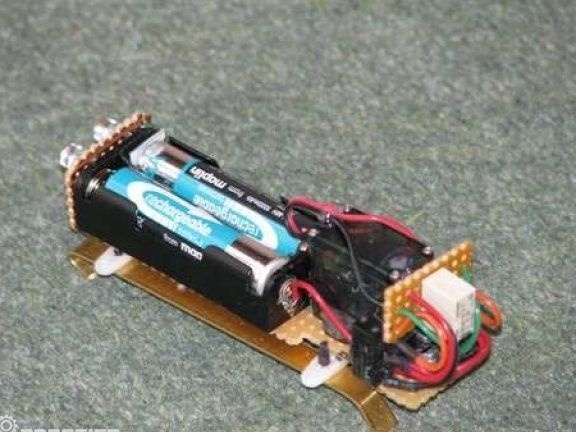
Το Carwalk Crawler είναι ένα μικρό ρομπότ που ανήκει στην κλάση BEAM. Τέτοιες ρομπότ περιλαμβάνουν άμεσα δύο στοιχεία όπως η αισθητική, η βιολογία, ηλεκτρονικά και της μηχανικής. Χάρη σε αυτή την προσέγγιση, τέτοια ρομπότ μιμούνται ζωντανά πλάσματα όσο το δυνατόν περισσότερο, μερικές φορές φαίνεται ότι είναι σε θέση να σκέφτονται.
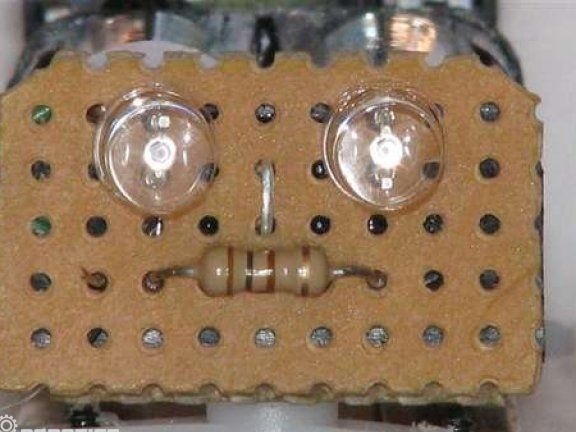
Ως εγκέφαλος για τέτοιου είδους ρομπότ οι αισθητήρες και οι διακόπτες χρησιμοποιούνται και κινούνται σπιτικό λόγω του σερβοκινητήρα. Οι μπαταρίες ΑΑΑ χρησιμοποιούνται ως ισχύς. Δεδομένου ότι τα μάτια που καίγονται έντονα, εγκαθίστανται δύο λυχνίες LED.
Υλικά και εργαλεία για την κατασκευή:
- ταινία ορείχαλκου μεγέθους 1/32 "x 1/4" x 8 ",
- δύο τεμάχια λωρίδων χαλκού.
- Μ2 παξιμάδια και βότσες.
- σερβοκινητήρα (Micro RC (7,5 g)),
- δύο μικροδιακόπτες (μπορούν να ληφθούν από παλιούς δίσκους).
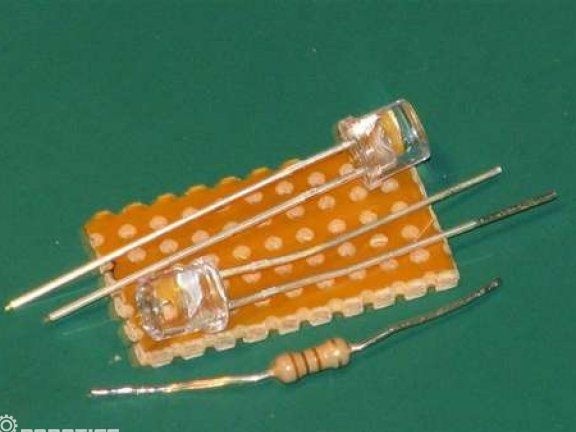
- δύο λυχνίες LED (το καλύτερο είναι να χρησιμοποιείτε κόκκινο, επειδή το λευκό ή μπλε σε αυτή την περίπτωση μπορεί να λειτουργήσει).
- μία αντίσταση 100R (αν τα LED είναι κίτρινα ή πράσινα, τότε 47R).
- δύο μπαταρίες ΑΑΑ και μια θήκη για αυτούς,
- λεπτή καλωδίωση.




Διαδικασία κατασκευής:
Πρώτο βήμα. Μεταβολή του σερβοκινητήρα
Ο σερβοκινητήρας έχει σχεδιαστεί με τέτοιο τρόπο ώστε κατά τη λειτουργία να κάνει παρορμητικές κινήσεις. Σε αυτή την περίπτωση, πρέπει να επανατοποθετηθεί έτσι ώστε να λειτουργεί σε περιστροφή. Υπάρχουν δύο τρόποι να το κάνετε αυτό.
Στην πρώτη περίπτωση, μπορείτε να εξοικονομήσετε ταχύτητα και κατεύθυνση από τον έλεγχο του κινητήρα, καθώς και ηλεκτρονικά ελέγχου. Η συσκευή θα εξακολουθεί να χρειάζεται εισερχόμενους παλμούς για να λειτουργήσει.
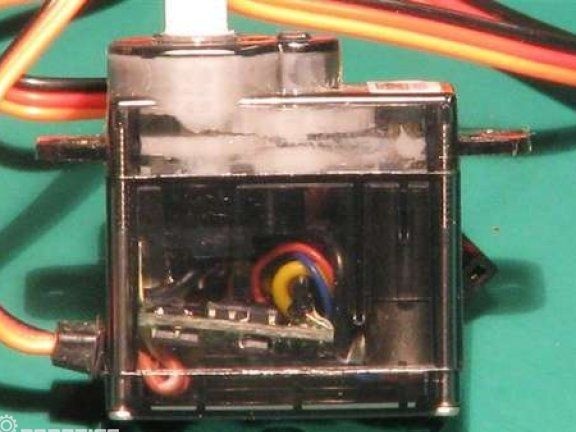
Ο συγγραφέας πήγε στην αντίθετη κατεύθυνση. Είναι απαραίτητο να κόψετε το στοιχείο σταματήματος των γραναζιών. Στη συνέχεια, τα γρανάζια πρέπει να παρατάσσονται, θα είναι δύσκολο να τα συναρμολογήσετε αν η ακολουθία χάσει. Κατά την αποσυναρμολόγηση, η επιφάνεια του σερβοκινητήρα πρέπει να λιπαίνεται με γράσο σιλικόνης.
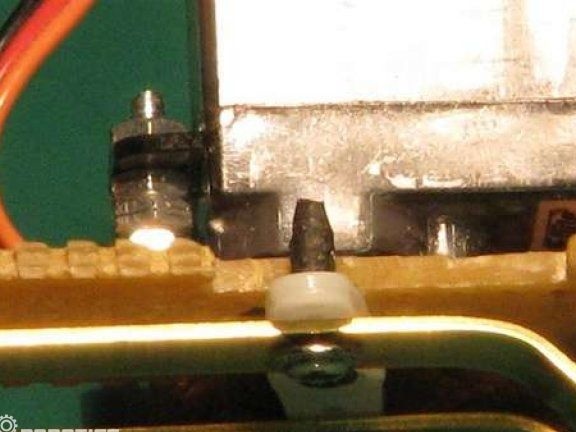
Η εικόνα δείχνει τον μηχανισμό ελέγχου RSV που πρέπει να μετακινηθεί.

Μετά την αφαίρεση της πλακέτας, το κόκκινο καλώδιο πρέπει να αλλάξει ακριβώς στο κόκκινο σύρμα του κινητήρα. Τα καλώδια πρέπει να τυλίγονται προσεκτικά με ηλεκτρική ταινία για να αποφεύγεται ο βραχυκύκλωμα.

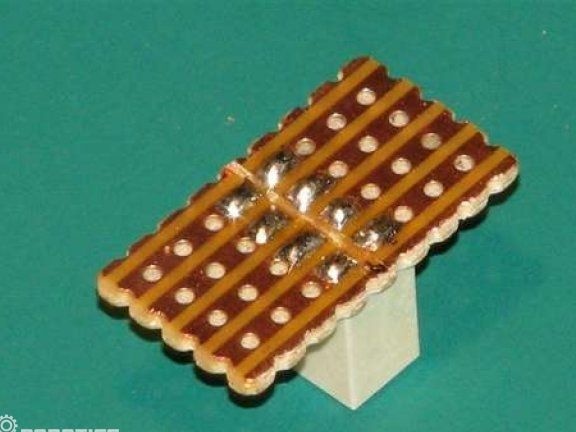
Βήμα δεύτερο Δημιουργήστε το μηχανικό τμήμα
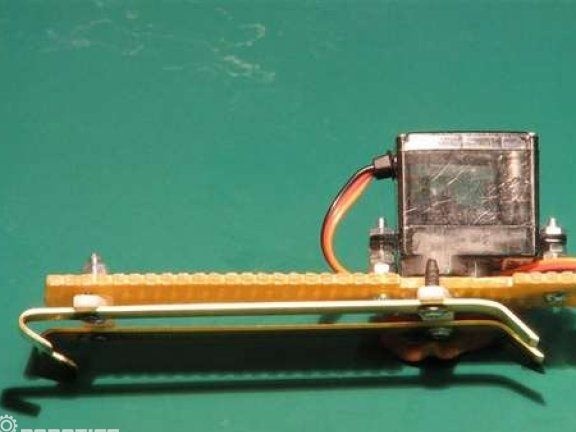
Στην πλάκα εργασίας, πρέπει να τρυπήσετε αρκετές τρύπες και στη συνέχεια να εγκαταστήσετε το ρελέ στο πίσω μέρος της μπαταρίας.Για την τοποθέτηση του σερβομηχανισμού χρησιμοποιούνται βίδες 2 mm.
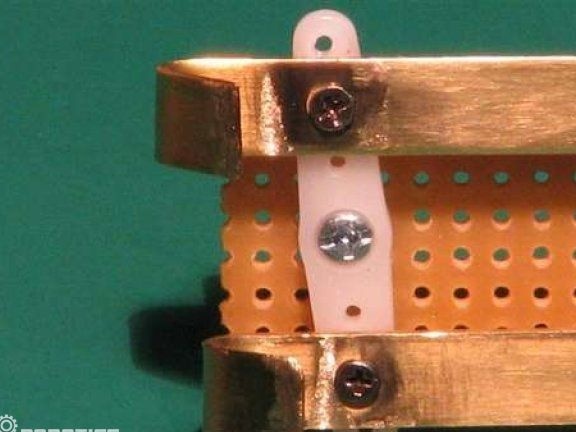
Τα πόδια του ρομπότ είναι κατασκευασμένα από συμπαγή χάλκινες πλάκες, γι 'αυτό αρχικά κόβονται σε κομμάτια δεδομένου μήκους και κάνουν κάμψεις. Χάρη σε αυτές τις εκτροπές, το ρομπότ θα προσκολληθεί στο δρόμο και θα σέρνει. Στερεώστε την πλάκα με μικρές βίδες.


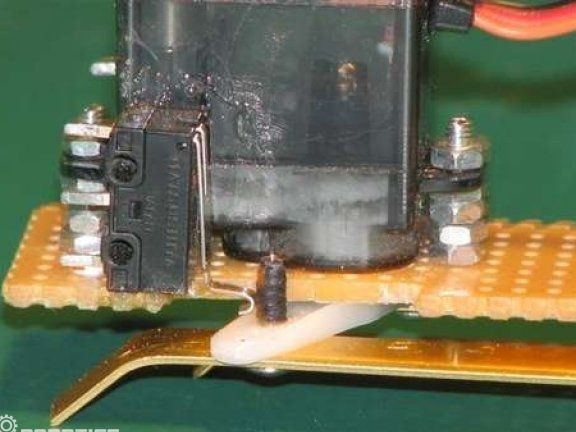
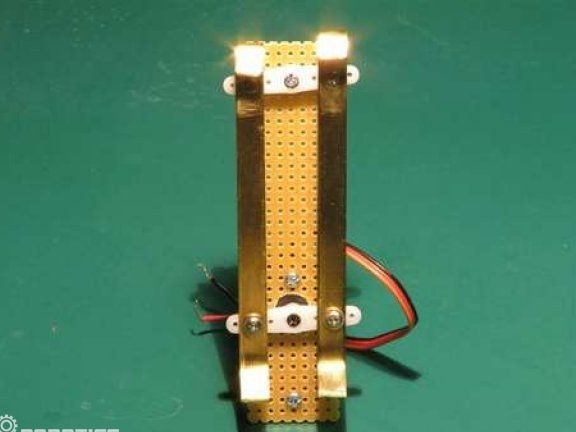
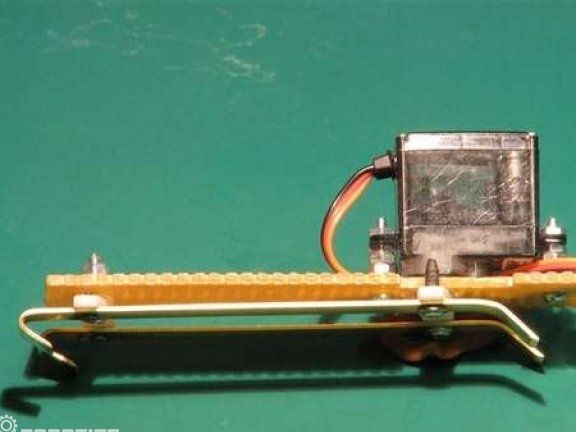
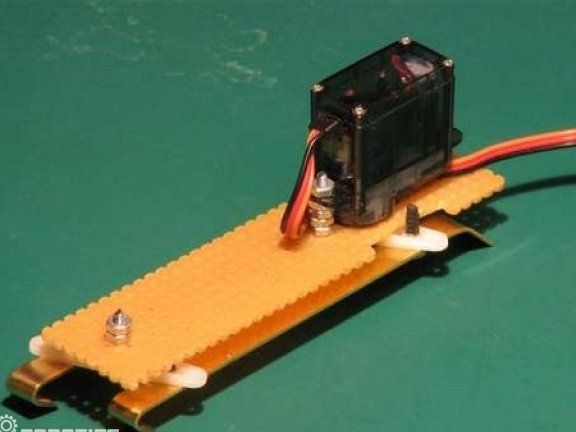
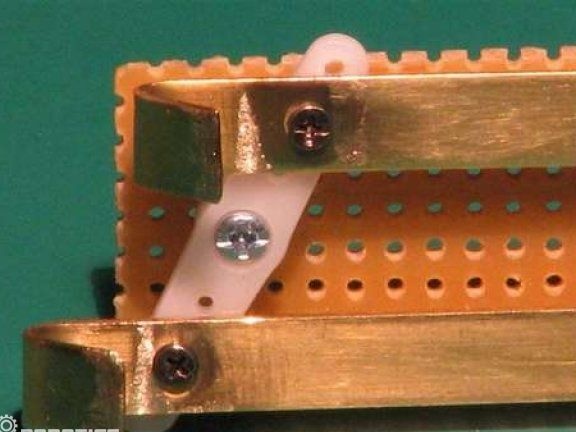
Για τον έλεγχο των ποδιών πρέπει να ρυθμίσετε τους διακόπτες. Συνδέονται με τον σερβοκινητήρα με κόλλα.
Βήμα τρίτο Ηλεκτρονικό κύκλωμα ρομπότ
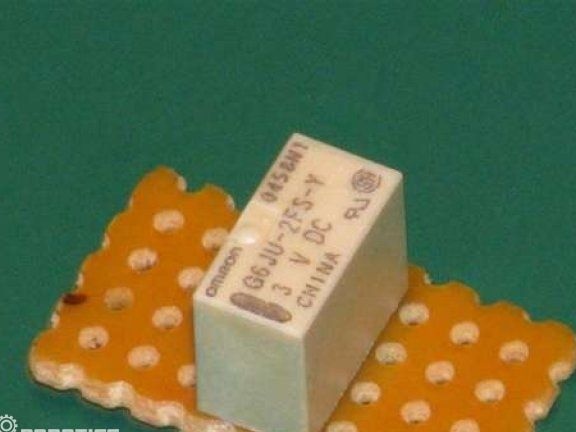
Το κύριο συστατικό στο έργο του σπιτιού μπορεί να θεωρηθεί ένα ρελέ-μάνταλο, το οποίο θα λειτουργήσει όταν αποσυνδεθεί από το πηνίο. Το ρελέ θα αλλάξει κίνηση, αλλά θα παραμείνει σε ένα μέρος μέχρι την επόμενη στροφή.
Οι παλμοί στα πηνία θα προέρχονται από δύο μικροδιακόπτες, θα ενεργοποιηθούν όταν το ρελέ της κεραίας θα βγει στο διακόπτη.

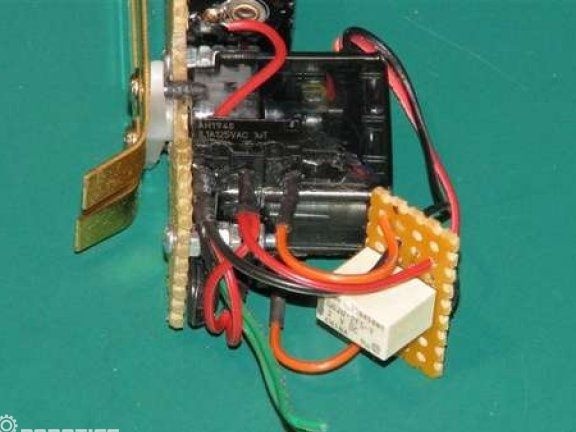
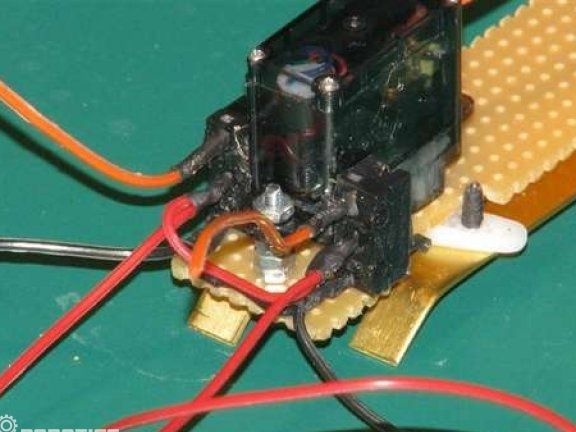
Βήμα τέσσερα Συναρμολόγηση του ηλεκτρονικού μέρους
Ο ηλεκτρονόμος συναρμολογείται σε ένα θραύσμα σε μια πλάκα, οπότε είναι πιο εύκολο να συνδεθεί. Η όλη διαδικασία σύνδεσης ηλεκτρονικών εμφανίζεται στη φωτογραφία.





Αυτό είναι όλο, τώρα το ρομπότ είναι έτοιμο. Το καλύτερο από όλα, θα φανεί στον εαυτό του στην επιφάνεια του χαλιού, καθώς έχει σχεδιαστεί ειδικά για τέτοιους χώρους. Πρώτον, το ρομπότ θα πρέπει να ανάβει τα LED και στη συνέχεια θα σέρνει αργά κατά μήκος του δαπέδου.