
Μια ενδιαφέρουσα συσκευή εφευρέθηκε και κατασκευάστηκε από τον Δάσκαλο, αυτή είναι μια συσκευή για σύρμα κάμψης οποιουδήποτε σχήματος. Η κατασκευή ελατηρίων είναι ένα από τα χαρακτηριστικά του. Αυτό το μηχάνημα μπορεί να κάμπτει σύρμα 0,8 / 0,9 / 1 mm σε οποιοδήποτε σχήμα 2D.
Ο κύριος στόχος της κατασκευής αυτής της μηχανής ήταν να αυτοματοποιήσει τη διαδικασία κάμψης. Άλλες σπιτικές μηχανές δεν είναι πολύ ακριβείς και οι κάμψεις τους έχουν αρκετά μεγάλη ακτίνα.
Ο δεύτερος στόχος ήταν να γίνει όσο το δυνατόν απλούστερη η χρήση κοινώς διαθέσιμων εξαρτημάτων και εξαρτημάτων. Ορισμένα μέρη του μηχανήματος εκτυπώνονται σε έναν εκτυπωτή 3D και μεταλλικά μέρη μπορούν να αγοραστούν στο κατάστημα.
Ποιος είναι ο κύριος για μια τέτοια μηχανή; Ενδιαφέρεται για τη δημιουργία στοιχείων LED, νιφάδες χιονιού, αστέρια, λουλούδια κ.λπ. Κατά την κατασκευή τους χρειάζονται όμοια μέρη από σύρμα, και αυτό το μηχάνημα θα διευκολύνει την κατασκευή τους.
Ας δούμε ένα σύντομο βίντεο με ένα παράδειγμα της συσκευής.
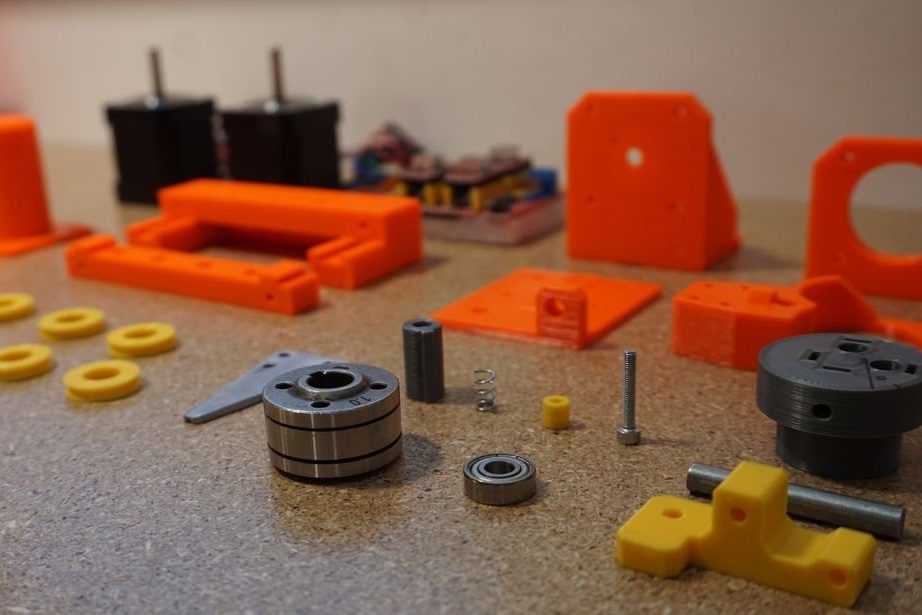
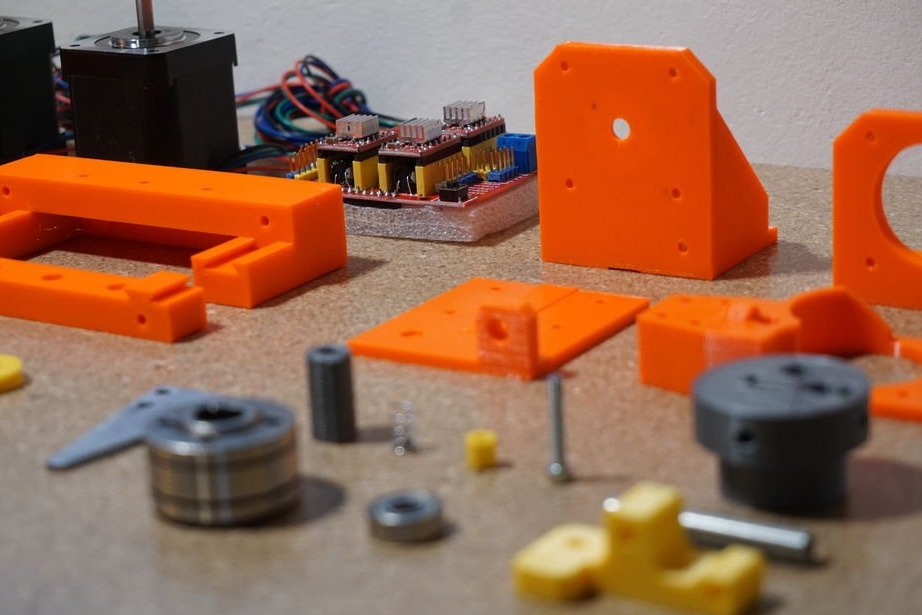
Έτσι, για την κατασκευή μιας τέτοιας μηχανής, ο πλοίαρχος χρησιμοποίησε τα εξής
Εργαλεία και υλικά:
-3D λεπτομέρειες (τα αρχεία εκτύπωσης μπορούν να μεταφορτωθούν εδώ);
-Συνδέσεις.
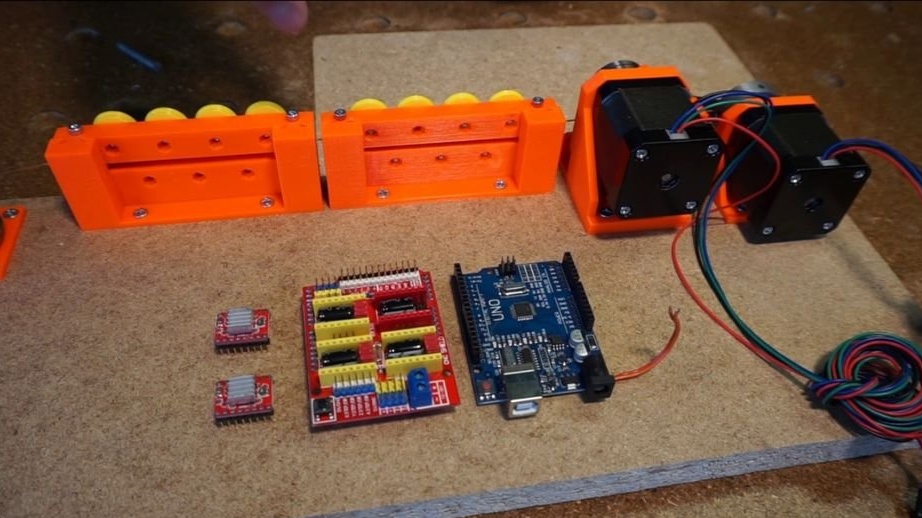
-Arduino UNO;
-Αναπτυσσόμενη σανίδα για το Arduino UNO.
-Το πρόγραμμα οδήγησης A4988 -2 τεμάχια.
-Κάση κινητήρα NEMA17 -2 τεμάχια.
-12V 3A τροφοδοσία ρεύματος?
- μηχανισμός τροφοδοσίας συρμάτων ·
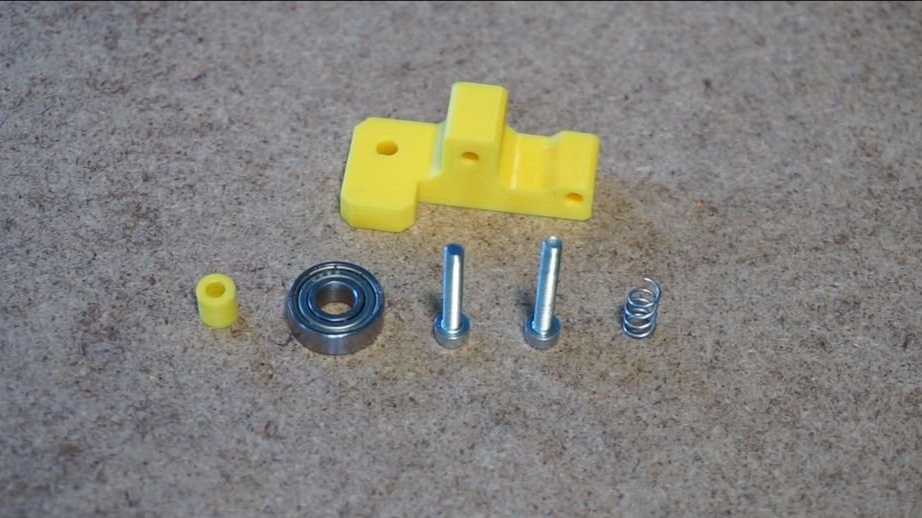
-Ελατήριο ελατηρίου 4x6 mm.
- Έδρανο 3x10x4 mm.
-Κάτος 6x15x4 mm.
-6 mm χάλυβα ράβδος?
- Χαλύβδινο φύλλο πάχους 2 mm.
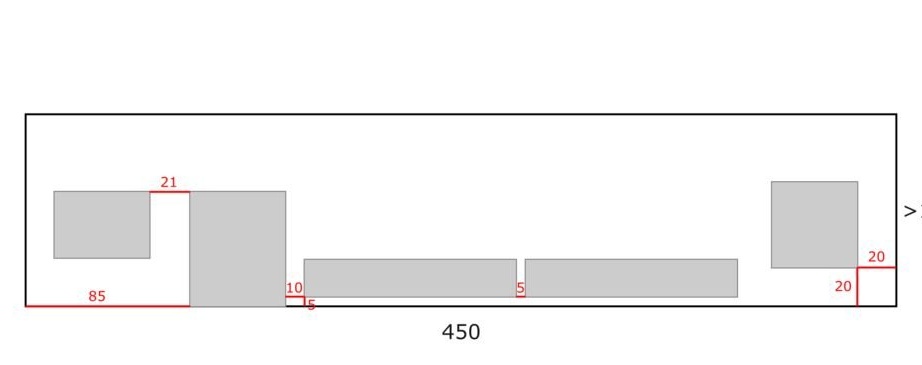
-Πίνακα ξύλου για τη βάση 450x100 mm.
- κατσαβίδι ·
-Gon;
Βήμα πρώτο: Πώς λειτουργεί
Ας δούμε πώς λειτουργεί το μηχάνημα (από τα δεξιά προς τα αριστερά).
Βάση καρουλιού - κρατάει το καρούλι του καλωδίου για την επεξεργασία του μηχανήματος.
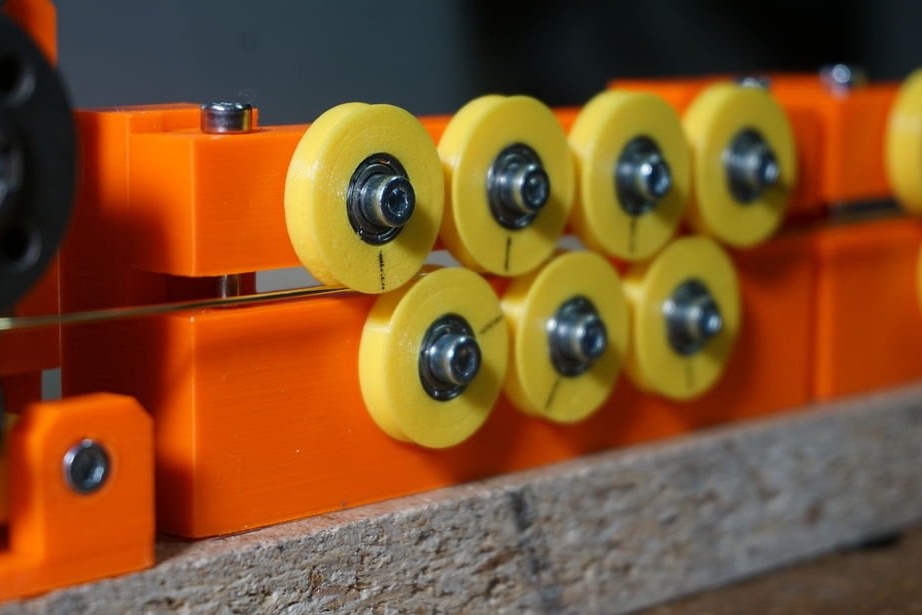
Ανορθωτής - ένα σύνολο 7 κυλίνδρων έτσι ώστε το σύρμα να είναι όσο το δυνατόν πιο ορατό. Η εργασία με ευθύγραμμο σύρμα είναι κρίσιμη. Γι 'αυτό δύο ανορθωτές.
Broach - μπορείτε να βρείτε έναν παρόμοιο μηχανισμό στον εκτυπωτή σας 3D. Ένα σύνολο γραναζιών τραβά το σύρμα από τον κύλινδρο μέσω των κυλίνδρων και τον ωθεί στην κεφαλή κάμψης. Ο μηχανισμός τροφοδοσίας πρέπει να έχει αρκετή πίεση σύρματος ώστε να μην γλιστράει. Περισσότερα για αυτό αργότερα.
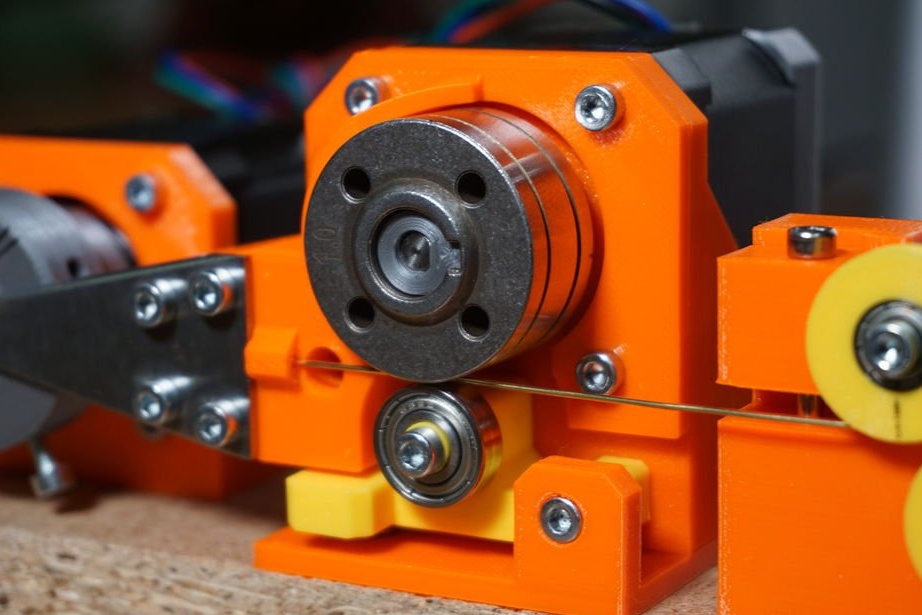
Μηχανή κάμψης - κάμπτεται το καλώδιο σε προγραμματισμένη μορφή.
Όλα αυτά ελέγχονται από έναν UN Arduino με ασπίδα CNC.Μια εντολή αποστέλλεται στο Arduino από τον υπολογιστή και μεταφράζεται σε εντολές για βηματικούς κινητήρες.

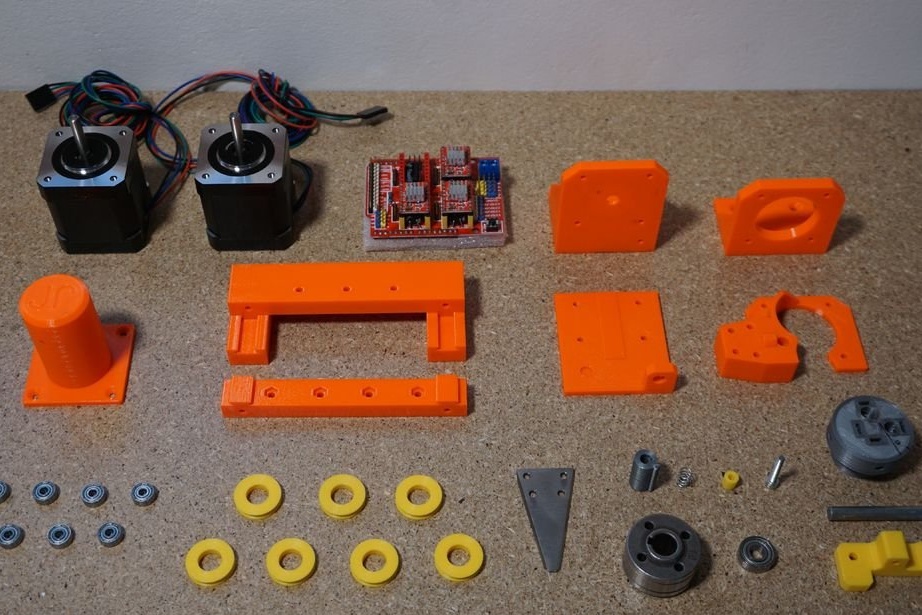
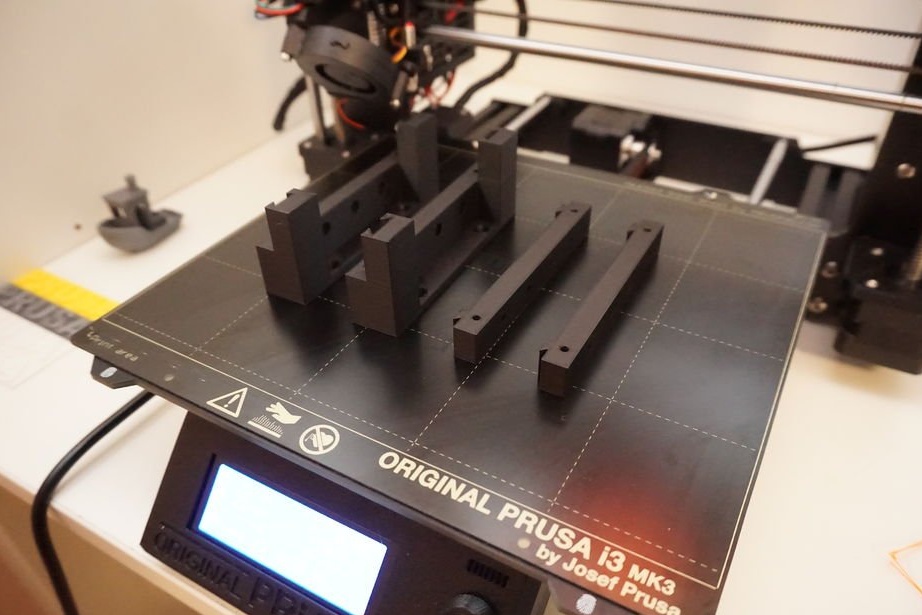
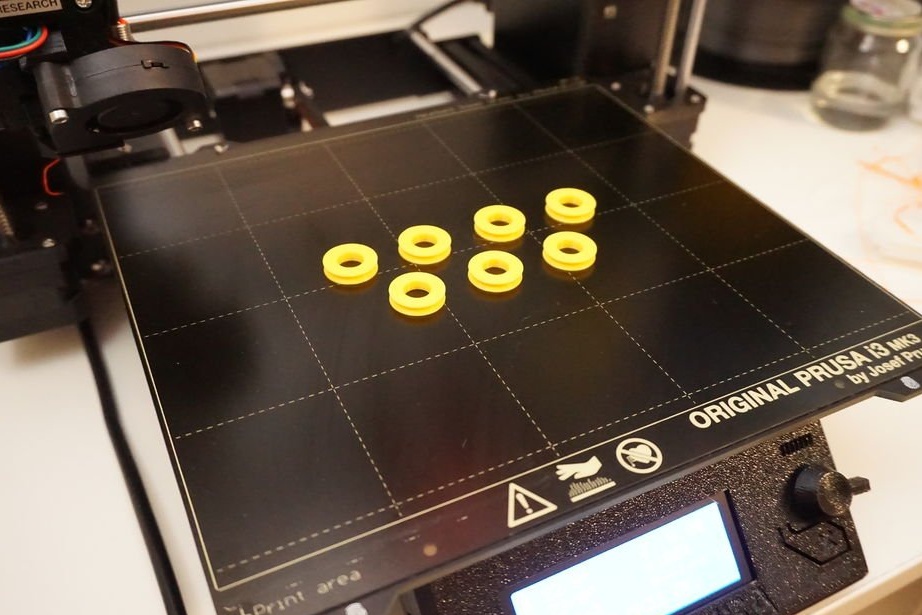
Βήμα δεύτερο: Εκτύπωση εξαρτημάτων
Πρέπει να εκτυπώσετε τα παρακάτω στοιχεία και την ακόλουθη ποσότητα (για να αποφύγετε τη σύγχυση, το αρχικό κείμενο):
Bender
Κεφαλή εργαλείου
Κορνίζα κινητήρα
Feeeder
Κορνίζα κινητήρα
Κάτω πλαίσιο
Οδηγός καλωδίων
Ελαστικός φορέας οδοντωτών τροχών
Δακτύλιος οδοντωτών τροχών
Διαχωριστικό ταχυτήτων διανομής
Πλάκα κάμψης (πρότυπο)
Ρόλοι ευθυγράμμισης (2x)
Κρεβάτι κρεβάτι (2x)
Κορυφαία ταχύτητα (2x)
Ρολό (14x)
Υποδοχή καρούλι
Ύψος στρώματος κατά την εκτύπωση 0,15 mm. 40% πλήρωση. Η εκτύπωση διαρκεί 2 ημέρες.
