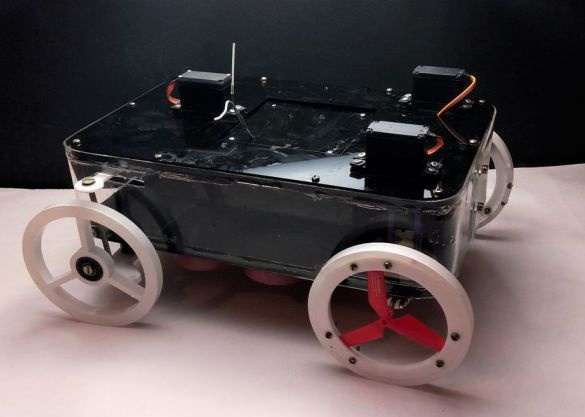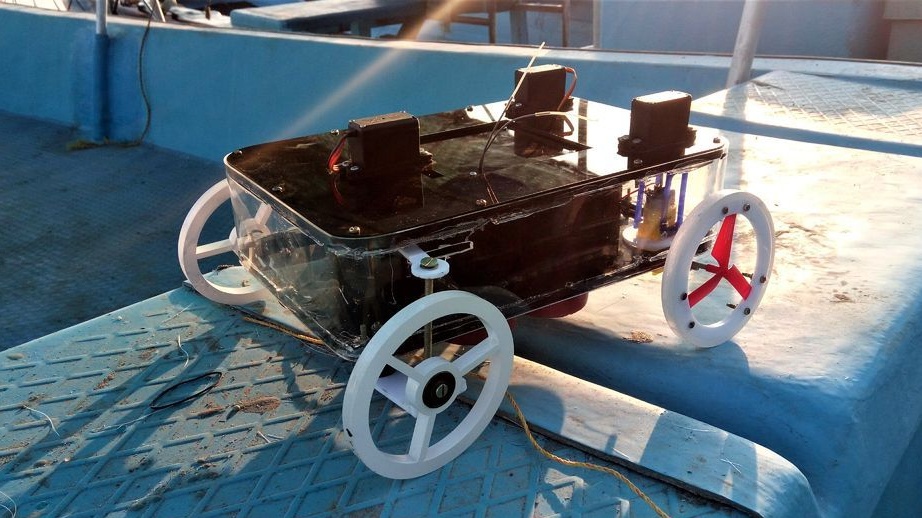



Σε αυτό το άρθρο, θα εξετάσουμε την κατασκευή από ινδούς τεχνίτες οχήματος παντός εδάφους που κινούνται τόσο στο έδαφος όσο και στο νερό. Όλα τα οχήματα εδάφους αποτελείται από μια πλωτή πλατφόρμα με τροχούς και έλικα. Οι μηχανισμοί ελέγχονται από το τηλεχειριστήριο μέσω Arduino UNO.
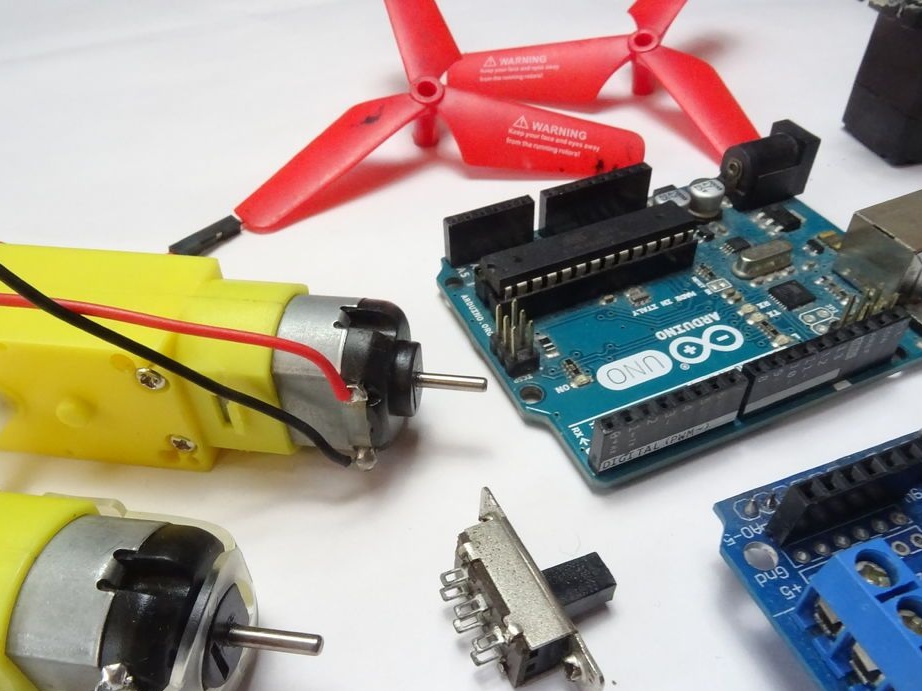
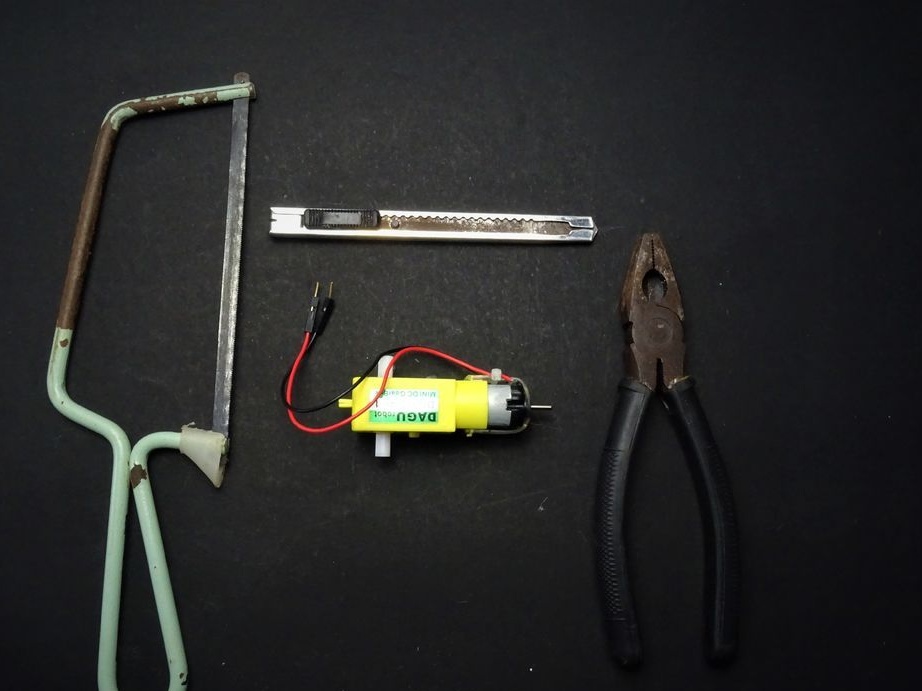
Εργαλεία και υλικά:
-
-AKB 9V.
-Παρέκταση.
-Ακρυλ.
-Plywood;
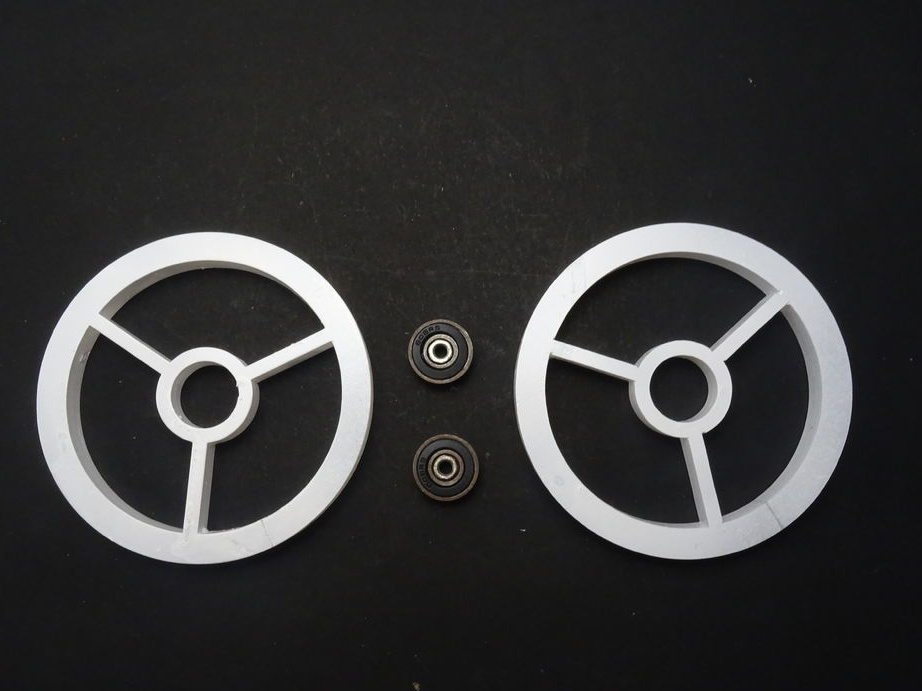
(με αναφορά, το έδρανο είναι 8 x 16 x 5 mm, ο συγγραφέας δηλώνει 8 * 22 mm)
-Δύο έλικες.
-Συνδέσεις.
-Φλοκές.
-Περιέρα κόλλας.
-Σύγιστη κόλλα.
Εποξειδική ρητίνη.
-Σολλητικό σίδερο.
-Drill;
-Διακόπτες λέιζερ.
-Saw;
- κατσαβίδι ·
-Drill;
-Σολλητικό σίδερο.
-Board;
- Υπολογιστή με λογισμικό.


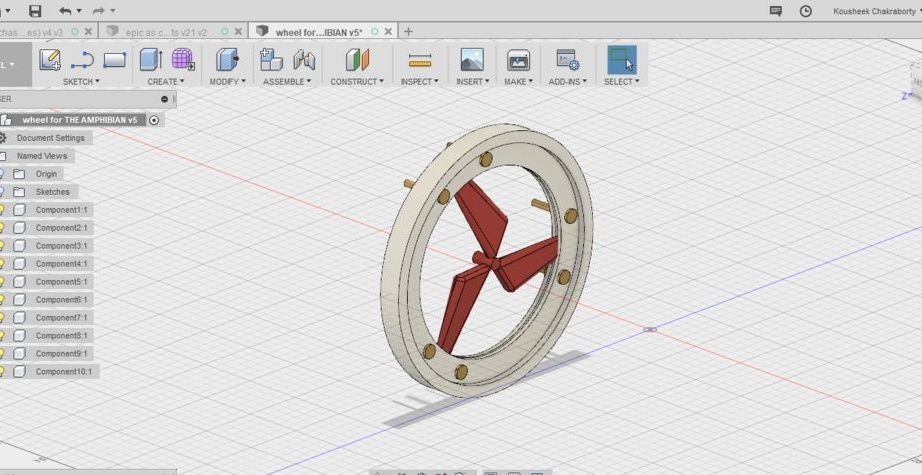
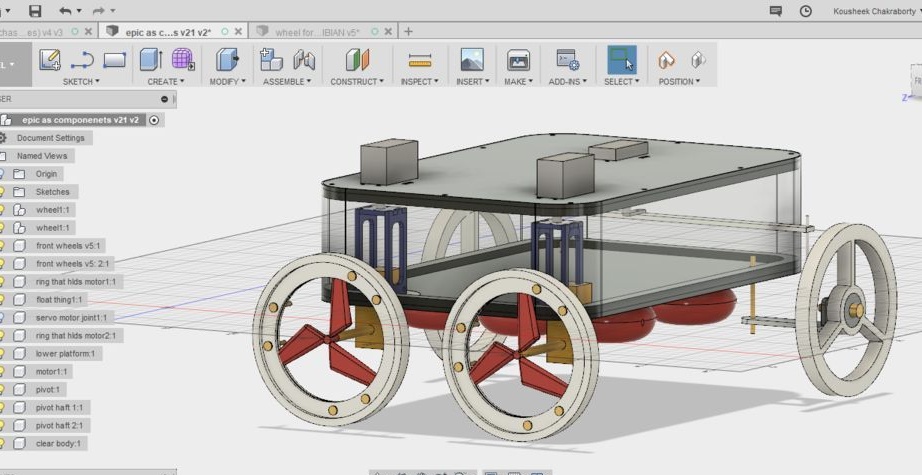
Βήμα πρώτο: Σχεδιασμός
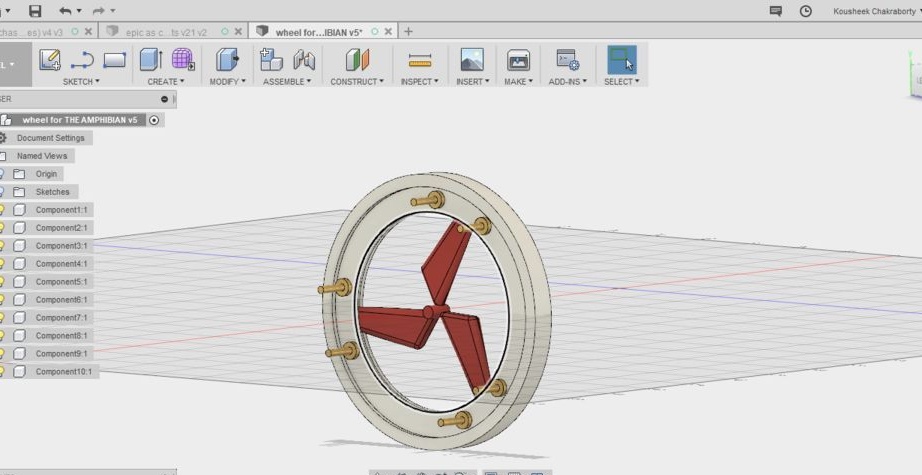
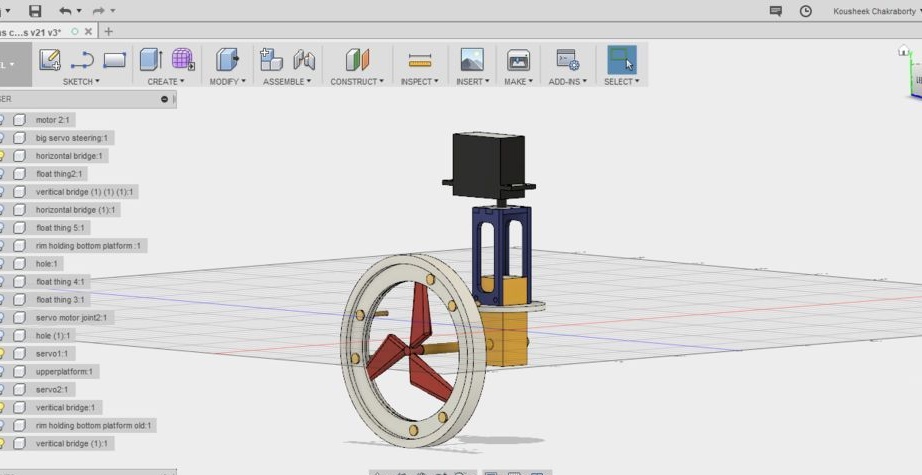
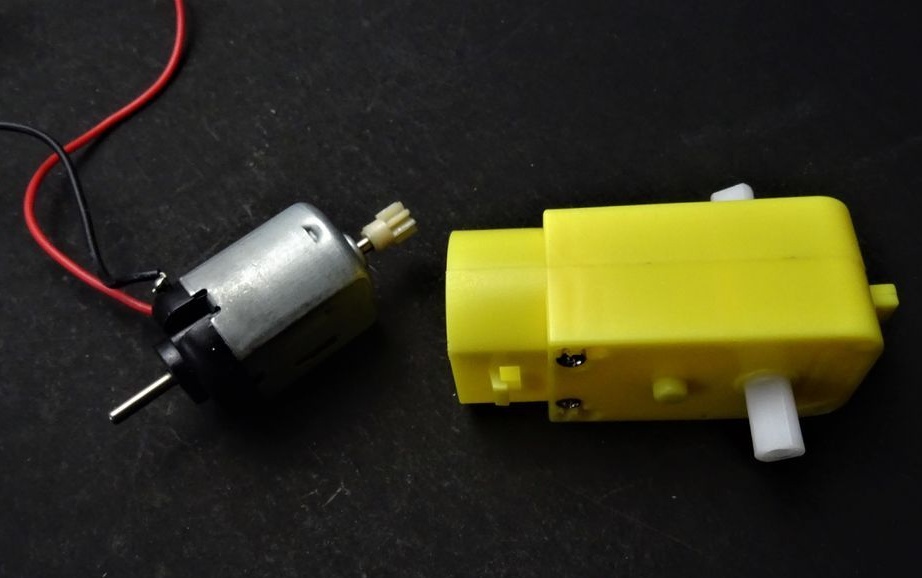
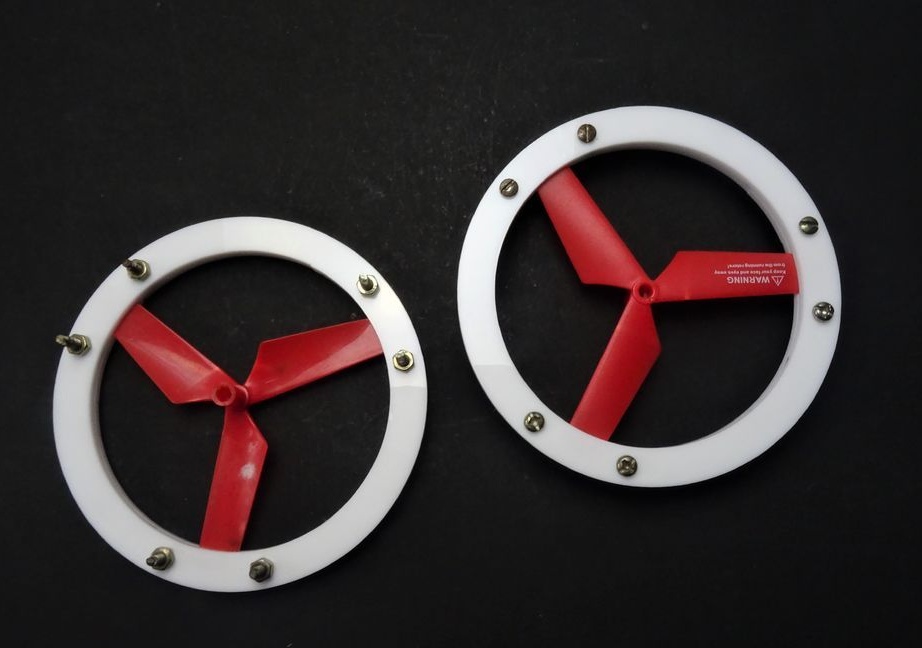
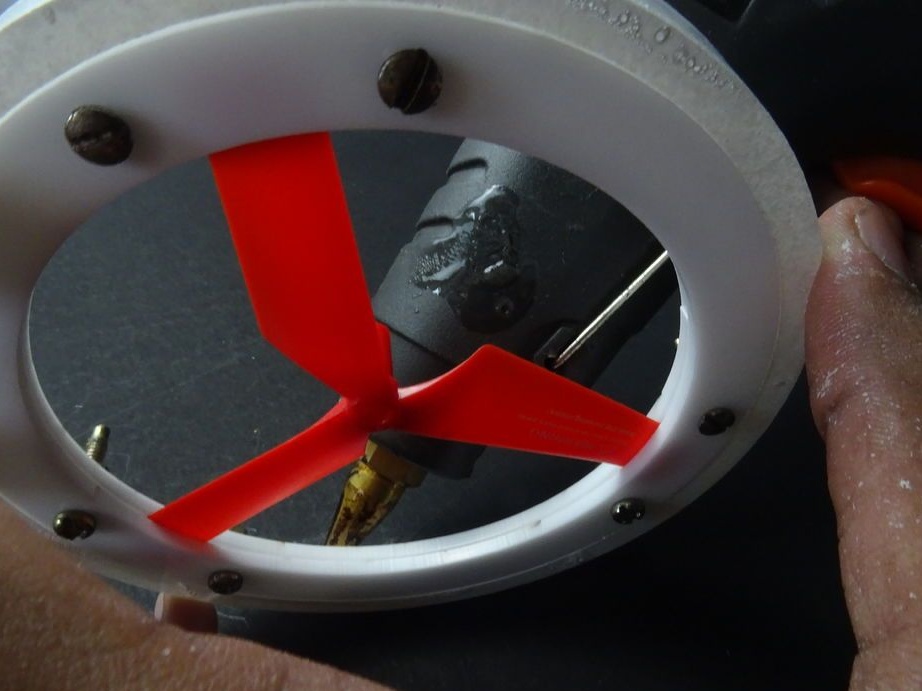
Για να δημιουργήσουν το έργο, οι πλοίαρχοι χρησιμοποίησαν το πρόγραμμα Fusion 360. Η όλη δυσκολία ήταν να συνδυαστεί η κίνηση στο έδαφος και στο νερό. Κατά το σχεδιασμό των τροχών, οι πλοίαρχοι ανέπτυξαν ένα σύστημα στο οποίο οι βίδες θα ανοίγουν στο νερό, αλλά λόγω της πολυπλοκότητας του σχεδιασμού, απλώς ενσωμάτωναν τις προπέλες από το παιδικό παιχνίδι μέσα στον τροχό. Αυτό επιτρέπει στους τροχούς να μετακινούν το όχημα παντός εδάφους στη γη και όταν μπαίνουν στο νερό, οι βίδες είναι ενεργοποιημένες.
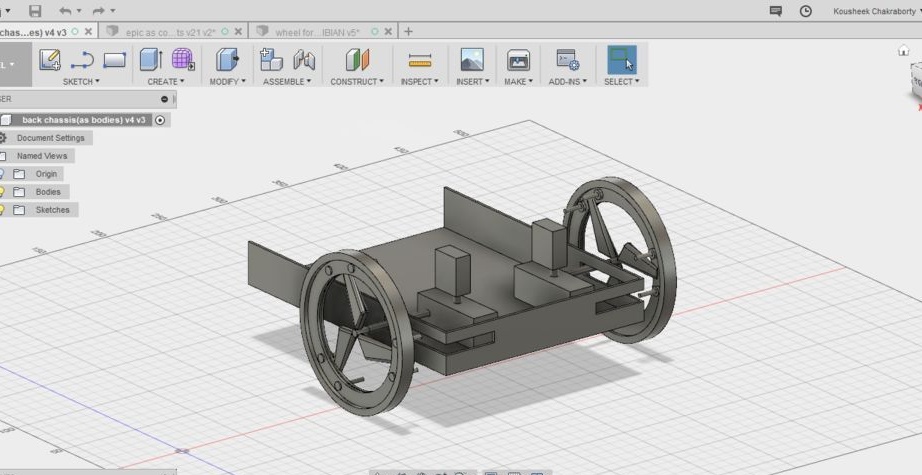
Για να εφαρμόσετε αυτήν την ιδέα, θα πρέπει να είστε σε θέση να περιστρέψετε τους πίσω τροχούς κάθετα στο όχημα παντός εδάφους όταν οδηγείτε στο νερό. Αυτό κατέστη δυνατό όταν οι μηχανισμοί μετάδοσης κινητήρα βγήκαν έξω από το πλαίσιο. Τα πλαστικά κιβώτια ταχυτήτων και το νερό που εισέρχονται δεν θα βλάψουν.
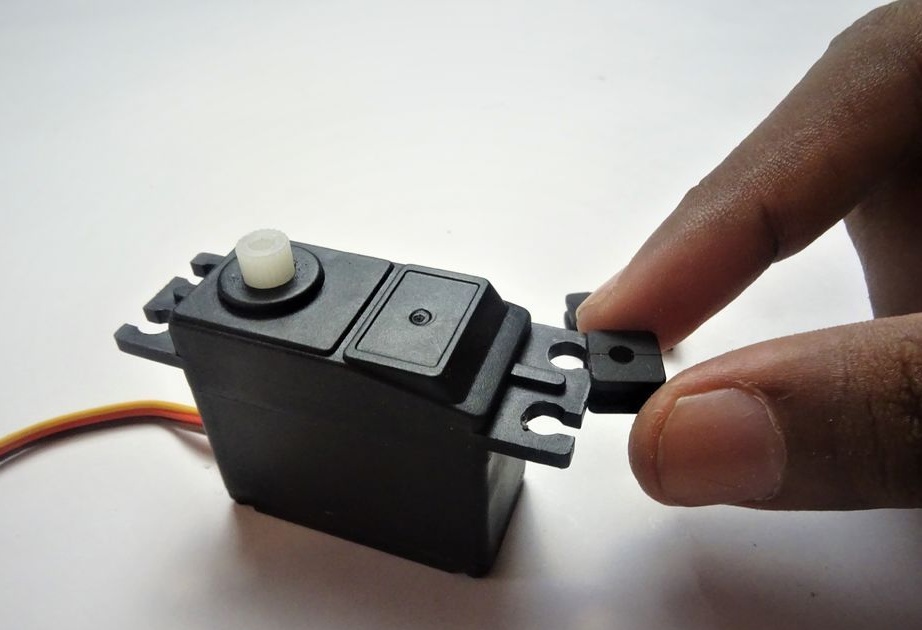
Η περιστροφή των βιδών του τροχού θα γίνει με τη βοήθεια ενός σερβομηχανισμού.
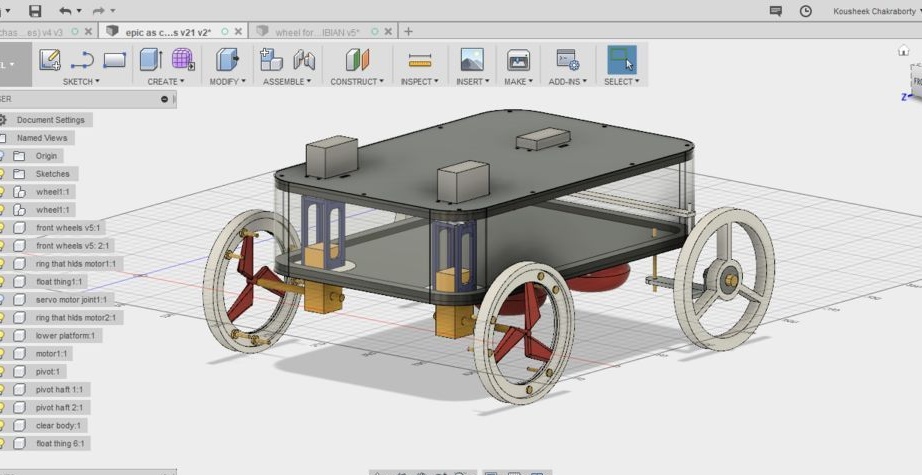
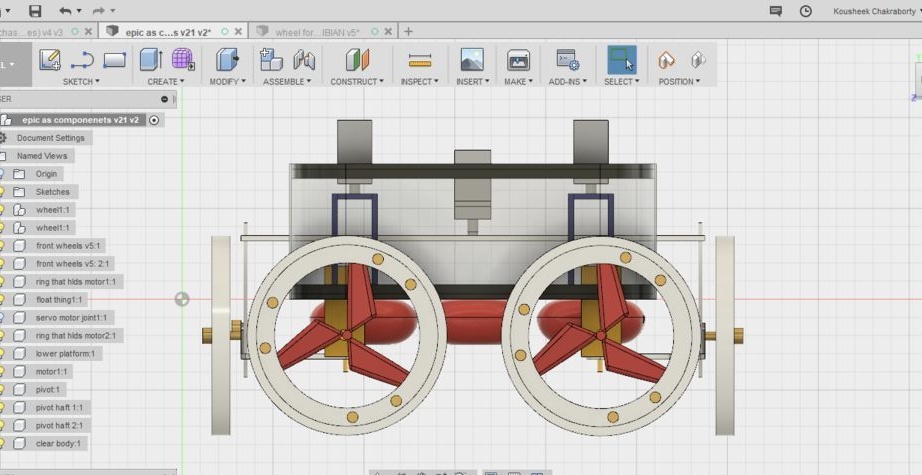
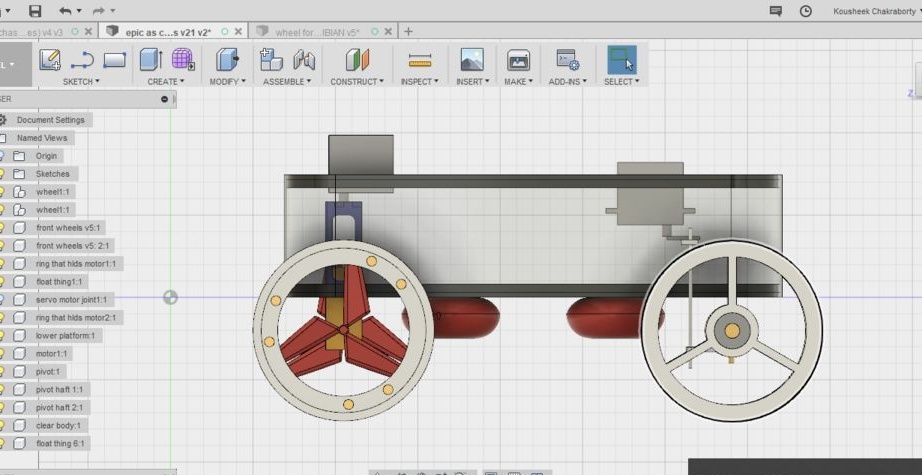
Το όχημα παντός εδάφους διαθέτει δύο μηχανισμούς περιστροφής. Ένας για να ελέγχει τους πίσω τροχούς των έλικων στο νερό, και ο δεύτερος, για να οδηγεί στη γη, ελέγχει τους μπροστινούς τροχούς. Η γωνία περιστροφής των εμπρός τροχών είναι 35 μοίρες, η οποία σας επιτρέπει να κάνετε αιχμηρές στροφές.
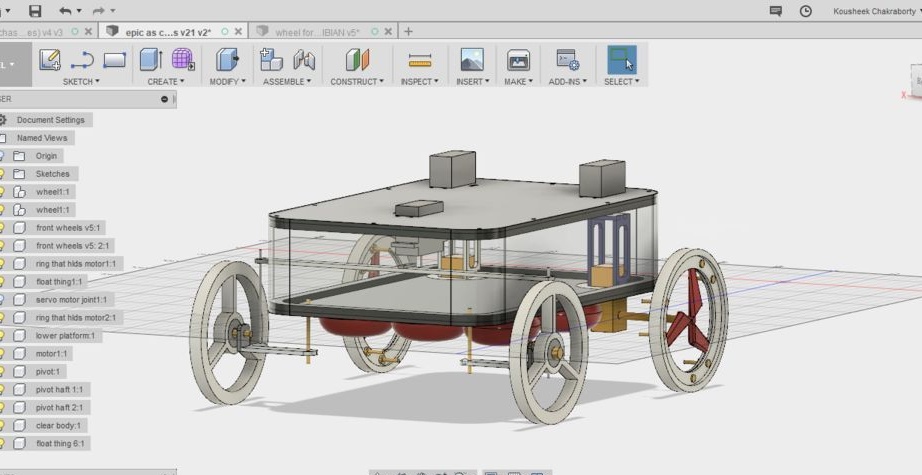
Στις παρακάτω εικόνες μπορείτε να δείτε τη μετατροπή του οχήματος όλου του εδάφους όταν μετακινείτε μέσα από το έδαφος και το νερό.
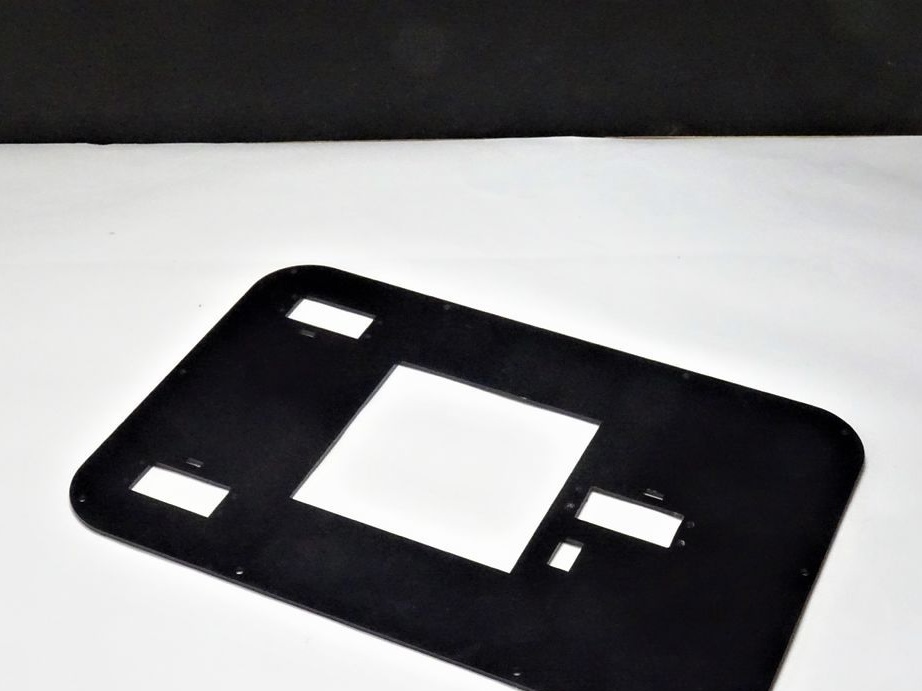
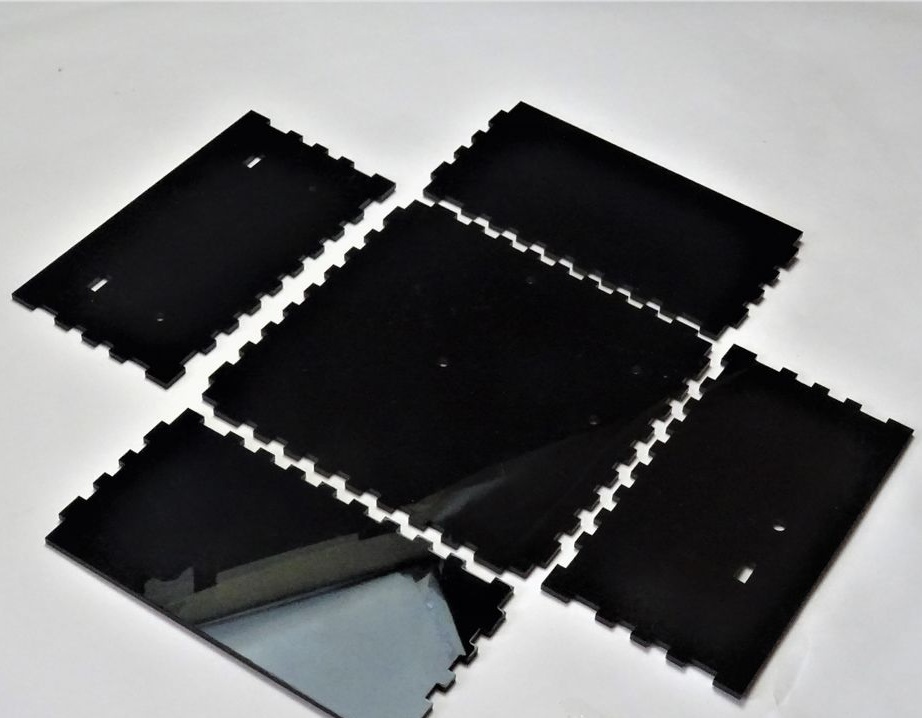
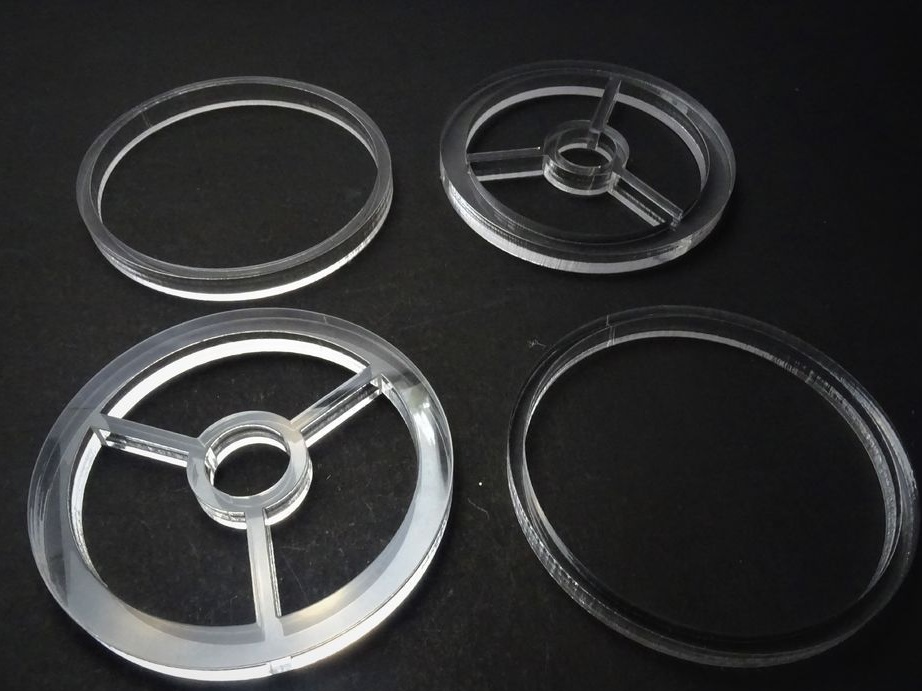
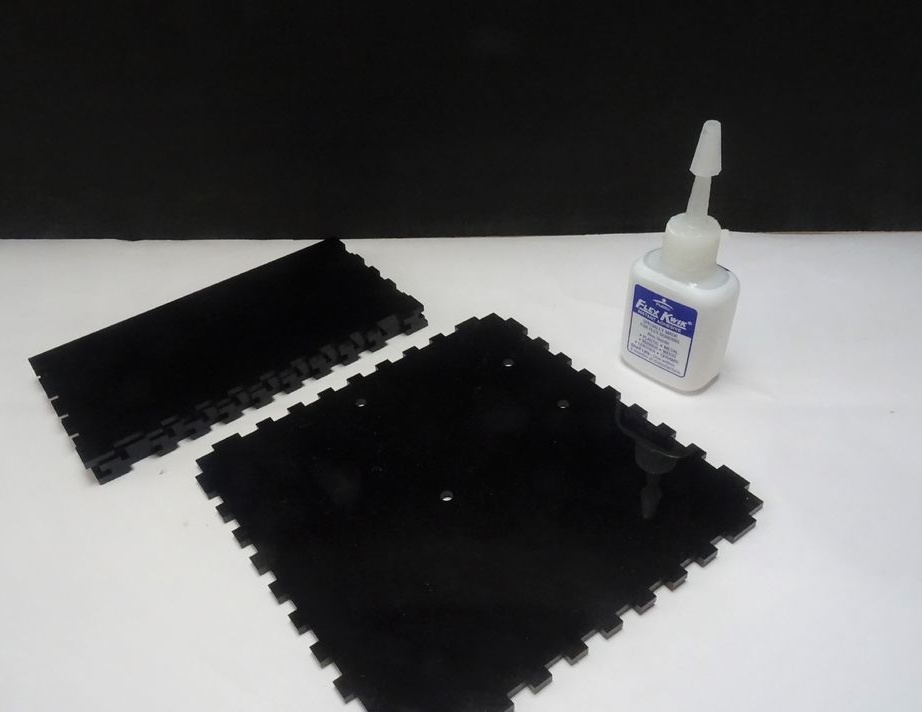
Βήμα δεύτερο: Κοπή λέιζερ
Για το όχημα παντός εδάφους, ο πλοίαρχος χρησιμοποίησε ακρυλικό με διαφορετικά πάχη και χρώματα.
Μαύρη επίστρωση 3 mm x 1
Κάτω στρώμα μαύρο 3 mm x 1
Μαύρο πλαϊνό πλαίσιο 5 mm x 2
Διαφανές πλευρικό τοίχωμα 2 mm x 1
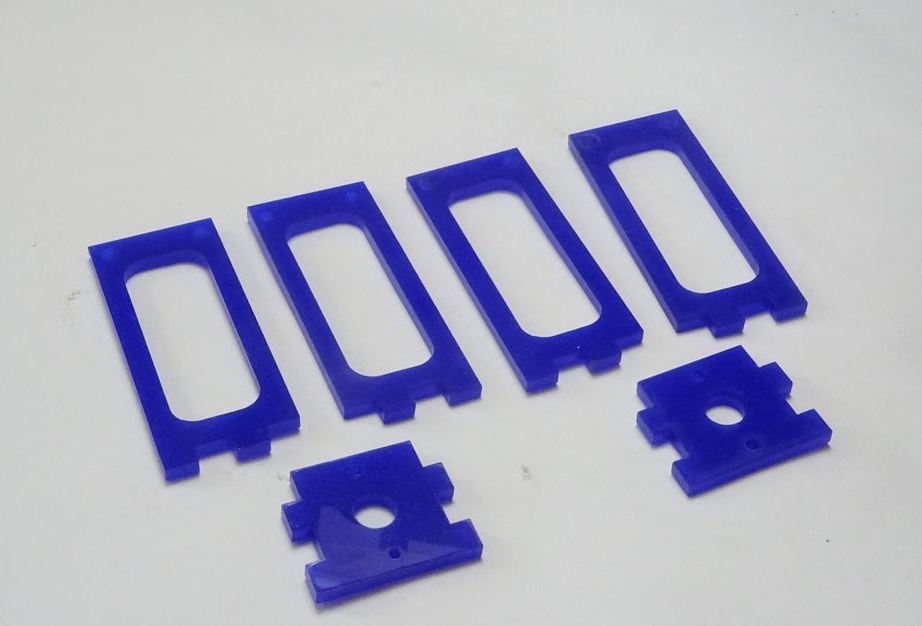
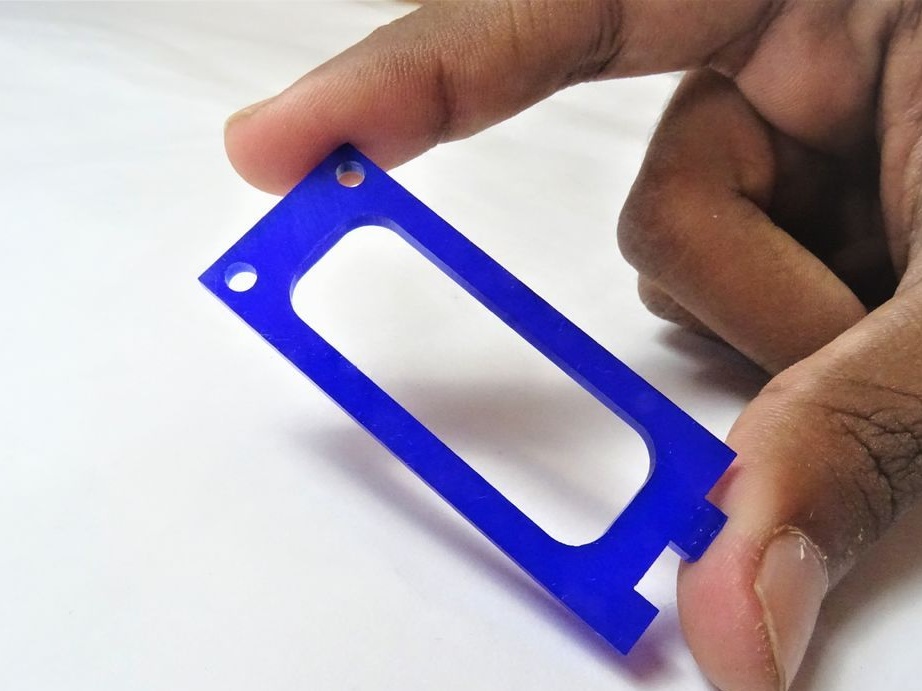
Ισχύς μπλε 3 mm x 4
Γέφυρα Κομμάτι Μπλε 3 mm x 2
Μηχανισμός DisK Λευκό 3 mm x 2
Μπροστινό τροχό λευκό 10 mm x 2
Εσωτερική ζάντα (πίσω τροχός) Λευκό 3 mm x 4
Εξωτερικό χείλος (πίσω τροχός) Λευκό 10 mm x 2
Λευκό τιμόνι 3 mm x 1
Βάση συρταριού μαύρο 3 mm x 1
Κάλυμμα μαύρου διαμερίσματος 3 mm x 1
Πίσω άξονας κινητήρα Λευκό 3 mm x 2
Μπροστινό πλαίσιο λευκό 5 mm x 2



Μπορείτε να κατεβάσετε το αρχείο του CNC από τη σύνδεση.
Λέιζερ κοπής Rover Parts.zip
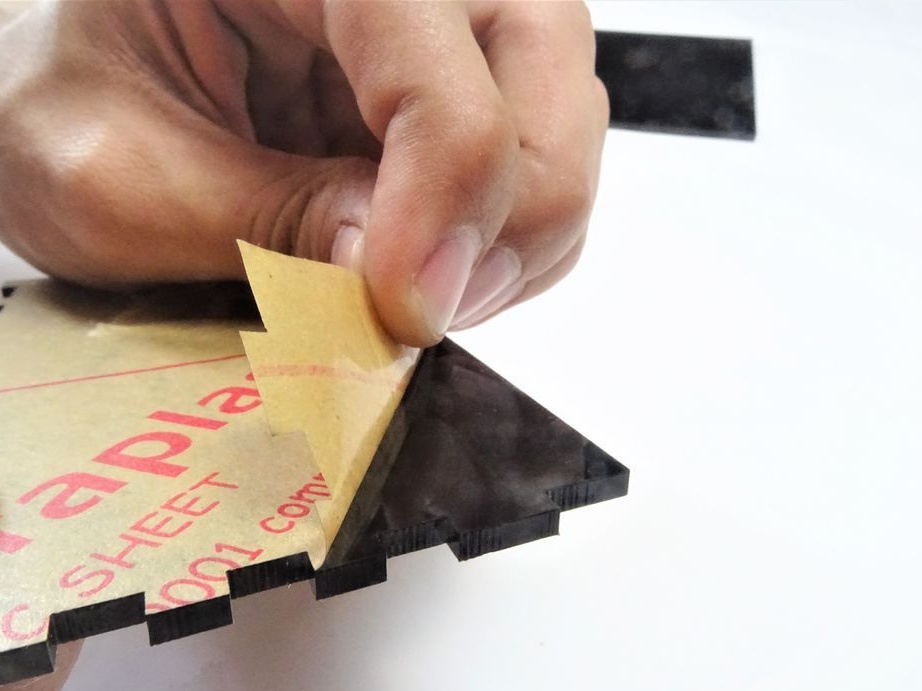
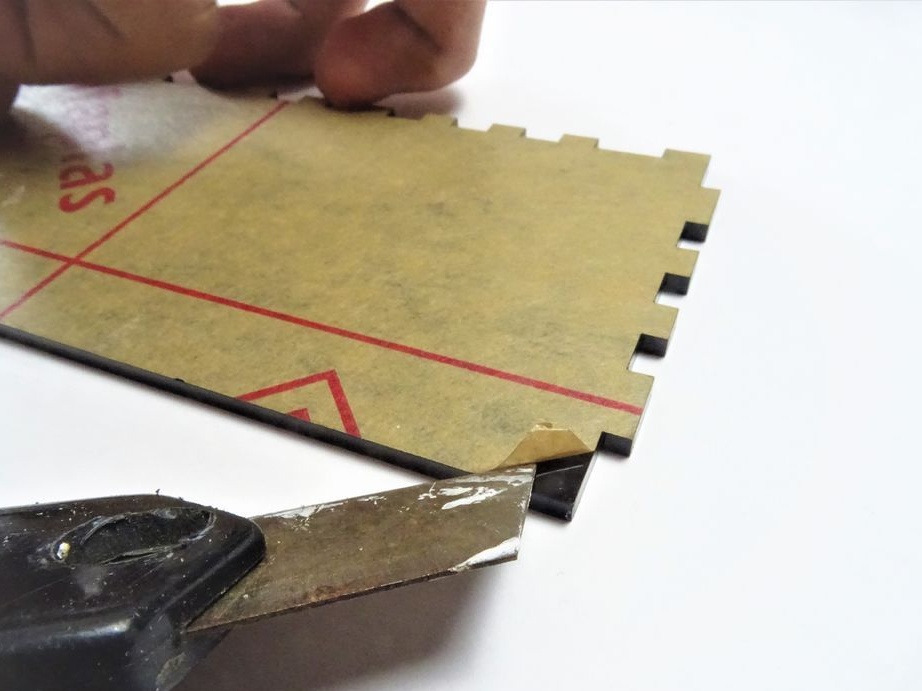
Μετά την κατασκευή των εξαρτημάτων, αφαιρεί το προστατευτικό στρώμα από αυτά.
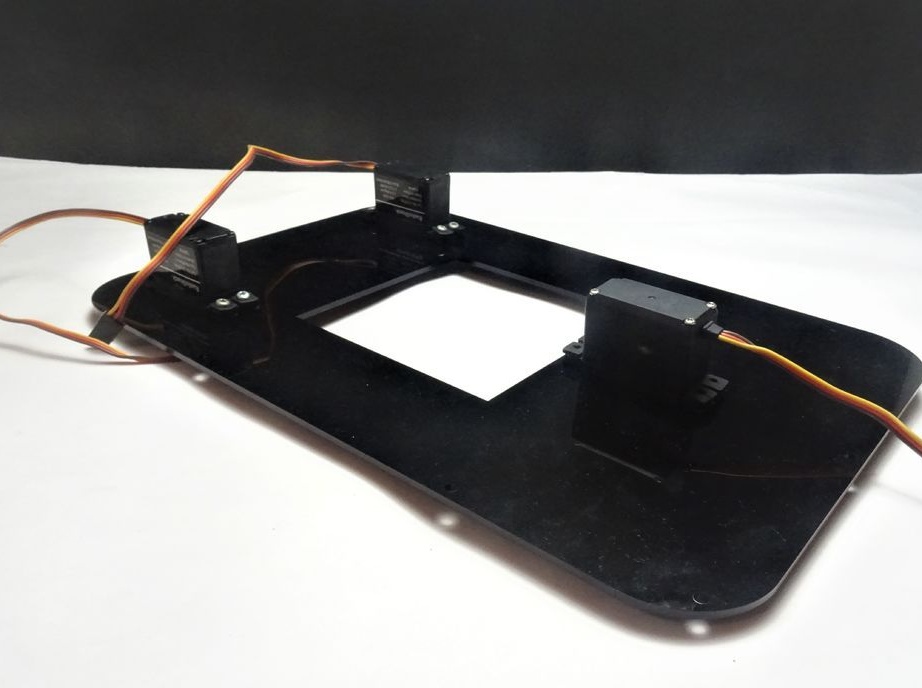
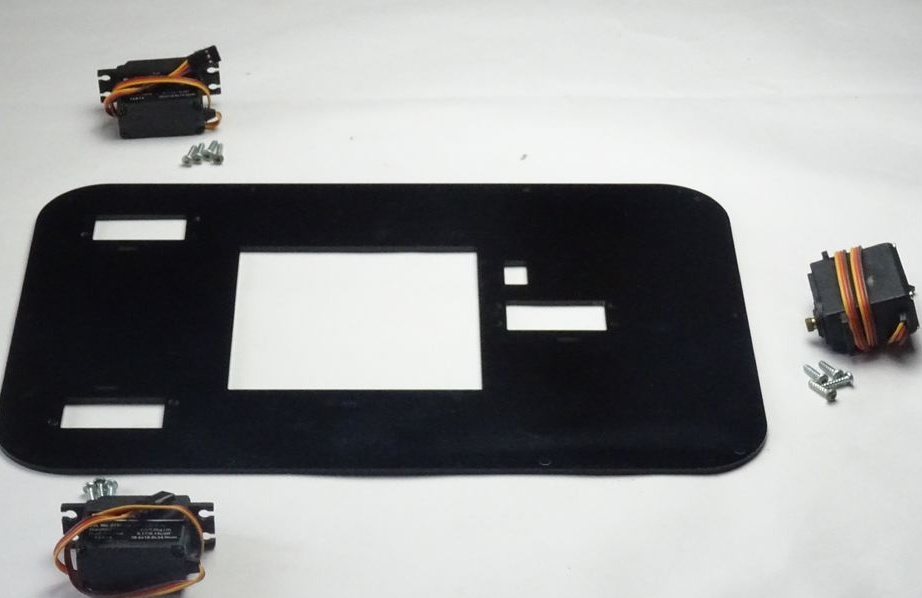
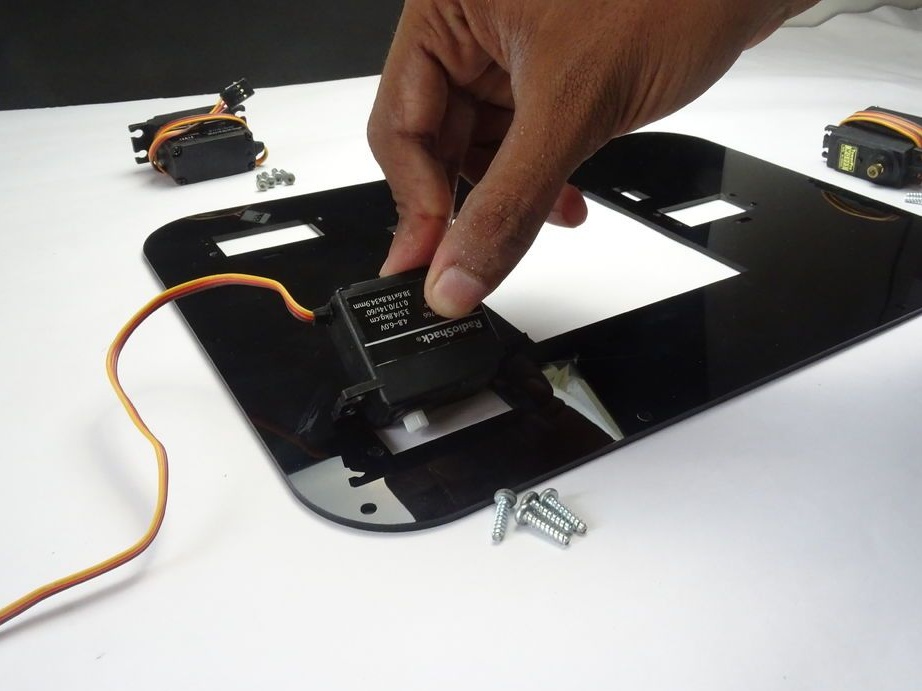
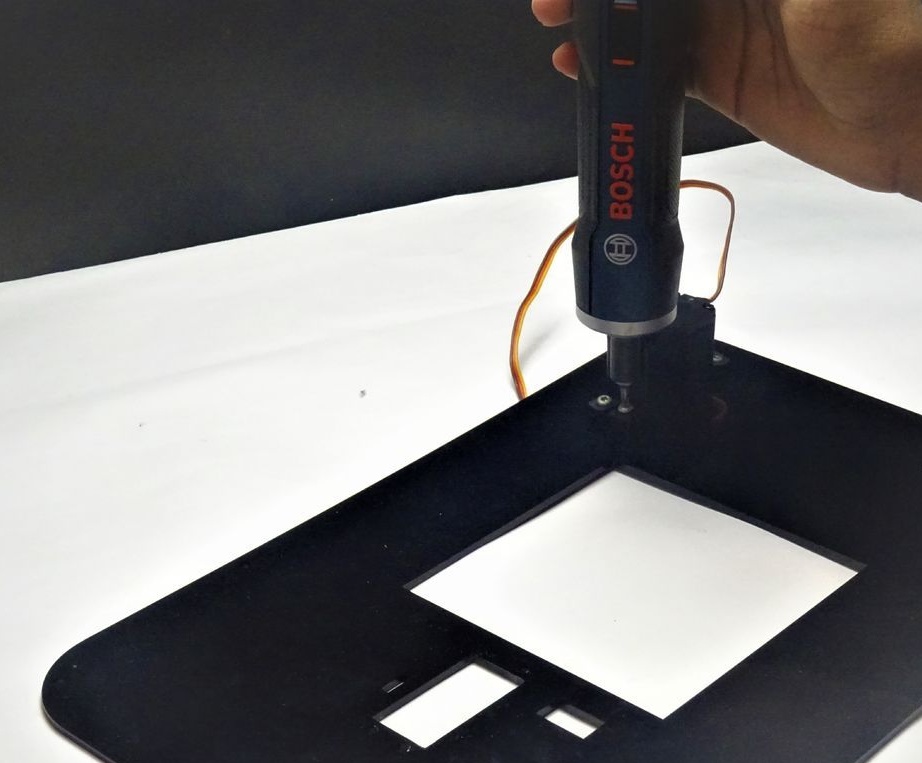
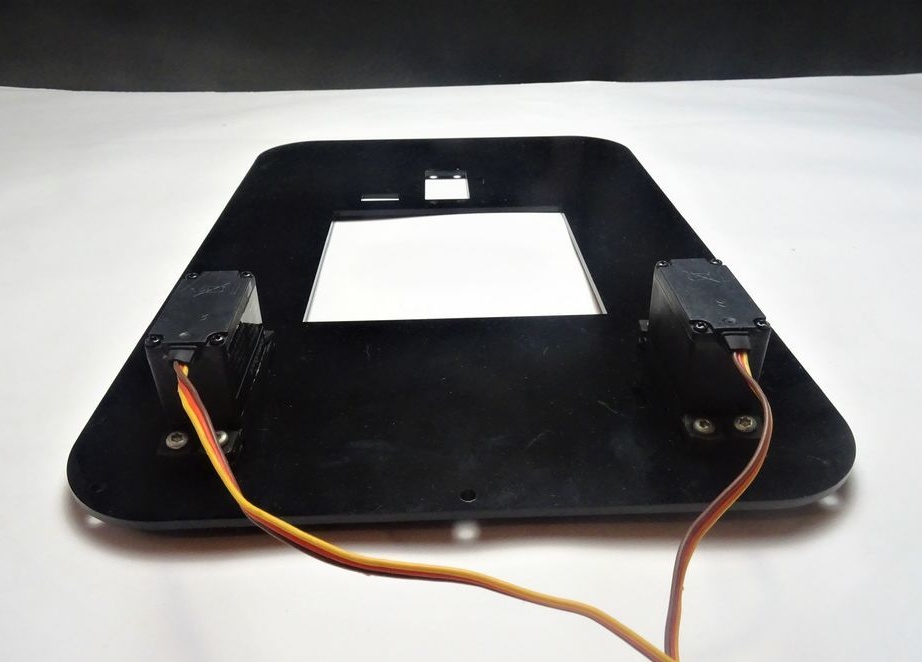
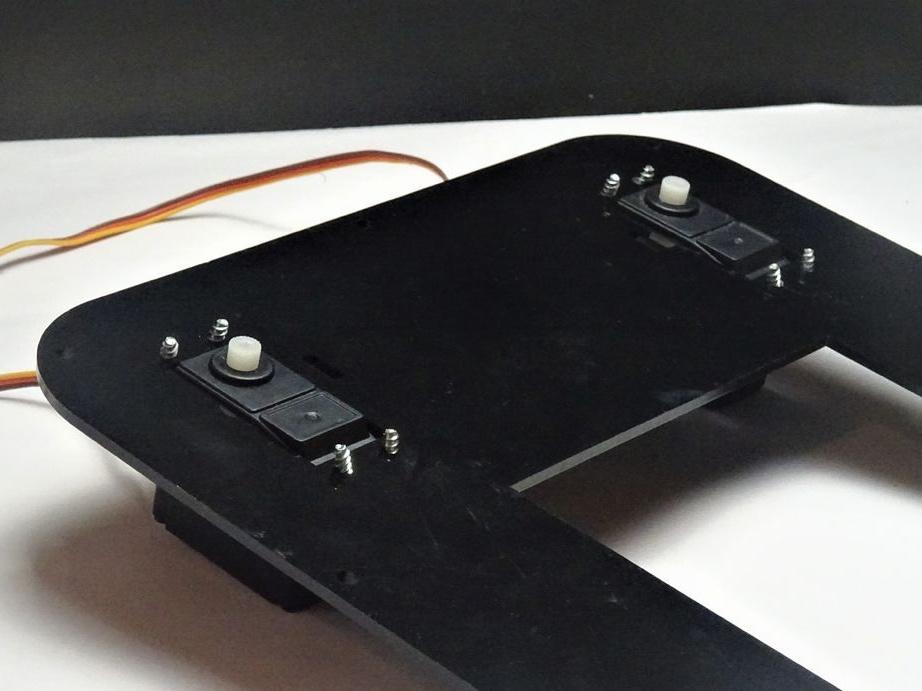
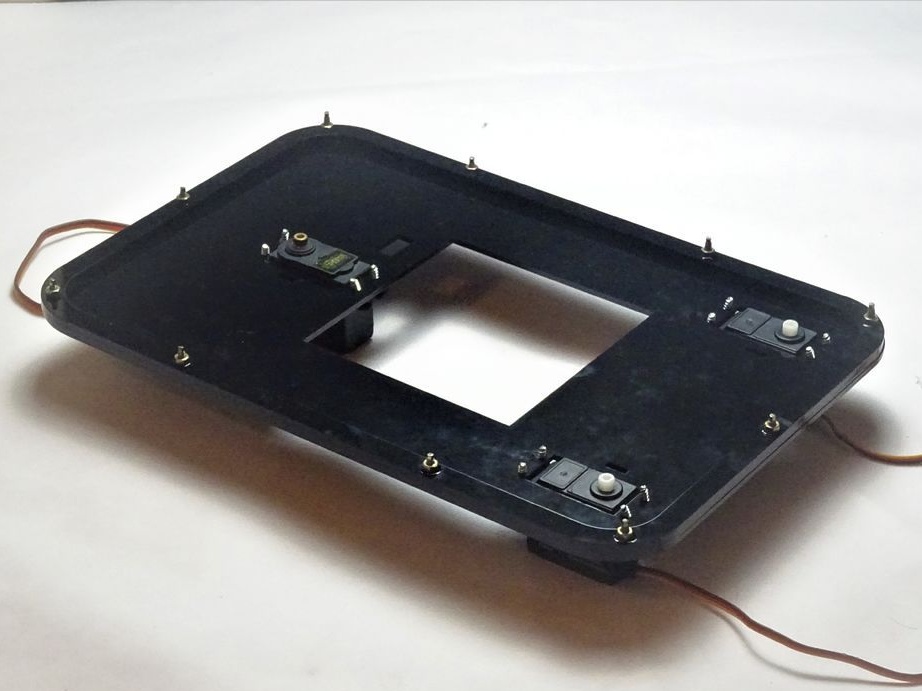
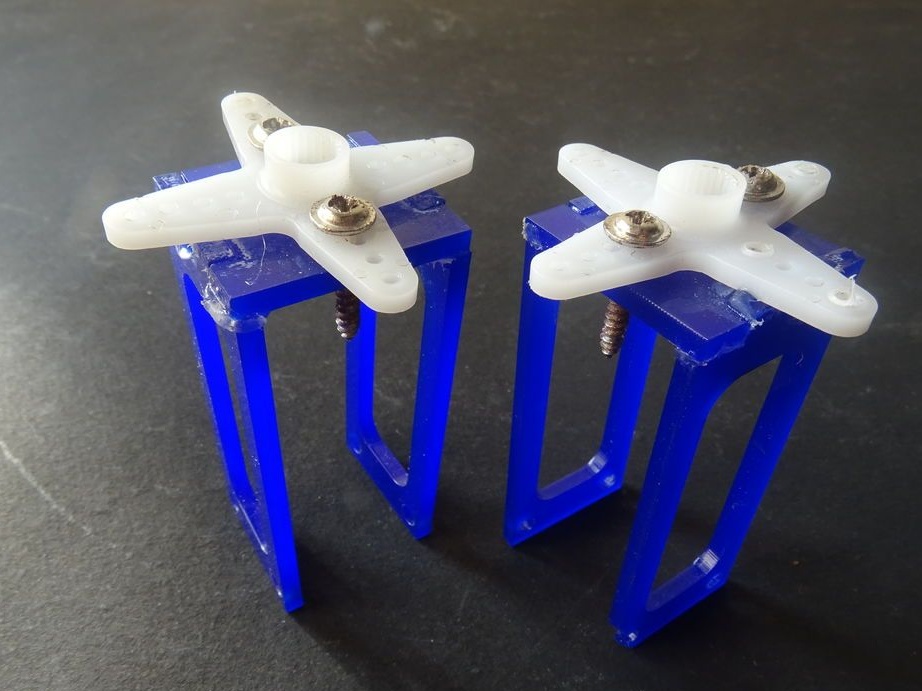
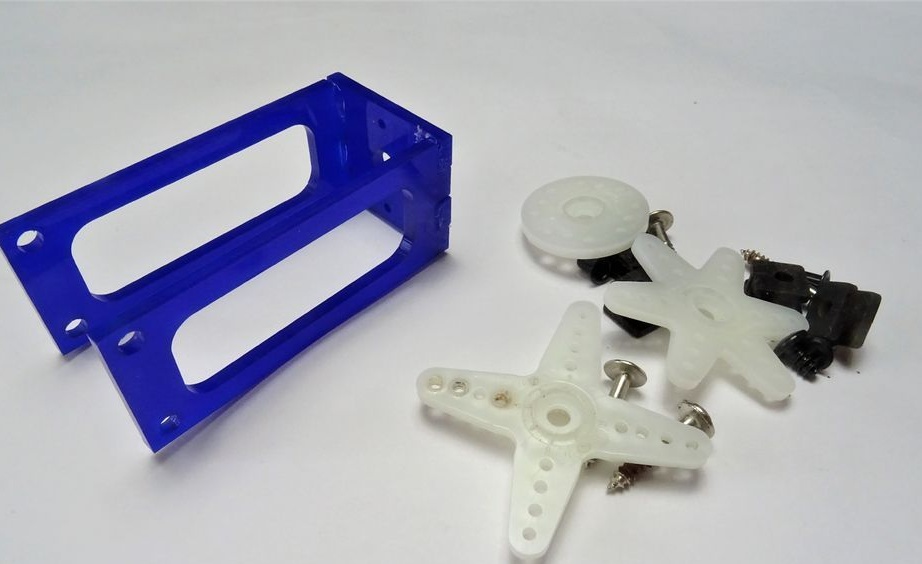
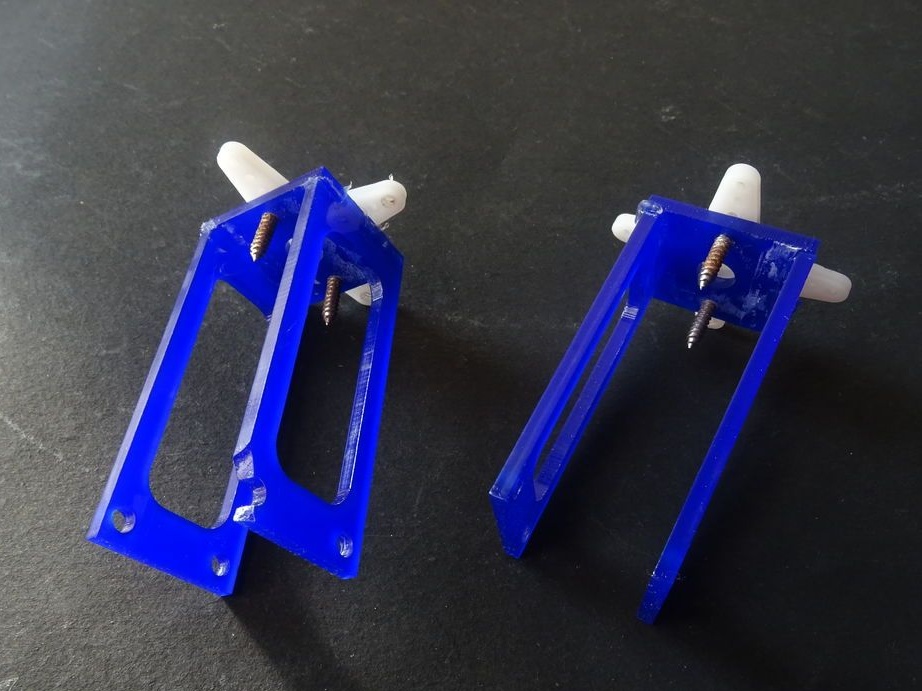
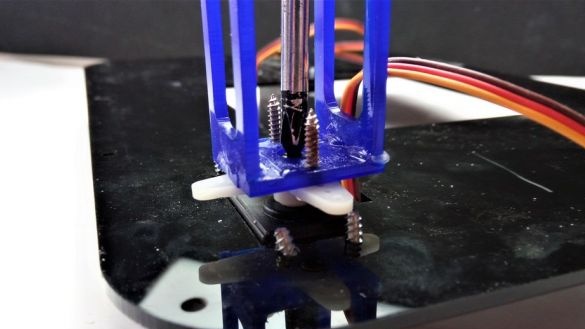
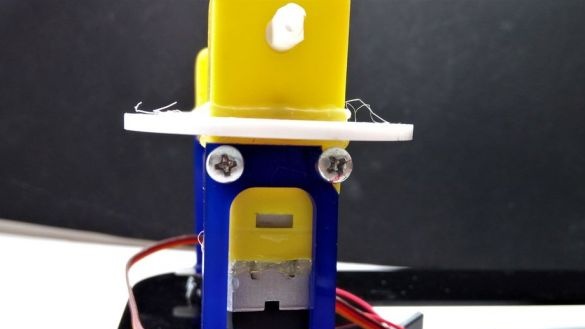
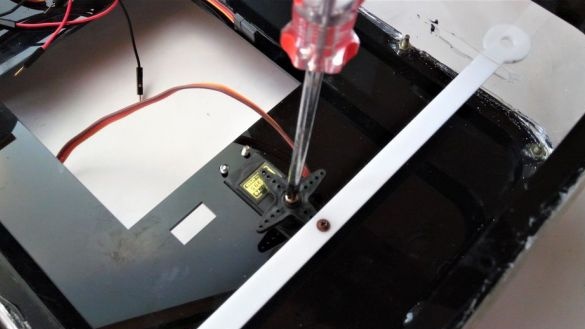
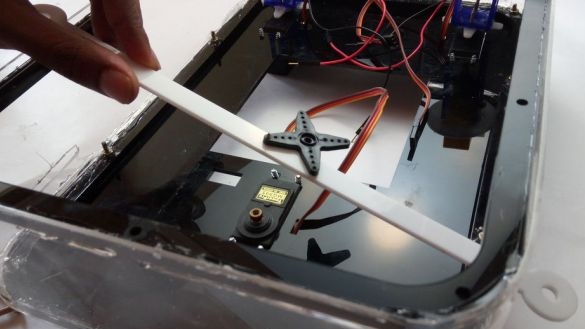
Βήμα τρίτο: Εγκατάσταση σερβοκινητήρων
Και οι τρεις σερβοκινητήρες είναι βιδωμένοι στην πλατφόρμα. Δύο στην πλάτη και ένα μπροστά.

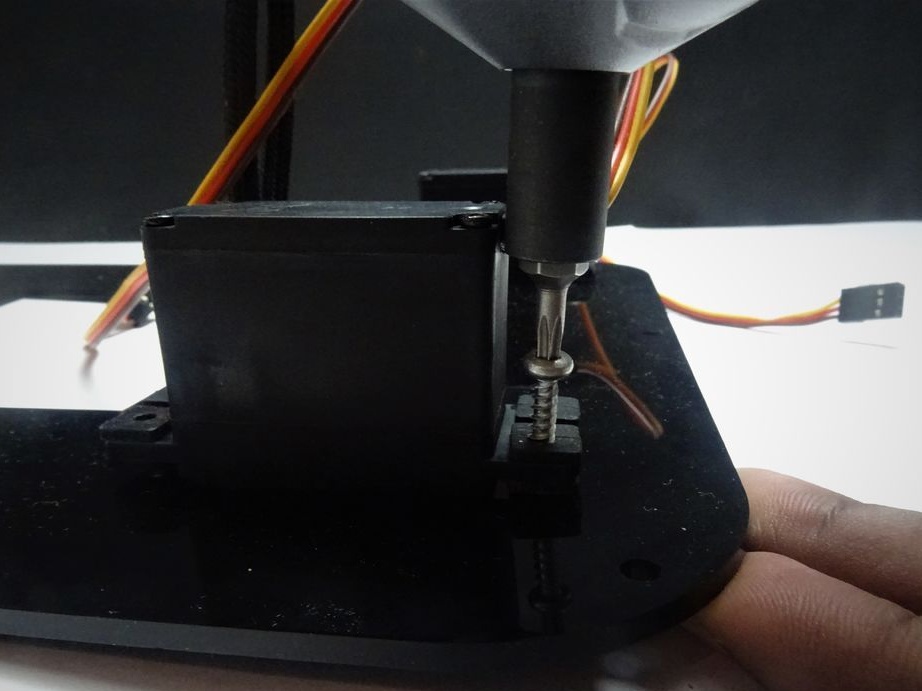
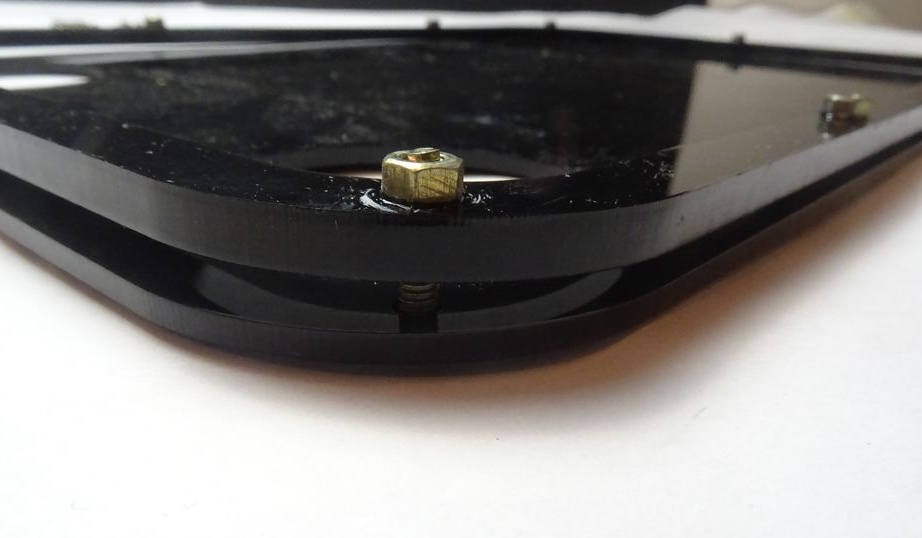
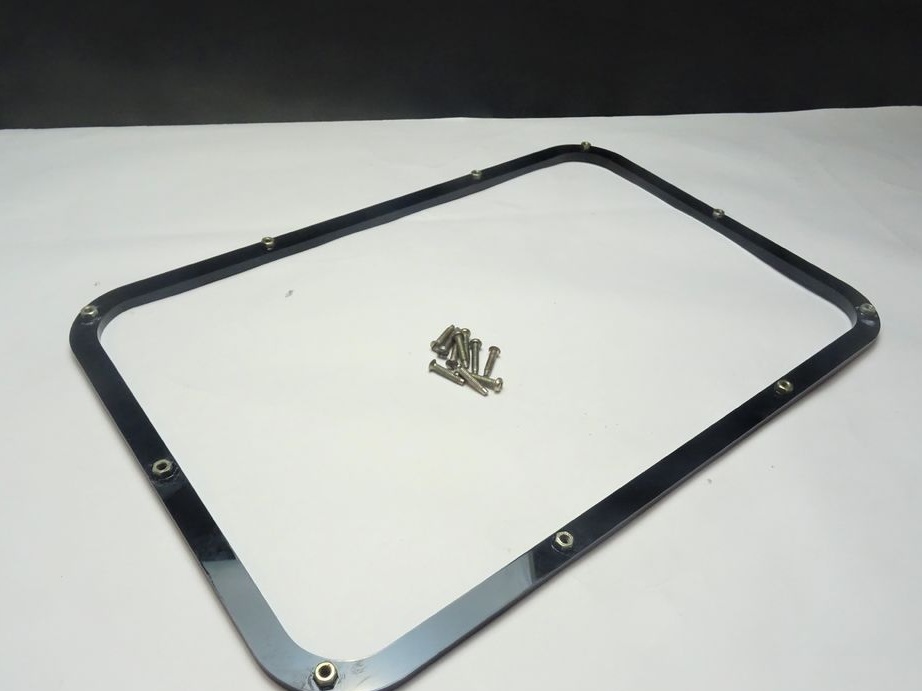
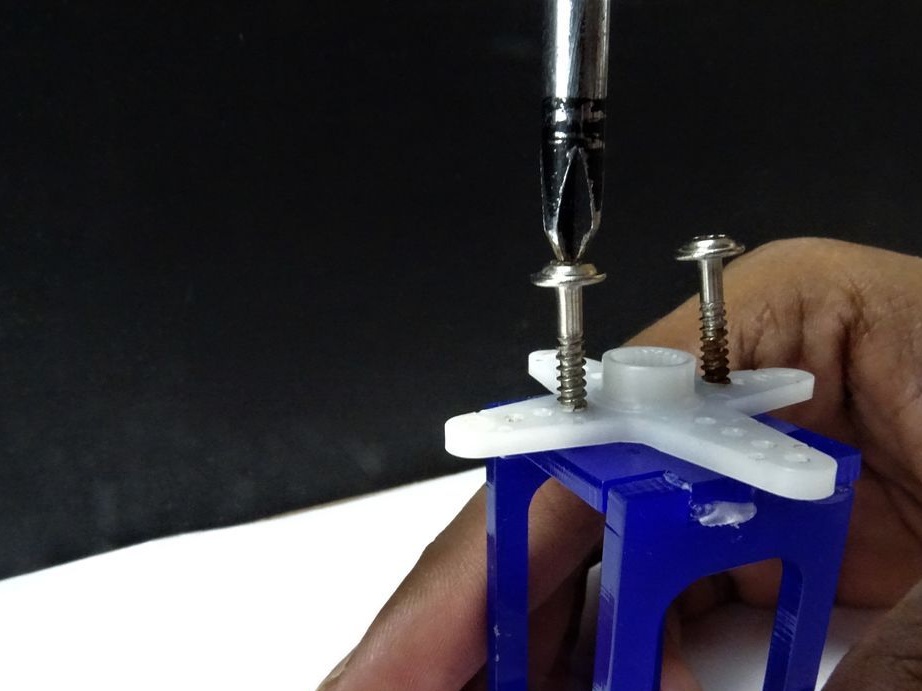
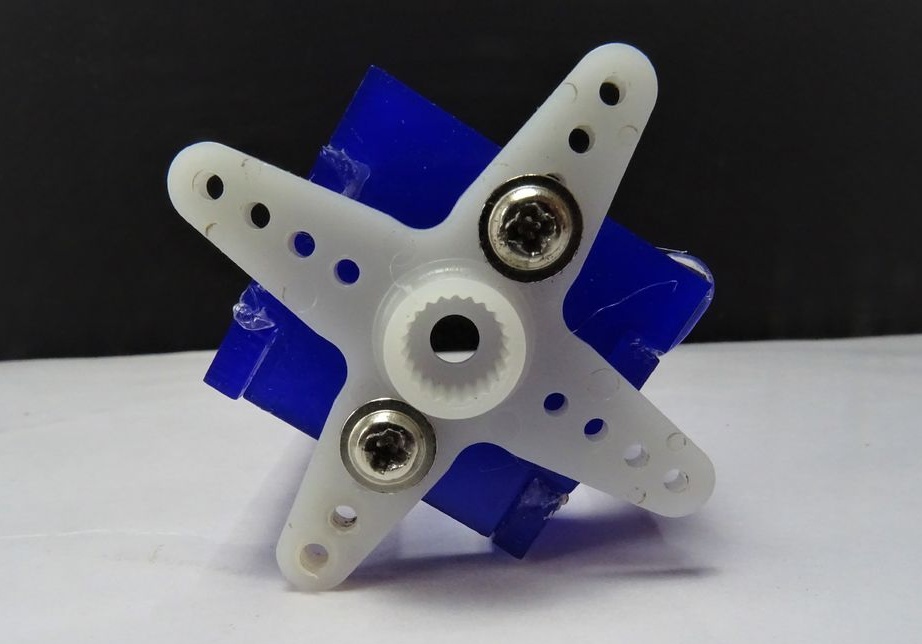
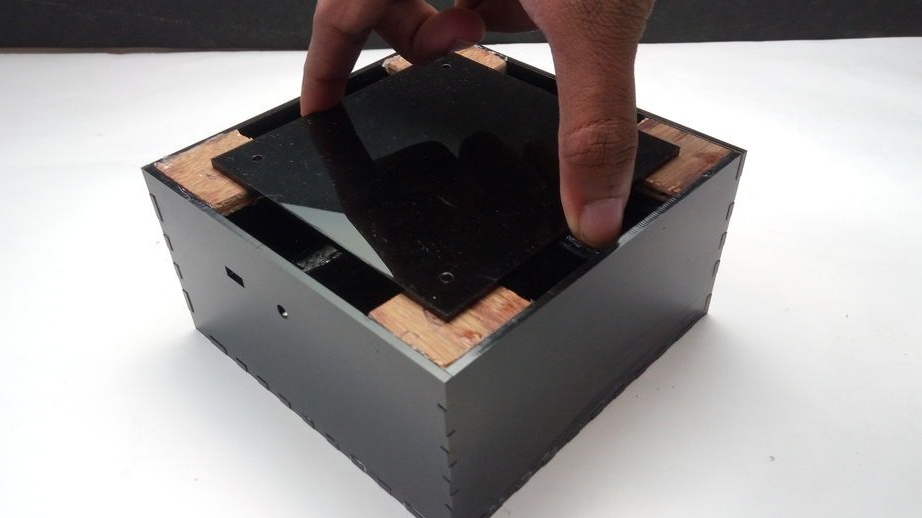
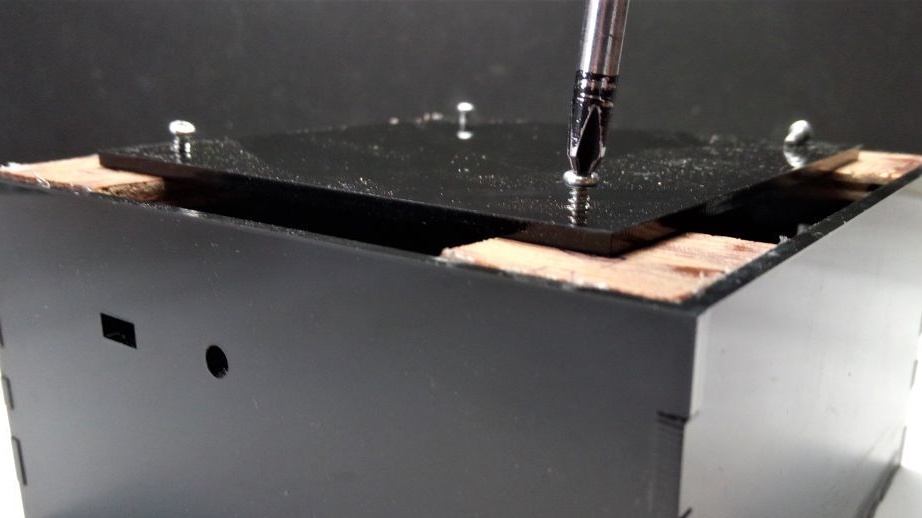
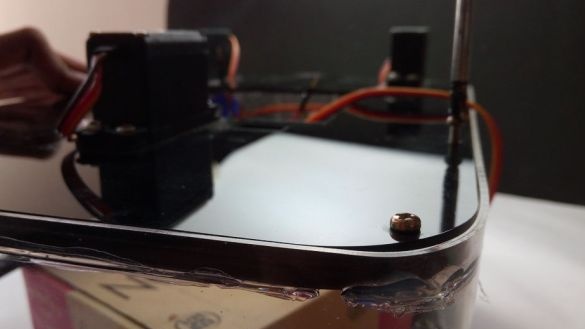
Βήμα τέσσερα: Ξηροί καρποί
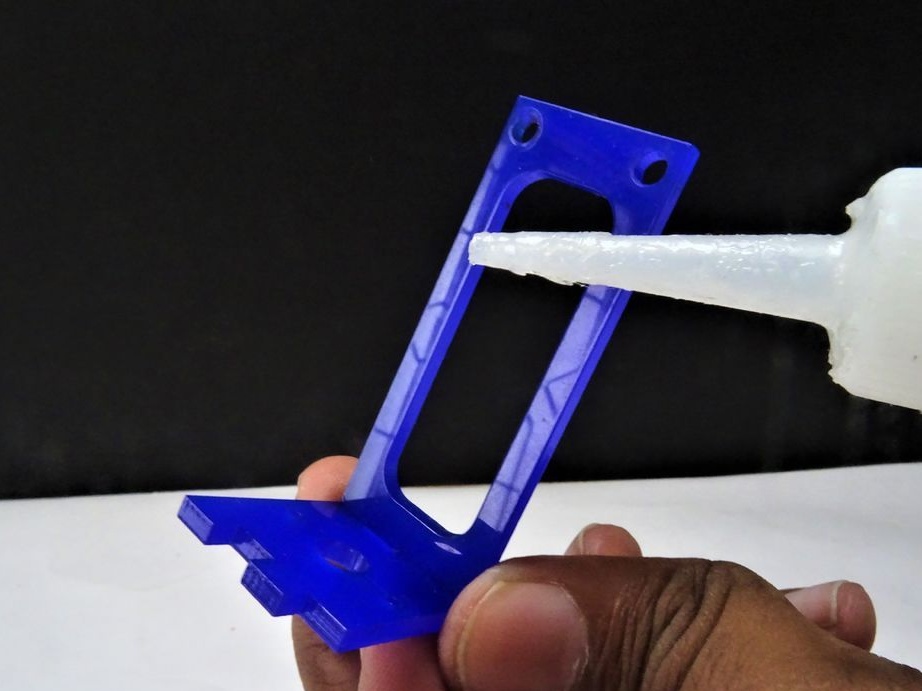
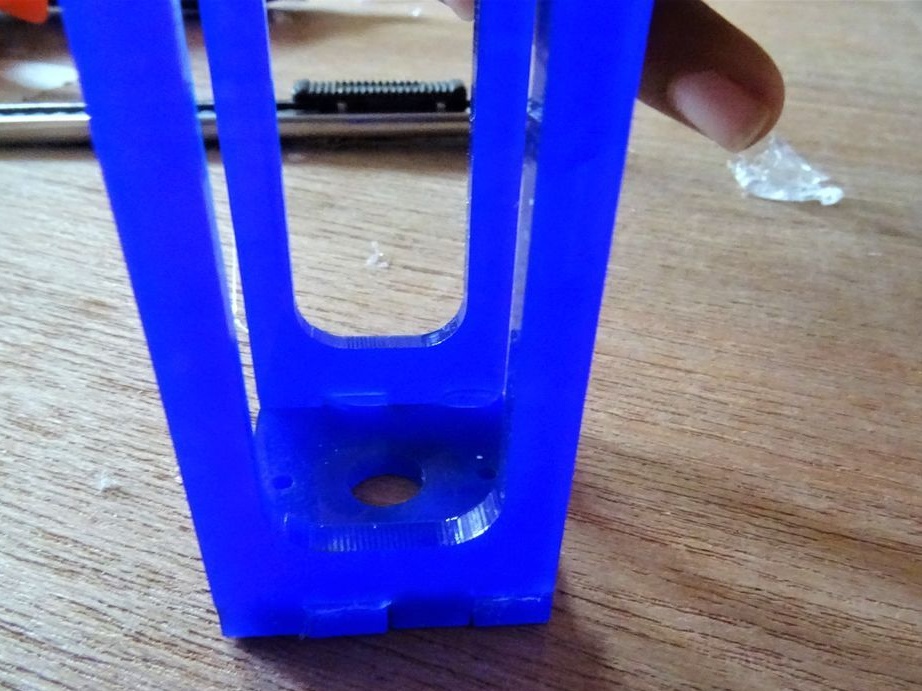
Για πρόσβαση στους μηχανισμούς, το πάνω και το κάτω μέρος είναι βιδωμένα μεταξύ τους. Κόβει τα καρύδια στο στρώμα πάνω στο πλαίσιο και στη συνέχεια ενισχύει το με εποξείδιο.

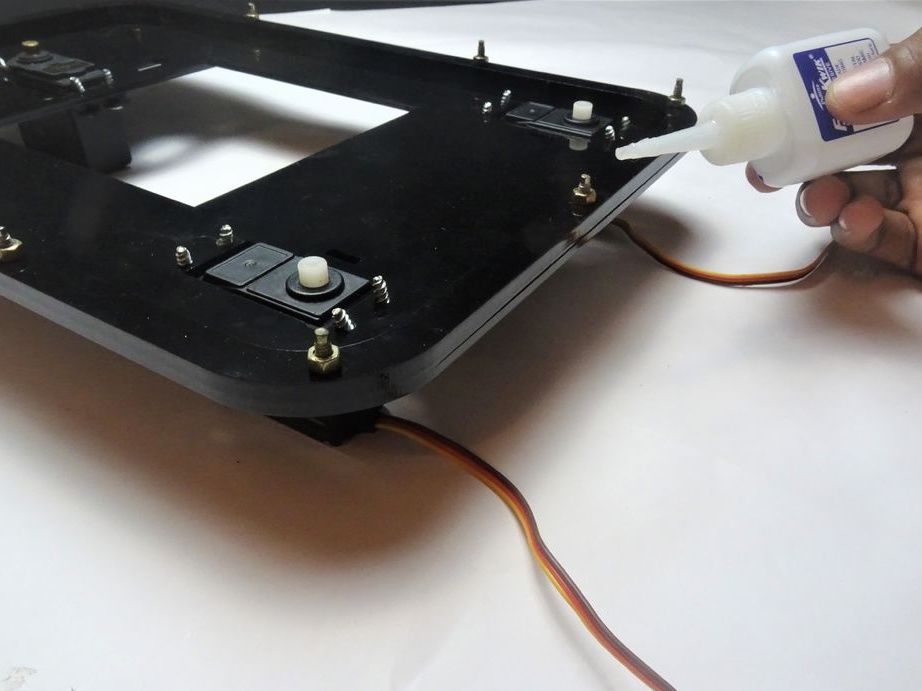

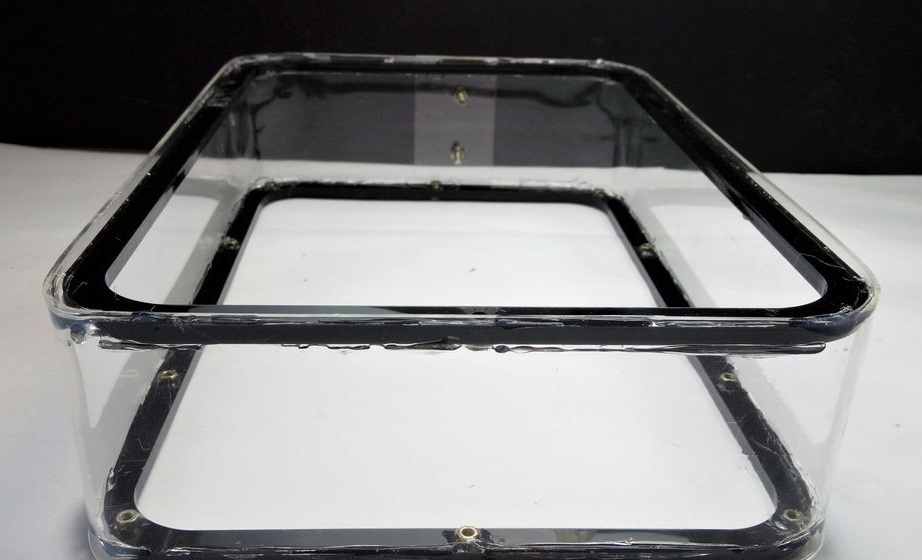
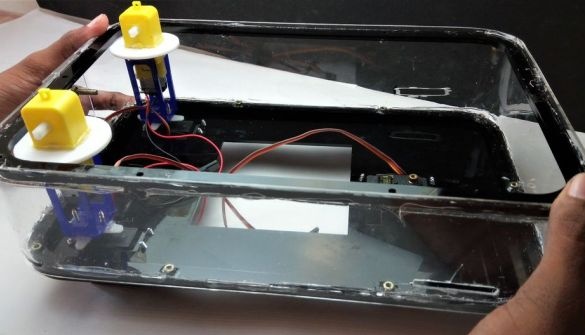
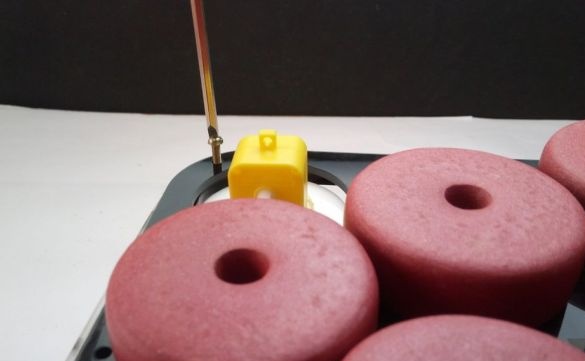
Βήμα πέντε: Πλωτήρες
Κόλλα κόλλα.



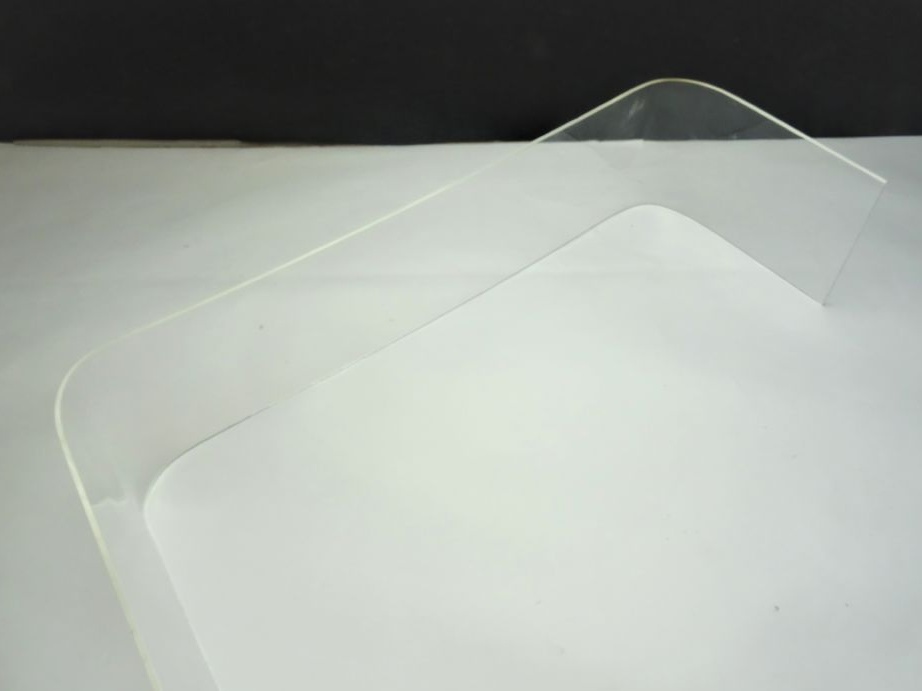
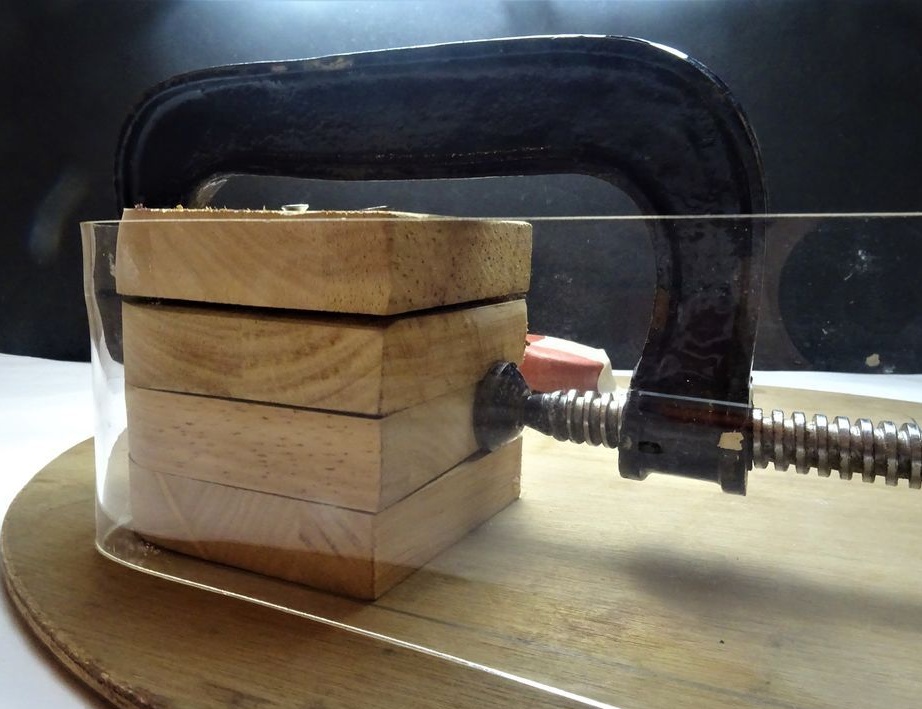
Βήμα έξι: Διαμόρφωση ακρυλικού
Για να λυγίσει το ακρυλικό, ένας τεχνίτης κάνει ένα πρότυπο από ξύλο.



Σφίγγει το τμήμα με ένα σφιγκτήρα και, με θέρμανση με στεγνωτήρα μαλλιών, δίνει το κομμάτι στο επιθυμητό σχήμα.





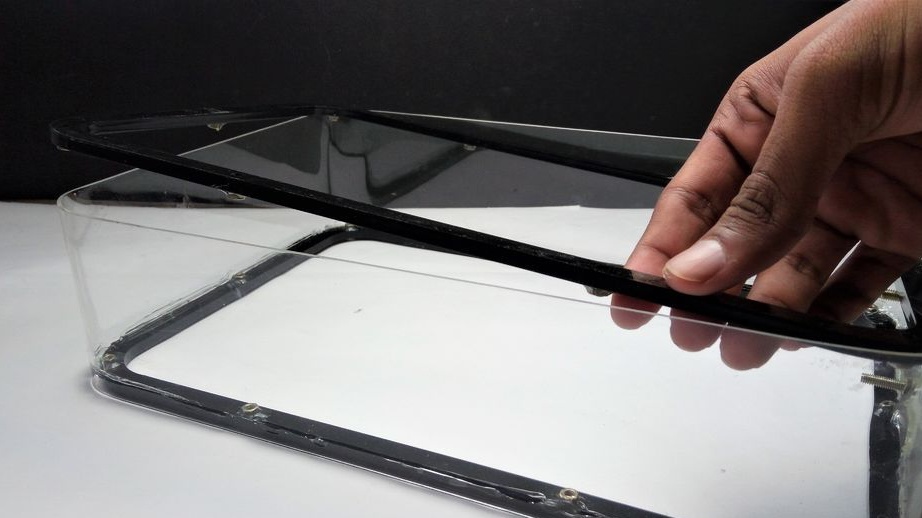
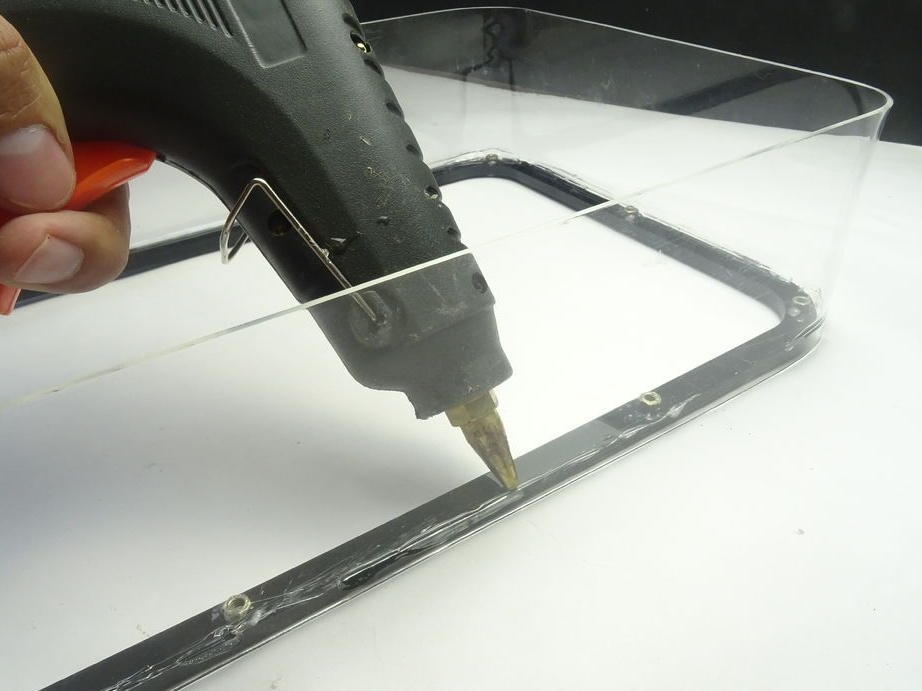
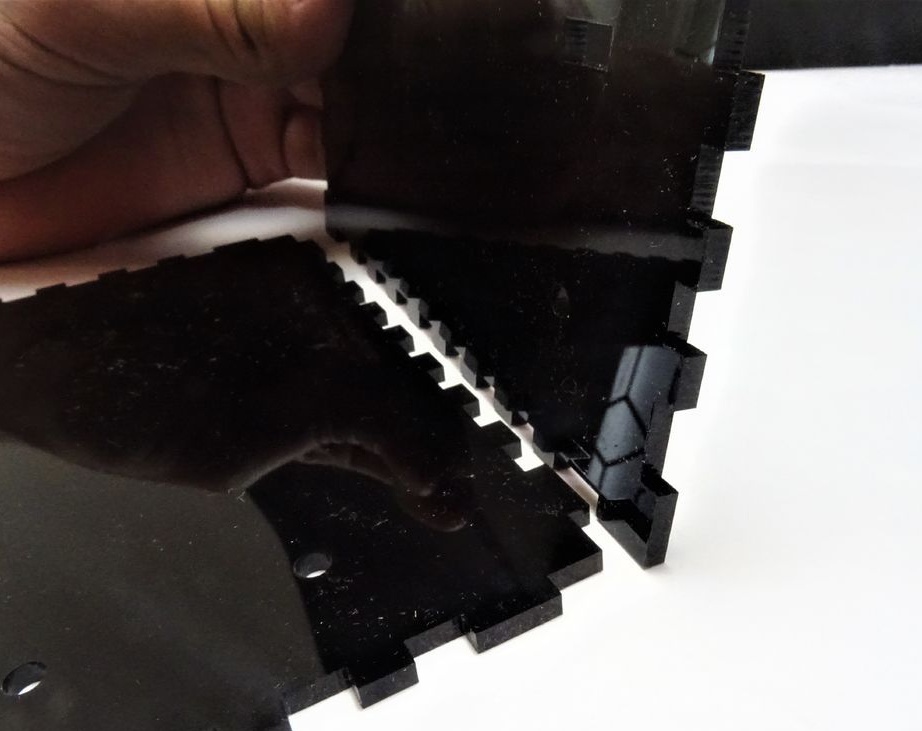
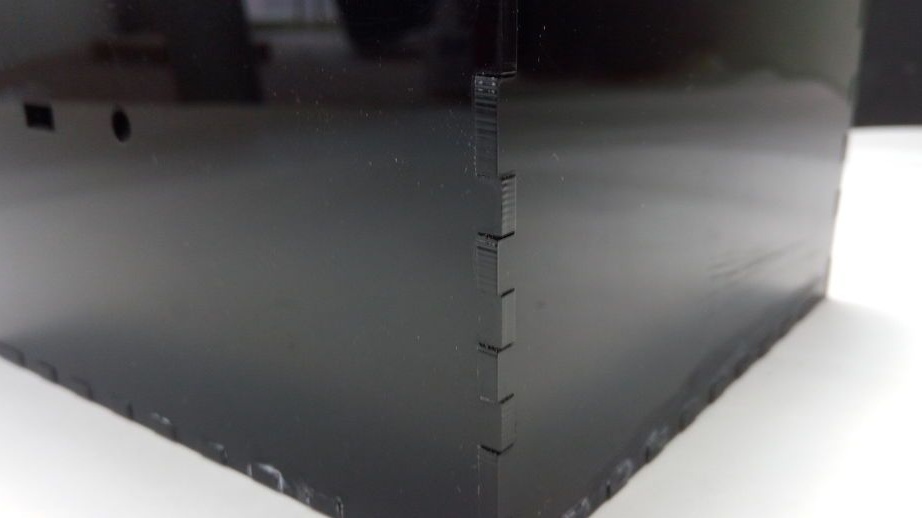
Έβδομο βήμα: πλαίσιο
Κόβει το πάνω και κάτω πλαίσιο στο διαφανές σώμα. Οι ραφές σφραγίζονται προσεκτικά με ζεστή κόλλα.







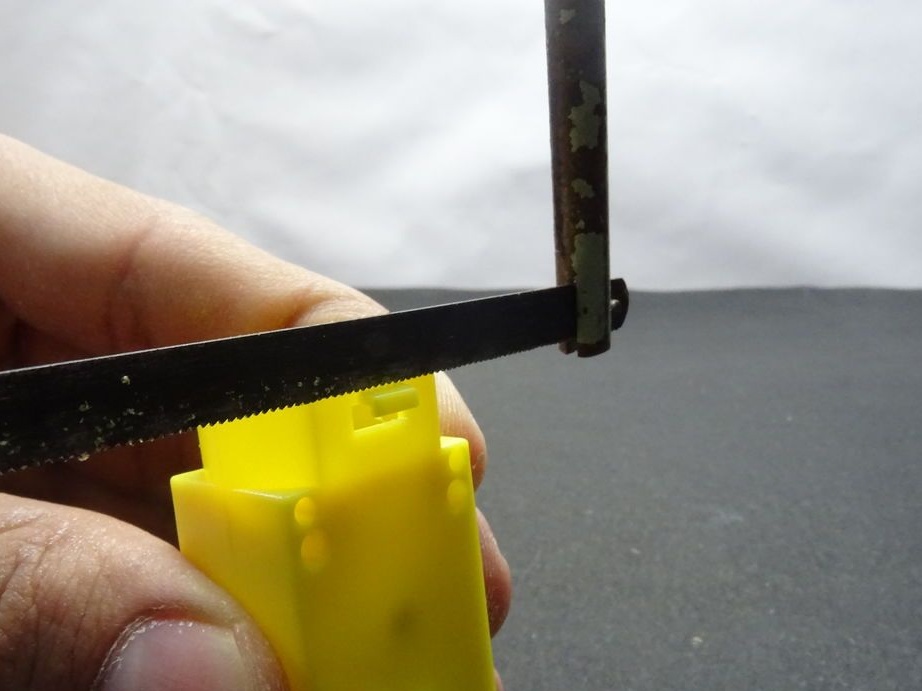
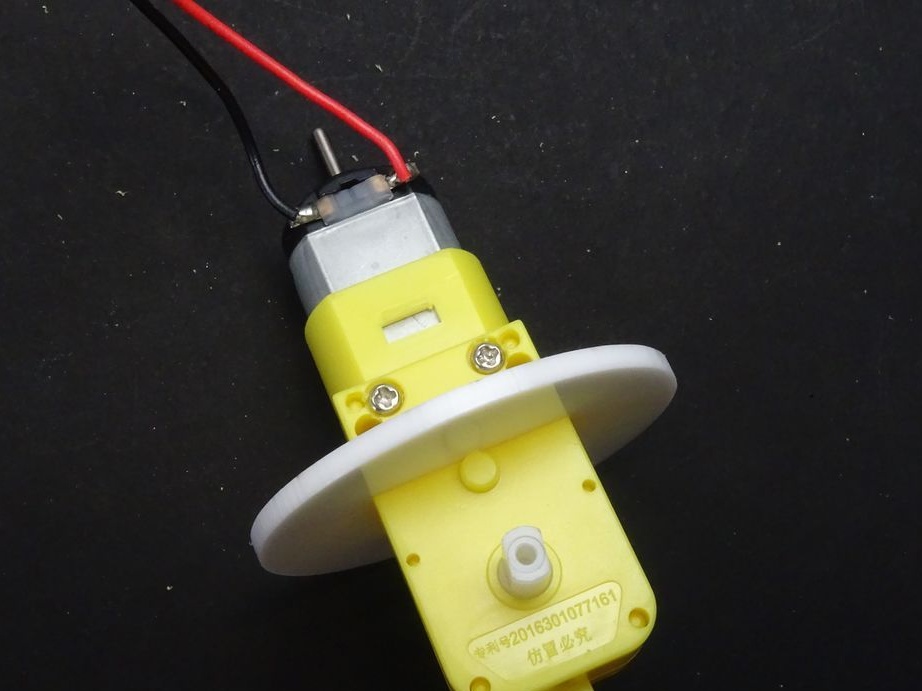
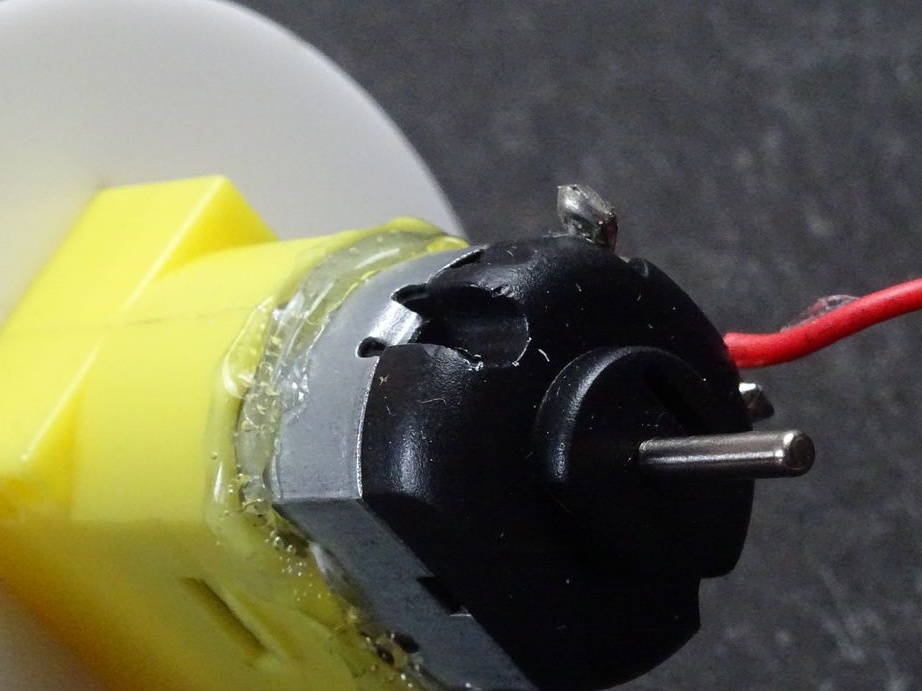
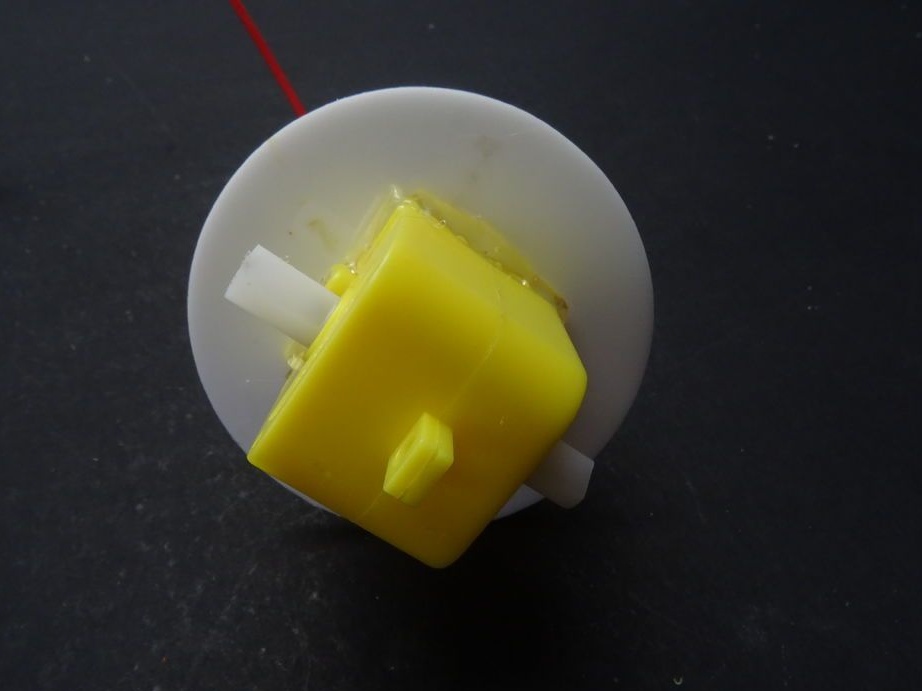
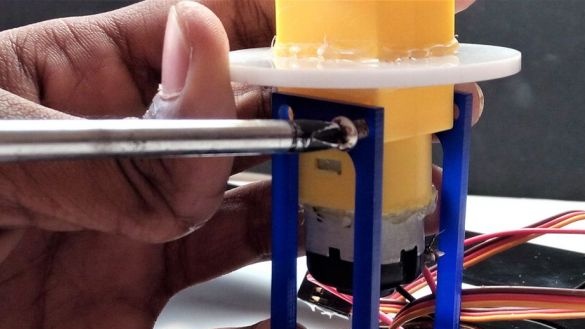
Βήμα Οκτώ: Ρύθμιση κινητήρα
Τώρα πρέπει να επεξεργαστείτε το περίβλημα του κινητήρα για να εγκαταστήσετε τμήματα πάνω του.

Κόβει όλα τα προεξέχοντα μέρη από το σώμα, μέχρι το αυτοκόλλητο.
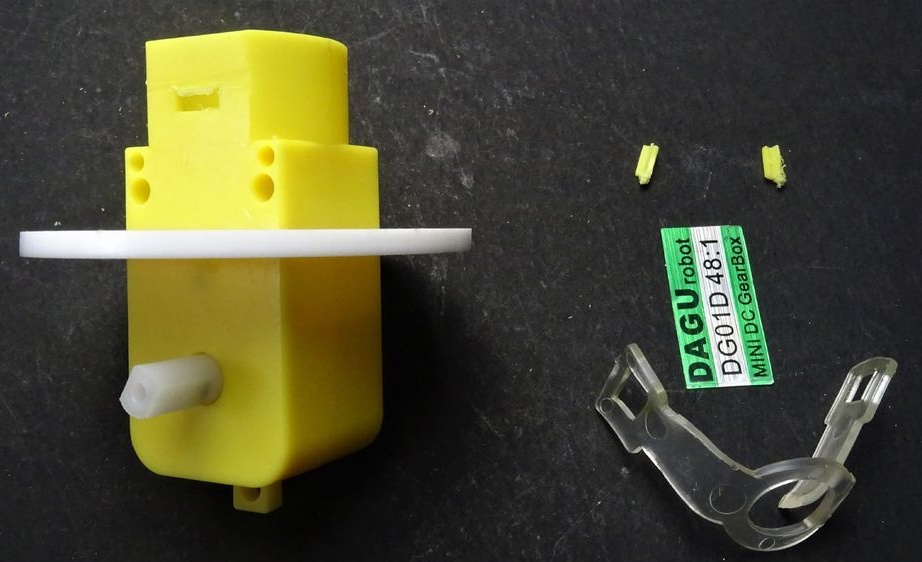

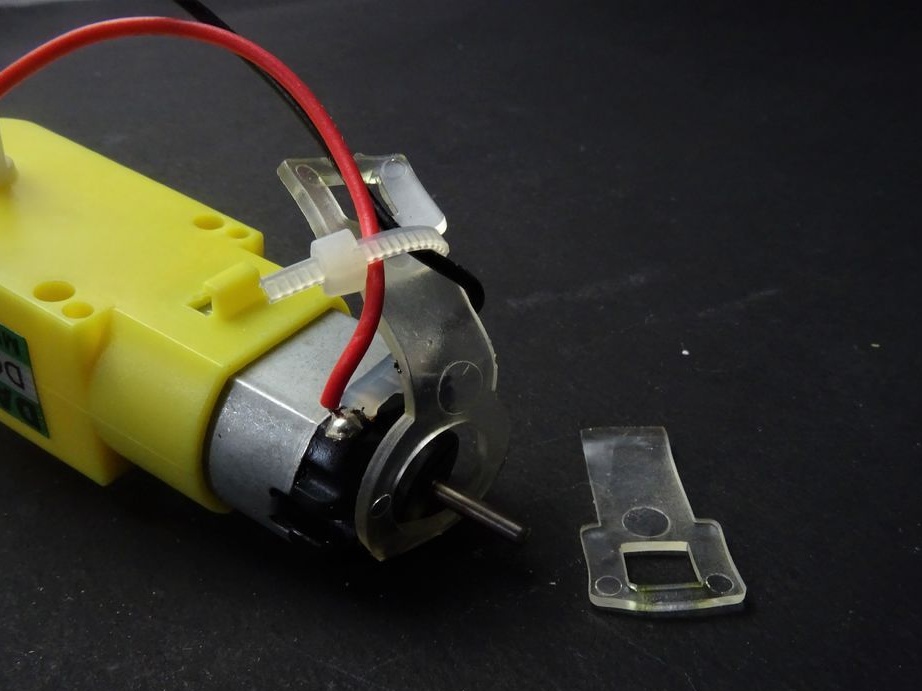


Τοποθετεί το μέρος στο σώμα και το κολλάει. Δεδομένου ότι ήταν απαραίτητο να αποκοπεί η βάση του κινητήρα (μάνταλα), ο κινητήρας επίσης στερεώνεται με κόλλα.

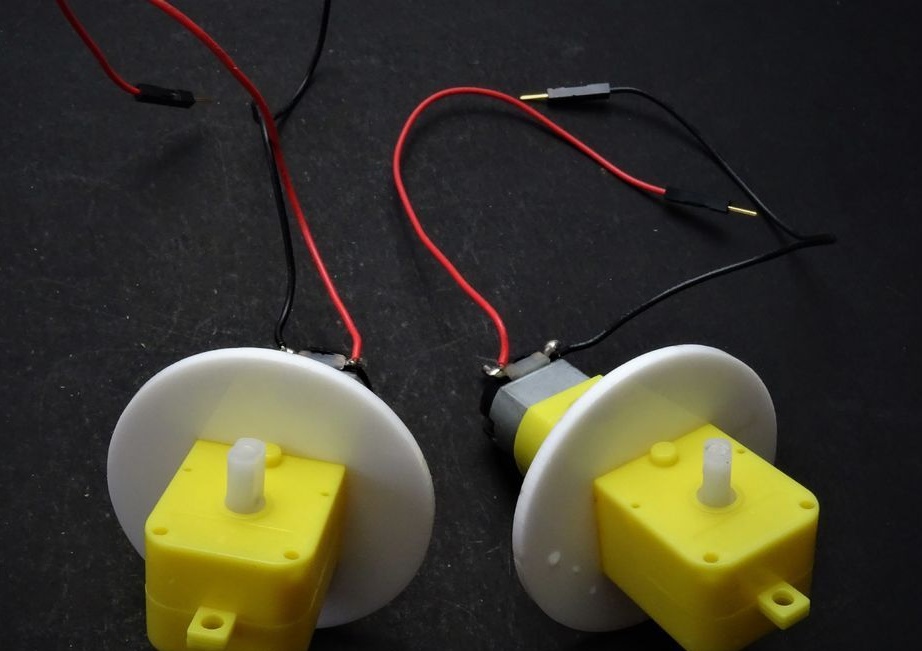

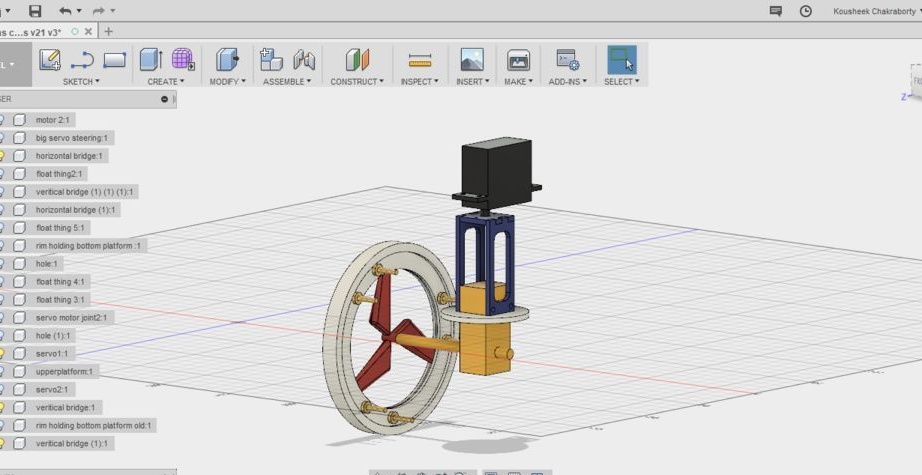
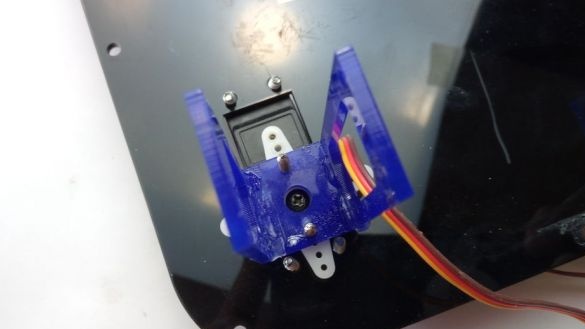
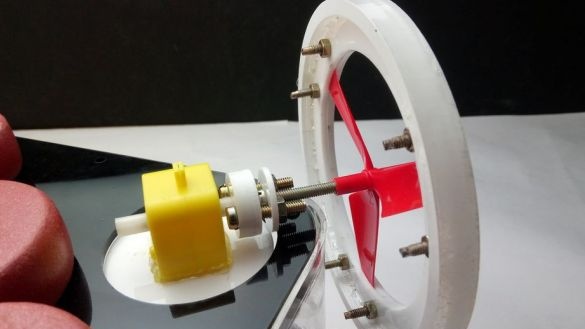
Βήμα εννέα: Μηχανισμός περιστροφής
Συναρμολογεί περιστρεφόμενο περίβλημα. Ένας κινητήρας θα εγκατασταθεί σε αυτό, και θα συνδεθεί με τη μονάδα σερβομηχανισμού.
Κόβει την υπόθεση.

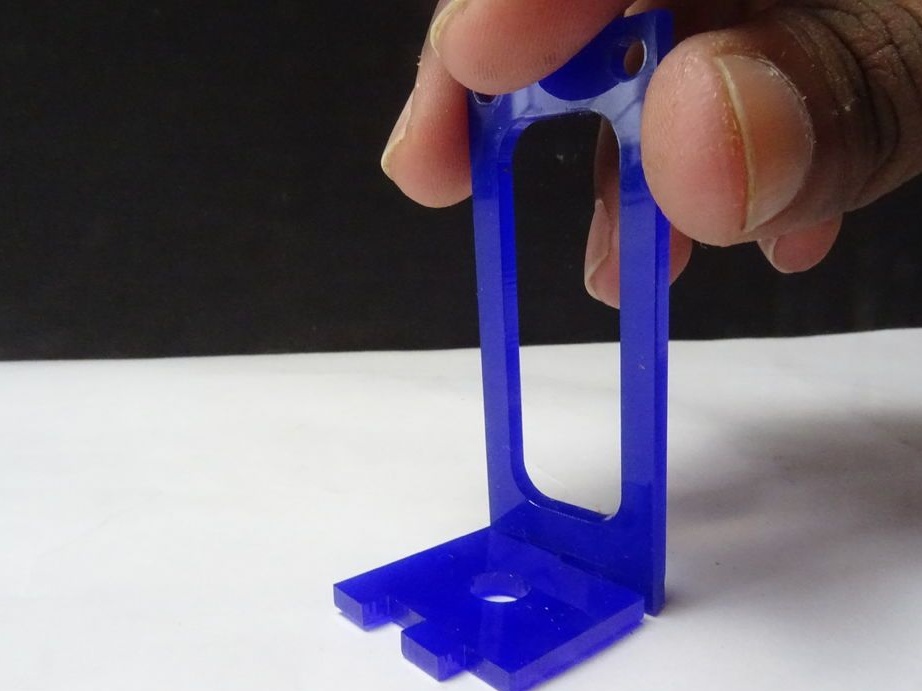

Βίδες στο ζεύκτη.


Βήμα δέκα: Ζωγραφική
Δεδομένου ότι ο πλοίαρχος δεν είχε λευκό ακρυλικό με το απαιτούμενο πάχος, οι τροχοί και το χείλος κόπηκαν από διαφανές ακρυλικό και έπειτα βαμμένο λευκό.




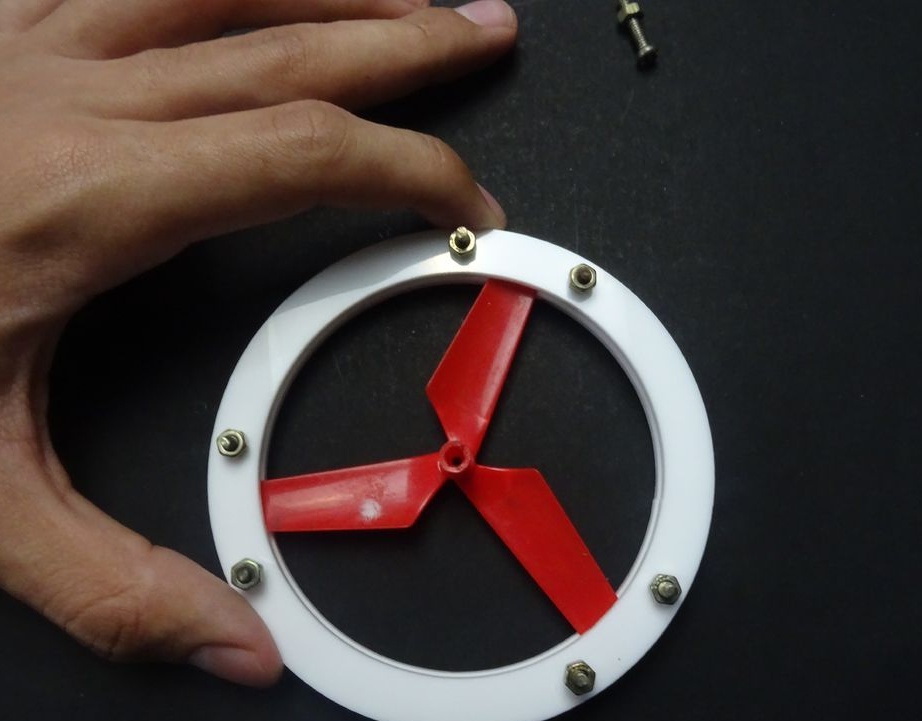
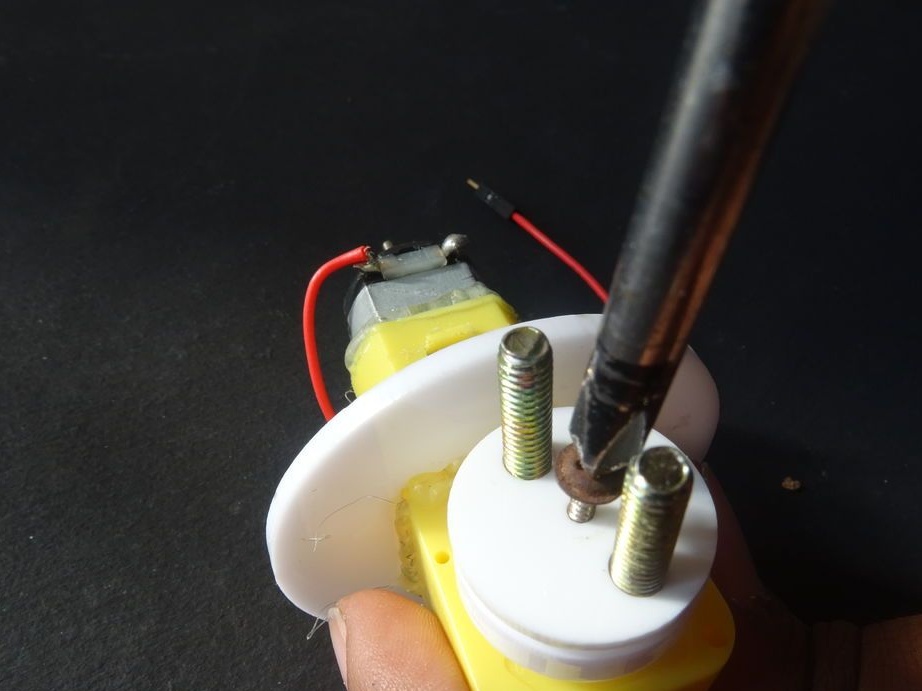
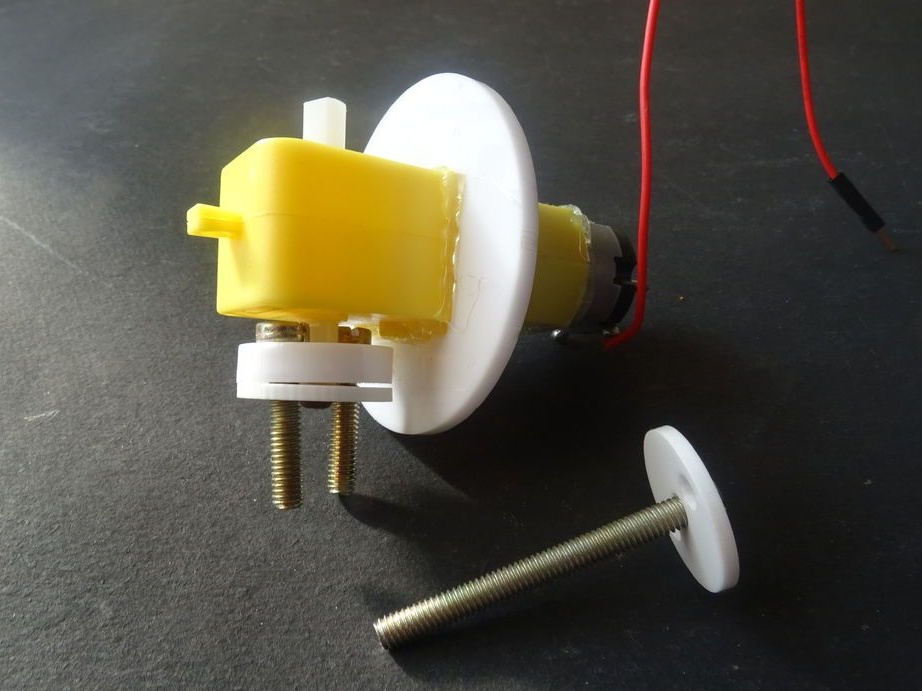
Βήμα ένδεκα: Συναρμολόγηση τροχού
Στις βίδες συλλέγονται δύο ζάντες. Οι βίδες δεν είναι πλήρως σφιγμένες.




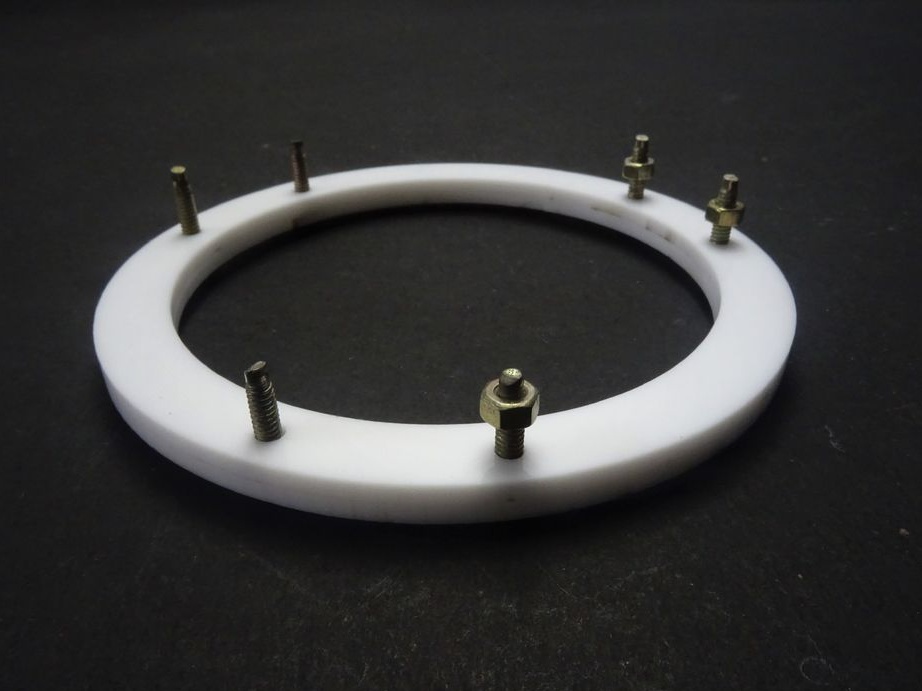
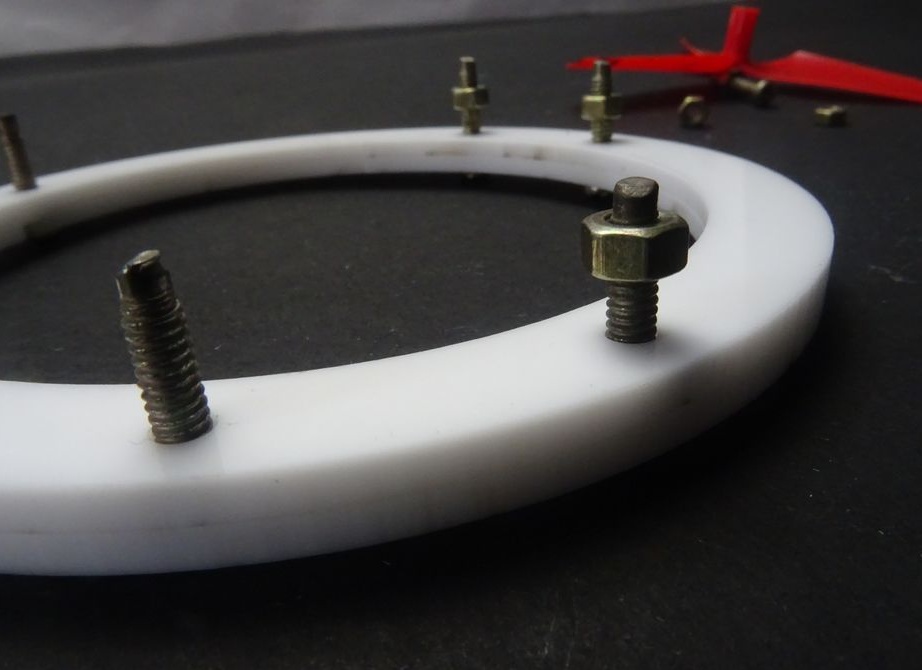
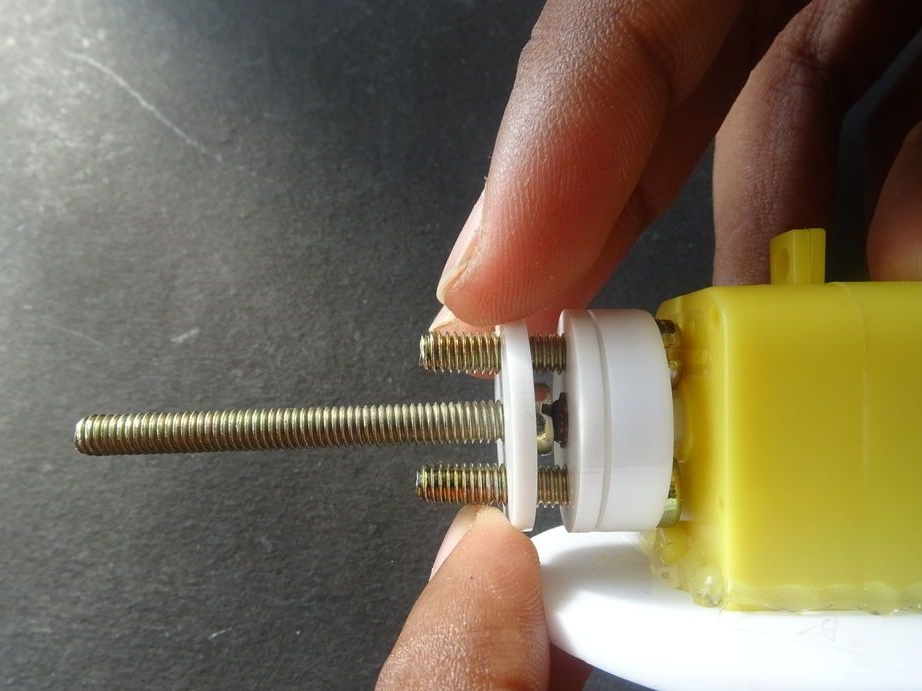
Μεταξύ των δίσκων εγκαθιστά βίδες και σφίγγει τις βίδες. Κατά την εγκατάσταση της βίδας, πρέπει να χρησιμοποιήσετε το πρότυπο για να το κεντράρετε.
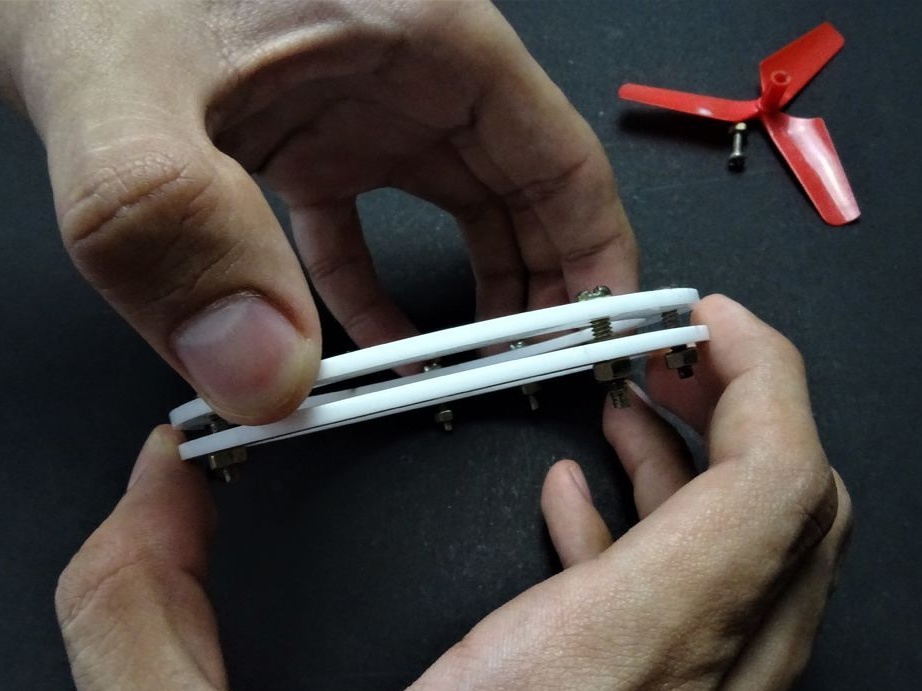
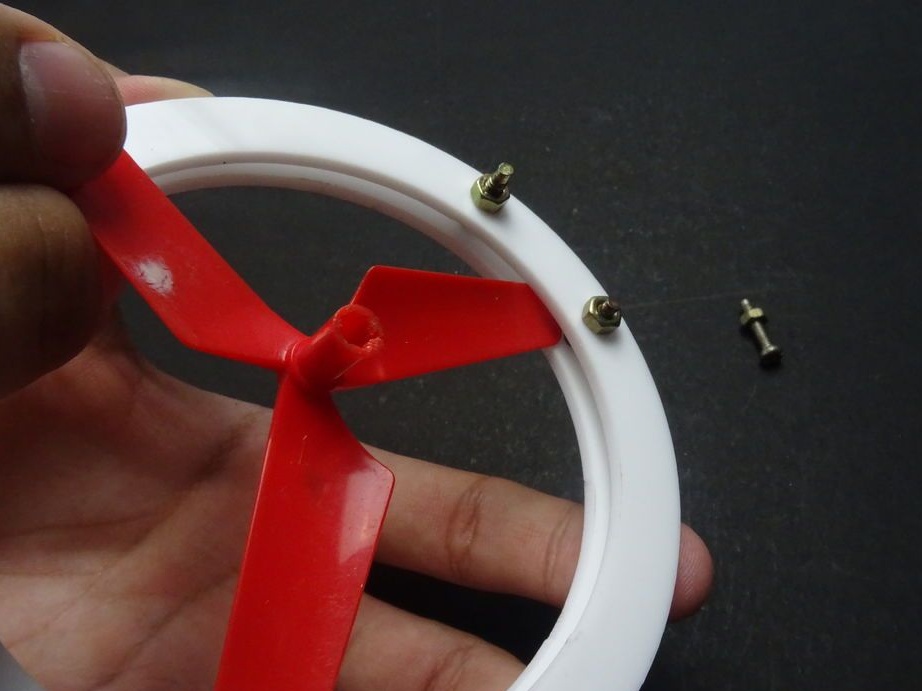
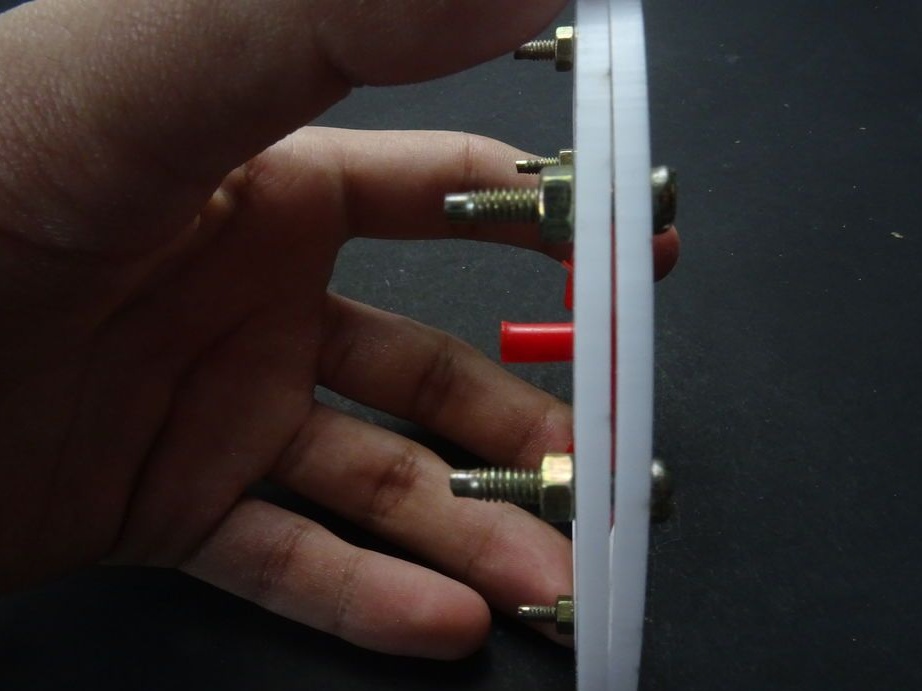

Ορίζει το εξωτερικό χείλος του τροχού. Το χείλος πρέπει να είναι επίπεδο με τον εσωτερικό δίσκο.
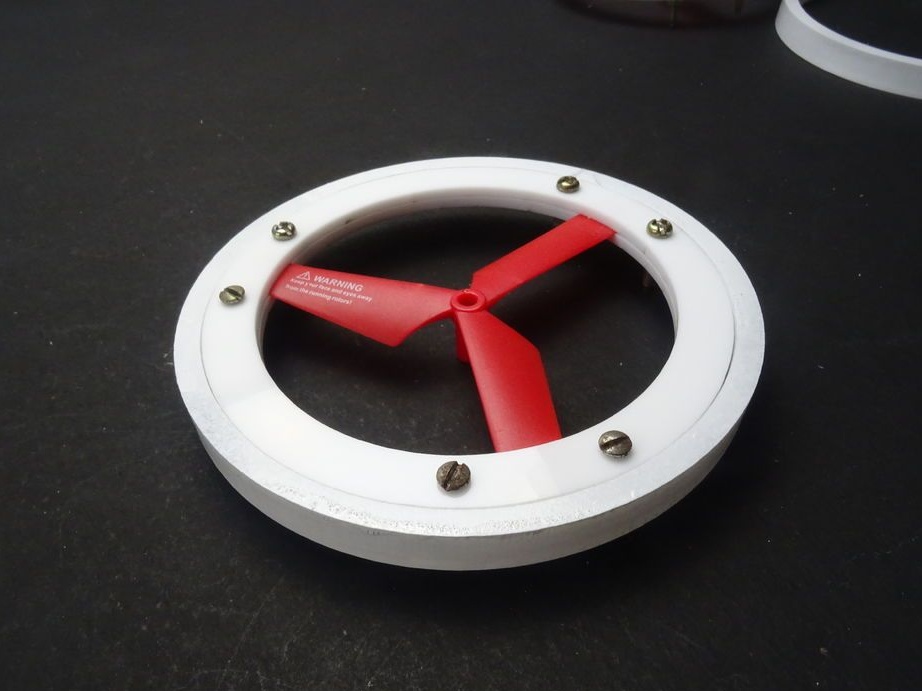

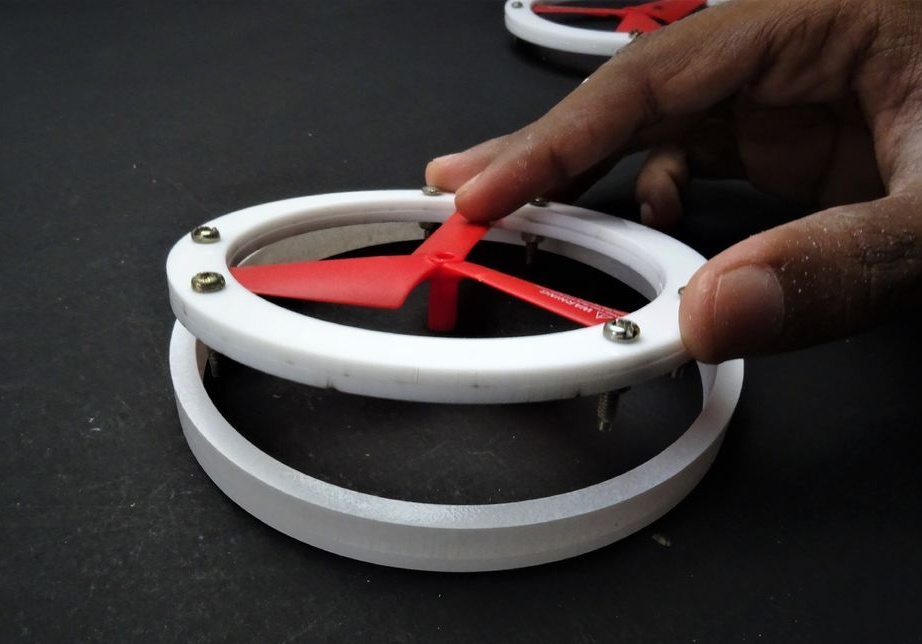
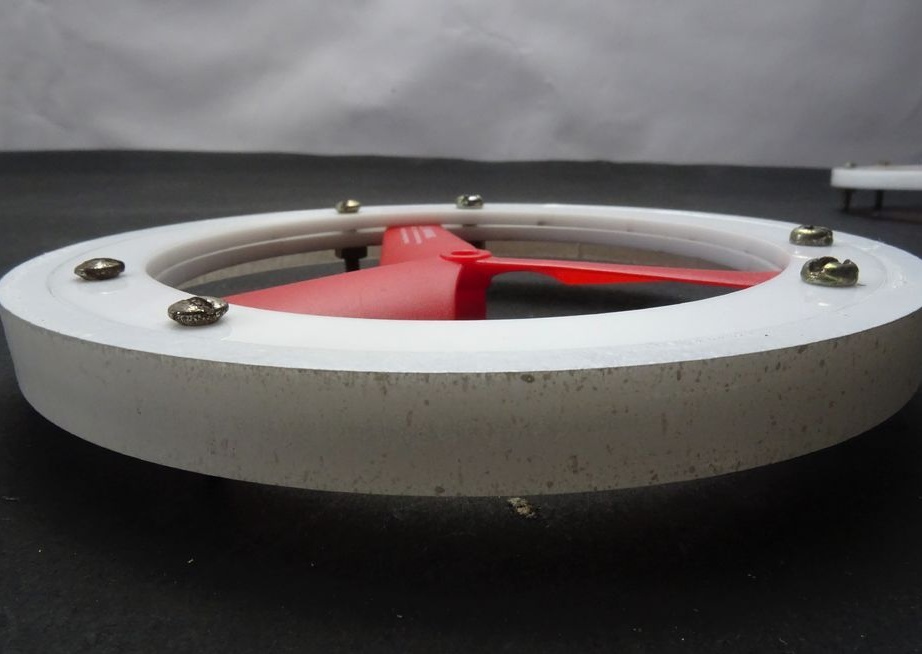

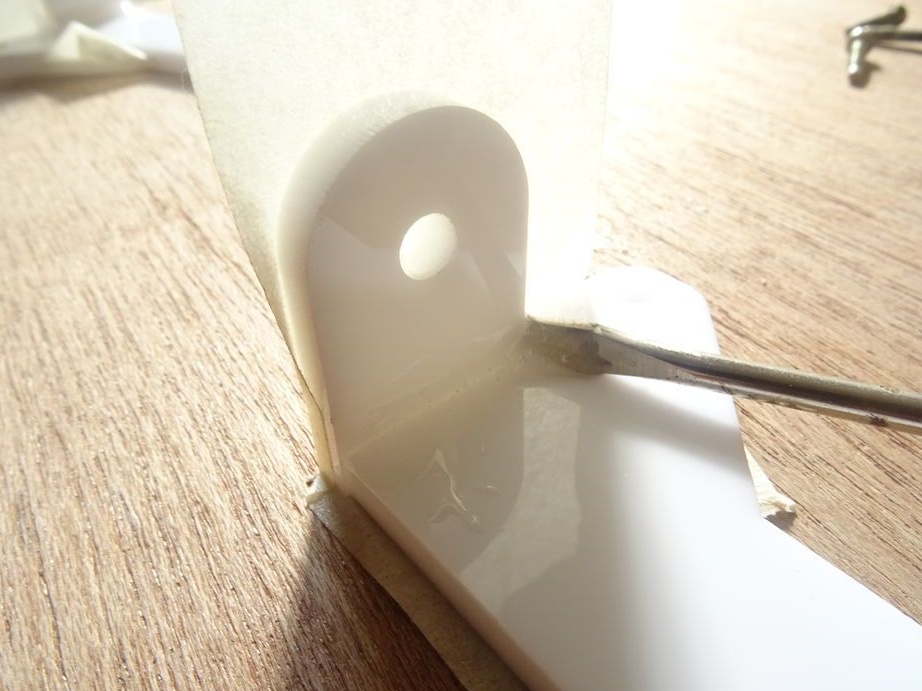
Εφαρμόστε θερμή κόλλα στην άρθρωση.


Τώρα συλλέγει τους μπροστινούς τροχούς.
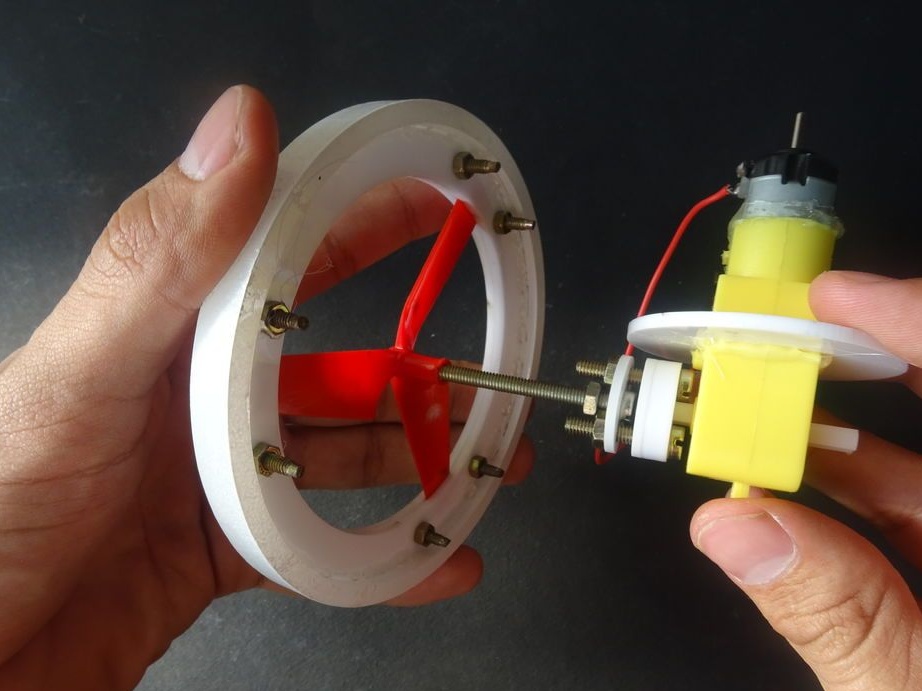
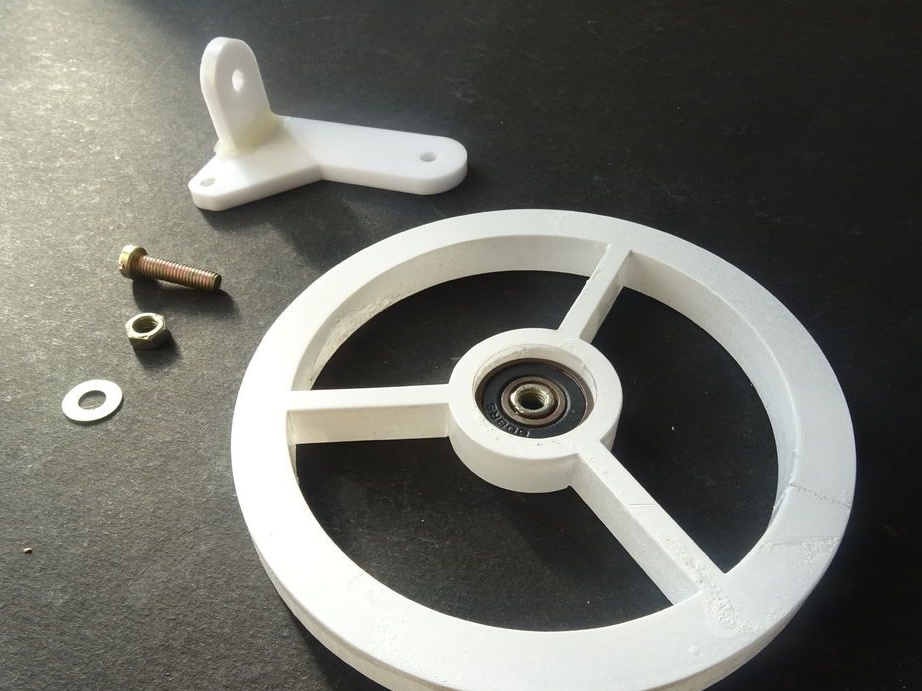
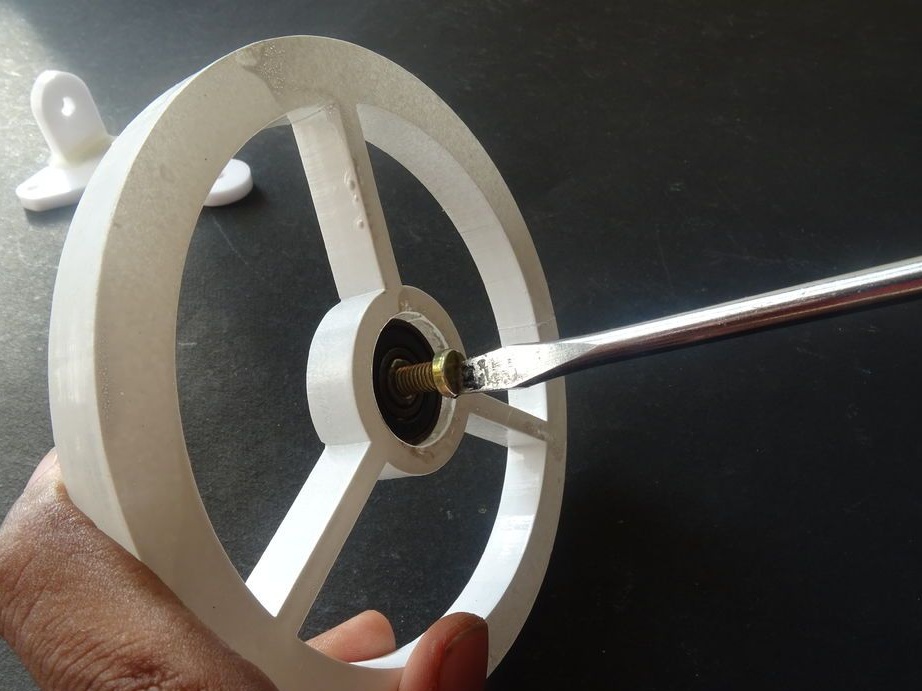
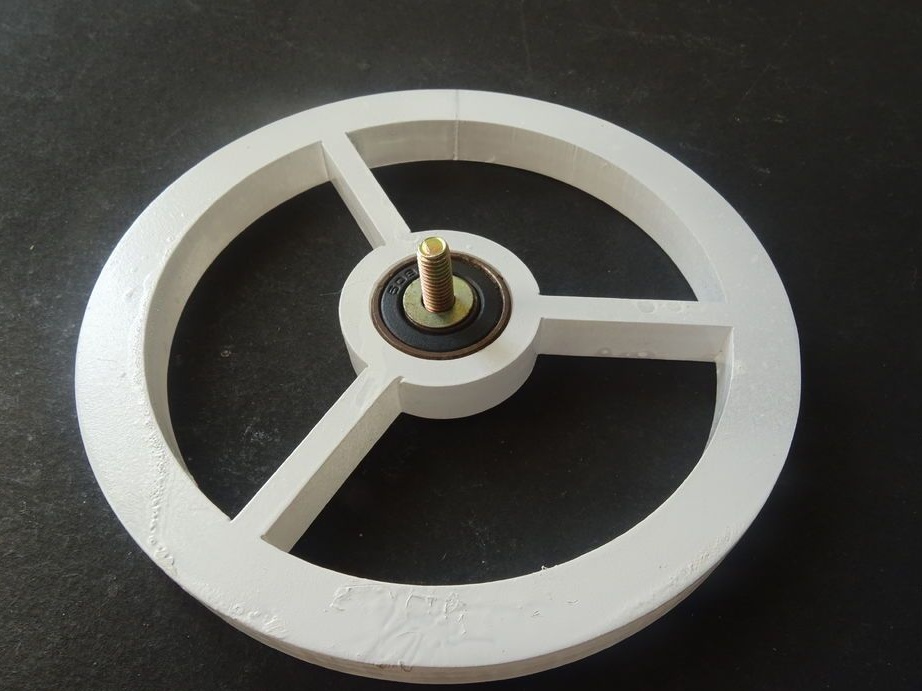
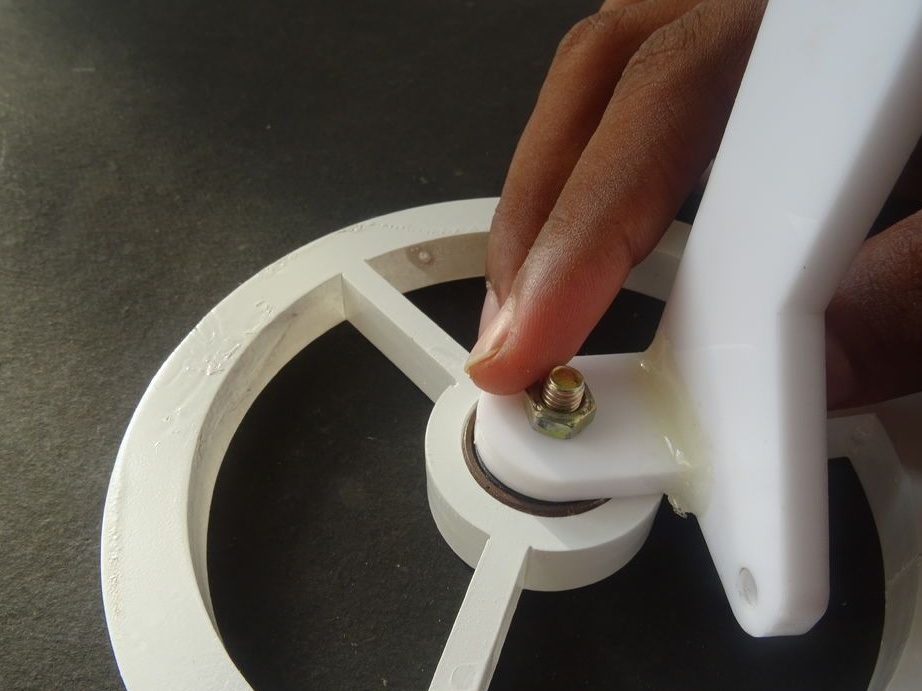
Ένα παξιμάδι κατάλληλου μεγέθους γεμίζει στην εσωτερική κούρσα του ρουλεμάν. Πιέζει τα έδρανα στους μπροστινούς τροχούς.



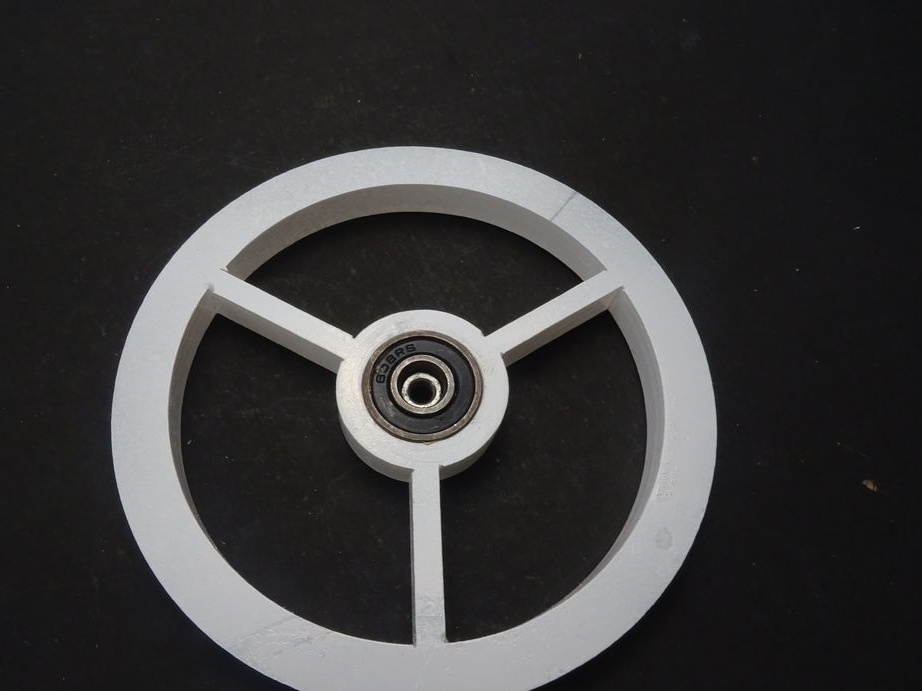
Οι τροχοί είναι έτοιμοι.

Βήμα δώδεκα: Ηλεκτρονικό περίβλημα
Κόβει το περίβλημα για τα ηλεκτρονικά.

Αυτό το πλαίσιο θα περιέχει τα πάντα ηλεκτρονικό εξαρτήματα, πράγμα που σημαίνει ότι πρέπει να είναι στεγανά όσο το δυνατόν πιο στεγανά.


Τέσσερις τετράγωνα κόβονται και κολλούνται από το χαρτόνι στις γωνίες του κιβωτίου. Το καπάκι του κουτιού θα συνδεθεί με αυτά.



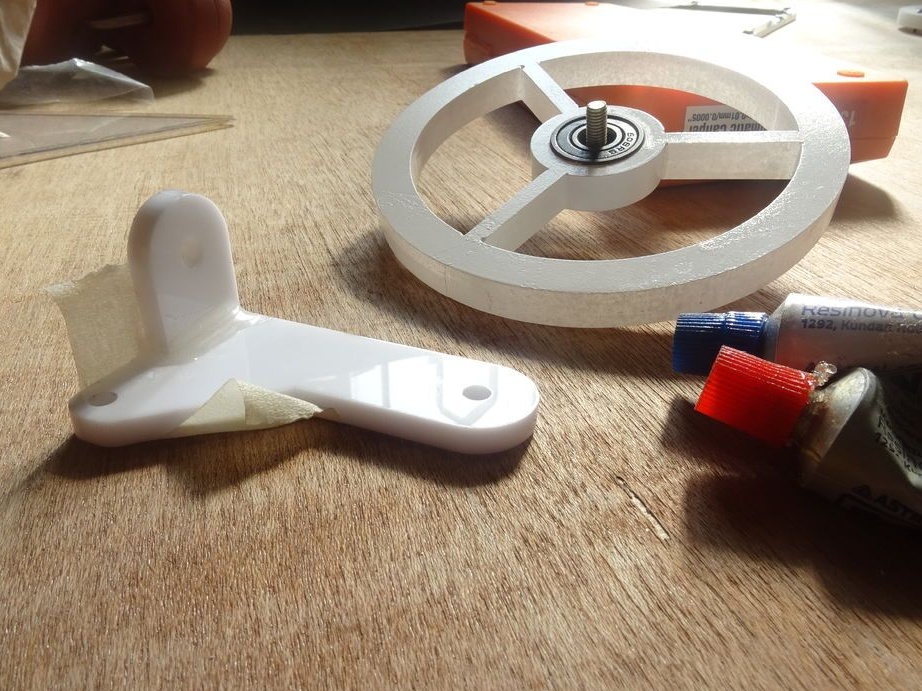
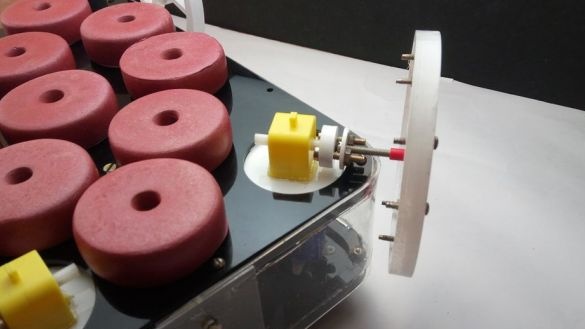
Βήμα δεκατρία: Βάση τροχού
Τώρα πρέπει να συνδέσετε τους τροχούς και το γρανάζι με συμπλέκτη.





Βιδώνει τους εμπρόσθιους τροχούς στην πρόσφυση.


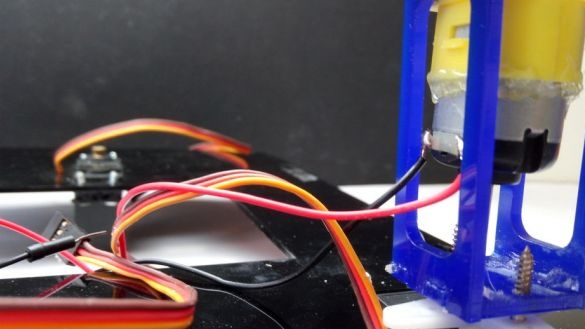
Βήμα δεκατέσσερα: Συνδέστε τη Ηλεκτρονική
Σύμφωνα με το σχέδιο, εγκαθιστά ηλεκτρικά εξαρτήματα.
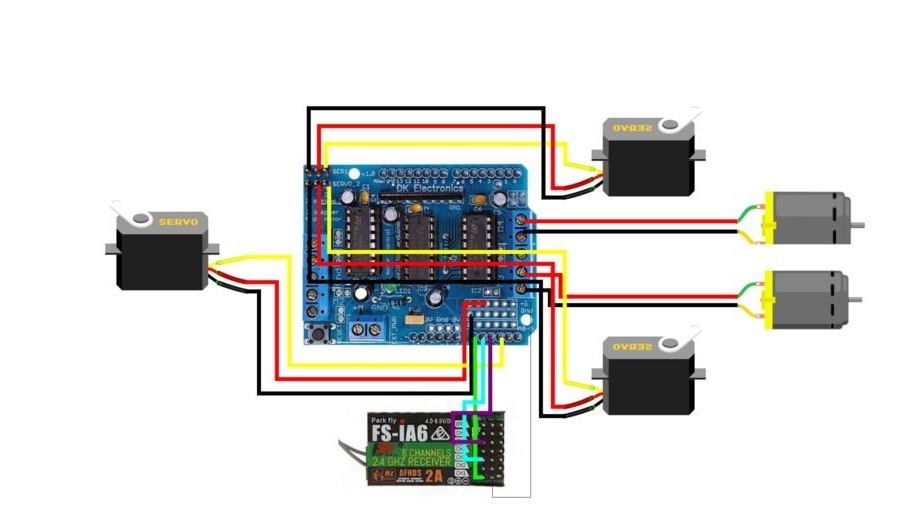

Τα καλώδια του αριστερού κινητήρα στο M1, το δικαίωμα στο M2. Συνδέει ένα πρόγραμμα οδήγησης κινητήρα. Συνδέει σερβομηχανισμούς. Εγκαθιστά τον δέκτη: gnd του δέκτη στο gnd Arduino. + 5 V δέκτη έως +5 V Arduino. ακροδέκτης 3 έως Α0. pin 1 έως A1. pin 5 έως A2. Συνδέει την μπαταρία.
Βήμα δεκαπέντε: Λήψη κώδικα
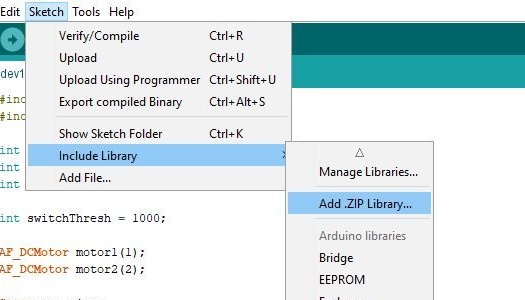
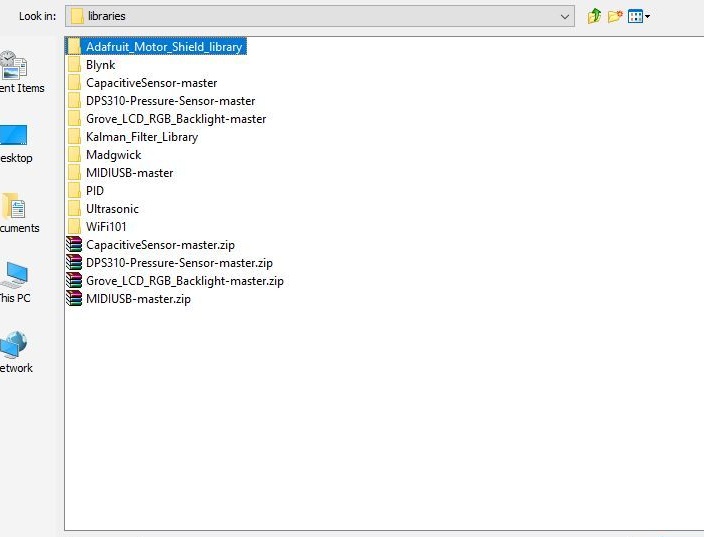
Πρώτα πρέπει να κάνετε λήψη τη βιβλιοθήκη.
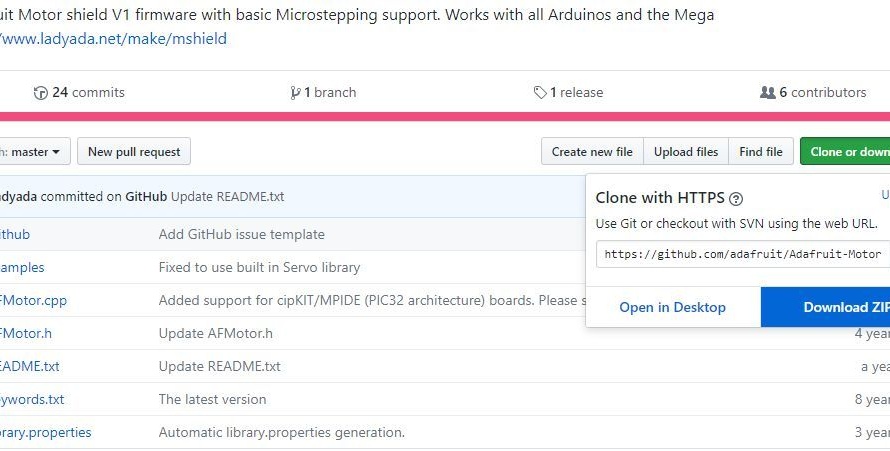
Στη συνέχεια, κατεβάστε τον κώδικα. Κατά τη φόρτωση, η μπαταρία πρέπει να αποσυνδεθεί.
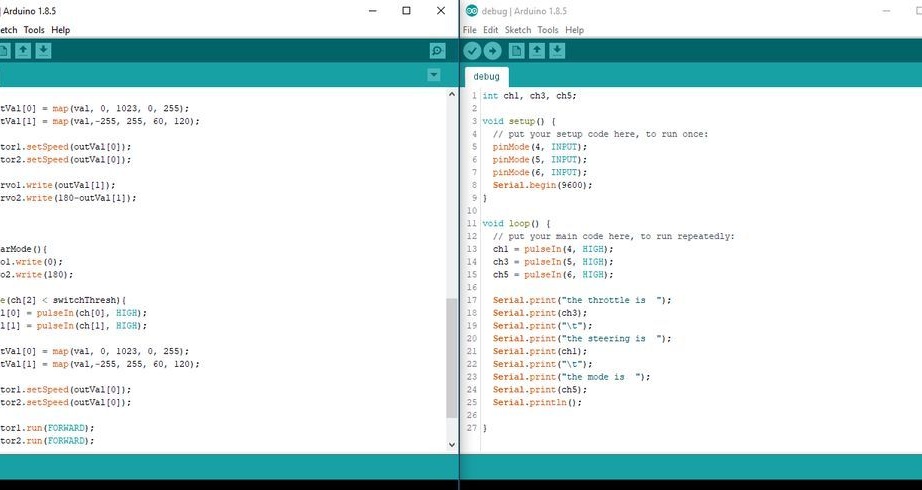
Κατεβάστε τον παρακάτω κώδικα.
amphibious_rover_code.ino
Μετά τη λήψη του κώδικα, ελέγχει τη λειτουργία των κινητήρων και των μηχανισμών κίνησης.
Βήμα δεκαέξι: συναρμολόγηση
Τώρα είναι καιρός να συναρμολογήσετε το όχημα παντός εδάφους.
[κέντρο[/ center]
Εγκαθιστά σερβο. Εγκαθιστά κινητήρες με γρανάζια.

Στερεώνει τους τροχούς. Περιστρέφει και τα δύο μισά του σώματος.






Όλα είναι έτοιμα και τώρα μπορείτε να δοκιμάσετε.