

Ο συντάκτης βάσισε αυτό το έργο σε μια απλούστερη έκδοση. σπιτικό βάρκες και την τελειοποίησε. Οι αισθητήρες τοποθετούνται στο σκάφος για να αποφεύγονται τα εμπόδια και να μεταφέρονται στο φως. Πώς χρησιμοποιείται ο ελεγκτής στο σκάφος Arduino, ένας υπερηχητικός αισθητήρας είναι τοποθετημένος μπροστά και οι αισθητήρες φωτός βρίσκονται στα πλάγια. Αυτό το απλό σκάφος δεν καταρρέει στους τοίχους και ελέγχεται από ένα φακό.
Υλικά και εργαλεία:
- Μονωτική ταινία / κολλητική ταινία
- Θερμοκόλλη με ζεστή κόλλα
- Κινητήρες DC 2 τεμ
- Πλαστικές φιάλες 2 τεμ
- καλώδια
- Μικρές προπέλες 2 τεμ
- Arduino, καλώδιο υπολογιστή και USB
- Πλαστικό κιβώτιο
- Μπαταρία και υποδοχή 9V
- Δίοδοι ισχύος (τύπου 1N4004)
- Αντιστάσεις
- Τρανζίστορ MOSFET ή TIP 120
- Δύο φωτοκύτταρα και δύο κουμπιά
- ψαλίδι
- Κόλληση με συγκολλητικό σίδερο

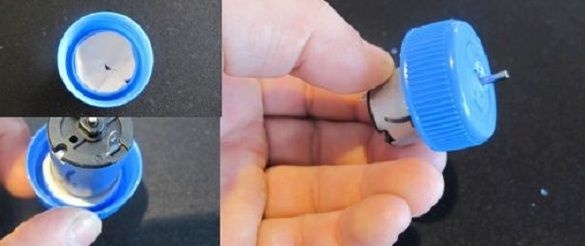
Βήμα 1. Εγκατάσταση κινητήρων.
Τα καπάκια αφαιρούνται από τα μπουκάλια και γίνεται μια τρύπα σε κάθε μία από αυτές. Μέσα στο κάλυμμα, ο συγγραφέας πιέζει την καυτή κόλλα χωρίς να κλείνει τις τρύπες. Έβαλε τον άξονα του κινητήρα στην τρύπα και το έβαλε στη κόλλα. Αφού στεγνώσει η κόλλα, ο άξονας περιστρέφεται ελεύθερα. Η ίδια διαδικασία γίνεται με το δεύτερο κάλυμμα.
Βήμα 2. Τοποθέτηση των φιαλών.
Οι φιάλες στερεώθηκαν μαζί με την αρχή μιας σχεδίας με τη βοήθεια τριών ταινιών κολλητικής ταινίας.

Βήμα 3. Συγκόλληση στις μηχανές.
Δεδομένου ότι οι κινητήρες που τοποθετούνται στα βύσματα δεν είχαν καλώδια, ήταν απαραίτητο να τα συγκολλήσουν, το μήκος των συρμάτων ήταν περίπου 25-30 cm.

Βήμα 4. Το κόψιμο των φιαλών.
Προκειμένου τα σύρματα να πέσουν στο κύτος του σκάφους, δημιουργείται μια μικρή σχισμή από την άνω πλευρά τους.

Βήμα 5. Ασφάλιση των κινητήρων.
Επιπλέον, ο συντάκτης περιστρέφει τα καπάκια στις φιάλες, καθώς δεν στρίβουν καλά, έπρεπε να χρησιμοποιήσω καυτή κόλλα. Τα καλώδια ωθούνται μέσα από τις προετοιμασμένες οπές στις φιάλες.

Βήμα 6. Περίπτωση.
Ένα πλαστικό κουτί κολλά σε δύο φιάλες. Σε αυτή την χωρητικότητα για ηλεκτρονικά, μπορείτε να κάνετε τρύπες για τα καλώδια ή να κρατήσετε τα καλώδια μέσα από το πίσω μέρος του κουτιού. Οι οπές για τα καλώδια στις φιάλες είναι μονωμένες με κόλλα θερμής τήξης.

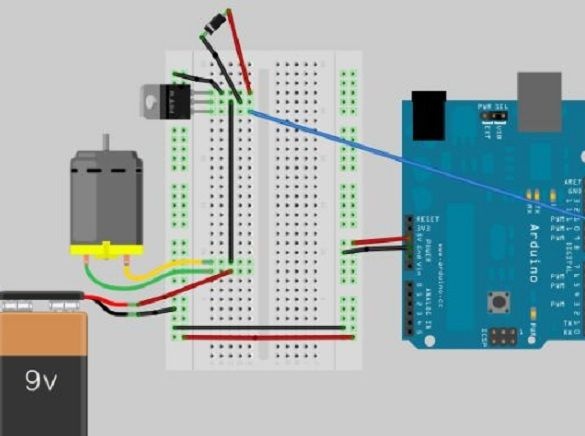
Βήμα 7. Διάγραμμα συνδεσμολογίας.
Το κύκλωμα χρησιμοποιεί ένα τρανζίστορ TIP 120 ως διακόπτη (μπορείτε να χρησιμοποιήσετε παρόμοια τρανζίστορ MOSFET ή Darlington). Χρησιμοποιείται για να αλλάξει το φορτίο όταν καταναλώνει μεγάλο ρεύμα, αφού το Arduino δεν έχει αρκετή ισχύ για τους κινητήρες. Αυτό το κύκλωμα συναρμολογείται για τον πρώτο και στη συνέχεια για τον δεύτερο κινητήρα (δεν απαιτείται άλλη μπαταρία για τον δεύτερο κινητήρα).
Βήμα 8. Αισθητήρες.
Ο υπερηχητικός αισθητήρας είναι ιδανικός για το μπροστινό μέρος του σκάφους, προειδοποιεί για εμπόδια στο δρόμο. Τα φωτοκύτταρα λειτουργούν σαν κεραίες και χρησιμοποιούνται για να κάνουν το σκάφος να επιπλέει στο φως.Τα κουμπιά στις πλευρές χρησιμοποιούνται ως αισθητήρες εμποδίων. Μπορείτε επίσης να τροποποιήσετε τον κωδικό και να χρησιμοποιήσετε άλλους αισθητήρες, όπως υπέρυθρες.

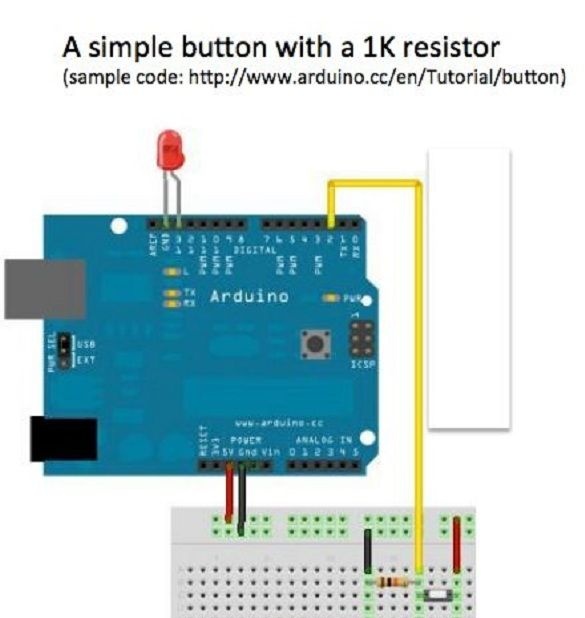
Βήμα 9. Σχέδια για αισθητήρες.
Το διάγραμμα δείχνει τη σύνδεση ενός απλού κουμπιού και ενός αντιστάτη 1Κ. Το σχήμα και για τα δύο κουμπιά επαναλαμβάνεται, τα κουμπιά τοποθετούνται και στις δύο πλευρές του σκάφους. Θα είναι υπεύθυνοι για την αλλαγή της κίνησης του σκάφους σε σύγκρουση.
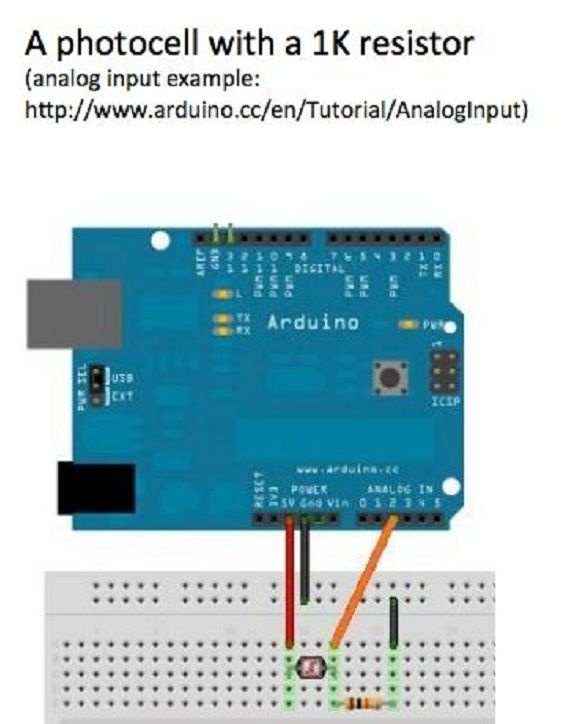
Το παρακάτω σχήμα δείχνει ένα κύκλωμα με αντίσταση 1Κ και φωτοκύτταρο. Ο συγγραφέας το εκτέλεσε 2 φορές και τοποθετούσε τα φωτοκύτταρα στις αντίθετες πλευρές του σκάφους.
Βήμα 10. Κωδικός προγράμματος.
Ο συντάκτης έδωσε την ευκαιρία να κατεβάσει τον κωδικό του για χρήση, παρέχοντας έτσι τη βασική λειτουργικότητα για όσους θα συναρμολογήσουν ένα τέτοιο σκάφος. Ο κώδικας περιλαμβάνει υποστήριξη για φωτοκύτταρα, φασματόμετρο και κουμπιά. Το σκάφος θα προσπαθήσει να αποφύγει εμπόδια μπροστά του και γυρίζει προς την αντίθετη κατεύθυνση όταν συναντά εμπόδια από την πλευρά. Αν δεν υπάρχει επιθυμία χρήσης ολόκληρου του συνόλου αισθητήρων, αλλά μόνο μερικοί από αυτούς έχουν έναν κωδικό για κάθε ξεχωριστά. Μπορείτε να κατεβάσετε όλους τους κωδικούς κάτω από το άρθρο.
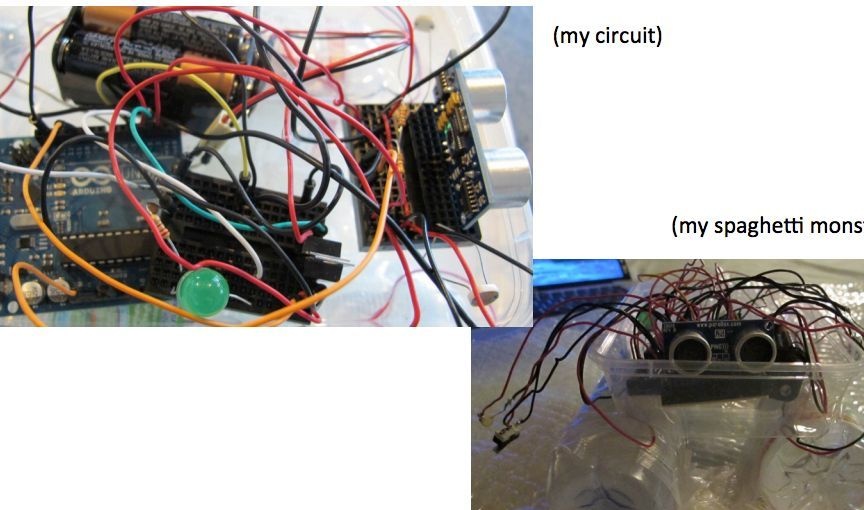
Βήμα 11. Συναρμολόγηση του σκάφους.
Το συναρμολογημένο κύκλωμα, το Arduino και οι μπαταρίες είναι συσκευασμένες σε κουτί.
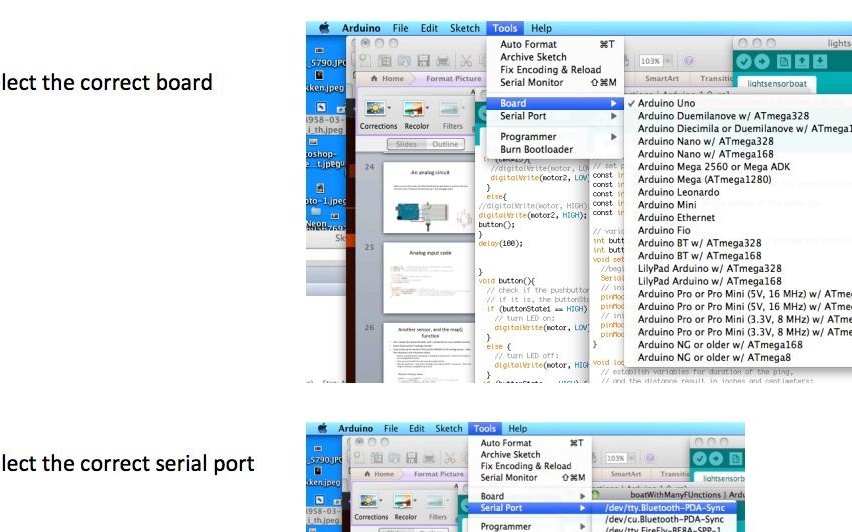
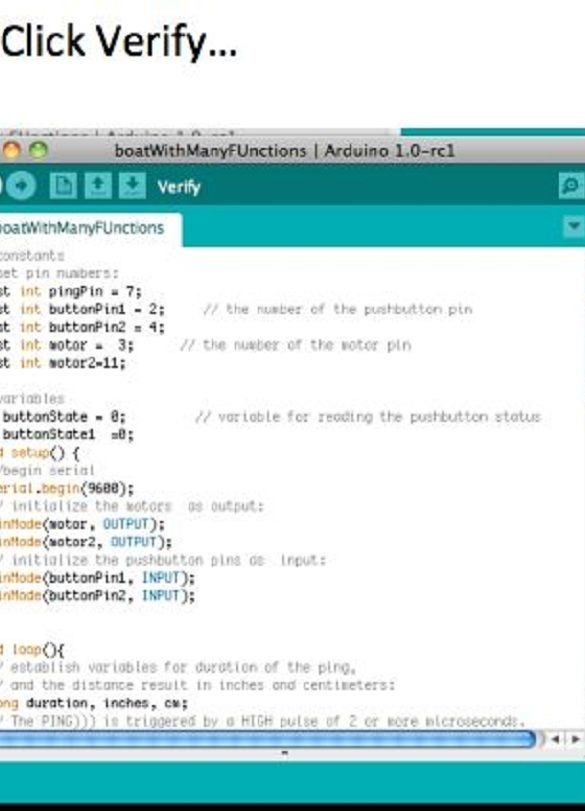
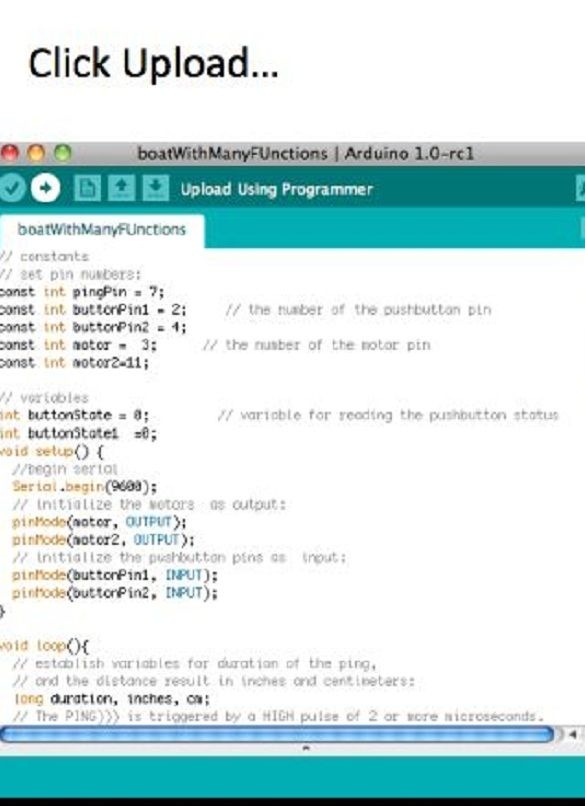
Βήμα 12. Κατεβάστε το σκίτσο.
Ακολούθως ανοίγει ο IDE του Arduino, επιλέγοντας το σωστό αρχείο και θύρα, μετά από τον οποίο ο συντάκτης συντάσσει και ανεβάζει τον κώδικα στον ελεγκτή.
Βήμα 13. Ανθεκτικό στο νερό και δοκιμή.
Ο συγγραφέας απομόνωσε επιπλέον όλους τους πιθανούς χώρους εισροής νερού με θερμή κόλλα. Επίσης μονωμένα όλα τα καλώδια από βραχυκύκλωμα. Το δοχείο με Arduino καλύπτεται με το ίδιο κουτί και σφραγίζεται με ηλεκτρική ταινία. Οι έλικες συνδέονται με τους κινητήρες. Εδώ το σκάφος είναι έτοιμο, τώρα μπορείτε να ξεκινήσετε τις δοκιμές στο νερό.



Βίντεο με προκαταρκτικό έλεγχο της βάρκας: