
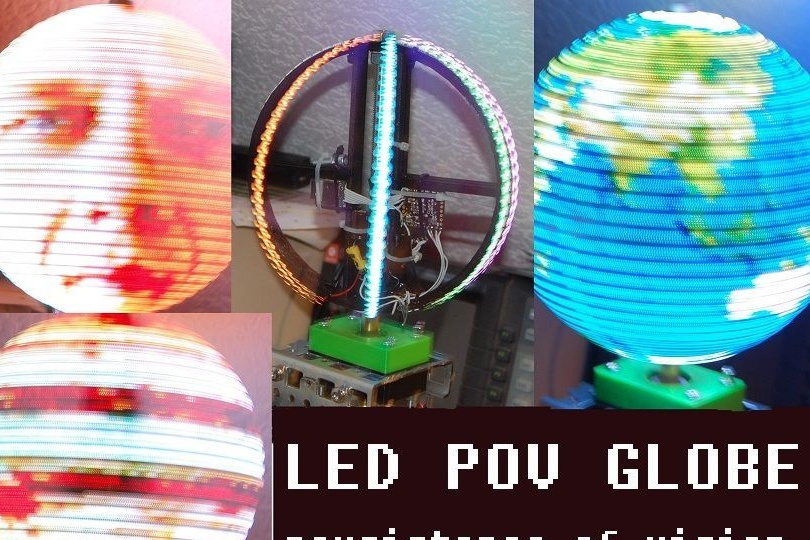
Αυτό το σεμινάριο είναι για το πώς να οικοδομήσουμε μια πλατφόρμα POV με λιγότερα. ηλεκτρονικό εξαρτήματα από άλλες παρόμοιες συσκευές. Μέσω της χρήσης LED RGB με ενσωματωμένο ελεγκτή APA102. Αυτό θα σας εξοικονομήσει την συγκόλληση πολλών καλωδίων. Μπορείτε να διαβάσετε περισσότερα για αυτά. Αυτές οι λυχνίες LED δεν χρειάζονται επιπλέον οδηγό. Συνδέονται απευθείας στον μικροελεγκτή με δύο τρόπους. Αυτό σας επιτρέπει να αλλάζετε πολύ γρήγορα τις λυχνίες LED. Για να έχετε μια σταθερή εικόνα, ο συγχρονισμός SPI έρχεται σε συχνότητα 10 MHz. Ένα άλλο πλεονέκτημα αυτού του σχεδιασμού είναι η χρήση κάρτας flash, η οποία αποθηκεύει την εικόνα σε μορφή BMP.
1 Απαιτούμενα υλικά

Για τον άξονα της υδρόγειο θα χρειαστείτε:

1. Καρφίτσα με σπείρωμα M8 και μήκος 250 mm
2. Παξιμάδι M8
3. Κουκούλα από ορείχαλκο μήκους 10 mm και 100 mm
4. Πλαστικές ροδέλες 8 mm 2 τεμάχια (περιλαμβάνονται τα αρχεία STL)
5. σύζευξη για όσους θα χρησιμοποιήσουν το βηματικό μοτέρ NEMA 17
Για να τροφοδοτήσετε τον δακτύλιο LED στον άξονα, θα χρειαστείτε
1. ρουλεμάν 6300 (10x35x11)
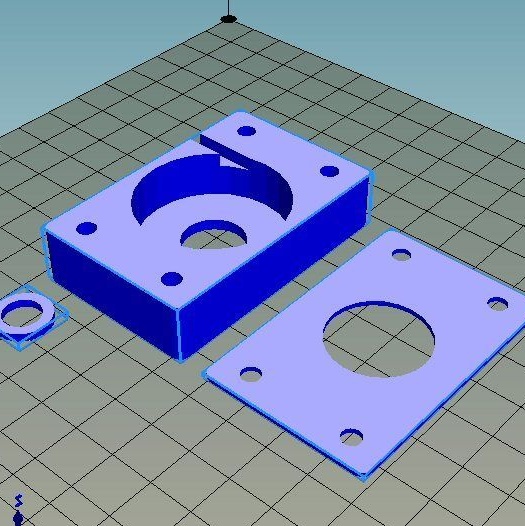
2. δύο βραχίονες για έδρανα. Τυπωμένο σε έναν εκτυπωτή 3d ή κατασκευασμένο από ξύλο.
3. Τέσσερις βίδες M4x40 με παξιμάδια
4. Συμβουλές για καλώδια 2 τεμ 8 χιλιοστά
5. με διάμετρο άξονα 5 mm
6. 4 μπουλόνια M4 για τοποθέτηση κινητήρα
7. ίσως ένας ανεμιστήρας σε αυτό.
Εναλλακτικά, μπορείτε να χρησιμοποιήσετε οποιονδήποτε κινητήρα με τη σωστή ρύθμιση ροπής και ταχύτητας. Ο κινητήρας που χρησιμοποιείται σε αυτό το σχέδιο έχει μέγιστη ροπή με ρεύμα 50Α, αλλά η μέγιστη κατανάλωση ρεύματος κατά τη λειτουργία είναι μόνο 18Α.
Για να ελέγξετε το πρόγραμμα οδήγησης του σερβοκινητήρα, χρησιμοποιήστε το
1.
2. δύο κουμπιά
Τροφοδοσία 12V για κινητήρα και 5V για LED. Ως τροφοδοτικό, μπορείτε να χρησιμοποιήσετε την παλιά μονάδα από τον υπολογιστή. Μπορείτε να αγοράσετε ένα 12v / 5A τροφοδοτικό και να το συνδέσετε
Για το δαχτυλίδι LED θα χρειαστείτε:
1,664 LED 2 λωρίδες 32 τεμαχίων
2. Πυκνωτής 1000μF 10V
3. Αισθητήρας Hall και μαγνήτης
4. Η αντίσταση έλξης 1k, 10k
5. Ο δακτύλιος πρέπει να εκτυπωθεί σε έναν εκτυπωτή 3D ή να χρησιμοποιηθεί ένα κομμάτι σωλήνα από PVC
6. Πλαστικοί δεσμοί (100 mm)
7. Μια καλή κόλλα που κολλάει μαζί και δεν πετάει χωριστά στις 2500 σ.α.λ.
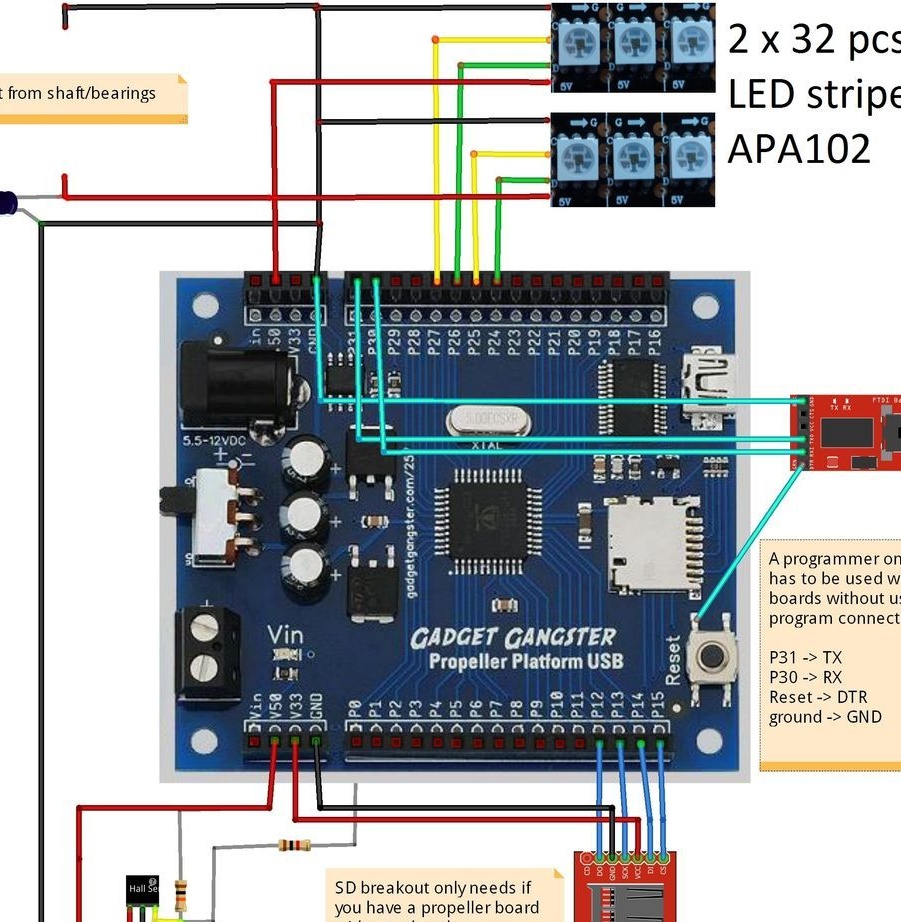
Θα χρειαστείτε επίσης έναν μικροελεγκτή Parallax Propeller Microcontroller. Ή μπορείτε να χρησιμοποιήσετε ένα άλλο το μοντέλο ελεγκτή, αλλά επιπλέον χρεώνουν. Αυτός ο ελεγκτής προγραμματίζεται και αναβοσβήνει τόσο απλά όσο Arduino. Θα χρειαστείτε ένα προσαρμογέα USB-TTL για να προγραμματίσετε και τους δύο ελεγκτές.
Σώμα.
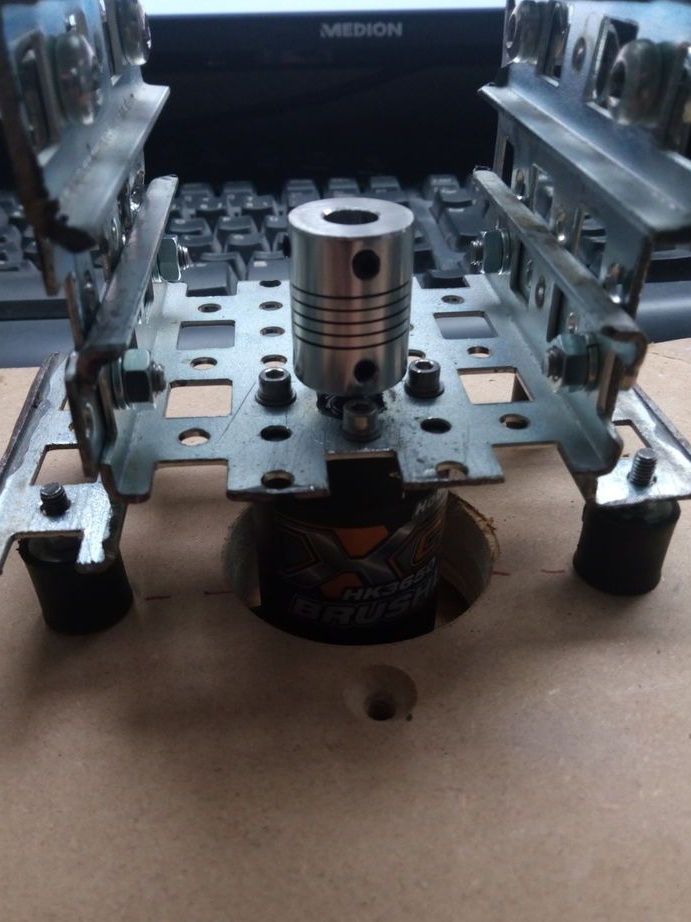
Στέγαση για σπιτικό Μπορείτε να πάρετε κάθε αρκετά σκληρό. Το πιο σημαντικό είναι ότι μπορείτε να στερεώσετε ασφαλώς τον κινητήρα και τα έδρανα.
