

Αυτό το έργο είναι ιδανικό για όσους συχνά ξεχνούν να τρώνε τα ψάρια τους. Ή απλά δεν είναι πάντα σε θέση να το κάνει έγκαιρα. Αφού κάνατε ένα τέτοιο τροφοδότη, δεν μπορείτε να ανησυχείτε για τα μικρά κατοικίδια ζώα σας, και ακόμη και να αισθανθείτε ελεύθεροι να φύγετε για λίγο.
Υλικά:
- Arduino UNO ή άλλου συμβατού μικροϋπολογιστή.
- Τροφοδοτικό 9V ή 12V.
- Ένας βηματικός κινητήρας 5V από μια παλιά δισκέτα.
- Ομαλή κατάτμηση (χρησιμοποιείται από το κιβώτιο εργαλείων).
- Μεταγωγή μοχλού από σταθερό τηλέφωνο.
- Η θήκη από τον σκληρό δίσκο (χρησιμεύει ως δοχείο για ζωοτροφές).
- Ομαλή πλάκα (π.χ. πλαστικό χάρακα).
- Τρίποδο από κάμερα CCTV.
- Αντίσταση 10 kOhm.
- Χρονοδιακόπτης μηχανικού AC.
Πρώτο βήμα. Συναρμολόγηση περιβλήματος:
Το σχέδιο συναρμολόγησης παρουσιάζεται στο πρώτο σχήμα. Μια οπή κόβεται στη μία πλευρά του περιβλήματος του σκληρού δίσκου. Για αυτό το μέρος του τροφοδότη, μπορείτε να χρησιμοποιήσετε ακόμη και ένα πλαστικό μπουκάλι, ωστόσο, θα χρειαστεί να βρείτε ένα στήριγμα για να το κρατήσετε ανάποδα.
Ο συγγραφέας χρησιμοποιεί ένα τρίποδο από μια κάμερα CCTV, αφού έχει το ιδανικό ύψος για την εγκατάσταση ενός βηματικού κινητήρα κάτω από αυτό. Το μόνο που παρέμεινε ήταν να τρυπήσει μια τρύπα στο περίβλημα.
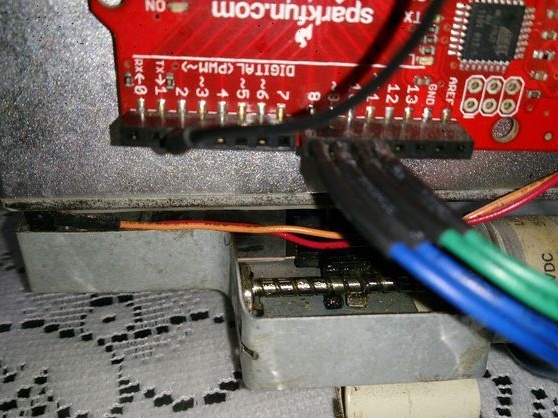
Για να μετακινήσετε το κάλυμμα, χρησιμοποιήθηκε ένας κινητήρας στάβλων 5V με μηχανισμό κίνησης που χρησιμοποιείται για τη μετακίνηση των φακών κίνησης. Ένα ομαλό διαμέρισμα από το κιβώτιο τοποθετήθηκε στην κορυφή του συγκρατητήρα φακών, κάτω από την οπή στην οποία πρέπει να βγουν τα σφαιρίδια τροφής. Για να γίνει αυτό, συνιστάται επίσης να χρησιμοποιήσετε ένα σπασμένο χάρακα. Αφήστε ένα χιλιοστό από το κάτω μέρος της γάστρας ώστε τα σφαιρίδια τροφής να μπορούν να περάσουν από το κλειστό καπάκι.