Βήμα τρίτο: Μηχανή κάμψης
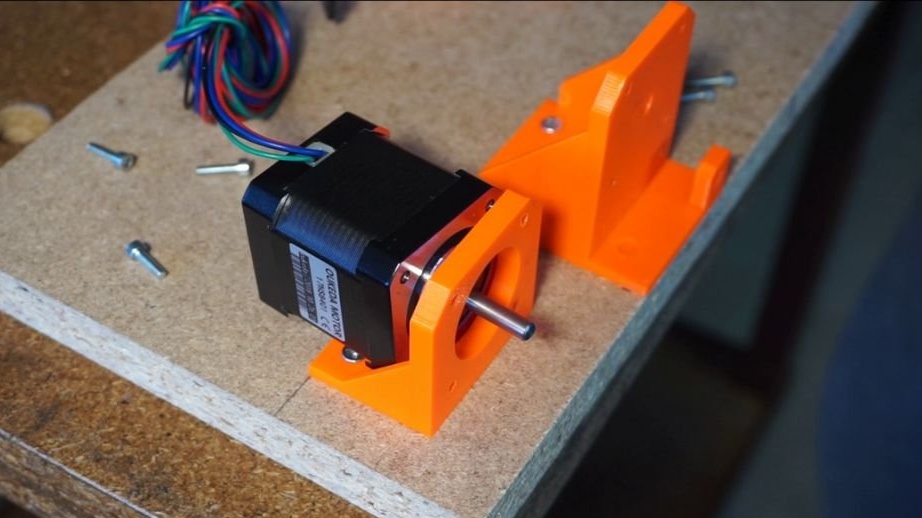
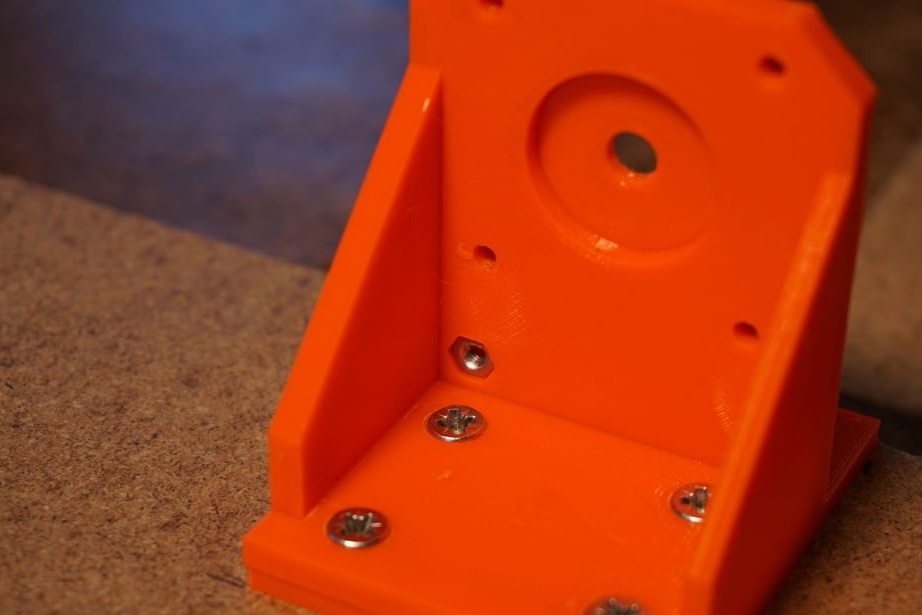
Ο πλοίαρχος βιδώνει δύο πλαίσια στη βάση. Είναι σημαντικό να εγκαταστήσετε και τα δύο πλαίσια όπως φαίνεται στο σχέδιο.
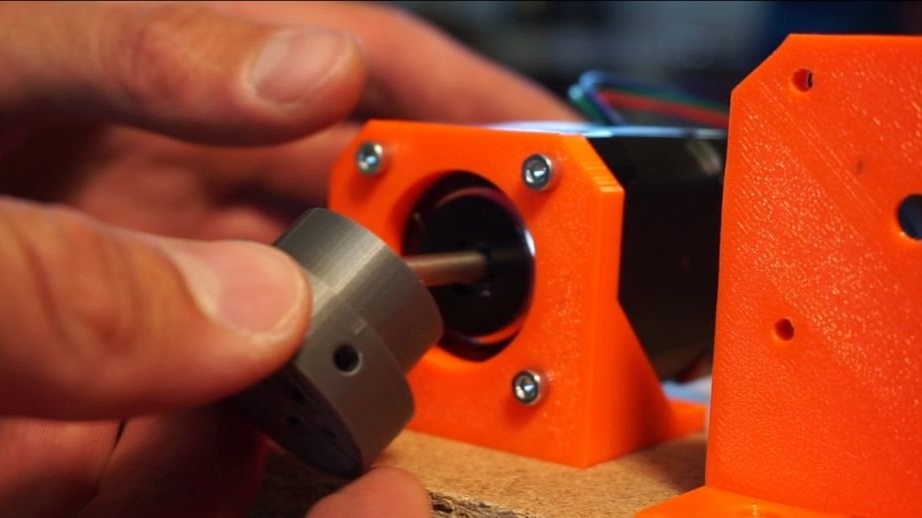
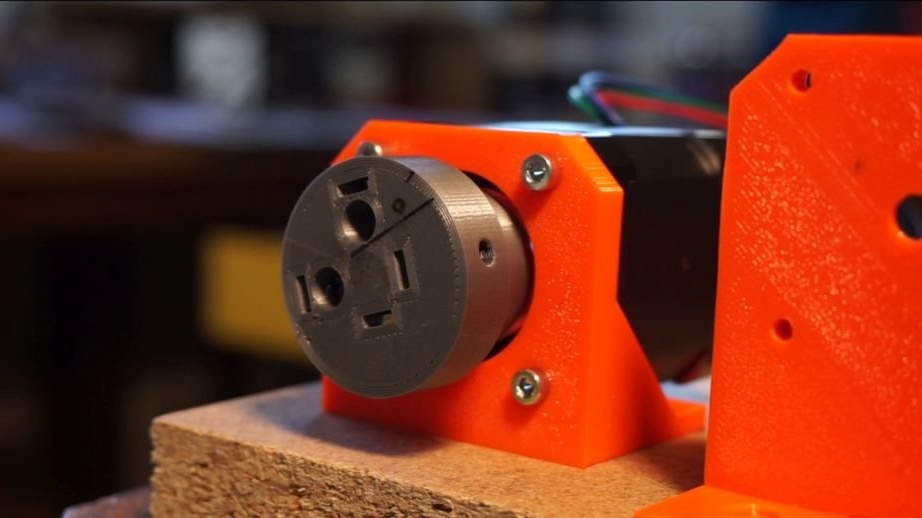
Ασφαλίζει το βηματικό μοτέρ στο πλαίσιο. Ασφαλίζει το κεφάλι στον άξονα του κινητήρα.


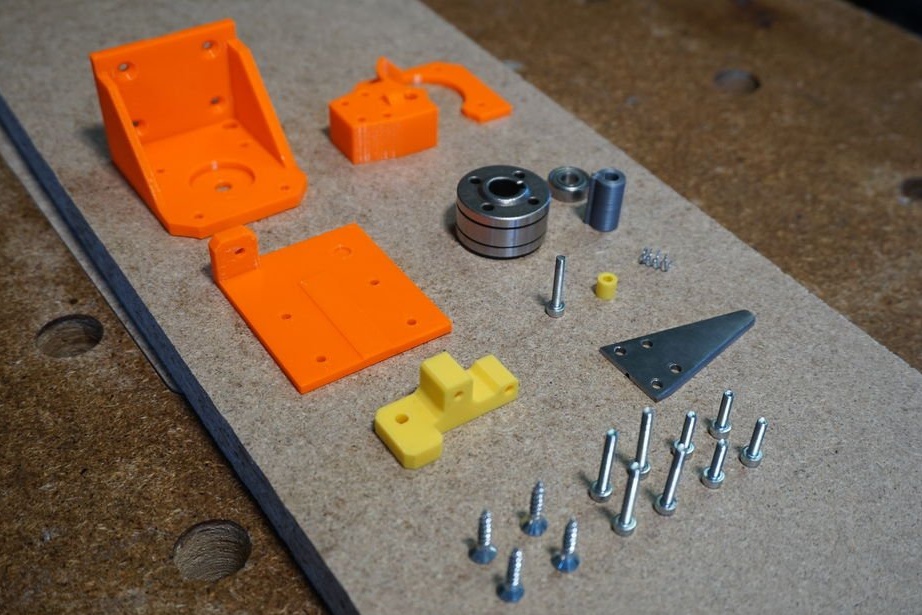
Βήμα τέταρτο: Κούρσα
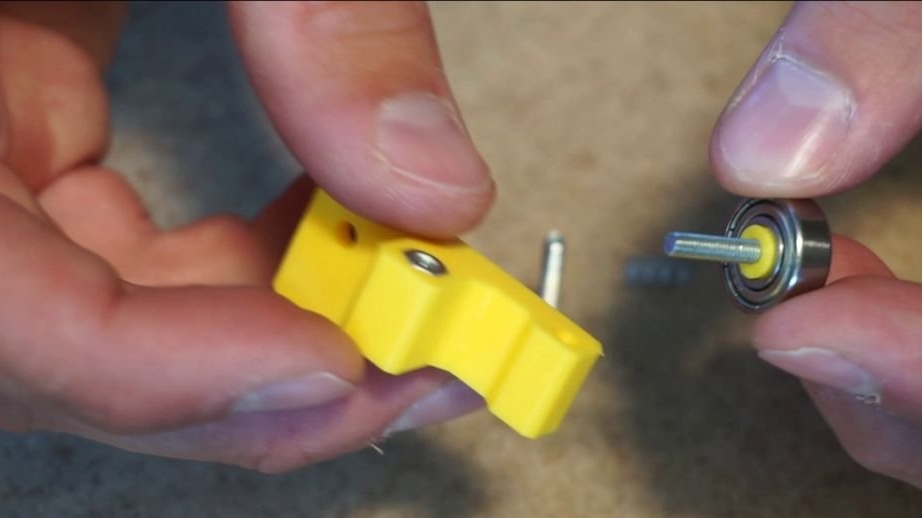
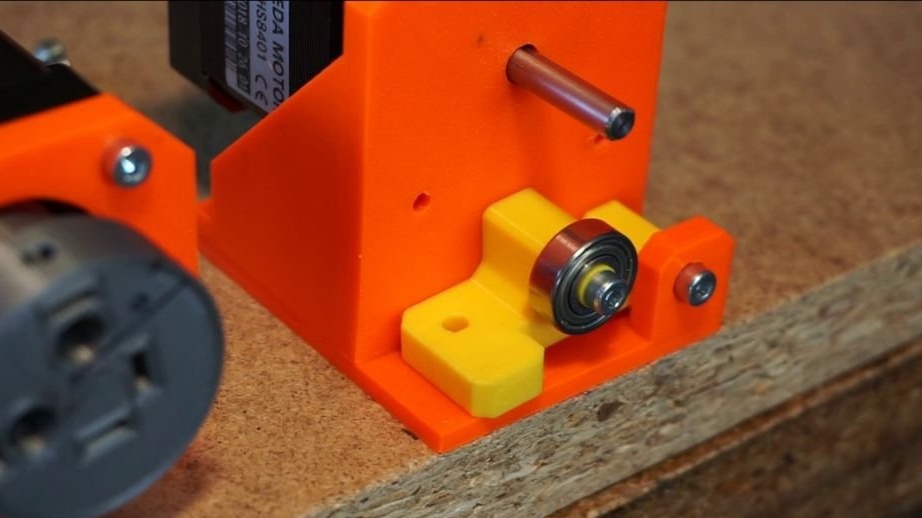
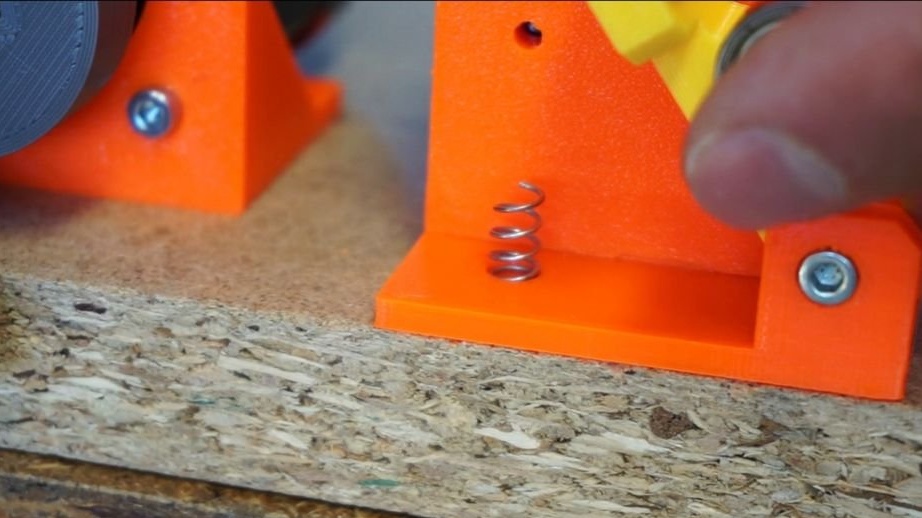
Το πλαίσιο έχει ήδη εγκατασταθεί, οπότε το πρώτο βήμα για τη δημιουργία ενός μηχανισμού τροφοδοσίας είναι η κατασκευή ενός φορέα για την ενδιάμεση ταχύτητα, η οποία θα πιέσει το καλώδιο στον μηχανισμό τροφοδοσίας. Αφαιρέστε το πλαστικό παρέμβυσμα μέσα στο έδρανο 6x15x4 mm. Τοποθετήστε το έδρανο στο μπουλόνι M3x20. Τοποθετήστε το περικόχλιο M3 στο φορείο και βιδώστε το έδρανο στο μπουλόνι. Βεβαιωθείτε ότι το έδρανο περιστρέφεται ελεύθερα. Τοποθετήστε το δεύτερο περικόχλιο M3 στο πλαίσιο του κινητήρα (πλευρά κινητήρα στην κάτω αριστερή γωνία) και βιδώστε το φορείο μέσω του μικρού βραχίονα χρησιμοποιώντας το μπουλόνι M3x20. Μην πιέζετε υπερβολικά το μπουλόνι · ο φορέας πρέπει να κινείται ελεύθερα. Ανασηκώστε το φορείο και τοποθετήστε το ελατήριο στην οπή κάτω από αυτό.
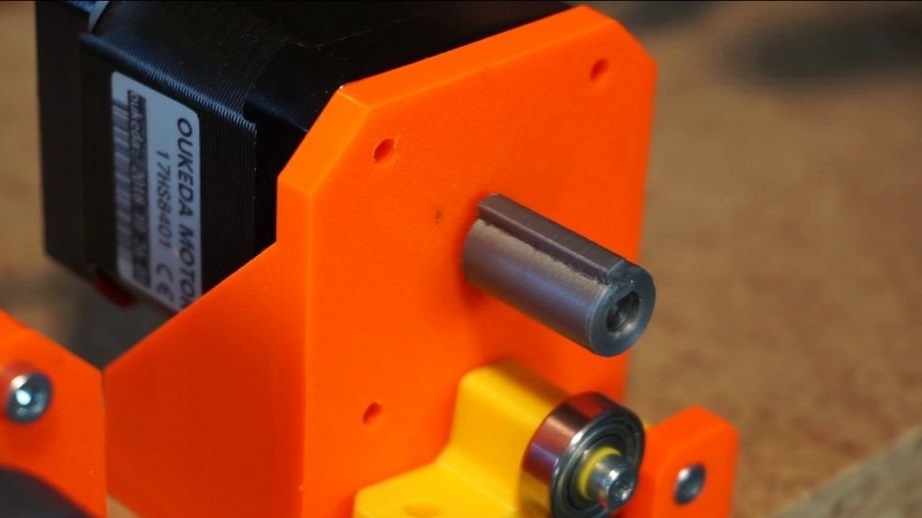
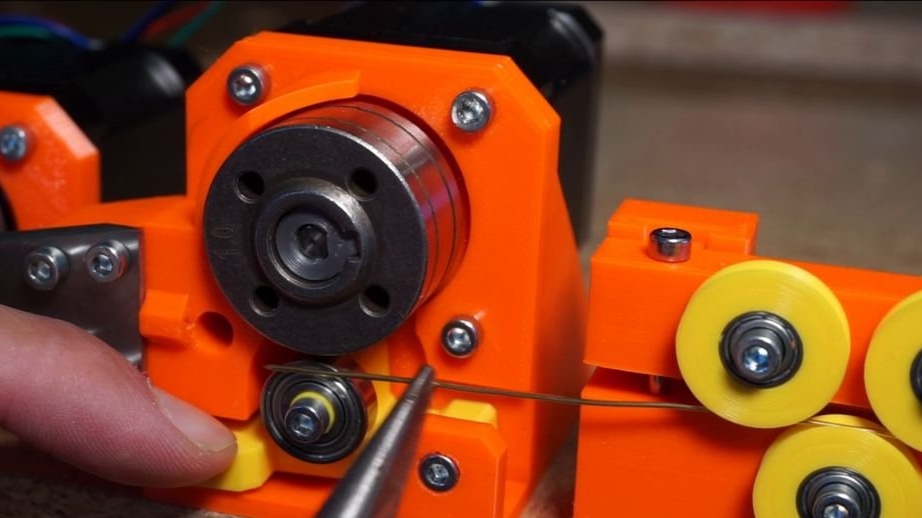
Βγάλτε τον δεύτερο βηματικό μοτέρ και τοποθετήστε τον στο πλαίσιο του κινητήρα. Μη βιδώστε ακόμα. Πιέστε το διαχωριστικό του μηχανισμού τροφοδοσίας στον άξονα του κινητήρα και τοποθετήστε τον μηχανισμό τροφοδοσίας.
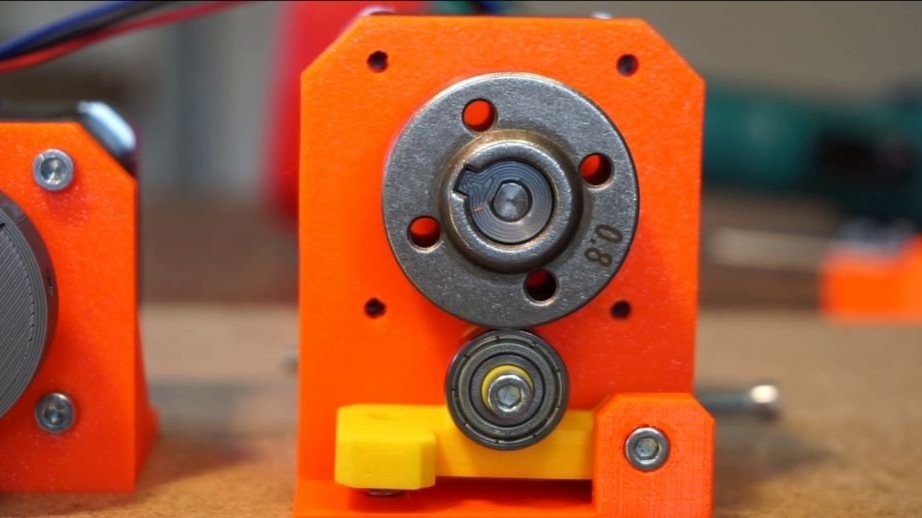
Ο μηχανισμός τροφοδοσίας που χρησιμοποιεί ο πλοίαρχος λαμβάνεται από μηχάνημα συγκόλλησης MIG. Ο μηχανισμός έχει δύο εσοχές στο πηνίο. Ένα για σύρμα 0,8 mm και ένα για σύρμα 1 mm. Σε αντίθεση με τα γρανάζια (προηγουμένως ο πλοίαρχος προσπάθησε να τροφοδοτήσει το σύρμα μαζί τους), αυτός ο μηχανισμός δεν αφήνει σημάδια στο καλώδιο.
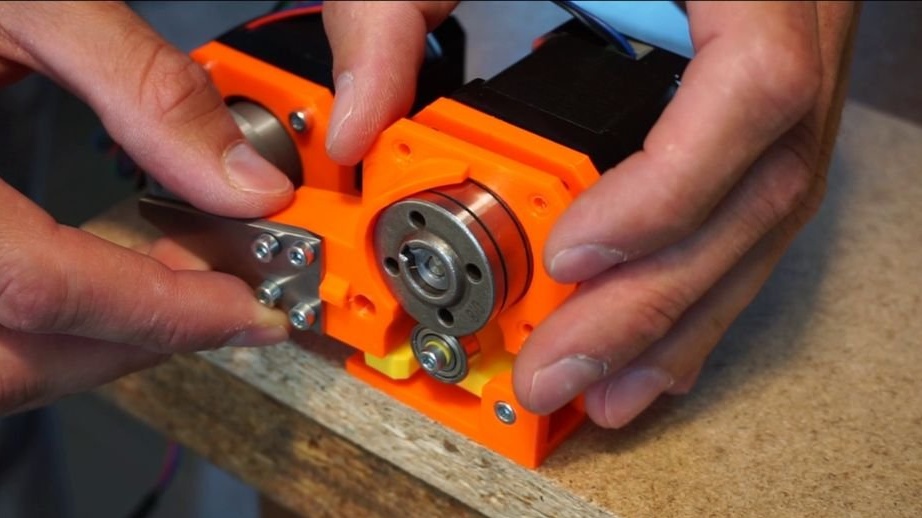
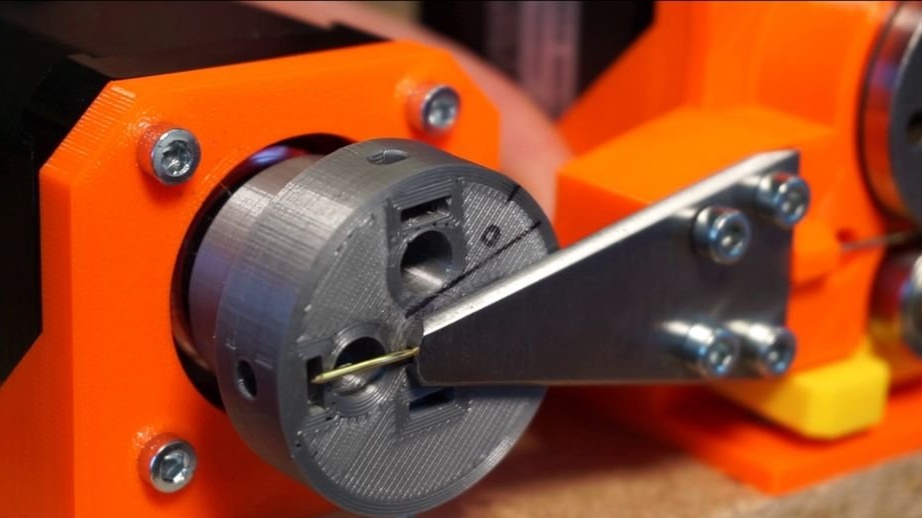
Η συσκευή τροφοδοσίας και κάμψης συνδέεται με πλάκα κάμψης - μεταλλική πλάκα πάχους 2 mm με μικρή αυλάκωση στο πίσω τοίχωμα, η οποία τροφοδοτεί το σύρμα απευθείας στο κέντρο της κεφαλής κάμψης για τέλεια κάμψη. Για εκτύπωση, υπάρχει μια πλαστική κάμψη που λειτουργεί πολύ, αλλά φθείρεται γρήγορα και απαιτεί συχνή αντικατάσταση. Μπορείτε να το χρησιμοποιήσετε, ή μπορείτε να κάνετε μια μεταλλική πλάκα πάνω του.
Στη συνέχεια, πάρτε το πλαστικό τμήμα του καλωδίου οδηγού και τοποθετήστε τα τέσσερα περικόχλια M3 στις οπές στην πίσω πλευρά του. Τώρα βιδώστε την πλάκα κάμψης με τους κοχλίες M3x20. Τοποθετήστε τον οδηγό σύρματος μπροστά από το πλαίσιο κινητήρα του μηχανισμού τροφοδοσίας και ασφαλίστε τον με τον κινητήρα με τέσσερις βίδες M3x12. Ρυθμίστε τη θέση της πλάκας κάμψης. Θα πρέπει να βρίσκεται ακριβώς στο κέντρο της κεφαλής κάμψης.
