
Αντιστροφέας 12 -220 volts σε αρμονικό άξονα Arduino με πλήρη κωδικό προγράμματος.
Θεωρία
Η επίτευξη της παραγωγής ημιτονοειδούς κύματος είναι αρκετά δύσκολη και δεν μπορεί να χρησιμοποιηθεί για μετατροπείς, επειδή ηλεκτρονικό οι συσκευές συνήθως δεν τους αρέσουν τα εκθετικά αυξανόμενα ρεύματα ή τάσεις. Δεδομένου ότι οι μετατροπείς κατασκευάζονται κυρίως με ηλεκτρονικές συσκευές στερεάς κατάστασης, συνήθως εξαλείφεται η ημιτονοειδής κυματομορφή.
Οι ηλεκτρονικές συσκευές ισχύος κατά την εργασία με ημιτονοειδή κύματα δίνουν αναποτελεσματικά αποτελέσματα, καθώς οι συσκευές κατά κανόνα θερμαίνονται σε σύγκριση με τους ορθογώνιους παλμούς.
Έτσι, η καλύτερη επιλογή για την υλοποίηση ενός ημιτονοειδούς κύματος σε έναν αντιστροφέα είναι το PWM, που σημαίνει διαμόρφωση πλάτους παλμού ή PWM.
Το PWM είναι ένας βελτιωμένος τρόπος (ψηφιακή εκδοχή) εκθέσεως εκθετικής κυματομορφής μέσω αναλογικά μεταβαλλόμενου πλάτους τετραγωνικού παλμού, η καθαρή τιμή του οποίου υπολογίζεται ακριβώς σύμφωνα με την καθαρή τιμή της επιλεγμένης εκθετικής κυματομορφής, εδώ η "καθαρή" τιμή αναφέρεται στην τιμή RMS. Επομένως, το υπολογισμένο PWM με αναφορά σε ένα δεδομένο ημιτονοειδές κύμα μπορεί να χρησιμοποιηθεί ως ένα ιδανικό ισοδύναμο για την αντιγραφή ενός δεδομένου ημιτονοειδούς κύματος. Επιπλέον, τα PWMs θα είναι ιδανικά συμβατά με τις ηλεκτρονικές συσκευές ισχύος (MOSFETs, BJTs, IGBTS) και θα επιτρέπουν τη χρήση τους με ελάχιστη θερμότητα.
Τι είναι το SPWM;
Η πιο συνηθισμένη μέθοδος είναι η παραγωγή ενός PWM sinewaver (ημιτονοειδούς κύματος) ή του SPWM, με την εφαρμογή διαφόρων εκθετικά μεταβλητών σημάτων στην είσοδο ενός λειτουργικού ενισχυτή για την απαραίτητη επεξεργασία. Μεταξύ των δύο σημάτων εισόδου, θα πρέπει να υπάρχει πολύ μεγαλύτερη συχνότητα σε σύγκριση με την άλλη.
Χρησιμοποιώντας δύο σήματα εισόδου
Όπως αναφέρθηκε στην προηγούμενη ενότητα, η διαδικασία περιλαμβάνει την παροχή δύο εκθετικά μεταβαλλόμενων σημάτων στις εισόδους του λειτουργικού ενισχυτή.
Εδώ, ο λειτουργικός ενισχυτής διαμορφώνεται ως τυπικός συγκριτής, οπότε μπορούμε να υποθέσουμε ότι ο λειτουργικός ενισχυτής θα αρχίσει αμέσως να συγκρίνει τα στιγμιαία επίπεδα τάσης αυτών των δύο υπερκείμενων σημάτων τη στιγμή που εμφανίζονται ή εφαρμόζονται στις εισόδους του.
Προκειμένου ο λειτουργικός ενισχυτής να εφαρμόσει σωστά το απαραίτητο ημιτονοειδές PWM στην έξοδο του, είναι απαραίτητο ένα από τα σήματα να έχει πολύ μεγαλύτερη συχνότητα από το άλλο. Η πιο αργή συχνότητα εδώ είναι εκείνη που θα πρέπει να είναι το ημιτονοειδές κύμα του δείγματος, το οποίο θα πρέπει να προσομοιωθεί (αντιγραφεί) από τα PWMs.
Στην ιδανική περίπτωση, τα δύο σήματα πρέπει να είναι ημιτονοειδή (ένα με υψηλότερη συχνότητα από το άλλο), ωστόσο το ίδιο μπορεί να πραγματοποιηθεί με τη συμπερίληψη ενός τριγωνικού κύματος (υψηλή συχνότητα) και ενός ημιτονοειδούς κύματος (επιλεκτικό κύμα με χαμηλή συχνότητα). Όπως φαίνεται στις επόμενες εικόνες, το σήμα υψηλής συχνότητας τροφοδοτείται σταθερά στην είσοδο αναστροφής (-) του λειτουργικού ενισχυτή, ενώ ένα άλλο βραδύτερο ημιτονοειδές σήμα τροφοδοτείται στην είσοδο μη-αναστροφής (+) του ενισχυτή λειτουργίας. Στη χειρότερη περίπτωση, και τα δύο σήματα μπορεί να είναι τριγωνικά κύματα με συνιστώμενα επίπεδα συχνότητας, όπως περιγράφεται παραπάνω. Ωστόσο, αυτό θα βοηθήσει στην επίτευξη ενός λογικά καλού ισοδύναμου sinewave PWM.
Ένα σήμα με μεγαλύτερη συχνότητα ονομάζεται φέρον σήμα, ενώ ένα βραδύτερο σήμα δείγματος ονομάζεται είσοδος διαμόρφωσης.
Δημιουργήστε SPWM με τριγωνικό κύμα και κύμα τένοντα
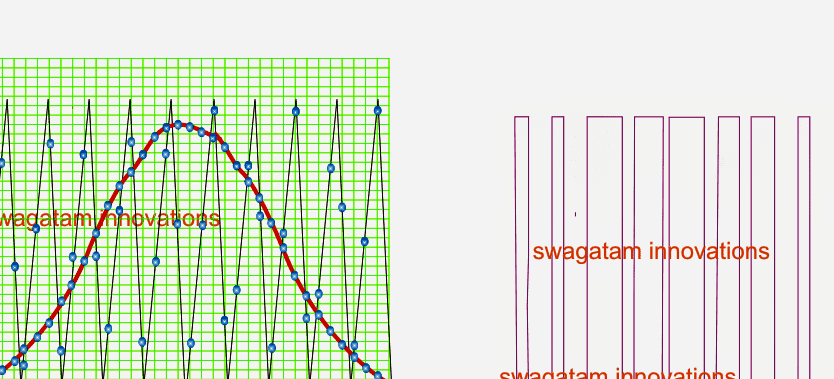
Όσον αφορά το παραπάνω σχήμα, είναι δυνατόν να απεικονιστούν με σαφήνεια μέσα από τα γραφικά σημεία τα διάφορα σημεία συμπίεσης ή επικάλυψης τάσης των δύο σημάτων για δεδομένη χρονική περίοδο. Ο οριζόντιος άξονας δείχνει την χρονική περίοδο της κυματομορφής, ενώ ο κατακόρυφος άξονας δείχνει τα επίπεδα τάσης των 2 ταυτοχρόνως σε λειτουργία, την υπέρθεση της κυματομορφής. Ο αριθμός μας πληροφορεί τον τρόπο με τον οποίο ο λειτουργικός ενισχυτής θα ανταποκριθεί στα δείγματα που αντιστοιχούν στα στιγμιαία επίπεδα τάσης των δύο σημάτων και παράγει αντίστοιχα μεταβαλλόμενο ημιτονοειδές PWM στην έξοδο του. Ένας λειτουργικός ενισχυτής (op-amp) απλά συγκρίνει τα επίπεδα τάσης ενός κύματος γρήγορου τριγώνου που αλλάζει αμέσως ένα ημιτονοειδές κύμα (και μπορεί επίσης να είναι ένα κύμα τριγώνου) και ελέγχει περιπτώσεις στις οποίες η τάση της κυματομορφής τριγώνου μπορεί να είναι χαμηλότερη από την τάση του ημιτονοειδούς κύματος και αποκρίνεται δημιουργήστε αμέσως υψηλή λογική στις εξόδους σας.