Βήμα δεύτερο Τροποποίηση του σώματος:
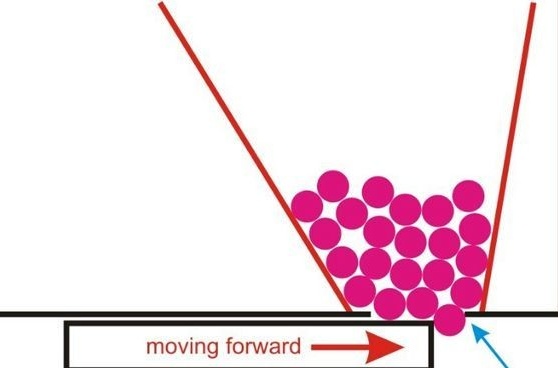
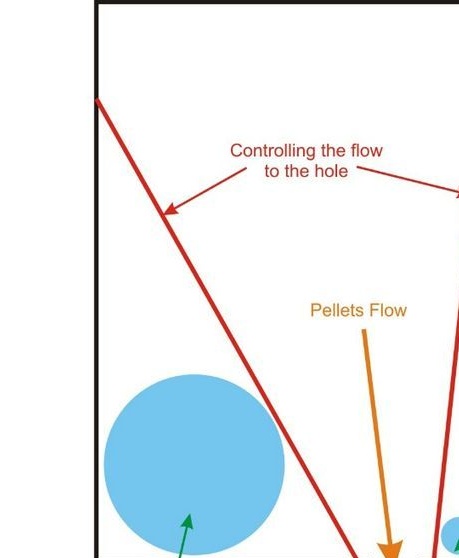
Το παρακάτω διάγραμμα δείχνει πώς πρέπει να περάσει σωστά η τροφοδοσία μέσω της οπής έτσι ώστε τα σφαιρίδια να μην παραμείνουν στις γωνίες εξόδου τροφοδοσίας.
Μετά από δύο ημέρες χρήσης, ο συγγραφέας συνειδητοποίησε ότι κάποια από τις ζωοτροφές ήταν κολλημένη, αλλά δεν βγήκε όπως είχε προβλεφθεί. Γι 'αυτό χρειαζόμασταν ένα χάρακα ή οποιαδήποτε ομαλή πλάκα που να ταιριάζει στο δοχείο και με τη μορφή του γράμματος V.

Βήμα τρίτο Ηλεκτρονικά μέρος του τροφοδότη:
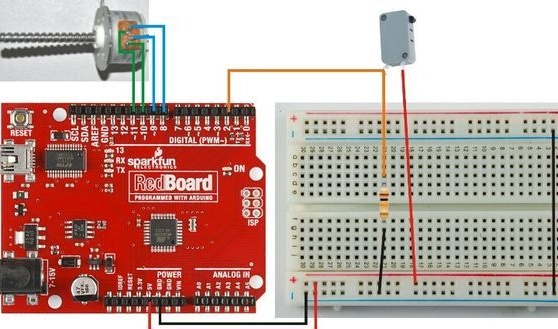
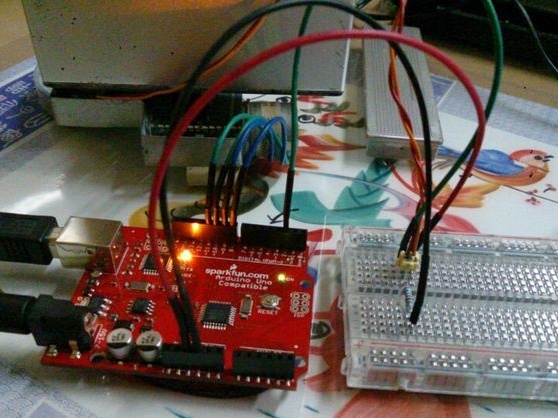
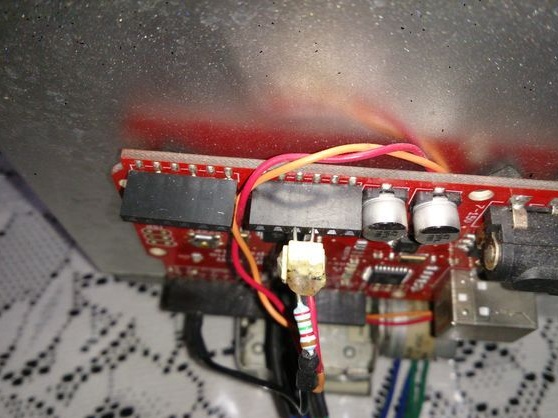
Ένας βηματικός κινητήρας, ένας αντιστάτης 10 kΩ και ένας διακόπτης είναι εγκατεστημένοι όπως φαίνεται στο παρακάτω διάγραμμα. Για να διευκολυνθεί η κατανόηση της λειτουργίας του κυκλώματος και των δοκιμών, χρησιμοποιείται ένα πιλοτήριο, στην τελική συναρμολόγηση λείπει (ένα παράδειγμα στην τελευταία φωτογραφία).
Τέσσερα καλώδια κινητήρα συνδέονται σε ψηφιακές ακίδες 8-11. Ένα πόδι του διακόπτη στην έξοδο ισχύος 5V. Το δεύτερο πόδι, με τη σειρά του, συνδέεται με το έδαφος χρησιμοποιώντας αντίσταση 10 kΩ και συνδέεται επίσης με τον ψηφιακό πείρο 2.
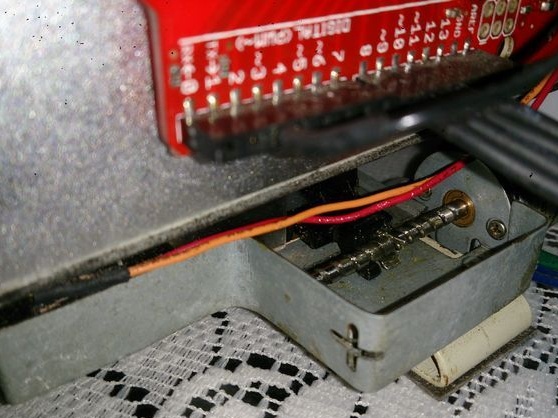
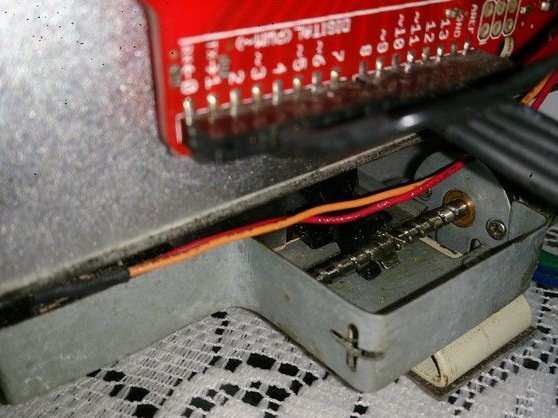
Ο διακόπτης τοποθετείται μπροστά από το κινητό κάλυμμα και το μεταλλικό τμήμα κάμπτεται, σχηματίζοντας έτσι ένα πώμα (κόκκινο και πορτοκαλί σύρμα στην τρίτη φωτογραφία). Όταν ο διακόπτης κινείται προς τα εμπρός και πιέζει το σταμάτημα, το Arduino θα καταχωρήσει μια τιμή ΥΨΗΛΗΣ και θα σταματήσει τον κινητήρα.
Η πλακέτα είναι τοποθετημένη στο πίσω μέρος της θήκης με ηλεκτρική ταινία και το βύσμα διαθέτει χρονοδιακόπτη στο πλάι της. Χρησιμοποιούνται για την εξισορρόπηση της θήκης έτσι ώστε να παραμένει στη σωστή θέση.
Δοκιμή εργασίας σπιτικό χωρίς δοχείο τροφίμων:
Το παρακάτω βίντεο δείχνει τη λειτουργία μιας πλήρως συναρμολογημένης συσκευής. Όπως μπορείτε να δείτε, η πρώτη έξοδος τροφοδοσίας είναι σωστή. Στη δεύτερη έξοδο της τροφοδοσίας, μπορεί να φανεί ότι εάν οι κόκκοι κολληθούν και το καπάκι δεν κλείσει σωστά, τότε θα κινηθεί προς τα εμπρός και προς τα πίσω μέχρι να κλείσει σωστά.
Κωδικός προγράμματος: