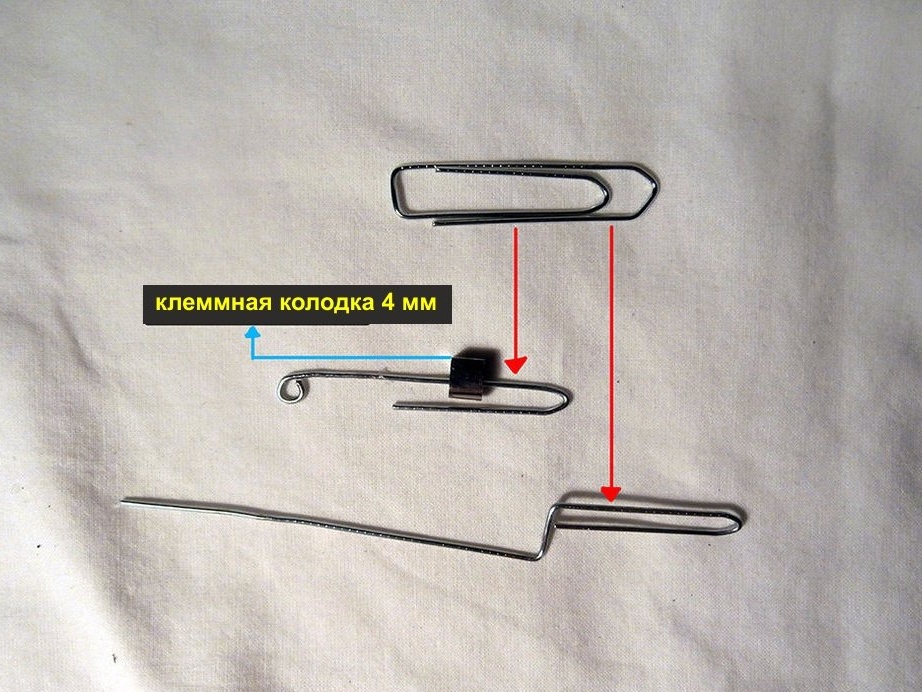
(2x) μεγάλα κλιπ γραφίτη
(1x) μικρό συνδετήρα
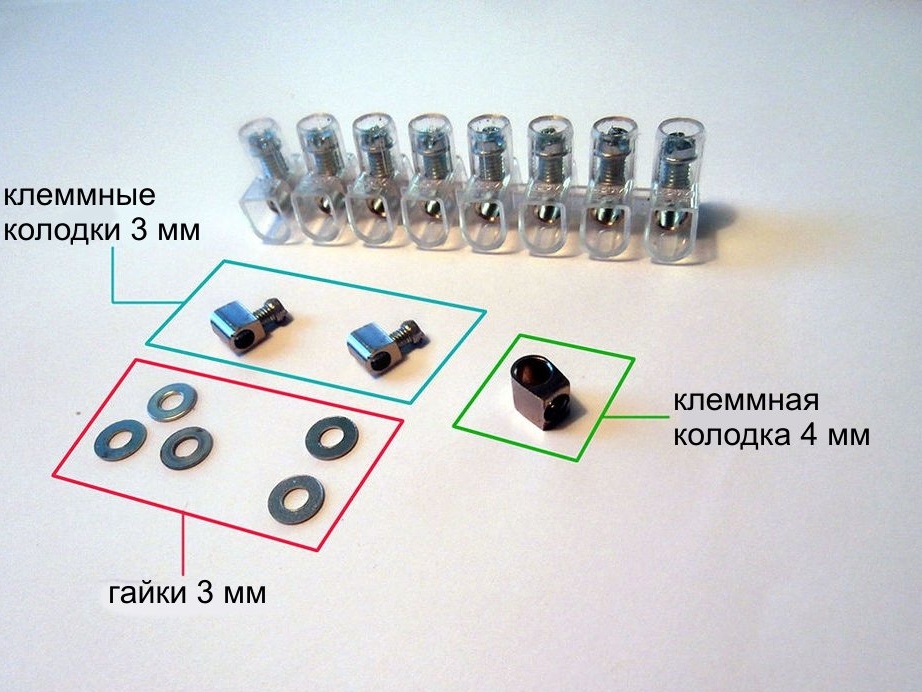
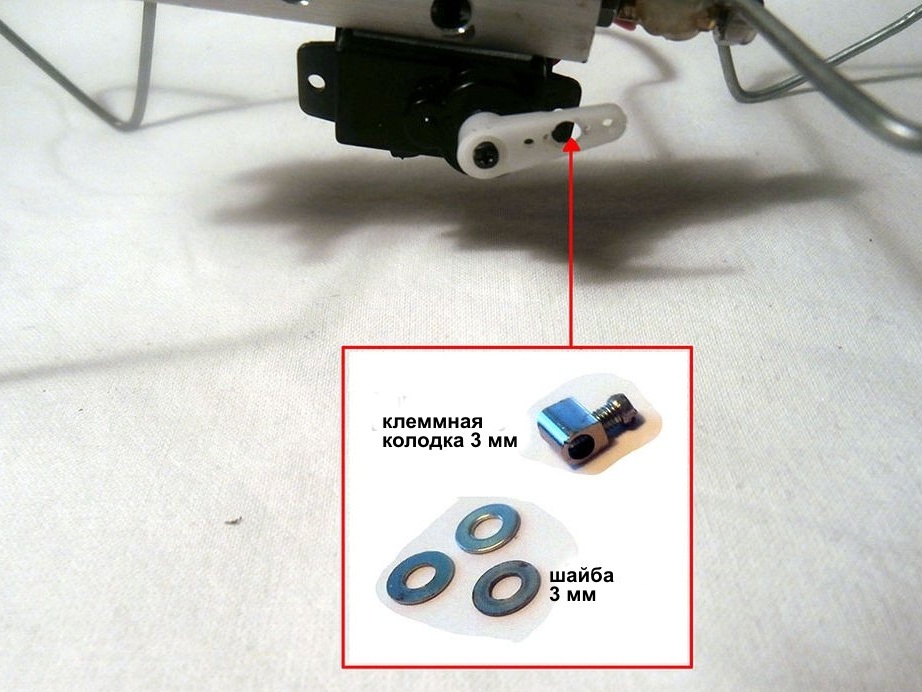
(2x) ακροδέκτες (3 mm)
(1x) ακροδεκτών (4 mm)
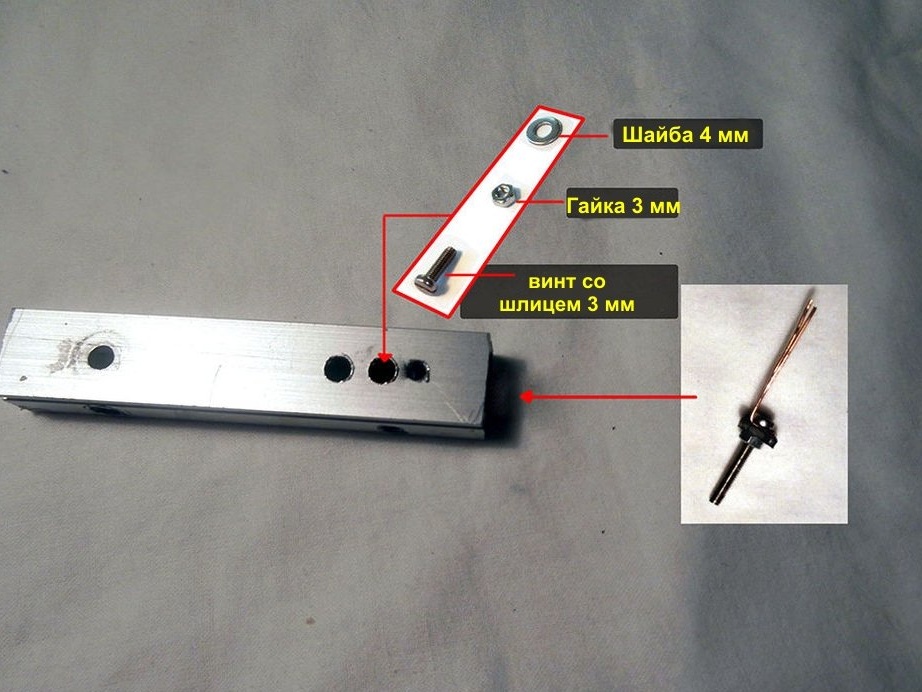
(1Χ) Χρησιμοποιημένο μπλοκ προφίλ αλουμινίου
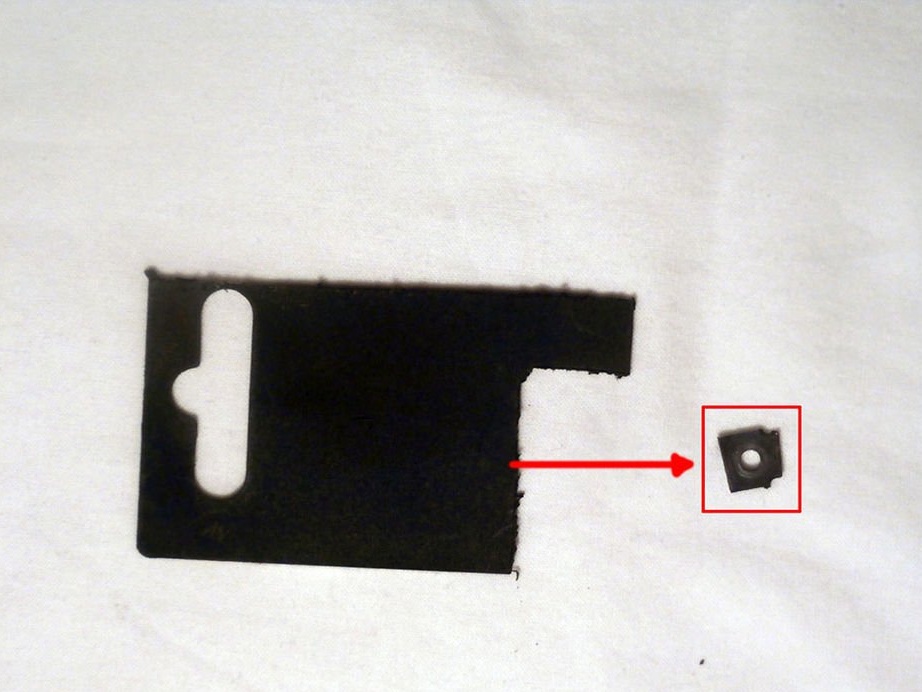
(1Χ) πλαστικό
Χαλύβδινο σύρμα (2 mm)
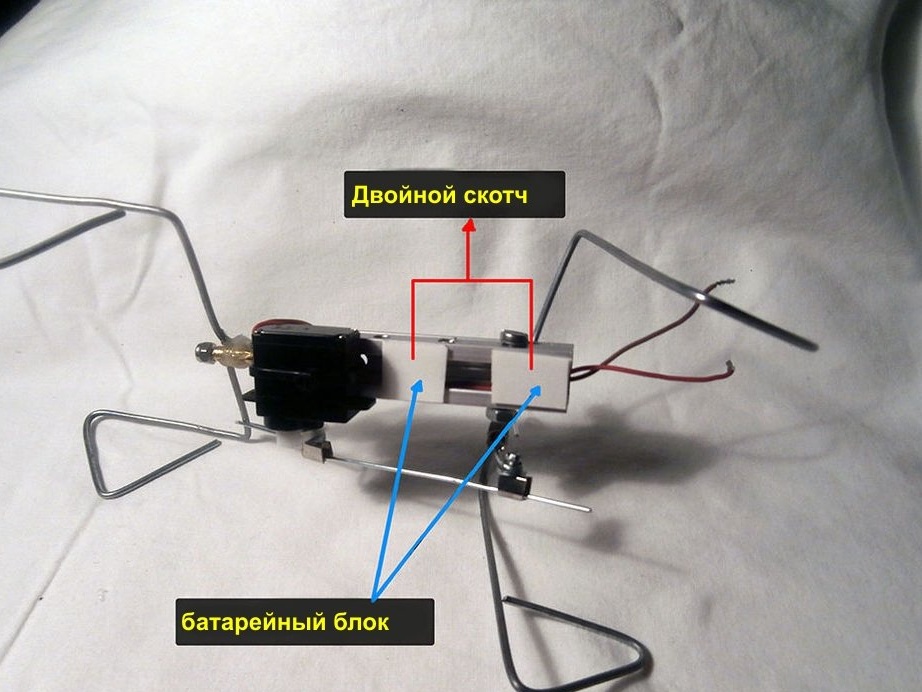
Διπλή κολλητική ταινία
Ορείχαλκος σωλήνας
(1Χ) μικρό σφιγκτήρα
(1X) μπαταρία (2 x AAA)
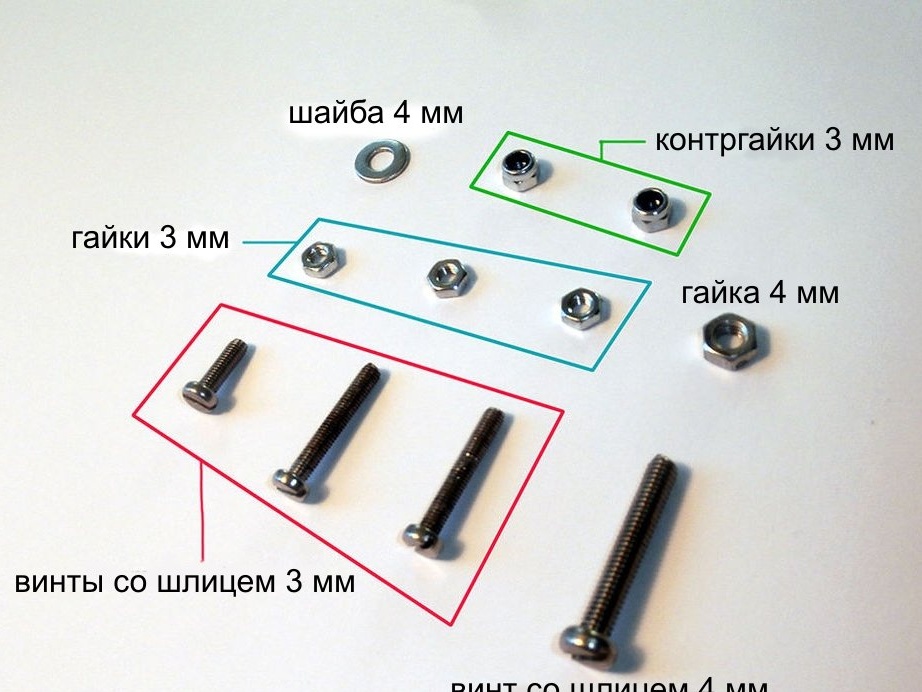
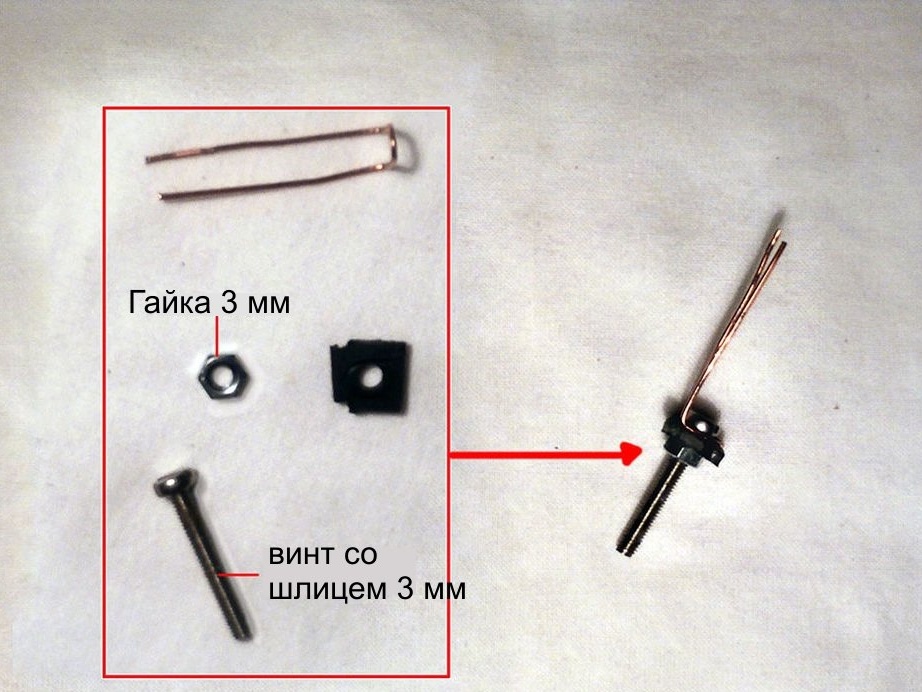
(2Χ) ασφαλιστικά παξιμάδια (3 mm)
(3Χ) και βίδες (3 mm)
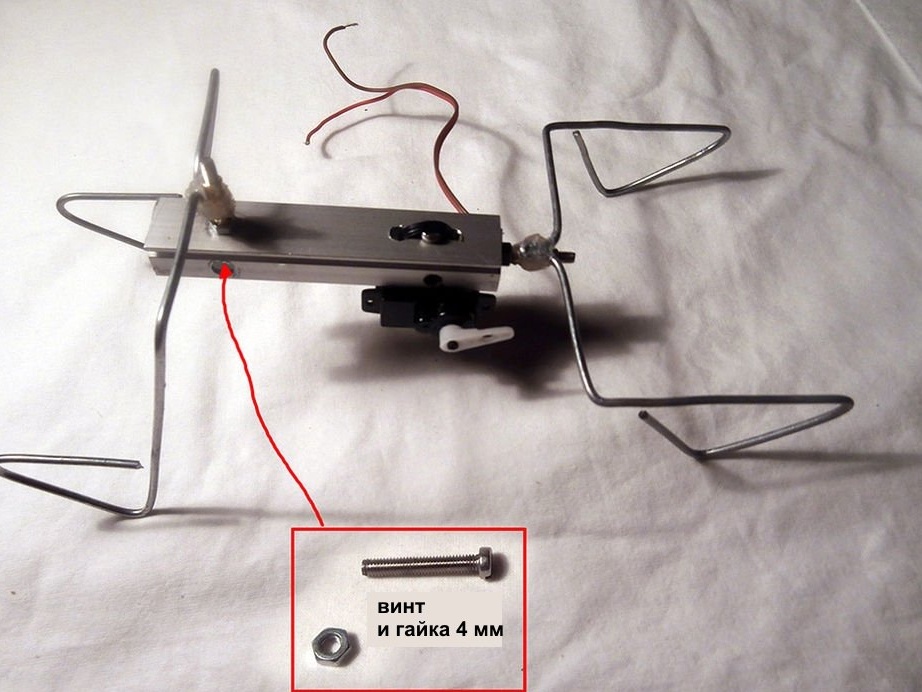
(1x) παξιμάδια και βίδες (4 mm)
(5χ) ροδέλα (3mm)
(1χ) ροδέλα (4mm)
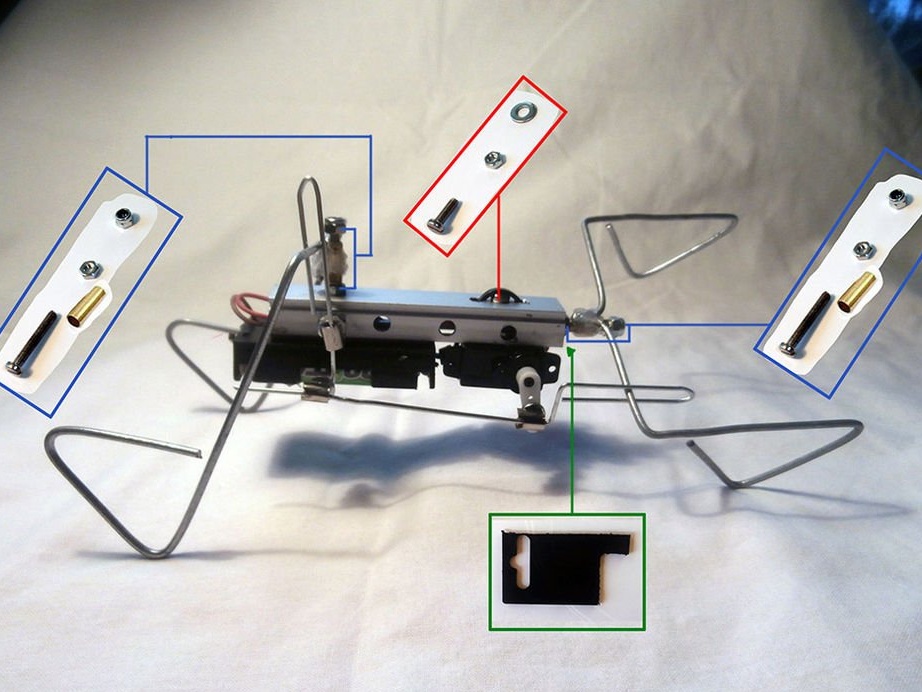
Βήμα 3: Συναρμολόγηση εξαρτημάτων
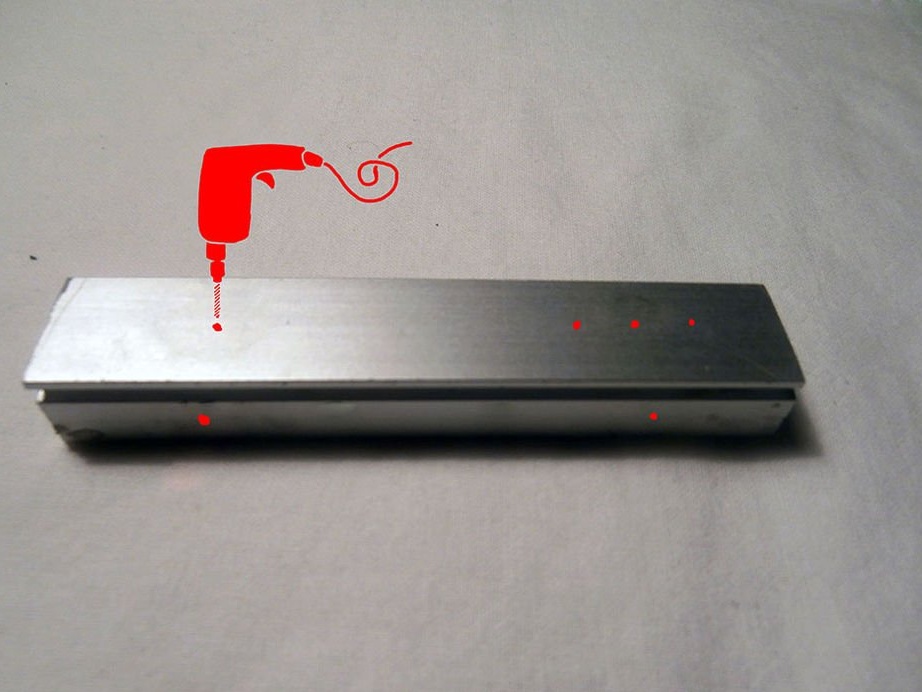
Βήμα 4: Εργαλεία
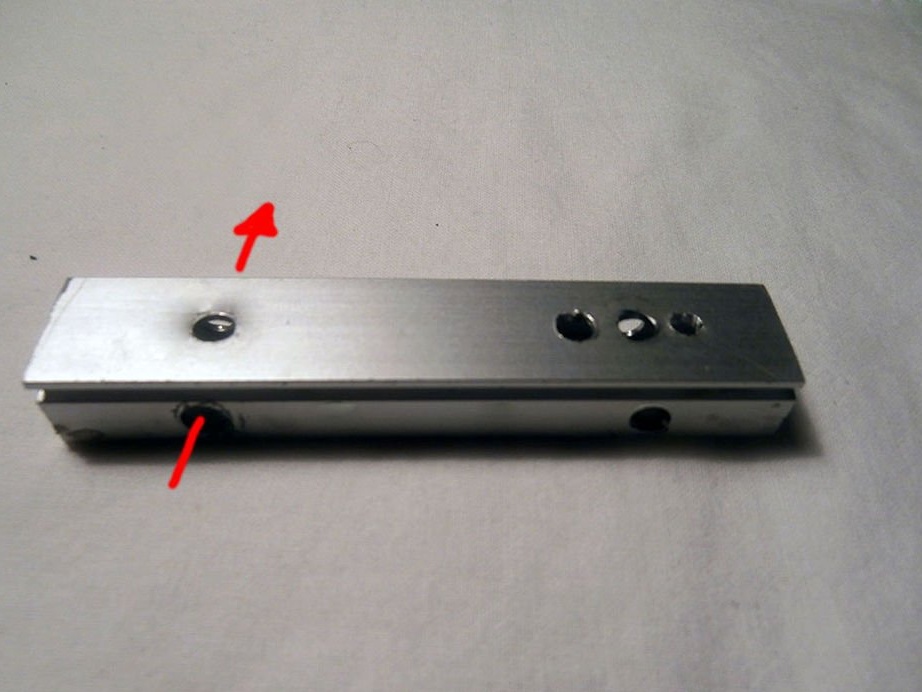
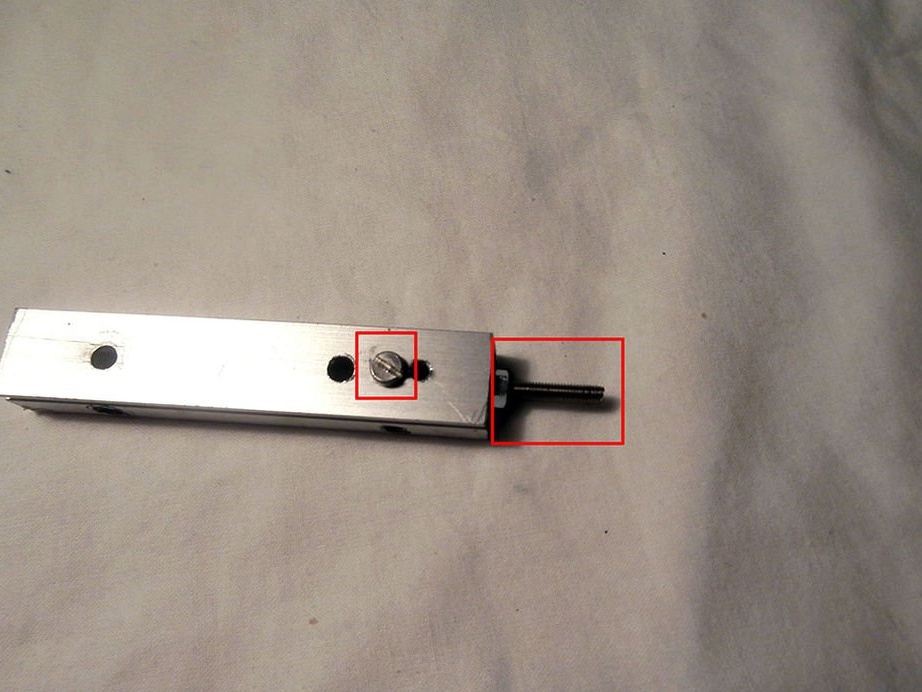
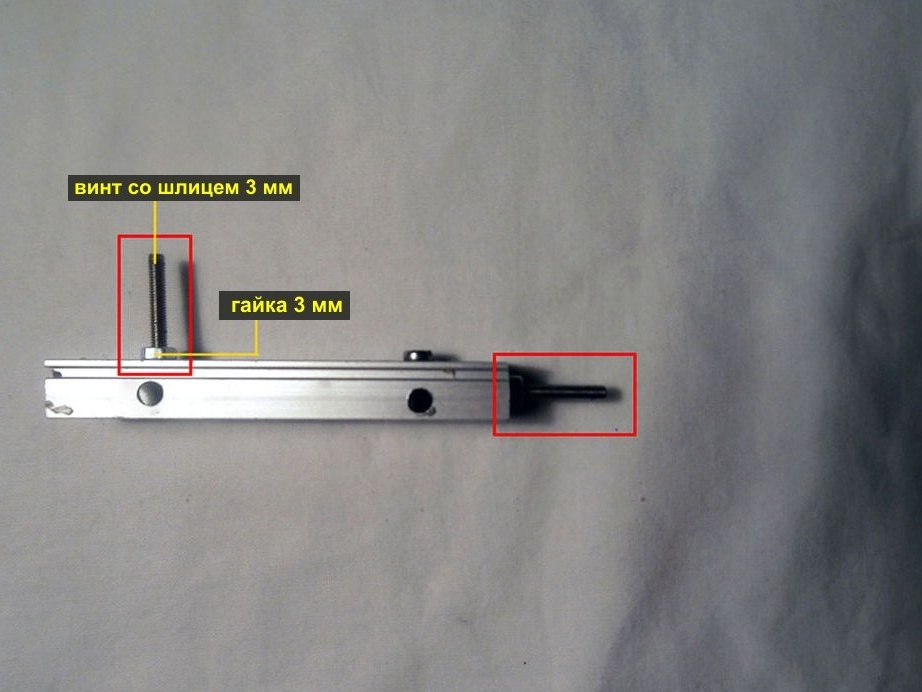
Βήμα 5: Στέγαση

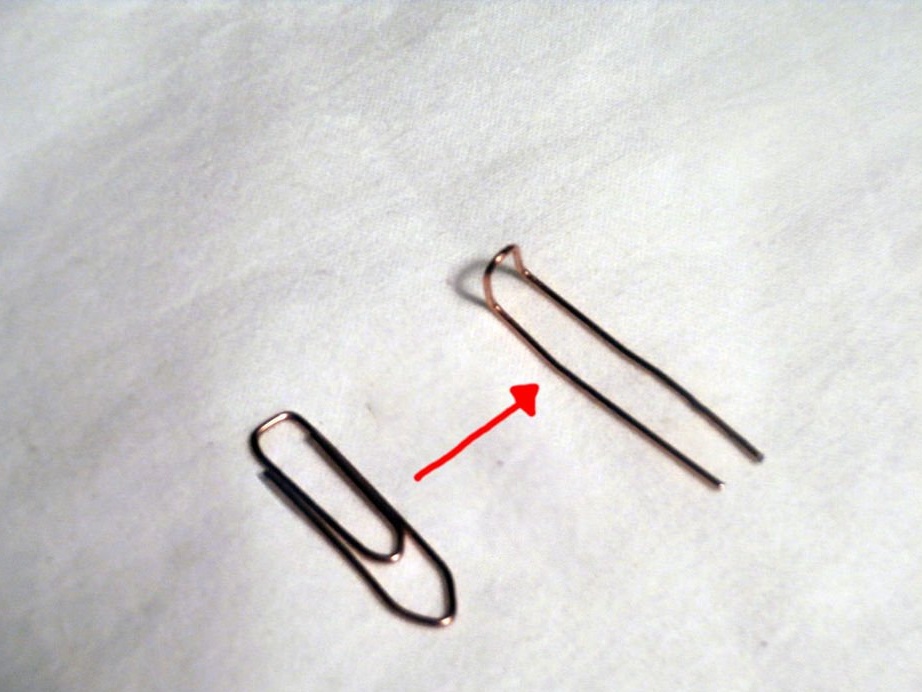

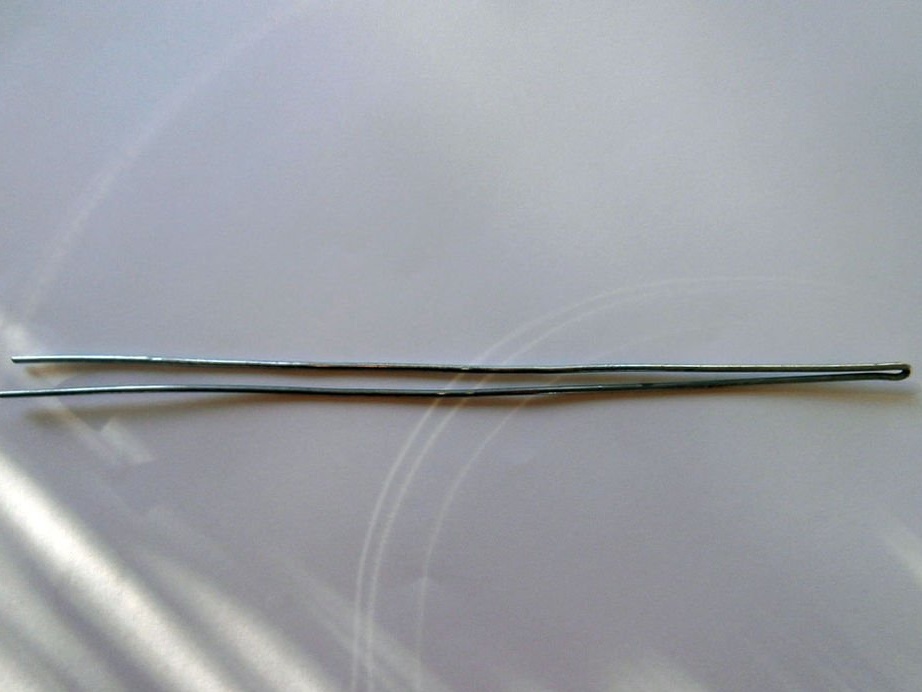
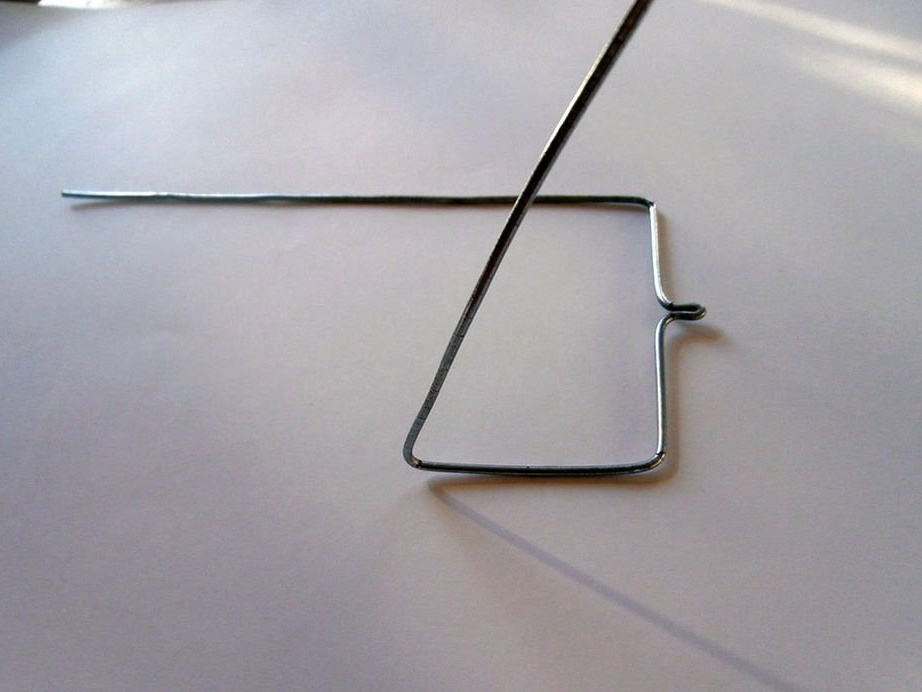
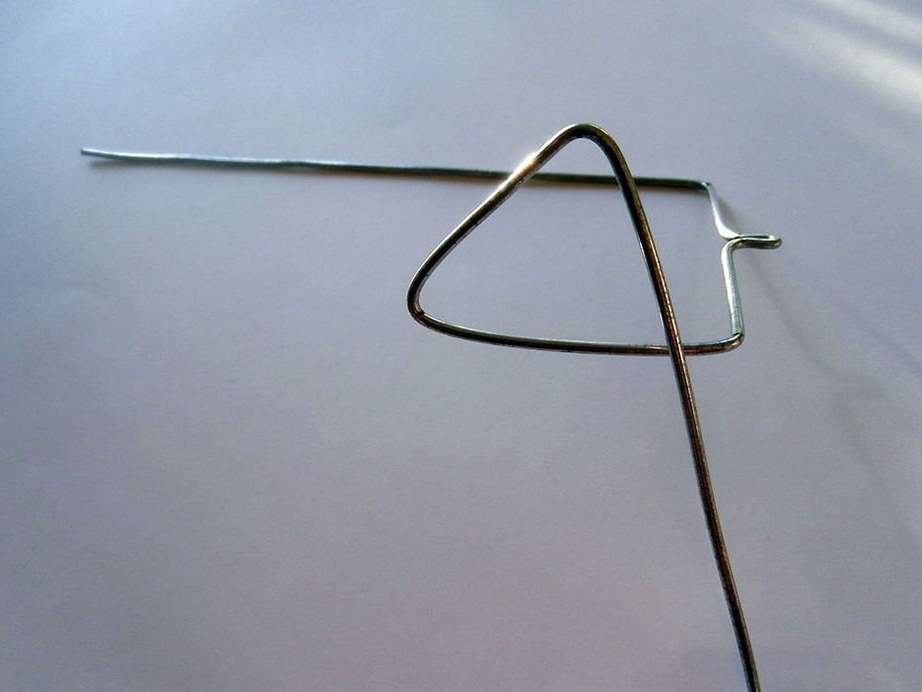
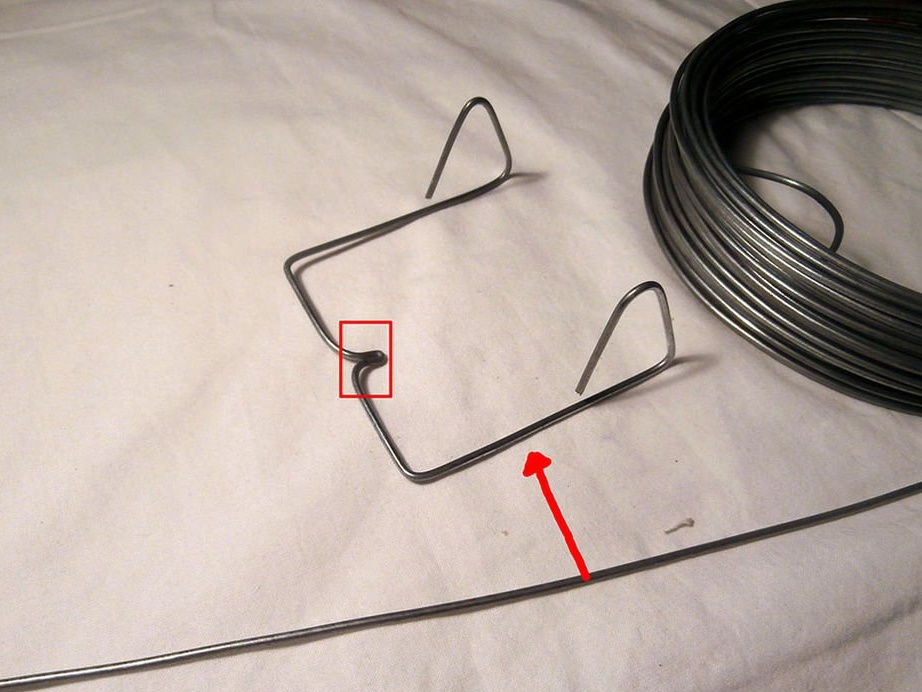
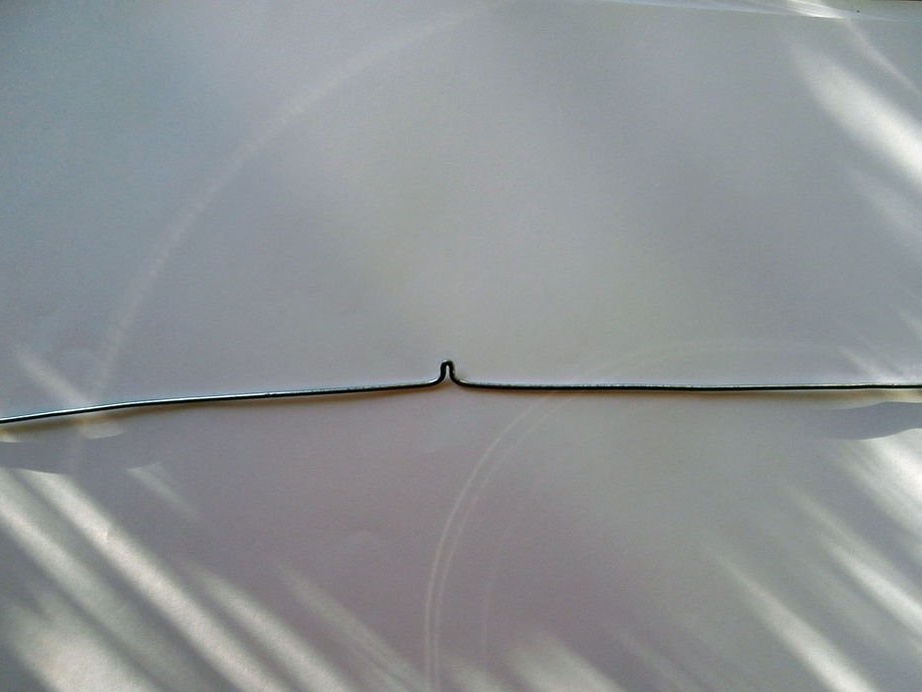
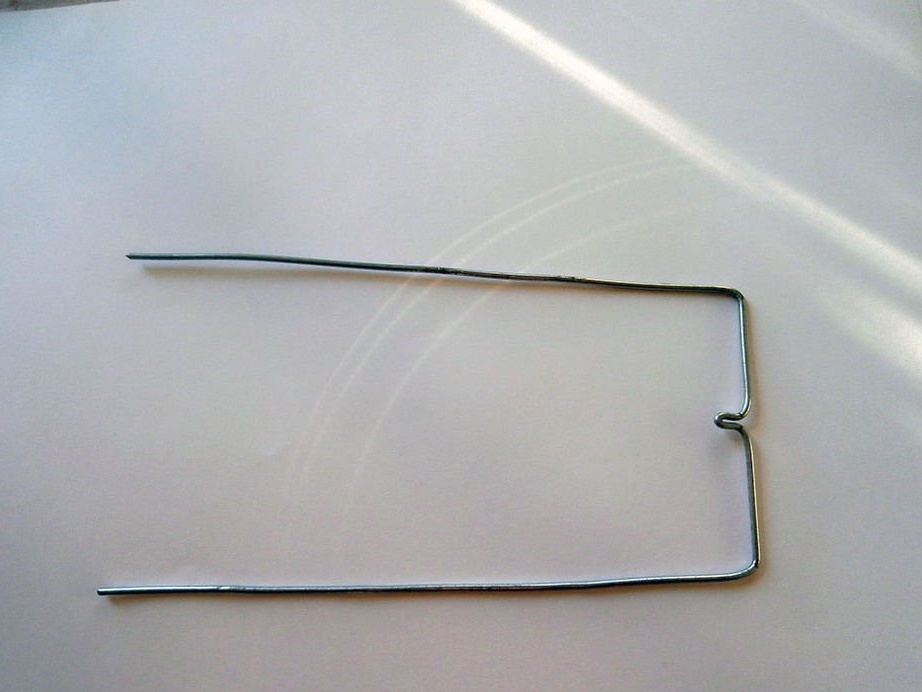
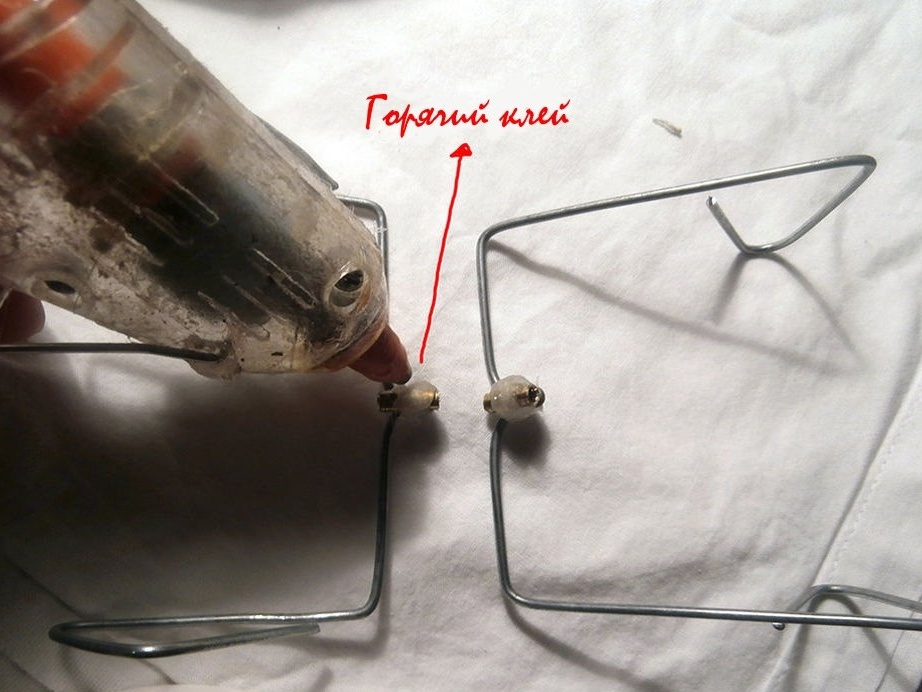
Βήμα 6: Μπροστινά πόδια
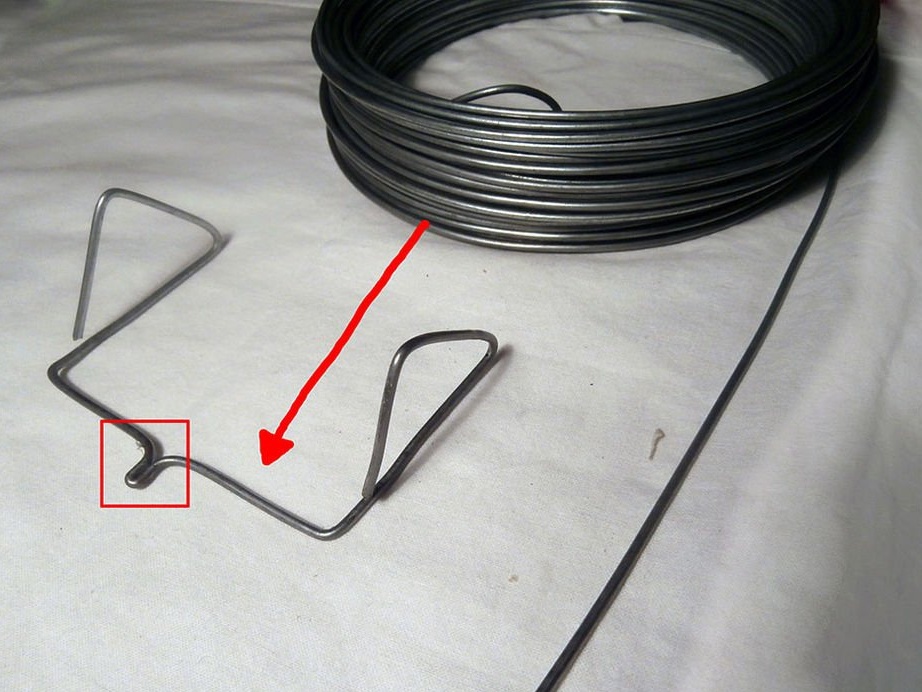
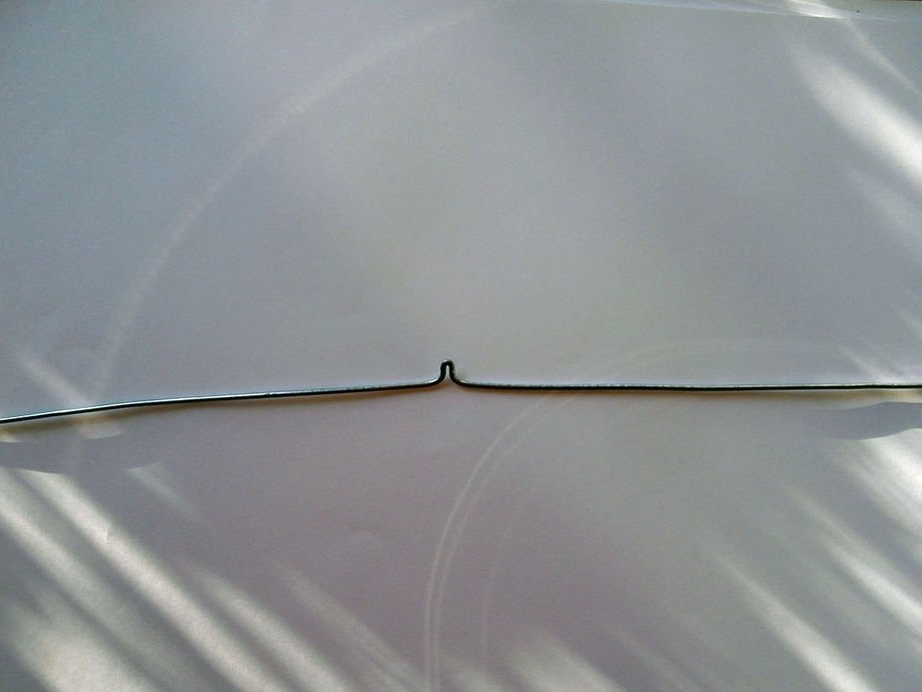
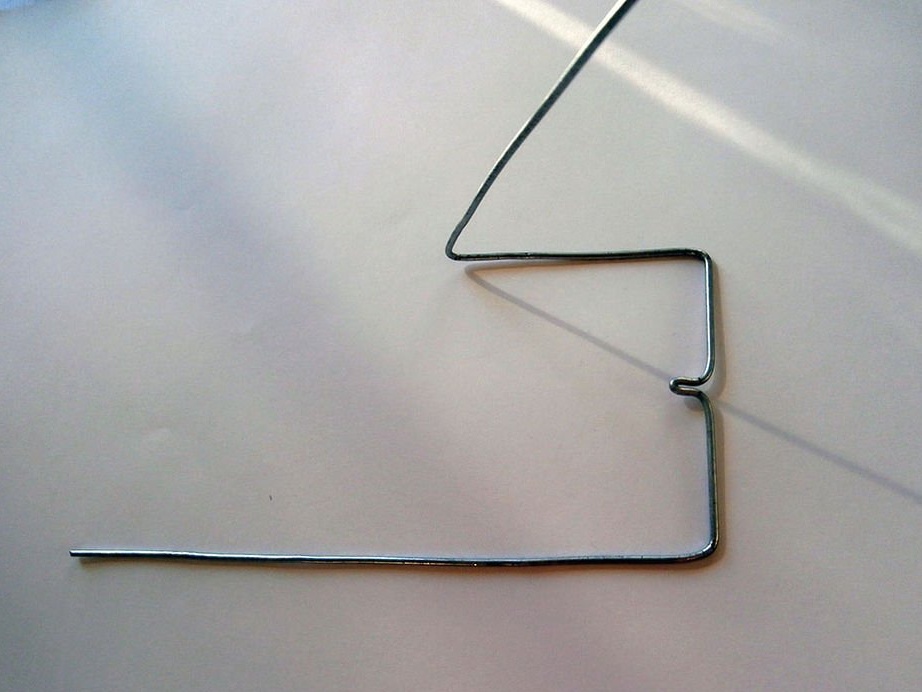
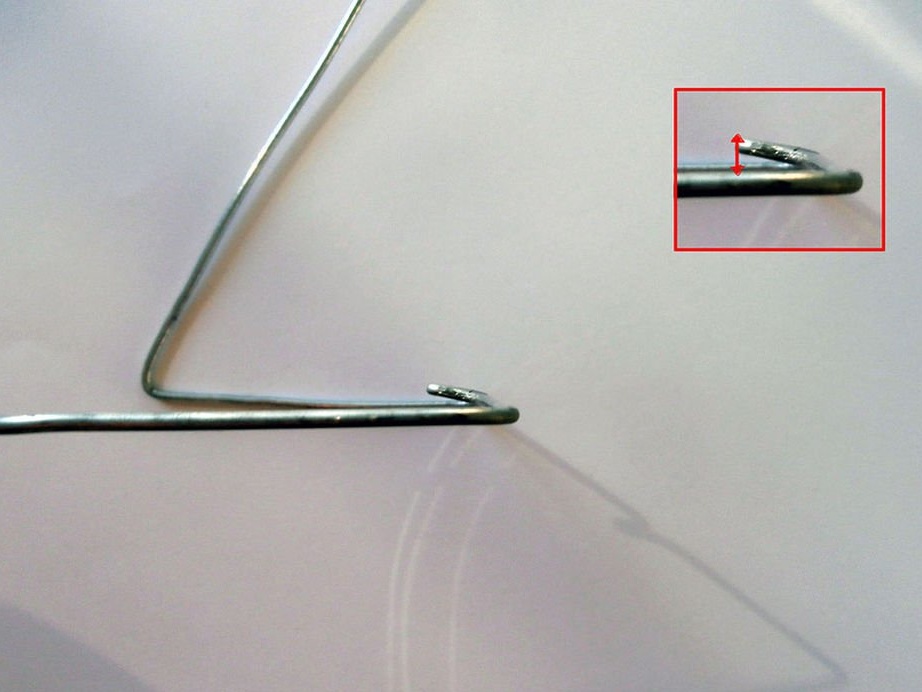
Βήμα 7: Πίσω πόδια
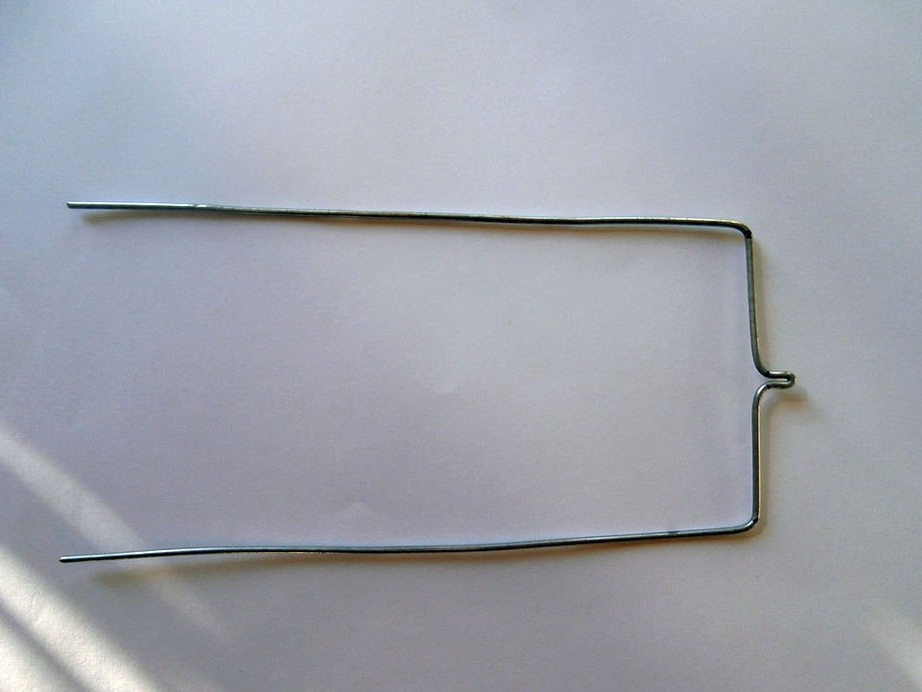
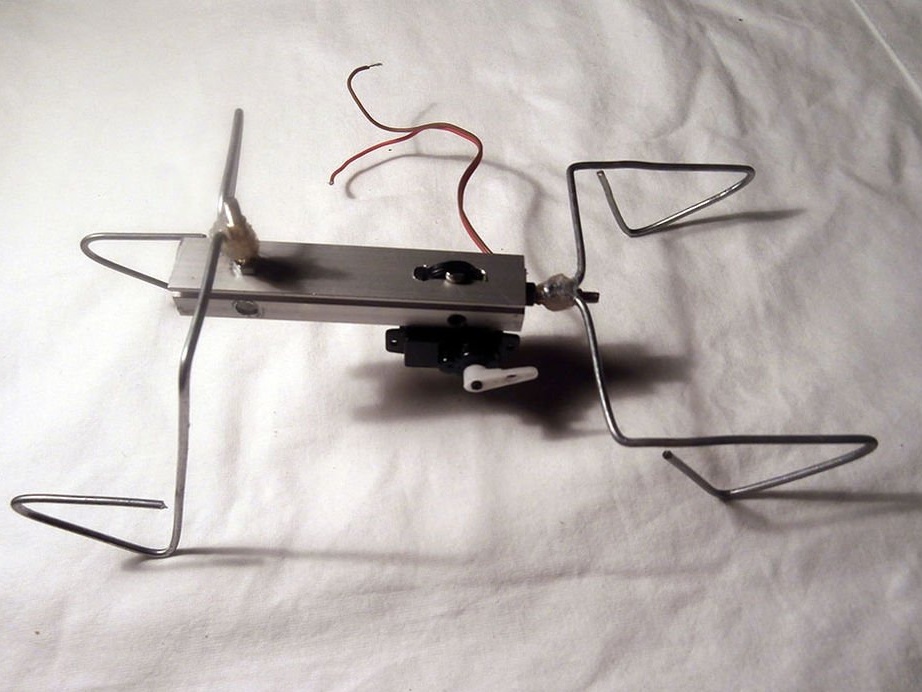
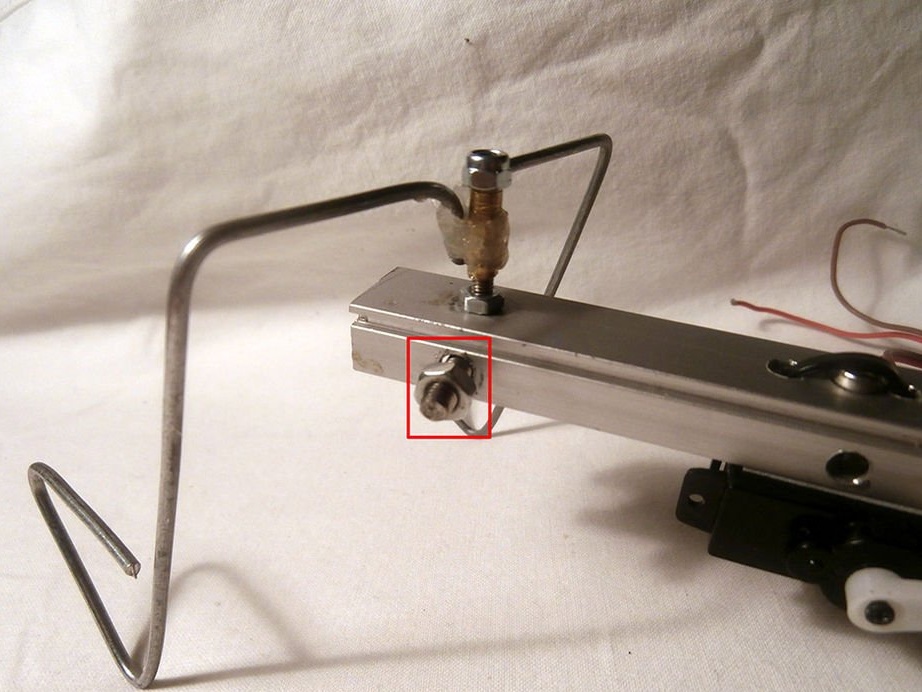
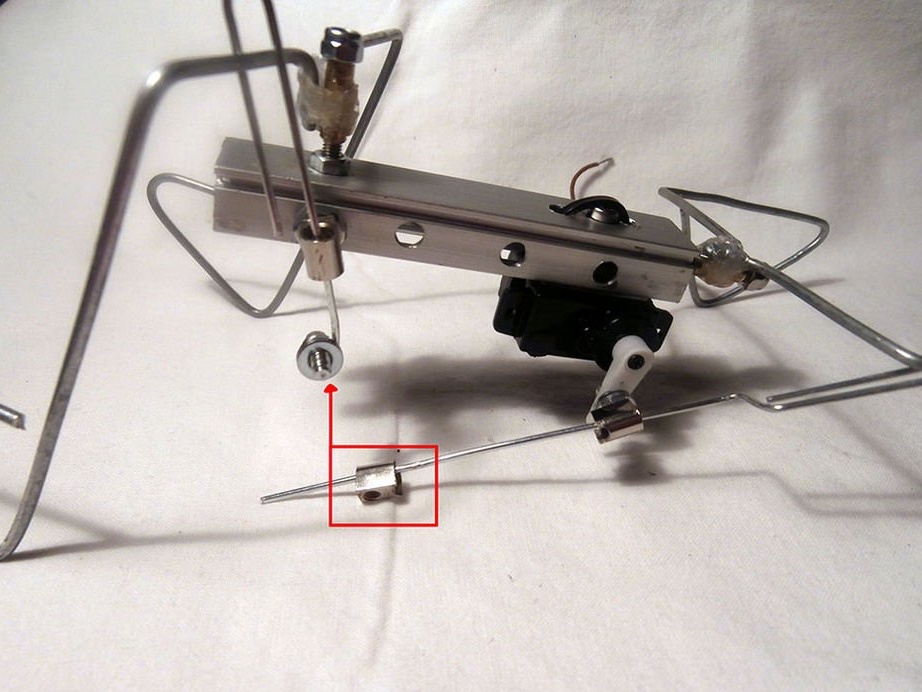
Βήμα 8: Τοποθέτηση των ποδιών
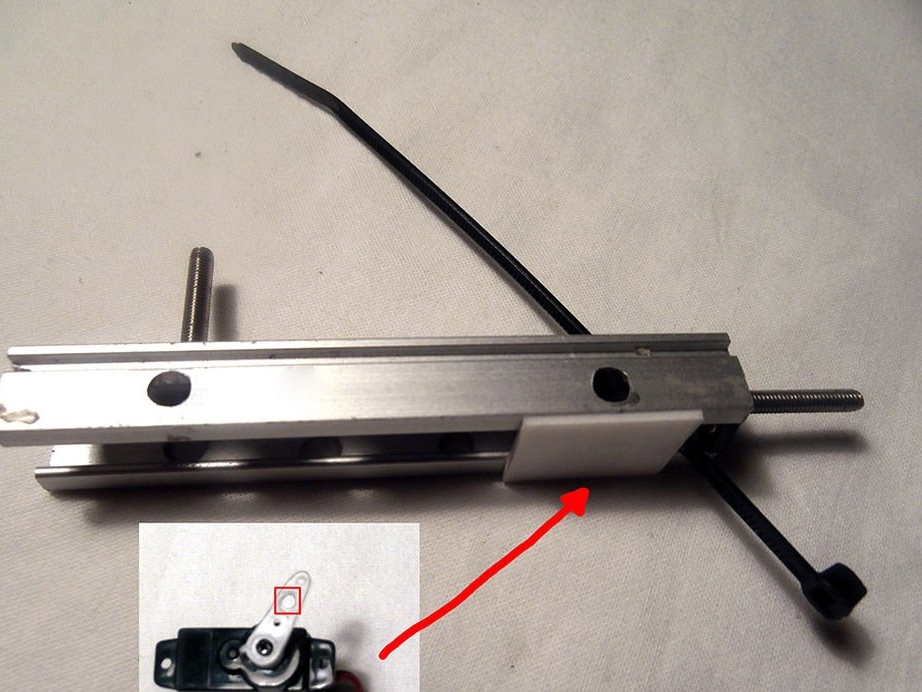
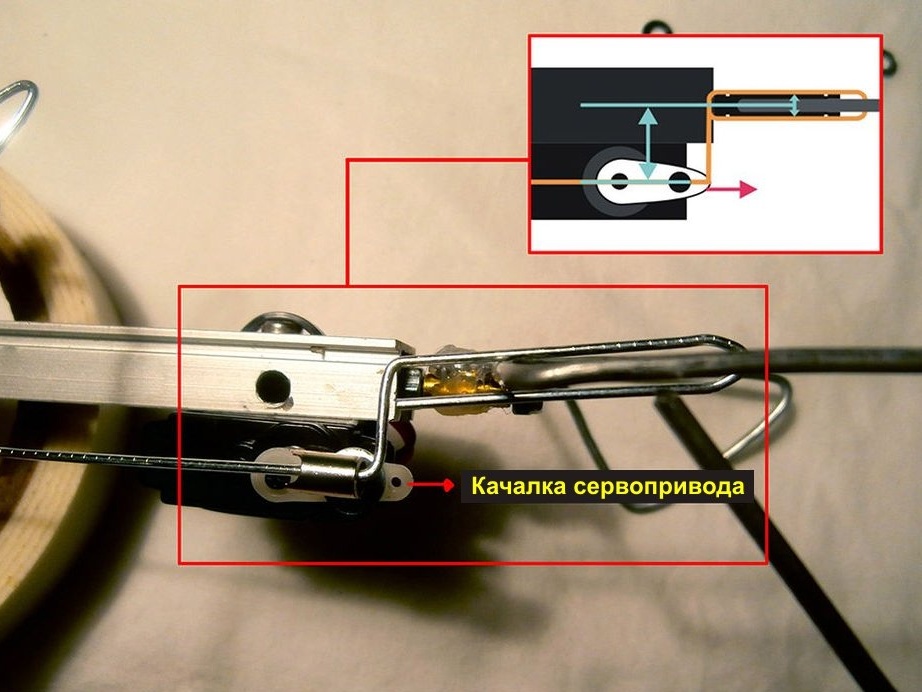
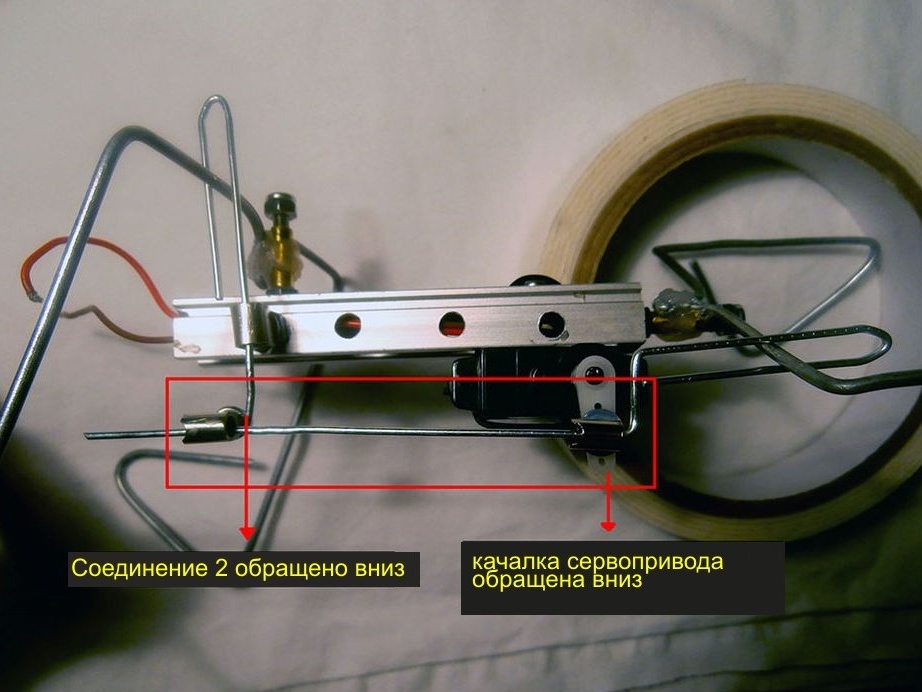
Βήμα 9: Συμπλέκτης
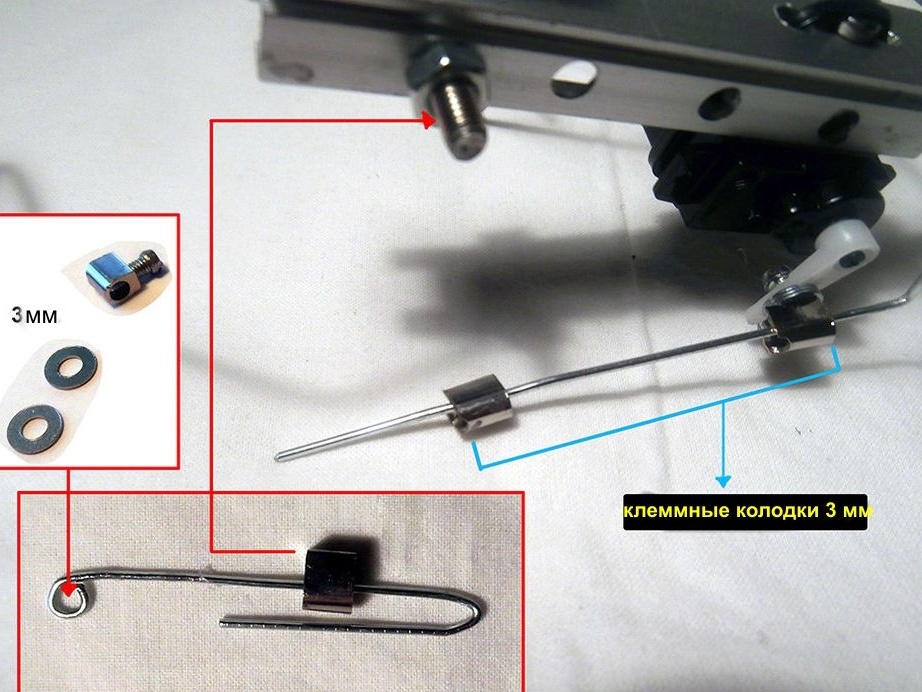
Βήμα 10: Σύνδεση συμπλέκτη
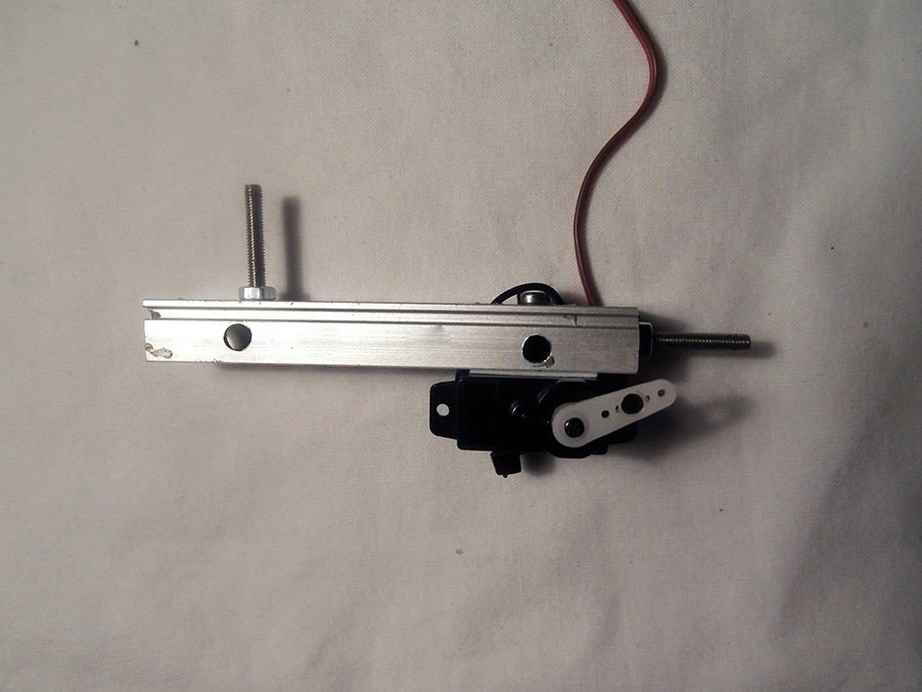
Βήμα 11: οι τελικές πινελιές
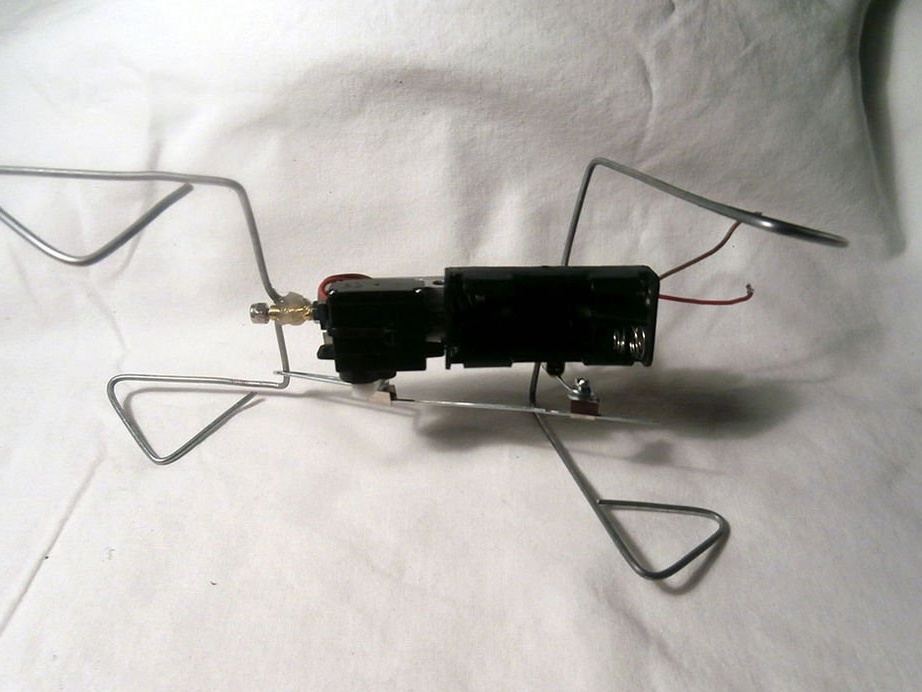
Στο τέλος, απλά συνδέστε το σέρβο και τις μπαταρίες, και το ρομπότ Η κουκουβάγια θα ξεκινήσει ένα ταξίδι στο σπίτι σας :)