Αυτό διατηρείται όσο το δυναμικό κύμα του τριγώνου εξακολουθεί να είναι χαμηλότερο από το δυναμικό του ημιτονοειδούς κύματος και η στιγμή που ανιχνεύεται ότι το δυναμικό του ημιτονοειδούς κύματος είναι χαμηλότερο από το στιγμιαίο δυναμικό του κύματος του τριγώνου, οι έξοδοι επιστρέφουν με ελάχιστο όριο και αντέχουν μέχρι να επαναληφθεί η κατάσταση.
Αυτή η συνεχής σύγκριση των στιγμιαίων επιπέδων δυνητικών δύο κυματομορφών σε δύο εισόδους των λειτουργικών ενισχυτών οδηγεί στη δημιουργία αντίστοιχα μεταβαλλόμενων PWM, οι οποίες μπορούν να επαναλάβουν με ακρίβεια το ημιτονοειδές σχήμα που εφαρμόζεται στην είσοδο που δεν αντιστρέφει τον λειτουργικό ενισχυτή.
Λειτουργικός ενισχυτής και SPWM
Εμφανίζεται το παρακάτω σχήμα μοντελοποίηση την παραπάνω λειτουργία:
Εδώ μπορούμε να παρατηρήσουμε πώς εφαρμόζεται στην πράξη, και έτσι ο λειτουργικός ενισχυτής θα κάνει το ίδιο (αν και με πολύ μεγαλύτερη ταχύτητα, στα MS).
Η λειτουργία είναι προφανής και δείχνει με σαφήνεια πώς ο λειτουργικός ενισχυτής πρέπει να επεξεργαστεί το ημιτονοειδές κύμα PWM συγκρίνοντας δύο ταυτόχρονα μεταβαλλόμενα σήματα στις εισόδους του, όπως περιγράφεται στις προηγούμενες ενότητες.
Στην πραγματικότητα, ο λειτουργικός ενισχυτής θα επεξεργαστεί το ημιτονοειδές PWM με μεγαλύτερη ακρίβεια από την προσομοίωση που φαίνεται παραπάνω, μπορεί να είναι 100 φορές καλύτερη, δημιουργώντας εξαιρετικά ομοιόμορφο και καλά μετρημένο PWM που ταιριάζει με το παρεχόμενο δείγμα. Ημιτονοειδές κύμα.
Arduino inverter δύο κυκλώματα
λίστα εξαρτημάτων
Όλες οι αντιστάσεις 1/4 Watt, 5% CFR
• 10K = 4
• 1K = 2
• BC547 = 4 τεμάχια
• MOSFETs IRF540 = 2pcs
• Arduino UNO = 1
• Μετασχηματιστής = 9-0-9V / 220V / 120V.
• Μπαταρία = 12V
Όλες οι αντιστάσεις 1/4 Watt, 5% CFR
• 10K = 4
• 1K = 2
• BC547 = 4 τεμάχια
• MOSFETs IRF540 = 2pcs
• Arduino UNO = 1
• Μετασχηματιστής = 9-0-9V / 220V / 120V.
• Μπαταρία = 12V
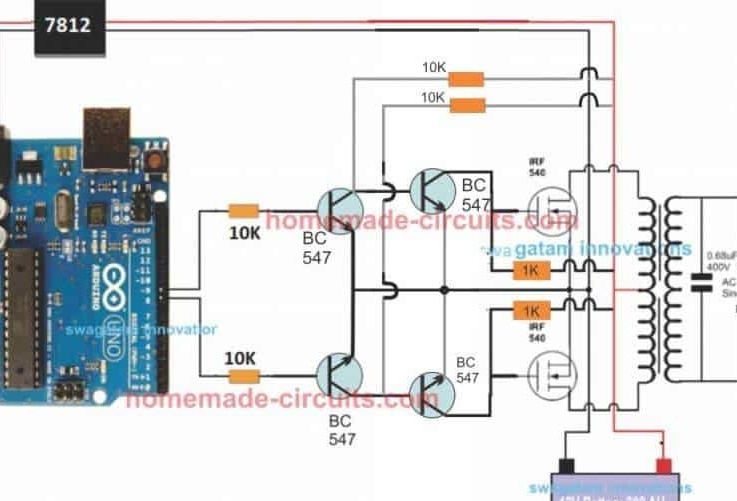
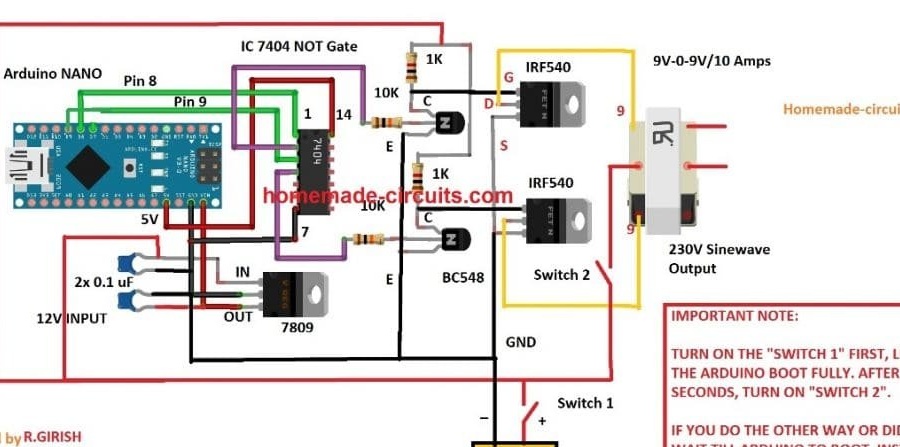
Ο σχεδιασμός είναι στην πραγματικότητα πολύ απλός, όπως φαίνεται στο παρακάτω σχήμα.
Η ακίδα # 8 και η ακίδα # 9 δημιουργούν εναλλακτικά το PWM και αλλάζουν τα MOSFET με το ίδιο PWM.
Ο Mosfet, με τη σειρά του, επάγει μια υπερβολικά τρέχουσα κυματομορφή SPWM στον μετασχηματιστή, χρησιμοποιώντας την ισχύ της μπαταρίας, προκαλώντας το δεύτερο μετασχηματιστή να παράγει μια πανομοιότυπη κυματομορφή.
Το προτεινόμενο κύκλωμα αντιστροφέα Arduino μπορεί να αναβαθμιστεί σε οποιοδήποτε προτιμώμενο υψηλότερο επίπεδο ισχύος αντικαθιστώντας απλώς το Mosfets και τον μετασχηματιστή, αντίστοιχα, εναλλακτικά, μπορείτε επίσης να το μετατρέψετε σε πλήρη γέφυρα ή μετατροπέα ημιτονοειδούς κύματος Η-γέφυρας
Arduino δύναμη συμβουλίου
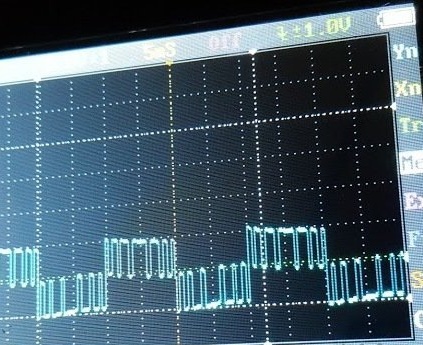
Εικόνες κυματομορφής για το Arduino SPWM
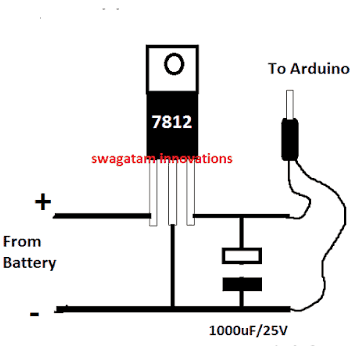
Δεδομένου ότι το Arduino θα παράγει μια έξοδο 5V, αυτό μπορεί να μην είναι ιδανικό για τον απευθείας έλεγχο των τρανζίστορ MOS.
Επομένως, είναι απαραίτητο να αυξήσετε το επίπεδο στροβοσκοπίου στα 12V έτσι ώστε τα Mosfets να λειτουργούν σωστά χωρίς να θερμαίνουν τις συσκευές.
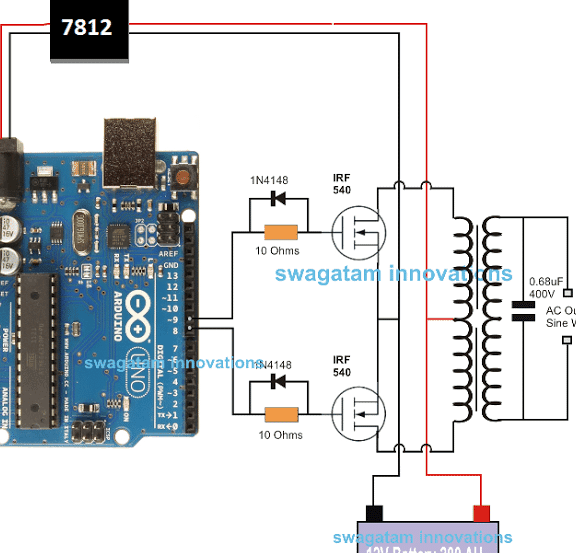
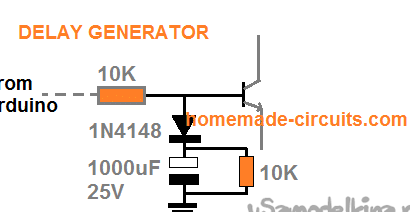
Για να βεβαιωθείτε ότι το Mosfety δεν ξεκινά όταν ξεκινάει ή ξεκινά το Arduino, πρέπει να προσθέσετε την ακόλουθη γεννήτρια καθυστέρησης και να την συνδέσετε με τη βάση των τρανζίστορ BC547. Αυτό θα προστατεύσει τα Mosfets και θα τους αποτρέψει από την καύση κατά τη διάρκεια ενός διακόπτη τροφοδοσίας και όταν εκκινήσει το Arduino.
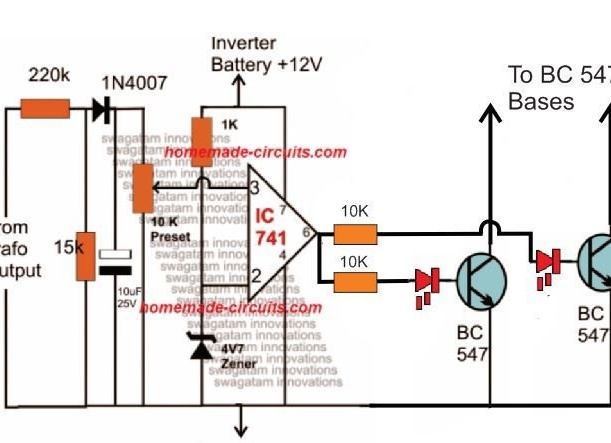
Προσθήκη ρυθμιστή αυτόματης τάσης
Όπως και σε κάθε άλλο μετατροπέα, στην έξοδο αυτού του σχεδιασμού, το ρεύμα μπορεί να αυξηθεί σε μη ασφαλή όρια όταν η μπαταρία είναι πλήρως φορτισμένη.
Για τον έλεγχο αυτό, προσθέστε έναν αυτόματο ρυθμιστή τάσης.
Οι συλλέκτες BC547 πρέπει να συνδέονται με τις βάσεις του αριστερού ζεύγους BC547, οι οποίες συνδέονται με το Arduino μέσω αντιστάσεων 10K.
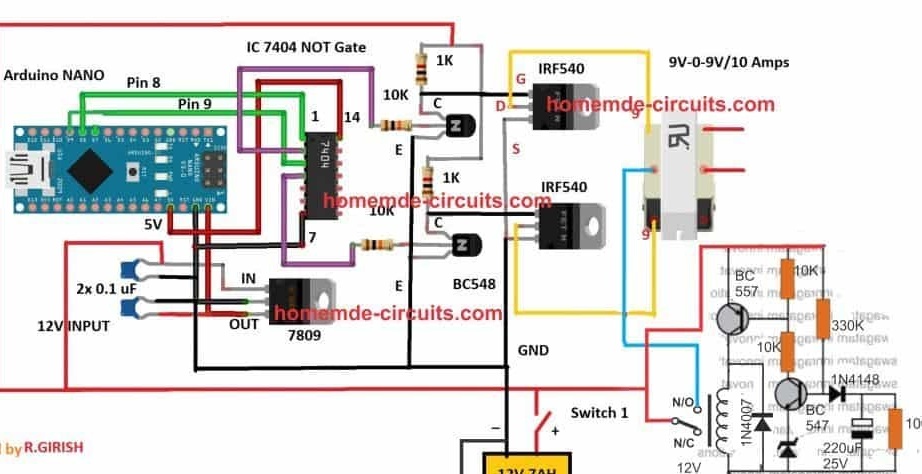
Η δεύτερη έκδοση του μετατροπέα χρησιμοποιώντας το τσιπ sn7404 / k155ln1
Σημαντικό:
Για να αποφευχθεί τυχαία ενεργοποίηση πριν από τη φόρτωση του Arduino, μια απλή καθυστέρηση στο κύκλωμα χρονοδιακόπτη μπορεί να συμπεριληφθεί στον παραπάνω σχεδιασμό, όπως φαίνεται παρακάτω:
Κωδικός προγράμματος:
/ *
Αυτός ο κώδικας βασίστηκε στον κώδικα Swagatam SPWM με αλλαγές που έγιναν για την άρση των σφαλμάτων. Χρησιμοποιήστε αυτόν τον κώδικα, όπως θα χρησιμοποιούσατε οποιαδήποτε άλλα έργα του Swagatam.
Ο κίνδυνος Atton 2017
* /
const int sPWMArray [] = {500,500,750,500,1250,500,2000,500,1250,500,750,500,500}. // Αυτός είναι ο πίνακας με τις τιμές SPWM αλλάζουν κατά βούληση
const int sPWMArrayValues = 13; // Χρειάζεται αυτό, αφού το C δεν σας δίνει το μήκος ενός πίνακα
// Οι ακίδες
const int sPWMpin1 = 10;
const int sPWMpin2 = 9;
// Η πινέζα μεταβαίνει
bool sPWMpin1Status = true;
bool sPWMpin2Status = true;
void setup ()
{
pinMode (sPWMpin1, OUTPUT);
pinMode (sPWMpin2, OUTPUT);
}}
κενός βρόχος ()
{
// Βρόχος για τον πείρο 1
για το (int i (0), i! = sPWMArrayValues, i ++)
{
αν (sPWMpin1Status)
{
Ψηφιακή εγγραφή (sPWMpin1, HIGH);
καθυστέρησηMicroseconds (sPWMArray [i]);
sPWMpin1Status = false;
}}
αλλού
{
ψηφιακή καταγραφή (sPWMpin1, LOW);
καθυστέρησηMicroseconds (sPWMArray [i]);
sPWMpin1Status = true;
}}
}}
// Βρόχος για τον ακροδέκτη 2
για το (int i (0), i! = sPWMArrayValues, i ++)
{
αν (sPWMpin2Status)
{
Ψηφιακή εγγραφή (sPWMpin2, HIGH);
καθυστέρησηMicroseconds (sPWMArray [i]);
sPWMpin2Status = false;
}}
αλλού
{
ψηφιακήWrite (sPWMpin2, LOW);
καθυστέρησηMicroseconds (sPWMArray [i]);
sPWMpin2Status = true;
}}
}}
}}Καλή τύχη.