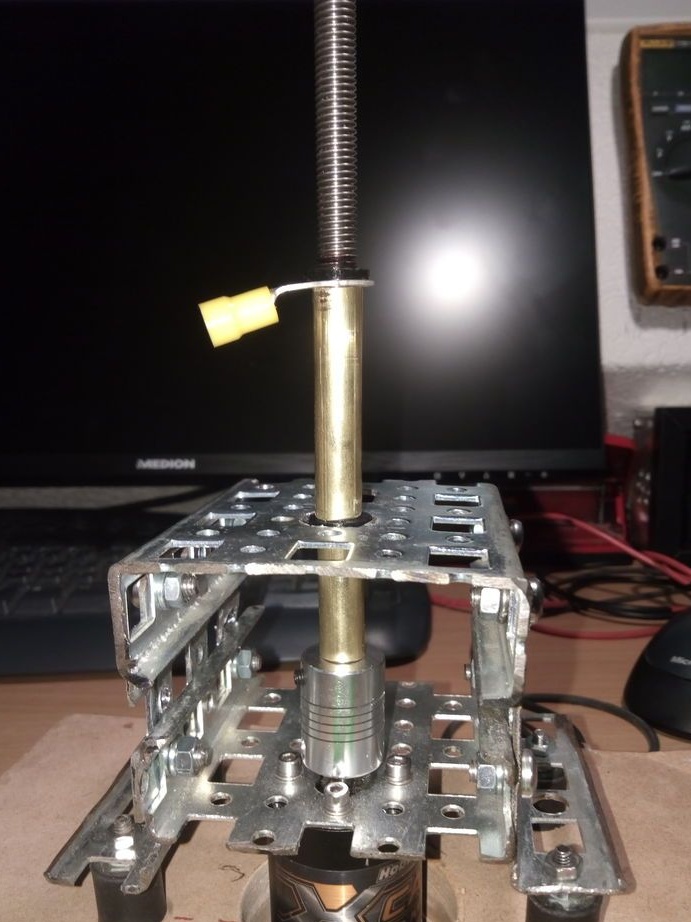
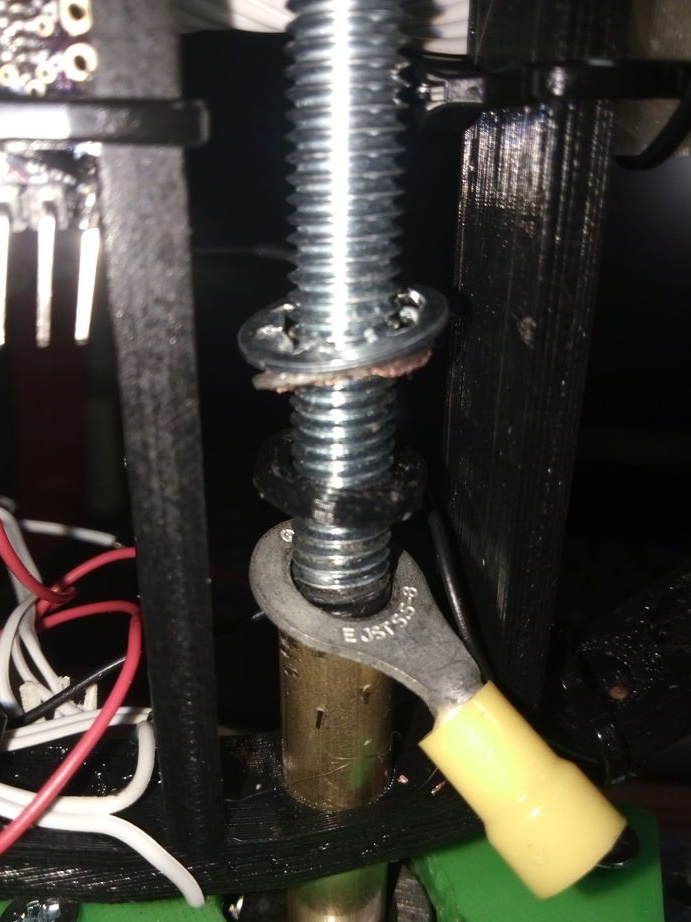
Για τον άξονα μετάδοσης κίνησης χρησιμοποιείται ένα βύσμα μήκους 250 mm.Το μήκος των δαχτυλιδιών ορείχαλκου είναι 50 και 30 mm. Εξαρτάται από το μέγεθος του δακτυλίου και το μήκος του άξονα. Το επάνω και μακρύτερο περίβλημα πρέπει να απομονώνεται από το πείρο, επειδή χρησιμοποιείται για να τροφοδοτεί και να τροφοδοτεί τα LED. Για να γίνει αυτό, τυλίξτε την ηλεκτρική ταινία σε μια φουρκέτα ή χρησιμοποιήστε θερμική συρρίκνωση, δύο πλαστικές ροδέλες θα χρειαστούν επίσης. Το μανίκι θα πρέπει να τρυπηθεί σε 8,5-9mm διαφορετικά δεν θα ταιριάζει. Το άλλο μανίκι μαζί με τη ράβδο σχηματίζει αρνητική επαφή.
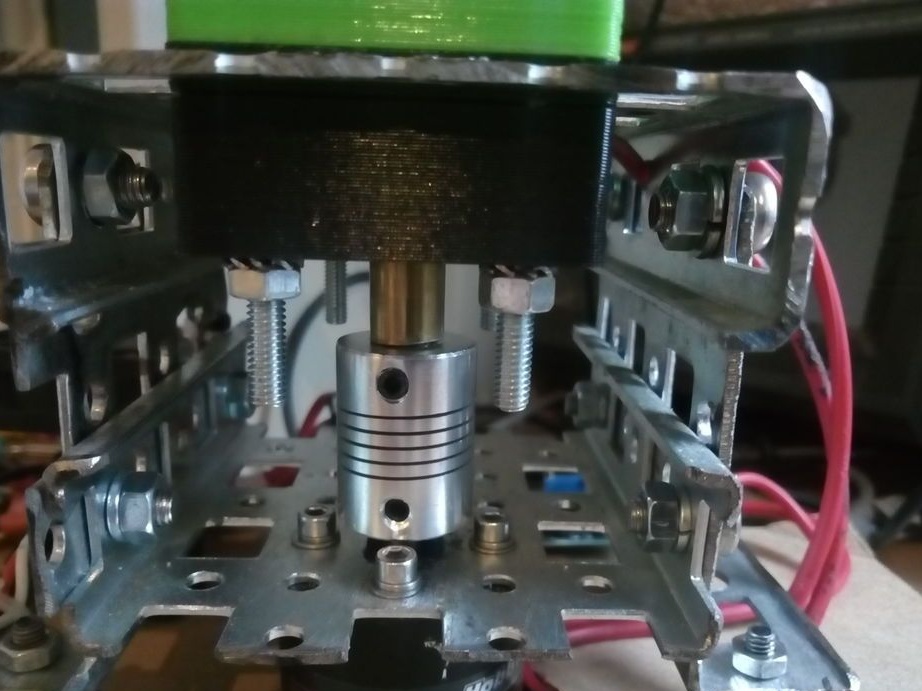
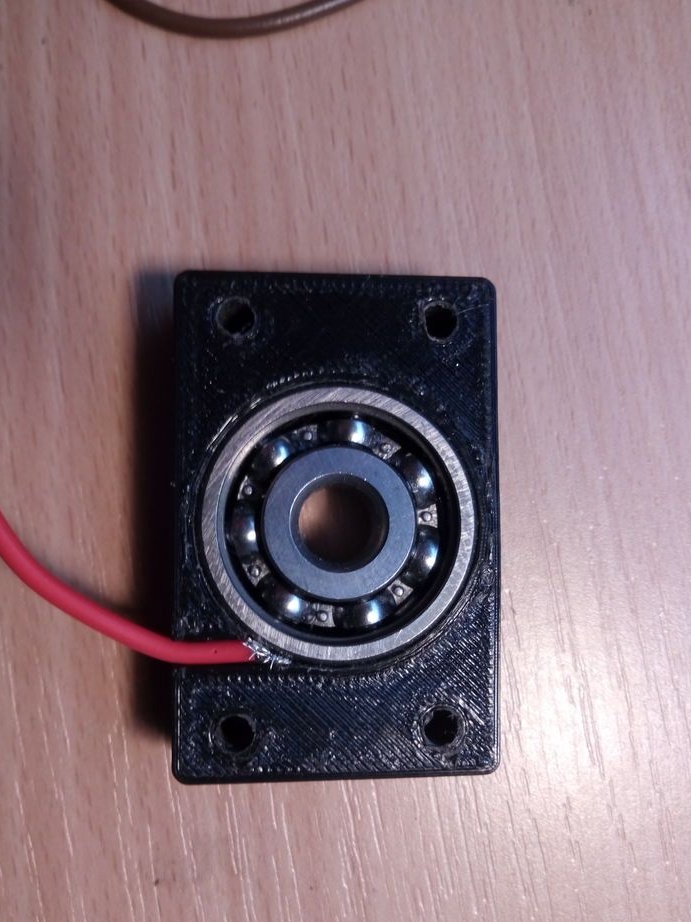
Η μειωμένη ισχύς τοποθετείται σε ειδική αυλάκωση και πιέζεται προς το ρουλεμάν του βραχίονα, το οποίο μπορεί να εκτυπωθεί σε έναν εκτυπωτή. Αρχειοθετήστε το αρχείο STL σε αρχείο.


Τώρα πρέπει να συνδέσετε τον ηλεκτροκινητήρα, όπως φαίνεται στο διάγραμμα.
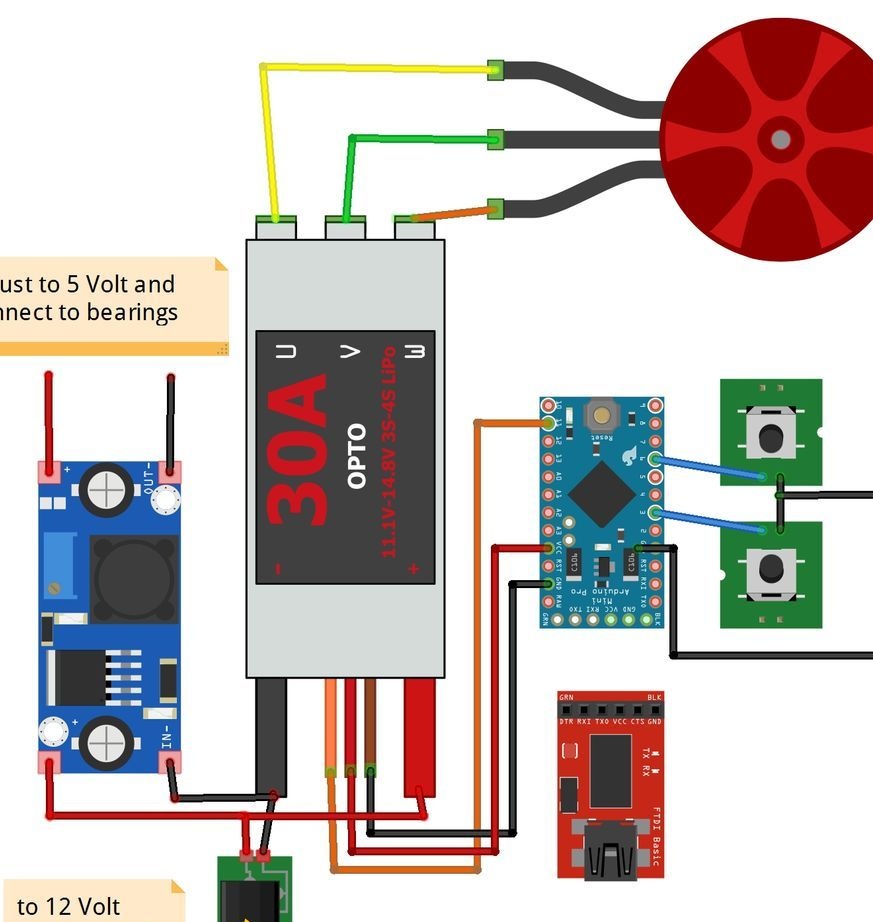
Δύο κουμπιά στο διάγραμμα χρησιμοποιούνται για τη ρύθμιση της ταχύτητας. Όταν ενεργοποιείτε την ισχύ, το ESC θα λάβει τιμή 500 μs. Πατήστε ένα από τα κουμπιά για να ενεργοποιήσετε τον κινητήρα. Το σκίτσο θα πάρει την τιμή "StartPos = 625". Αργότερα, όταν ρυθμίζετε την ταχύτητα, αυτή η τιμή μπορεί να αλλάξει. Πατήστε το κουμπί για δύο δευτερόλεπτα και ο κινητήρας πρέπει να σταματήσει.
Συναρμολόγηση της δομής του πυρήνα.
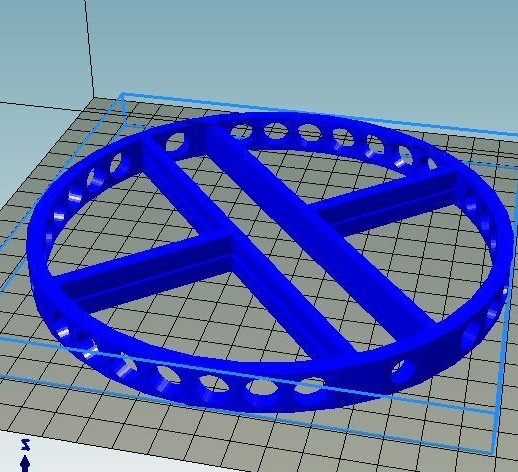

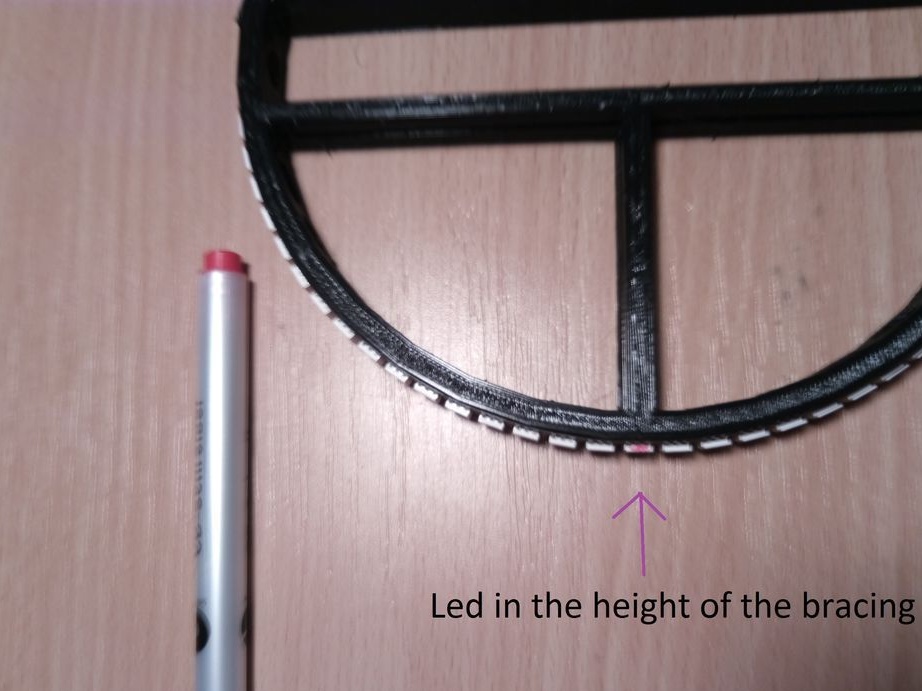
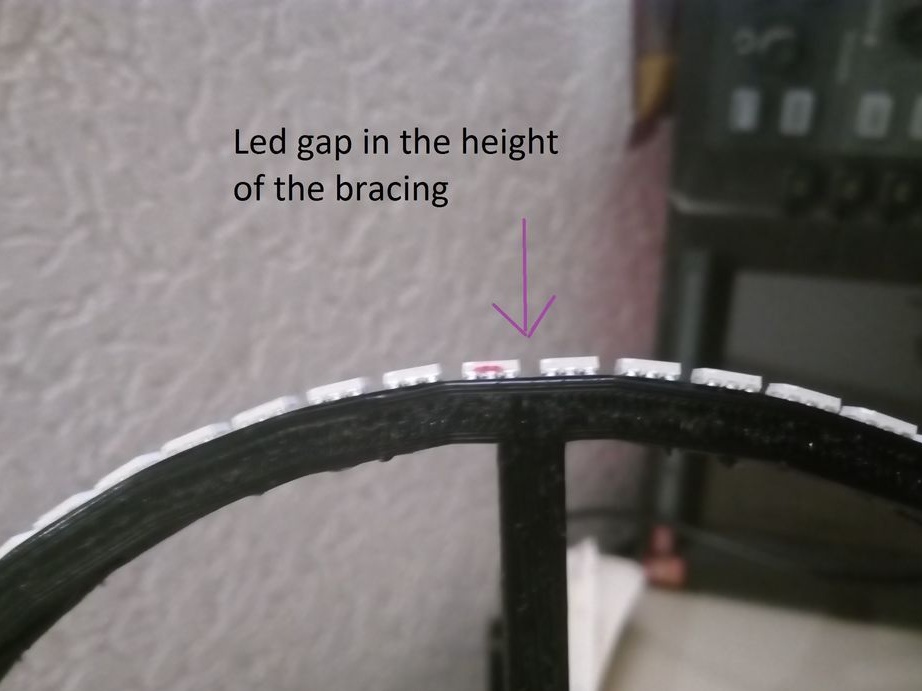


Για να το κάνετε αυτό, εκτυπώστε το ίδιο το δαχτυλίδι από το συνημμένο αρχείο. Ο συγγραφέας έκανε πολλές τρύπες σε το για να μειώσει το βάρος. Μπορείτε να χρησιμοποιήσετε ένα κομμάτι σωλήνα PVC. Καταργούνται δύο λωρίδες 32 LED. Δύο λωρίδες λυχνιών LED σχηματίζουν ομοιόμορφες και περιττές γραμμές. Τοποθετήστε τις ταινίες έτσι ώστε οι λυχνίες LED μίας λωρίδας να βρίσκονται ανάμεσα στις λυχνίες LED του άλλου, αλλά στην πίσω πλευρά. Αφού