



Ένας κοπτήρας αφρού είναι ένα εξαιρετικό εργαλείο για την κατασκευή εξαρτημάτων για αεροσκάφη. Αυτό το μηχάνημα σας επιτρέπει να κόψετε με ακρίβεια οποιοδήποτε σχήμα του αεροδυναμικού προφίλ σύμφωνα με το CAD.
Το μηχάνημα έχει ένα σύρμα χρωμίου μεταξύ δύο οδηγών. Το ρεύμα διέρχεται από το καλώδιο, το καλώδιο θερμαίνεται και οι οδηγοί κινούνται, κόβοντας περίπλοκα περιγράμματα, όπως κωνικά φτερά. Κάθε άξονας κινούνται από ένα βηματικό κινητήρα μέσω του άξονα, της ζώνης GT2 και της τροχαλίας. Η δύναμη κοπής πρέπει να είναι ελάχιστη και η κατασκευή πρέπει να είναι αρκετά σκληρή ώστε να αντέχει την τάση του σύρματος που τεντώνεται μεταξύ των στηριγμάτων.
Πρόκειται για μια πραγματική μηχανή τεσσάρων αξόνων που μπορεί να κόψει διαφορετικά σχήματα και στις δύο πλευρές την ίδια στιγμή, έτσι προκύπτει το πρόβλημα του τρόπου ελέγχου των τεσσάρων ανεξάρτητων αξόνων ταυτόχρονα. Πολλά μαθήματα επικεντρώνονται σε μηχανές 3 αξόνων, όπως οι τρισδιάστατοι εκτυπωτές, αλλά φαίνεται ότι δεν υπάρχει επαρκής τεκμηρίωση για τη δημιουργία μιας μηχανής 4 αξόνων χρησιμοποιώντας άμεσα διαθέσιμα εξαρτήματα και λογισμικό ανοιχτού κώδικα. Ο πλοίαρχος βρήκε διάφορους ανθρώπους που χρησιμοποίησαν παρόμοια έργα Arduino και Grbl, και αποφάσισε να κάνει τη δική του μηχανή.
Εργαλεία και υλικά:
- Κόντρα πλακέ (12mm).
-Μεταλλικές ράβδοι.
- Βίδα (M8 x 600 mm).
-Σύνδεση κινητήρα M8-M5 (M8 για τον κοχλία κίνησης και M5 για τον άξονα του κινητήρα).
-Arduino Mega 2560;
-RAMPS 1.4.
-Κινητήρες κινητήρα (ένας για κάθε άξονα).
-A4988 Stepper driver (ένας για κάθε βηματικό κινητήρα).
- Τροφοδοσία 12V για το Arduino + Ράμπες.
- Μεταβλητή παροχή ρεύματος (φορτιστές Lipo με λειτουργία Hot-wire).
-Σύγχρονος σύρμα.
Βήμα πρώτο: Λογισμικό
Το σκληρό μέρος της δημιουργίας ενός CNC 4 αξόνων βρίσκει λογισμικό για τη δημιουργία του κώδικα G και τον έλεγχο του μηχανήματος. Μια αναζήτηση λογισμικού οδήγησε τον δημιουργό του https://www.marginallyclever.com/2013/09/how-to-build-a-4-axis-cnc-gcode-interpreter-for-arduino/, που αναπτύχθηκε από την Marginally clever, η οποία χρησιμοποιεί Arduino Mega 2560 και CNC Ράμπες 1.4.
Ορισμένες πληροφορίες χρησιμοποιήθηκαν από τους ακόλουθους συντάκτες: Rckeith και rcgroups.com
Grbl Hotwire Controller.zip
GRBL8c2mega2560RAMPS.zip
FoamXL 7.0.zip
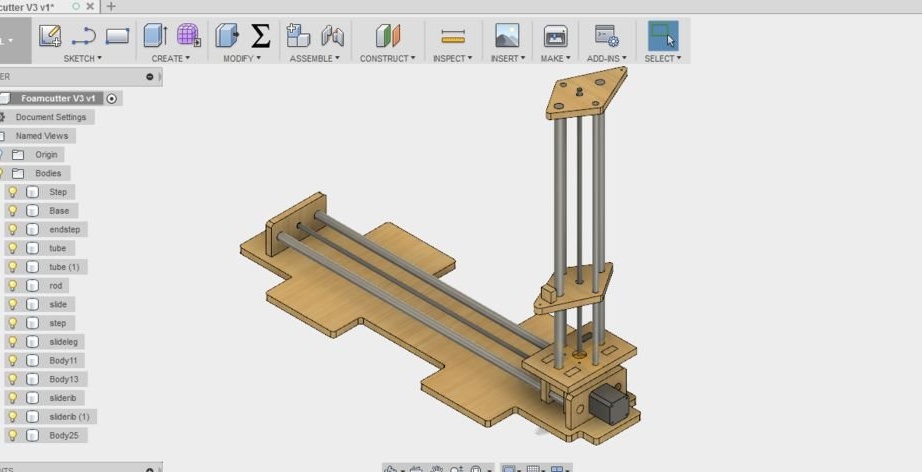
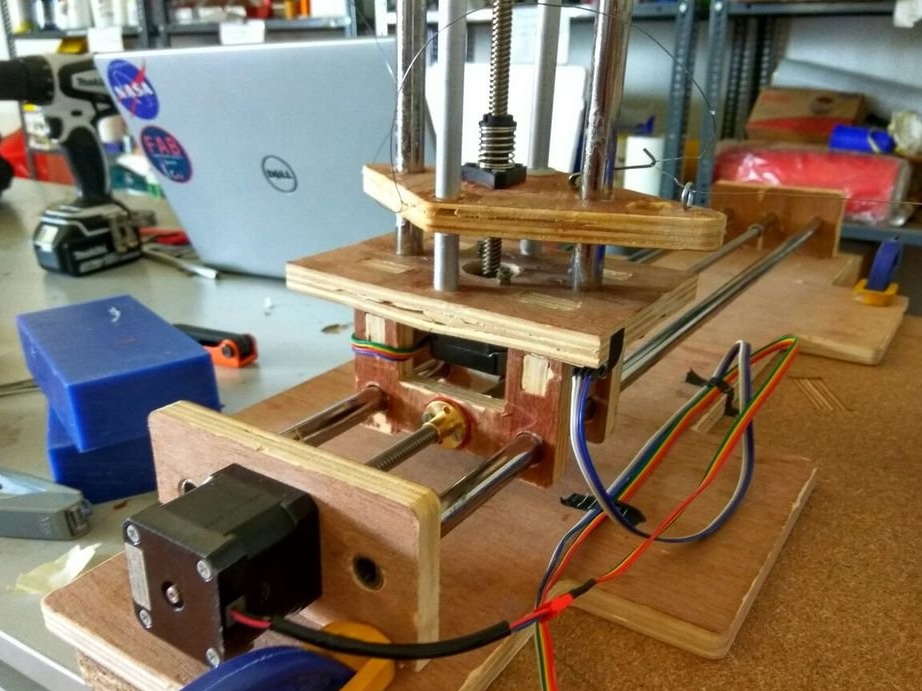
Βήμα δεύτερο: Συγκρότημα μηχανών
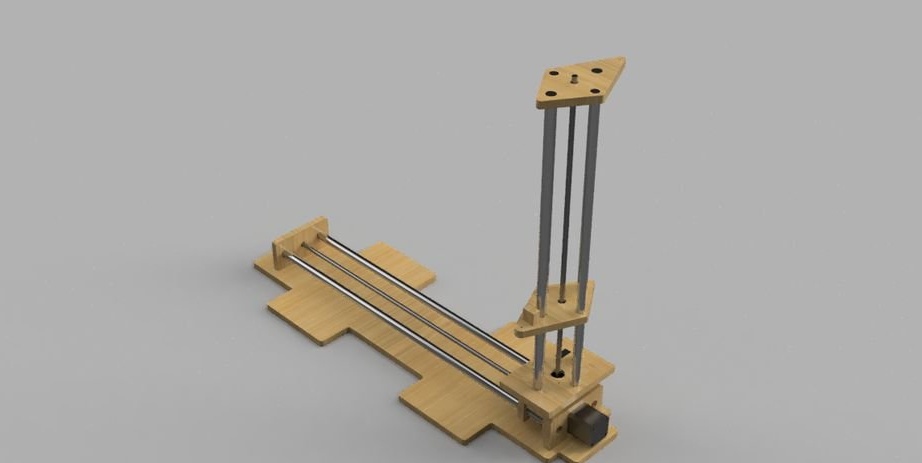
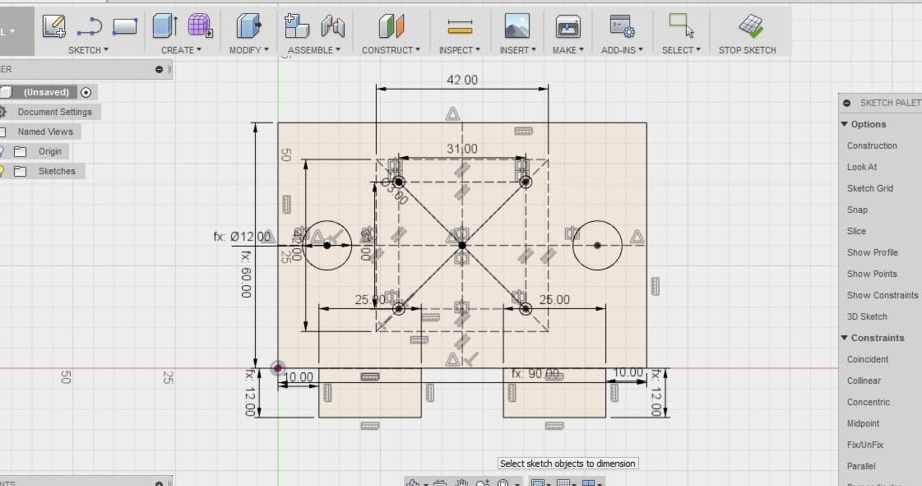
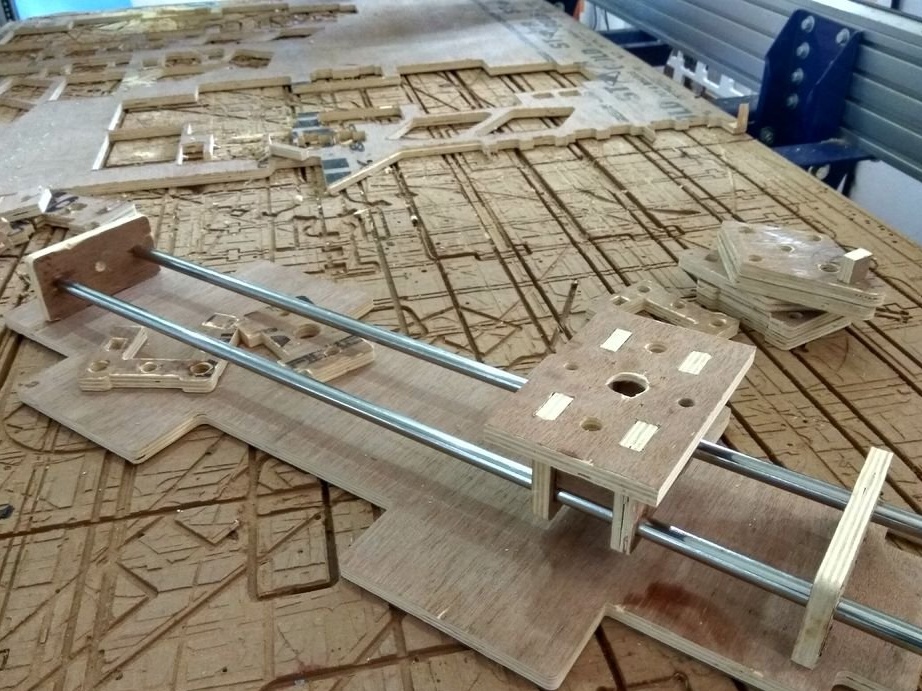
Ο σχεδιασμός είναι κατασκευασμένος από κόντρα πλακέ 12mm, το γραμμικό συγκρότημα είναι κατασκευασμένο από χαλύβδινους σωλήνες διαμέτρου 1/2 ίντσας με συρόμενες πλάκες από κόντρα πλακέ. Ο σχεδιασμός των ολισθαίνων μπλοκ μπορεί να βελτιωθεί με την εγκατάσταση ενός γραμμικού εδράνου ή μανικιού.Δεδομένου ότι ο πλοίαρχος χρησιμοποιεί βίδα, έχει αρκετή ροπή για να ξεπεράσει την τριβή χωρίς ρουλεμάν. Δύο χαλύβδινοι σωλήνες στηρίζουν και συγκρατούν το μπλοκ οδηγών στον ίδιο άξονα.
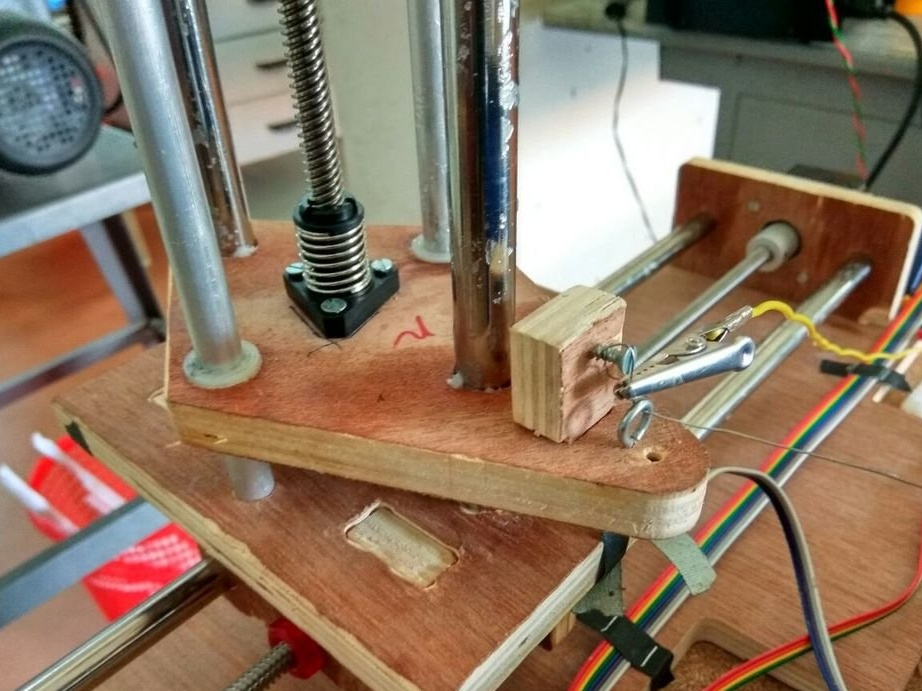
Κάθετες κολόνες τοποθετούνται πάνω από το οριζόντιο μπλοκ οδηγού. Έχει τέσσερις σωληνώσεις.
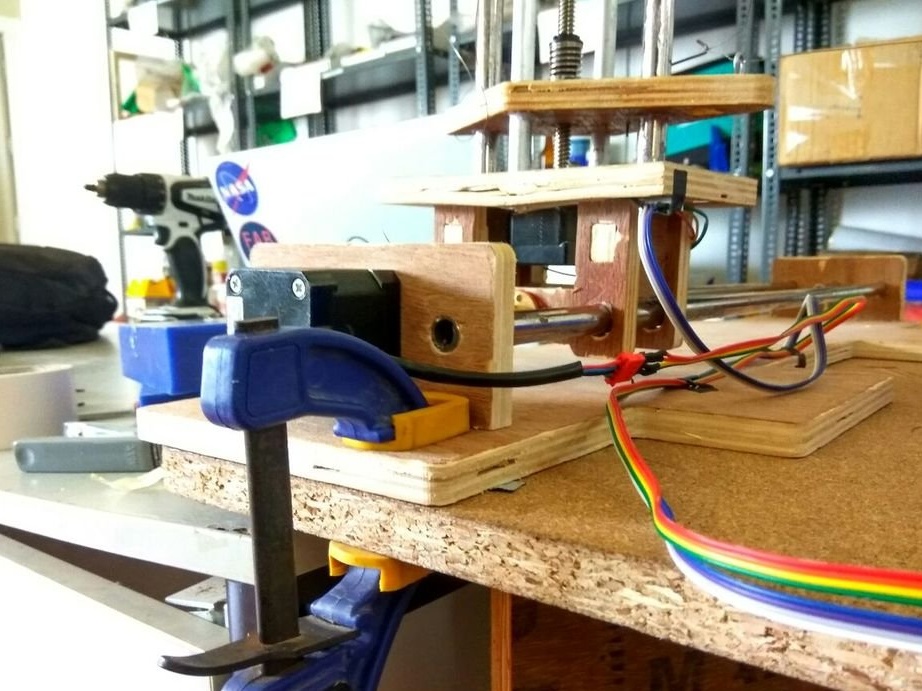
Η βίδα κίνησης είναι προσαρτημένη στο βηματικό μοτέρ χρησιμοποιώντας έναν εύκαμπτο σύνδεσμο. Αυτό βοηθά με οποιαδήποτε ελαφρά ευθυγράμμιση του άξονα και του κοχλία. Ο ορθοστάτης διαθέτει βηματικό μοτέρ με ενσωματωμένη βίδα οδηγήσεως, η οποία μπορεί να αγοραστεί ή να αντικατασταθεί με συμβατικό βηματικό μοτέρ και συμπλέκτη.
Οι δύο στάσεις του μηχανήματος είναι πανομοιότυπες. Στη βάση υπάρχει μια θέση για την τοποθέτηση του μηχανήματος στην επιφάνεια εργασίας.


Σημείωση Όταν χρησιμοποιείτε απλά ρουλεμάν, ανάλογα με το υλικό, μπορεί να συμβεί ένα φαινόμενο που ονομάζεται «κολλήσει και ολίσθηση». Αυτό μπορεί να προκαλέσει ανομοιόμορφη κίνηση και να προκαλέσει δονήσεις. Μπορεί επίσης να οδηγήσει σε εμπλοκή, με αποτέλεσμα υπερβολικά φορτία και παραλείπονται βήματα κατά τη χρήση ενός βηματικού μοτέρ.
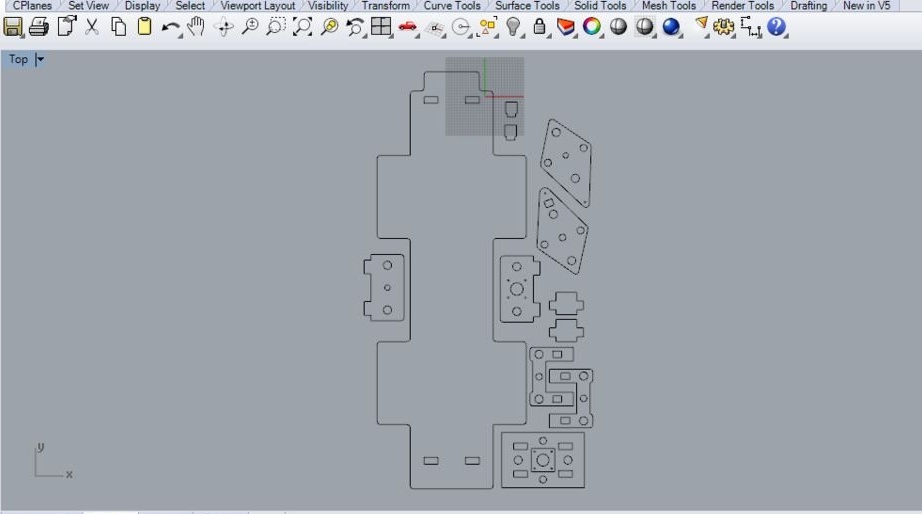
Foamcutter_base.dxf
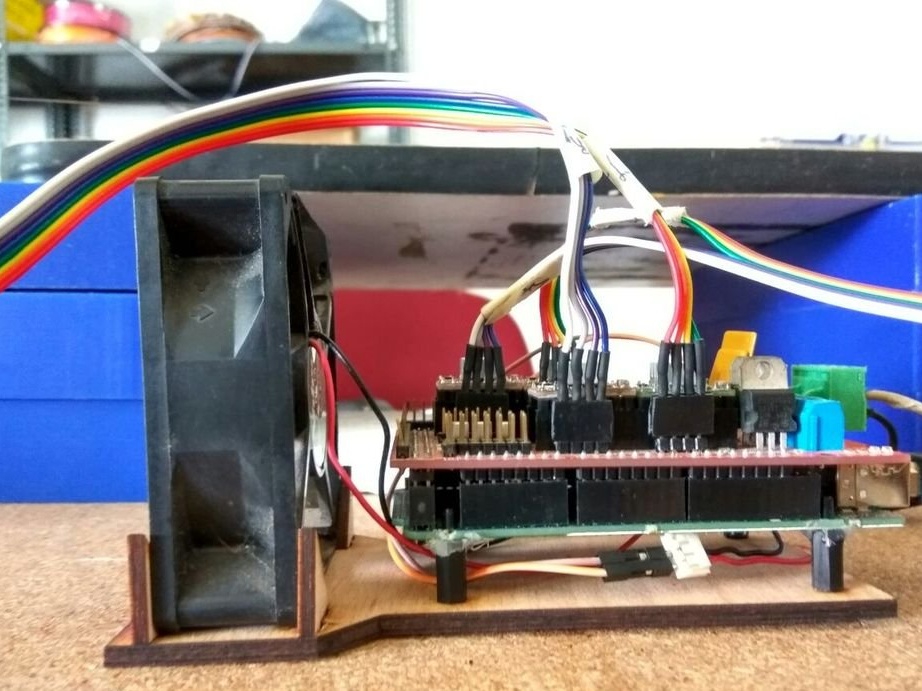
Βήμα τρίτο: Σύνδεση ηλεκτρονικών συσκευών
Το επόμενο βήμα είναι να συνδέσετε τα ηλεκτρονικά, να μετακινήσετε τους κινητήρες και να ρυθμίσετε το μηχάνημα. Υπάρχουν 4 βηματικοί κινητήρες που πρέπει να συνδεθούν με την πλατφόρμα Ramps. Τα καλώδια πρέπει να τοποθετηθούν σε όλη τη διαδρομή για να εξασφαλιστεί επαρκής κίνηση άξονα.
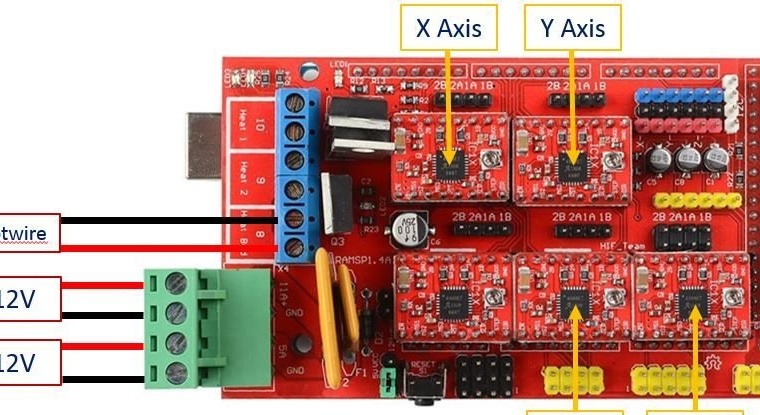
Όλες οι καλωδιώσεις συνδέονται με την πλακέτα Ramps, η οποία είναι μια οθόνη CNC για το Arduino Mega2560. Το Ramp μπορεί να υποστηρίξει έως και 5 οδηγούς μοτέρ βηματικών όπως το A4988. Ο πλοίαρχος χρησιμοποιεί κινητήρες Nema 17.
Πριν από την εγκατάσταση σε μια πλατφόρμα Ramps, βεβαιωθείτε ότι το τσιπ A4988 είναι προσανατολισμένο σωστά. Κάθε βηματικός κινητήρας μπορεί να τραβήξει μέχρι 2 Α, οι οδηγοί βηματικών κινητήρων είναι εξοπλισμένοι με θερμαντικά σώματα για διαρροή θερμότητας. Ο πίνακας διαθέτει επίσης ένα MOSFET 11A για τον έλεγχο της θερμοκρασίας του καλωδίου που συνδέεται με τον ακροδέκτη D8. Όλα τα εξαρτήματα της πλακέτας θερμαίνονται, βεβαιωθείτε ότι έχετε εξασφαλίσει την κατάλληλη ψύξη.
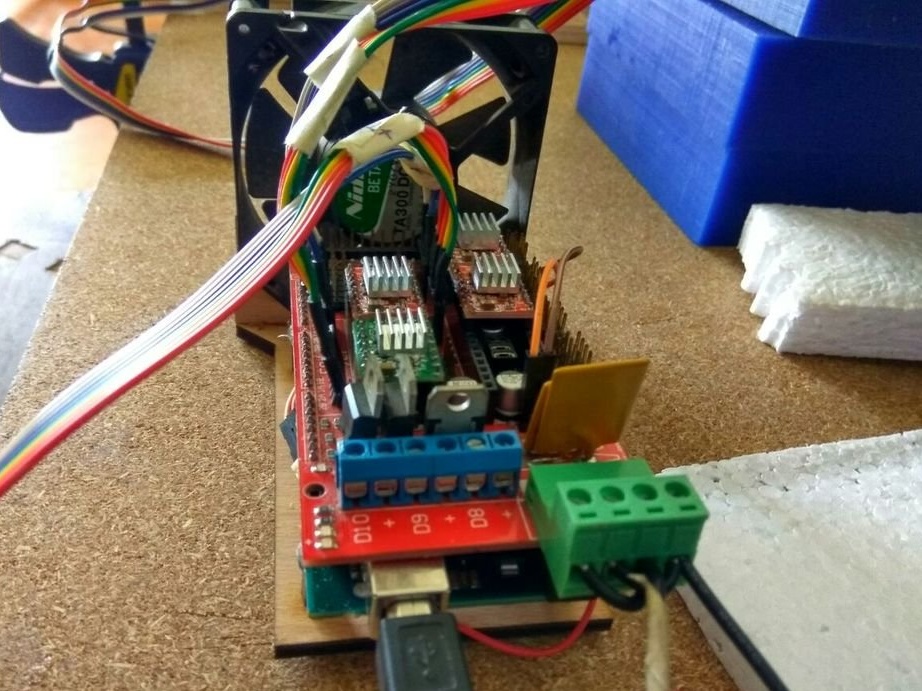
Όταν το σύστημα είναι ενεργοποιημένο, οι βηματικοί κινητήρες συνεχίζουν να αντλούν ρεύμα για να διατηρήσουν τη θέση συγκράτησής τους. Τα εξαρτήματα όπως οι οδηγοί Stepper και MOSFET μπορούν να γίνουν πολύ καυτά κατά τη διάρκεια της λειτουργίας. Μη χρησιμοποιείτε Ράμπες χωρίς ενεργή ψύξη.
Το κύριο λέιζερ κόβει τη βάση για Arduino και Ramps και συνδέει έναν ανεμιστήρα 12V για να παρέχει ενεργή ψύξη για το σκάφος.
Βήμα τέσσερα: Ρύθμιση
Κάθε CNC πρέπει να ρυθμιστεί σωστά πριν ξεκινήσετε την εργασία. Επειδή οι βηματικοί κινητήρες χρησιμοποιούνται σε ένα σύστημα ανοιχτού βρόχου (χωρίς ανατροφοδότηση), πρέπει να γνωρίζετε πόσο μακριά θα μετακινηθεί το φορείο με κάθε περιστροφή του βηματικού μοτέρ. Εξαρτάται από τον αριθμό των βημάτων ανά περιστροφή του κινητήρα, το βήμα του άξονα και το επίπεδο μικροδιακοπής που χρησιμοποιείται.
steps_per_mm = (motor_steps_per_rev * driver_microstep) / thread_pitchΧρησιμοποιεί ένα βηματικό μοτέρ με βήμα 200 σ.α.λ. που οδηγείται από τον οδηγό A4988 σε 1/16 microstep, με βίδα οδηγήσεως σε βήματα 2 mm.
Steps_per_mm = (200 * 16) / 2 = 1600Η βίδα που χρησιμοποίησε ο πλοίαρχος ήταν διπλής όψης, οπότε η τιμή θα είναι η μισή από αυτή που αναφέρθηκε παραπάνω, δηλαδή "800". Εάν η βίδα είναι τεσσάρων σταδίων, τότε η τιμή θα είναι το ένα τέταρτο των παραπάνω.
Αφού αναβοσβήνει το Mega 2560 με το αρχείο Grbl8c2MegaRamps, ανοίξτε την οθόνη σειριακής θύρας και εισάγετε το "$$" για να αποκτήσετε πρόσβαση στον πίνακα ρυθμίσεων Grbl. Για να αλλάξετε οποιαδήποτε τιμή, εισαγάγετε $ number = value. Για παράδειγμα, $ 0 = 100 Μετά τη ρύθμιση του μηχανήματος, βεβαιωθείτε ότι το μηχάνημα μετακινεί την ακριβή τιμή όπως φαίνεται στον ελεγκτή.
Βήμα πέντε: Nichrome
Για να κόψετε τον αφρό, χρειάζεστε ένα σύρμα κατασκευασμένο από κατάλληλο υλικό που μπορεί να αντέξει τη θέρμανση και θα έχει την ίδια θερμοκρασία σε όλο το μήκος.
Το Nichrome είναι ένα κατάλληλο υλικό. Είναι καλύτερο να χρησιμοποιήσετε όσο το δυνατόν λεπτό σύρμα για να μειώσετε τις αυλακώσεις κατά τη διάρκεια της κοπής και για να εξασφαλίσετε καλές γραμμές κοπής. Κατά κανόνα, όσο μεγαλύτερο είναι το σύρμα, τόσο μεγαλύτερη είναι η τάση που πρέπει να εφαρμοστεί και το παχύτερο σύρμα.
Το επόμενο βήμα είναι να συνδέσετε το σύρμα νοχμόμετρο στο μηχάνημα. Δεδομένου ότι έχουμε 4 ανεξάρτητους άξονες, δεν μπορούμε απλώς να κουμπώσουμε και τα δύο άκρα του σύρματος στα υποστηρίγματα.Το σύρμα πρέπει να έχει κάποια επιμήκυνση, είτε μέσω ενός ελατηρίου, είτε μέσω ενός βάρους προσαρμοσμένου στα άκρα.
Η σταθερή τάση μπορεί να εφαρμοστεί στο σύρμα μέσω ενός ελατηρίου με σταθερή δύναμη ή με ένα κρεμαστό βάρος στο τέλος. Ένας φθηνός τρόπος για να πάρετε μια πηγή με συνεχή δύναμη είναι να χρησιμοποιήσετε Πηνία ταυτότητας.

Βήμα έξι: Δημιουργία λογισμικού και κώδικα G
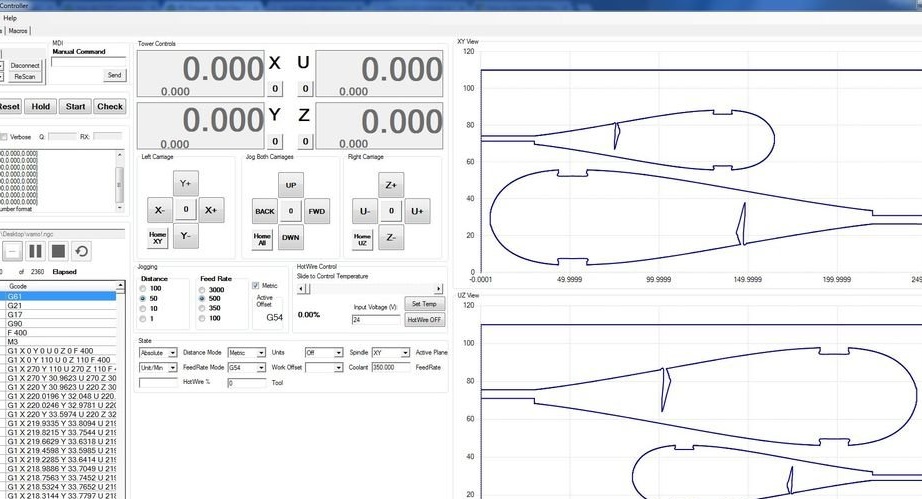
Grbl Hotwire Controller
Ο οδηγός χρησιμοποιεί τον πίνακα ελέγχου Grbl, που αναπτύχθηκε από τον Garret Visser, ο οποίος προσαρμόστηκε για κοπή από το Hotwire από τον Daniel Rassio. Ο πίνακας έχει ανεξάρτητο έλεγχο λειτουργίας για όλους τους άξονες. Υπάρχει επίσης ένα εργαλείο απεικόνισης, ένα γράφημα "Gcode" και η δυνατότητα αποθήκευσης των μακροεντολών σας. Η θερμοκρασία ζεστού καλωδίου μπορεί να ελεγχθεί χρησιμοποιώντας το M3 / M5 για να ενεργοποιηθεί / απενεργοποιηθεί και η εντολή S "xxx" να ρυθμίσει την τάση εξόδου, είτε με το χέρι είτε με τη γραμμή κύλισης στο λογισμικό. Το ζεστό καλώδιο πρέπει να συνδέεται στην έξοδο "D8" και να τροφοδοτείται από μια πηγή τροφοδοσίας συνδεδεμένη στην είσοδο "11A" στις διακλαδώσεις γραμμής.
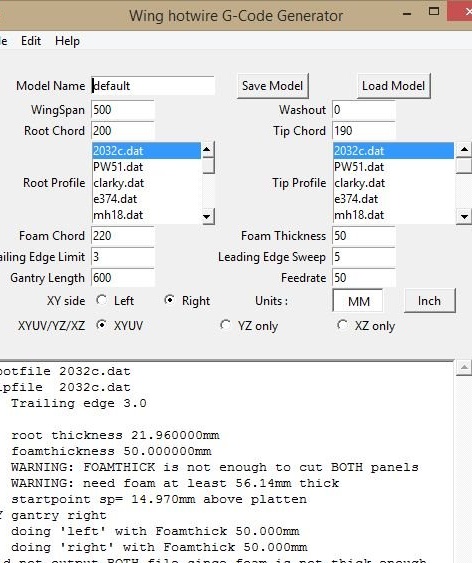
Γέφυρα γεννήτριας κώδικα g
Γέφυρα γεννήτριας κώδικα g είναι ένα πρόγραμμα για τη δημιουργία του κώδικα XYUV GY για θερμή κοπή των πτερυγίων μοντέλου αεροπλάνου. Εκτελείται με Python 2.7 και μπορεί επίσης να ενσωματωθεί με τη διεπαφή του LinuxCNC Axis. Υπάρχει επίσης μια ηλεκτρονική έκδοση. Αυτό σας επιτρέπει να εισάγετε διάφορες παραμέτρους της πτέρυγας. Υπάρχει μια βάση δεδομένων αεροδυναμικών προφίλ σε μορφή .dat. Μπορείτε να εισάγετε νέα προφίλ με τον ίδιο τρόπο.
Αυτό το λογισμικό είναι εύκολο στη χρήση και υποστηρίζει τη στρωμάτωση των πτερυγίων στο ίδιο κομμάτι αφρού για εξοικονόμηση υλικού. Ο κωδικός G εξόδου μπορεί να σταλεί στο μηχάνημα μέσω του ελεγκτή Grbl.
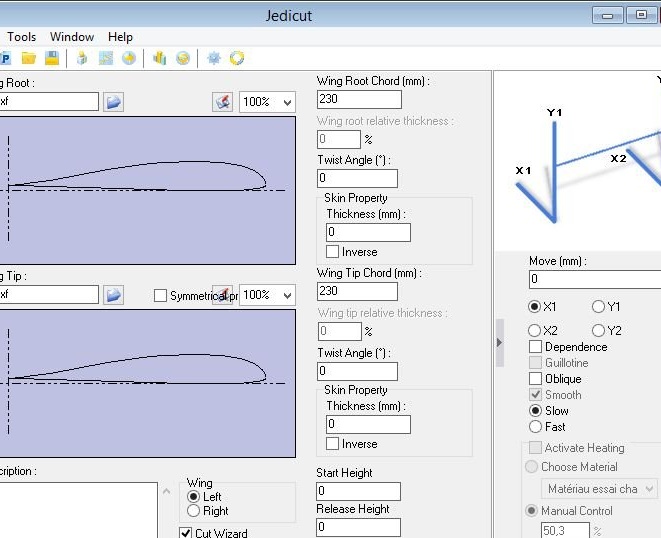
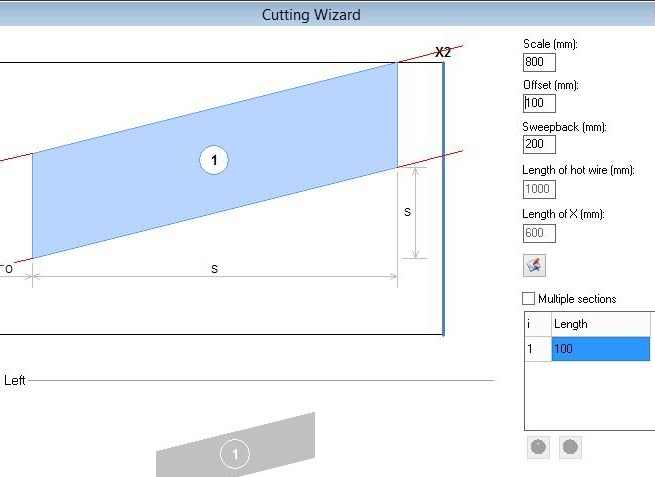
2.4 Jedicut
Jedicut - Αυτό είναι ένα δροσερό πρόγραμμα που μπορεί να εκτελέσει και τα δύο CAD / CAM και να εκτελέσει τις λειτουργίες ενός ελεγκτή μηχανής. Υπάρχει επίσης ένα plugin για τη δημιουργία του G-code. Αυτό δεν είναι το ευκολότερο πρόγραμμα ρύθμισης παραμέτρων. Ορισμένες από τις επιλογές και τα μηνύματα σφάλματος είναι στα γαλλικά, αλλά αν εργάζεστε με αυτό για κάποιο χρονικό διάστημα, μπορείτε να το λειτουργήσετε.
Ο G-κώδικας του Wing παράγει κώδικες G σε απόλυτη κατάσταση λειτουργίας, ο οποίος εκτελείται στο Grbl χωρίς κανένα πρόβλημα, αλλά ο Jedicut παράγει G-code σε διαδοχική κατάσταση. Ο πλοίαρχος αντιμετώπιζε δυσκολίες στην πρώτη εκκίνηση, όταν το αυτοκίνητο απλά μετακόμισε μπρος-πίσω. Εάν συμβεί αυτό, επεξεργαστείτε τον κώδικα G για να καταργήσετε τις περιττές γραμμές στην κεφαλίδα.
Τόσο ο κώδικας Wing G όσο και ο Jedicut παράγουν κώδικα G με κάποιους μη υποστηριζόμενους κώδικες Grbl στην κεφαλίδα. Ο ελεγκτής θα εμφανιστεί στην οθόνη όταν προκύψουν τέτοια σφάλματα. Επεξεργαστείτε τον κωδικό G και διαγράψτε τις περιττές γραμμές κώδικα.
Οι λειτουργικοί G κώδικες και με τα δύο προγράμματα περιλαμβάνονται, χρησιμοποιήστε τους για να ελέγξετε τον ελεγκτή.
Jedicut.rar
winggcode.rar
Έβδομο βήμα: ρύθμιση ρυθμού τροφοδοσίας και θερμοκρασίας
Σε αντίθεση με τη συμβατική άλεση, το σύρμα κόβει με τήξη αφρού. Όταν το σύρμα παραμείνει σε μια θέση για κάποιο χρονικό διάστημα, το περιβάλλον υλικό συνεχίζει να τήκεται. Αυτό αυξάνει την αυλάκωση της κοπής και προκαλεί ανακρίβειες στο μέγεθος. Υπάρχουν δύο μεταβλητές που επηρεάζουν το πλάτος της περικοπής.
Κοπή τροφοδοσίας.
Θερμοκρασία σύρματος.
Ο ρυθμός τροφοδοσίας κοπής είναι η ταχύτητα με την οποία το σύρμα κόβει το υλικό, κατά προτίμηση σε mm / min. Όσο υψηλότερη είναι η ταχύτητα, τόσο μικρότερη είναι η υποδοχή, αλλά όσο υψηλότερη είναι η απαιτούμενη θερμοκρασία, τόσο μεγαλύτερη είναι η τάση στο σύρμα. Οι καλές ταχύτητες εκκίνησης κυμαίνονται από 350 έως 500 mm / min.
Η θερμοκρασία του καλωδίου πρέπει να είναι ελαφρώς υψηλότερη από τη θερμοκρασία τήξης του αφρού. Η θερμοκρασία ελέγχεται από το ρεύμα που ρέει μέσω του σύρματος.
Υπάρχει λογισμικό που επιτρέπει τον έλεγχο PWM του καλωδίου για να το θερμαίνει στις σωστές στιγμές, προκειμένου να βελτιστοποιηθεί ο ρυθμός τροφοδοσίας κοπής. Η θερμοκρασία του καλωδίου καθορίζεται από το τετράγωνο της τρέχουσας κατάστασης της αντίστασης.
Υπάρχει μια ειδική αριθμομηχανήόπου μπορείτε να κάνετε όλους τους απαραίτητους υπολογισμούς.
Βήμα Οκτώ: Λειτουργία μηχανής
Η διαδικασία ξεκινά με ένα σχέδιο που εξάγεται ως αρχείο DXF. Αυτό το αρχείο εισάγεται στη συνέχεια στο λογισμικό CAM και εξάγεται ως G-code. Το μηχάνημα είναι ενεργοποιημένο και βαθμονομημένο. Το υλικό τοποθετείται σε πάγκο εργασίας και ρυθμίζεται η θέση εκκίνησης. Εκτελέστε το αρχείο G-code και δείτε πώς η συσκευή κάνει όλη τη δουλειά για εσάς.
Σύμφωνα με τον πλοίαρχο, η μηχανή είναι εύκολη στην κατασκευή και διευκολύνει την εργασία των μοντέλων αεροσκαφών.




Στο παρακάτω βίντεο μπορείτε να δείτε ένα παράδειγμα του μηχανήματος.