στερεώσετε την ταινία, μπορείτε να συνδέσετε τις λυχνίες LED της πλακέτας ελεγκτή. Και τότε πρέπει να εξισορροπήσετε ολόκληρο το συγκρότημα.
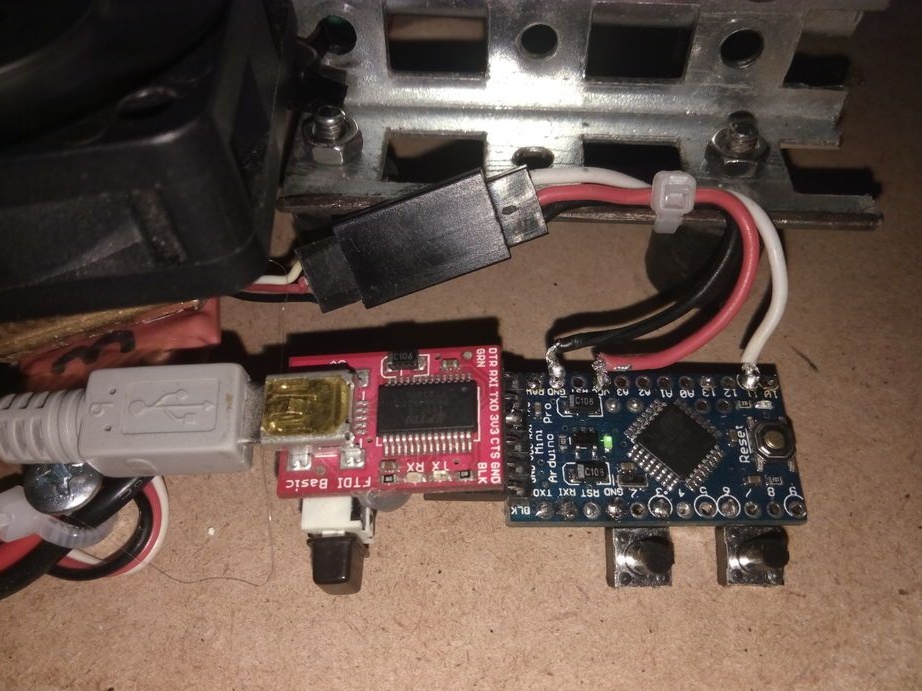
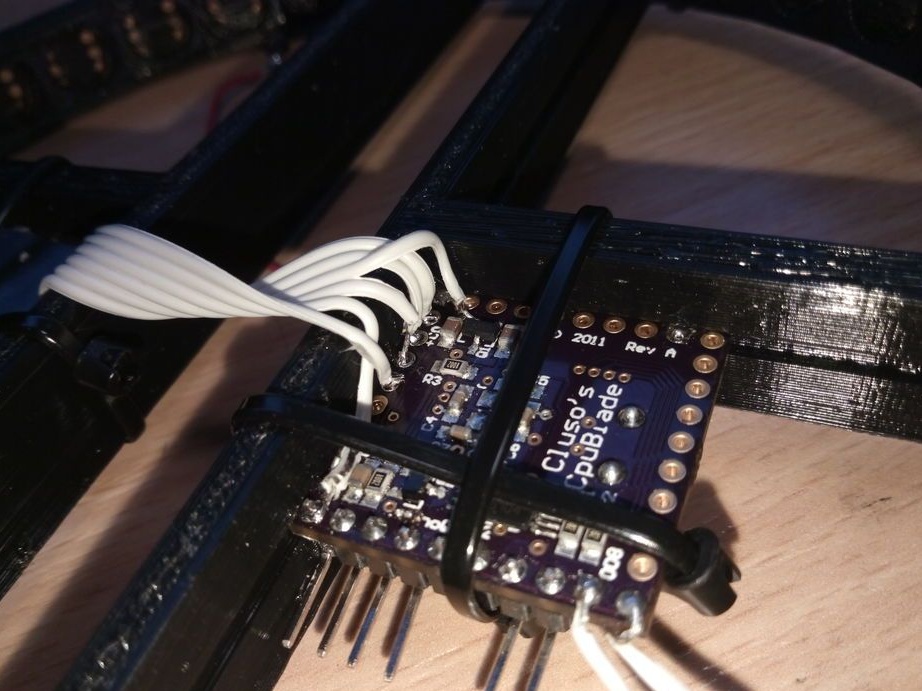
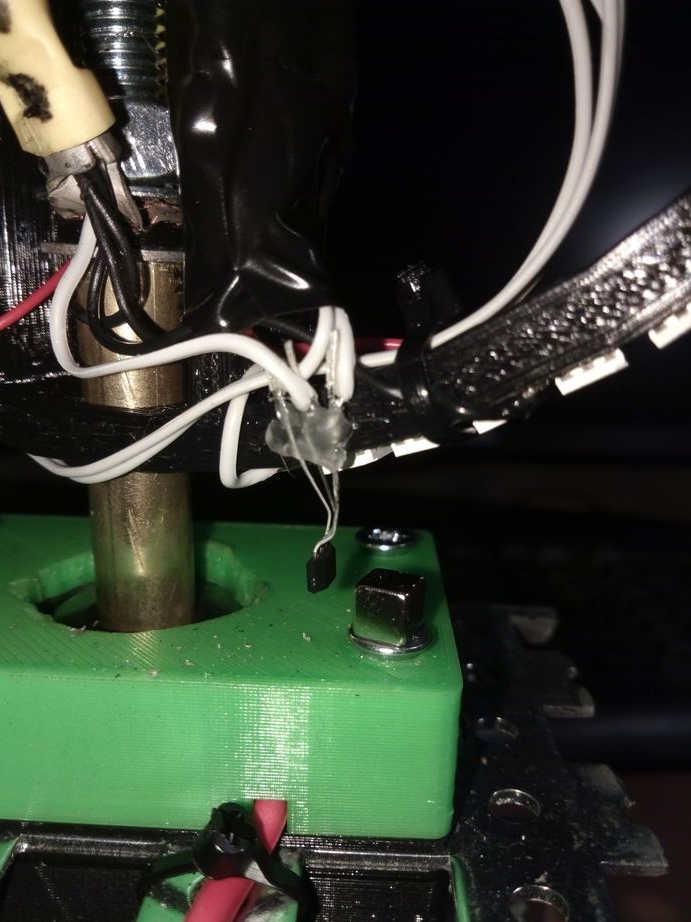
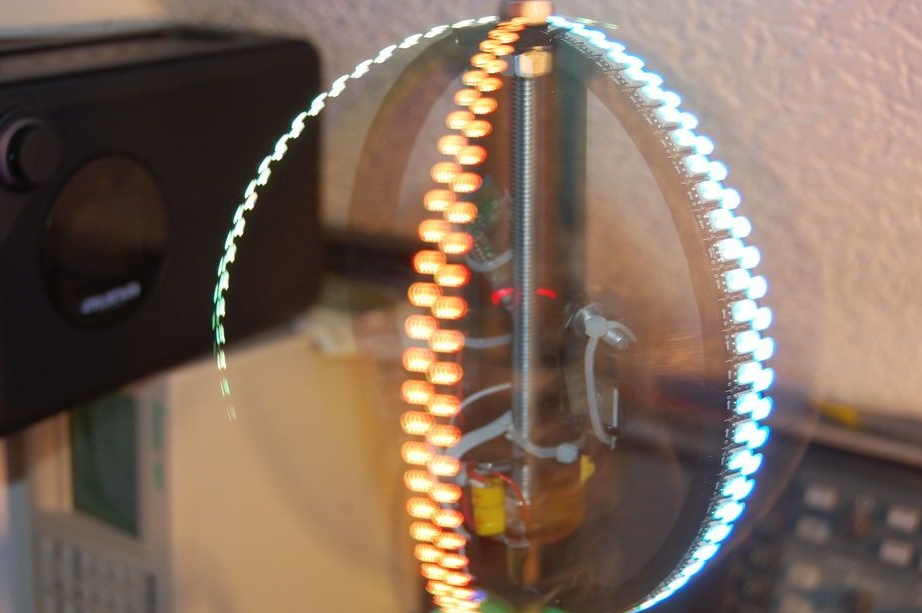
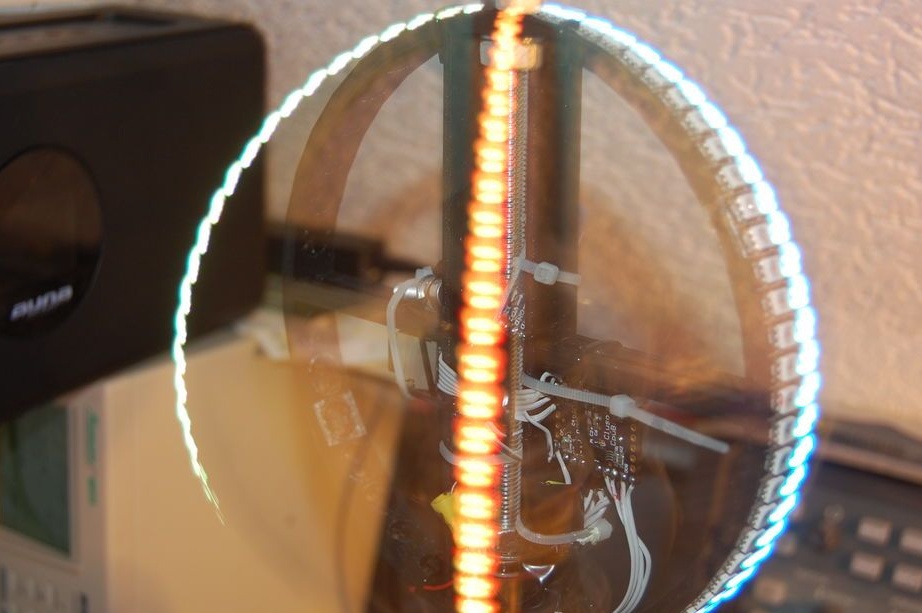
Οι παρακάτω φωτογραφίες δείχνουν τον τρόπο σύνδεσης όλων των στοιχείων της συσκευής. Η φωτογραφία δείχνει επίσης τον εγκατεστημένο αισθητήρα αίθουσας με μαγνήτη.
Για να προγραμματίσετε Parallax Propeller Microcontroller που χρειάζεστε
ΜΗ συνδέετε τον εξοπλισμό σας σε θύρα USB ή σε σειριακή θύρα μέχρι να εγκαταστήσετε το λογισμικό. Περισσότερες λεπτομέρειες σχετικά με τη μεταφόρτωση του υλικολογισμικού στο Parallax μπορούν να βρεθούν
Ο συγγραφέας χρησιμοποιεί μια παλαιότερη και επομένως λιγότερο οικονομική από πλευράς κατανάλωσης ενέργειας κάρτα MCU επειδή δεν μπορεί να βρει νέες βιβλιοθήκες στις νέες πλακέτες ελεγκτών.
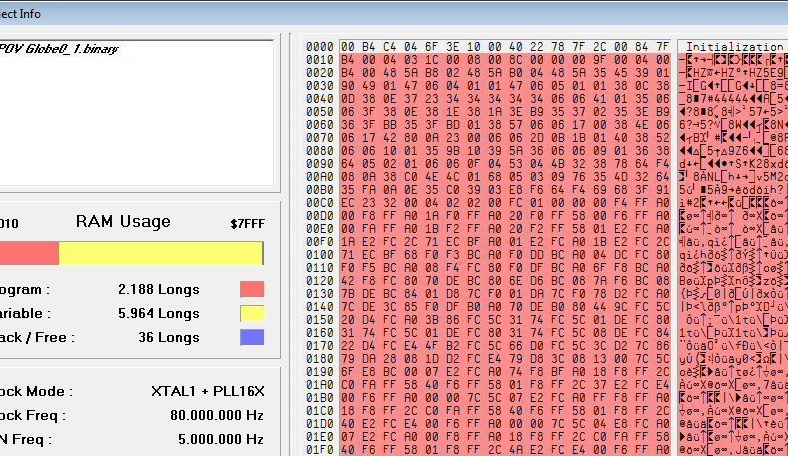
Αφού συλλέξετε και συνδέσετε τα πάντα, πρέπει να προγραμματίσετε τον ελεγκτή. Ο συγγραφέας το κάνει αυτό με βοήθεια. Αρχεία με υλικολογισμικό στο αρχείο.
Τώρα μπορείτε να δοκιμάσετε να ξεκινήσετε τη συσκευή. Από την αρχή, αντιγράψτε την ελεγχόμενη εικόνα στην κάρτα SD και επικολλήστε την στην υποδοχή.
• Αν περιστρέψετε το δαχτυλίδι με το χέρι, οι ενδεικτικές λυχνίες θα πρέπει να αναβοσβήνουν κάθε φορά που ο αισθητήρας της αίθουσας περνάει από το μαγνήτη
• Ενεργοποιήστε τον κινητήρα. Με την αύξηση της ταχύτητας με τα κουμπιά, είναι απαραίτητο να βεβαιωθείτε ότι οι λυχνίες LED ανάβουν όπως φαίνεται σε 2 φωτογραφίες
• Συνδέστε τον ακροδέκτη Arduino στον ελεγκτή κινητήρα.
• Να θυμάστε την εμφανιζόμενη τιμή.
• Σταματήστε τη μηχανή
• Γράψτε την τιμή που είχε αποθηκευτεί προηγουμένως στη μεταβλητή "startPos"σκίτσο POV_MotorControl
• Προγραμματίστε ξανά το Arduino.
Την επόμενη φορά που ο κινητήρας σας ξεκινά αμέσως με τη σωστή ταχύτητα. Τώρα μπορείτε να "Συμπληρώσετε" στο χάρτη οποιαδήποτε εικόνα. Για να γίνει αυτό, πρέπει να αλλάξετε το μέγεθος της εικόνας κατά 120x64 εικονοστοιχεία, να περιστρέψετε την εικόνα αριστερόστροφα κατά 90 μοίρες και να καθρέφτητε κάθετα. Μειώστε τη φωτεινότητα της εικόνας, καθώς τα LED είναι πολύ φωτεινά. Για να γίνει αυτό, είναι καλύτερο να χρησιμοποιήσετε τη διόρθωση γάμμα με συντελεστή 0,45.
Αποθηκεύστε την εικόνα ως 24 bit BPM χωρίς συμπίεση. Μετά από όλους τους χειρισμούς, το αρχείο εξόδου θα είναι το μέγεθος 23094 byte.