Το πιάτο είναι έτοιμο. Εάν έχετε ένα ευθύ σύρμα, μπορείτε να χρησιμοποιήσετε το καλώδιο τώρα. Διαφορετικά, χρειάζεστε έναν ανορθωτή.





Βήμα πέμπτο: Κούρσα
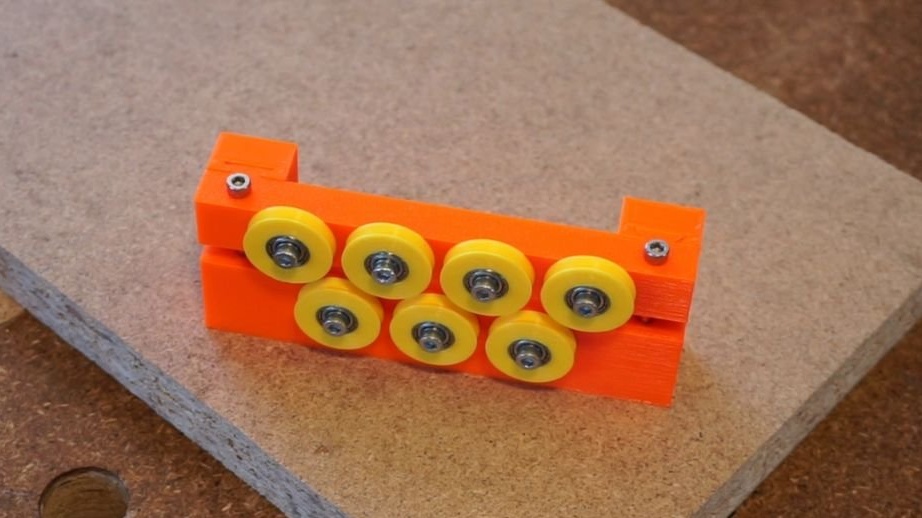
Το σύρμα συνήθως παρέχεται σε μορφή πηνίου. Για να λυγίσετε το καλώδιο, πρέπει πρώτα να το ισιώσετε. Ο ανορθωτής αποτελείται από 7 κυλίνδρους (4 στην κορυφή και 3 στο κάτω μέρος), οι οποίοι μπορούν να πατηθούν μεταξύ τους για να εξασφαλίσουν τη σωστή τάνυση του σύρματος. Αποτρέπει επίσης τη συστροφή του σύρματος κατά την κάμψη.
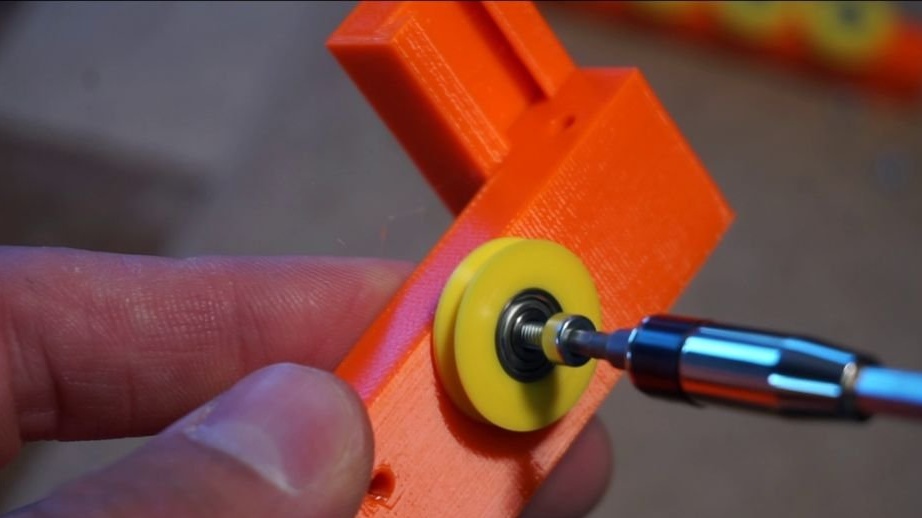
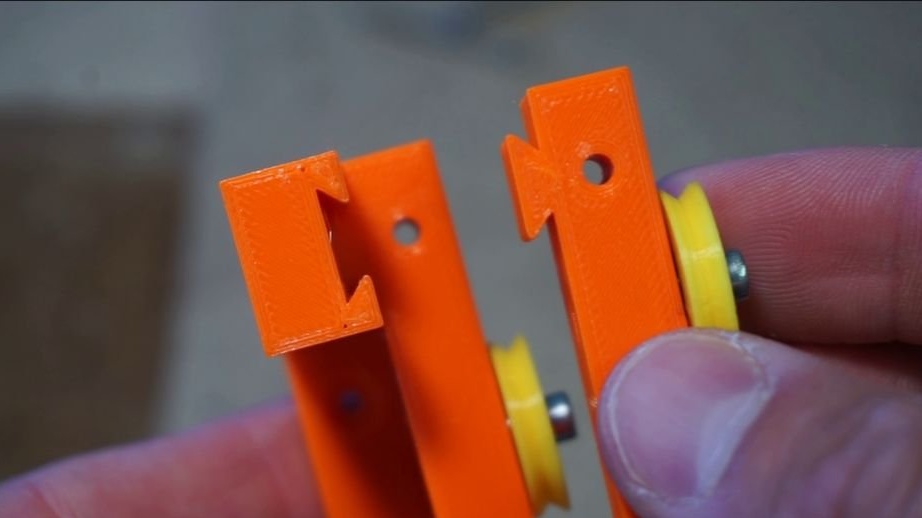
Ξεκινήστε τη συναρμολόγηση με τους κυλίνδρους. Πρώτα πρέπει να πιέσετε το ρουλεμάν 3x10x4 mm στο περίβλημα πλαστικού κυλίνδρου. Τοποθετήστε το μπουλόνι M3x12 στη μία πλευρά και το ροδέλα M3 στην άλλη πλευρά του κυλίνδρου. Η ροδέλα θα αποτρέψει την τριβή του τροχού στο πλαίσιο. Βιδώστε όλους τους κυλίνδρους στο κάτω και το πάνω πλαίσιο. Συνδέστε και τα δύο πλαίσια. Ασφαλίστε τα πλαίσια με δύο μπουλόνια M3x40.
Μπορείτε να εξοικονομήσετε χρήματα σε ρουλεμάν. Εκτυπώστε το μέρος Straightener_RollerNoBearing αντί του Straightener_Roller. Αλλά η απόδοση θα είναι λίγο χειρότερη.
Για ακόμη καλύτερα αποτελέσματα, χρησιμοποιήστε 2 ίσιωμα στη σειρά.




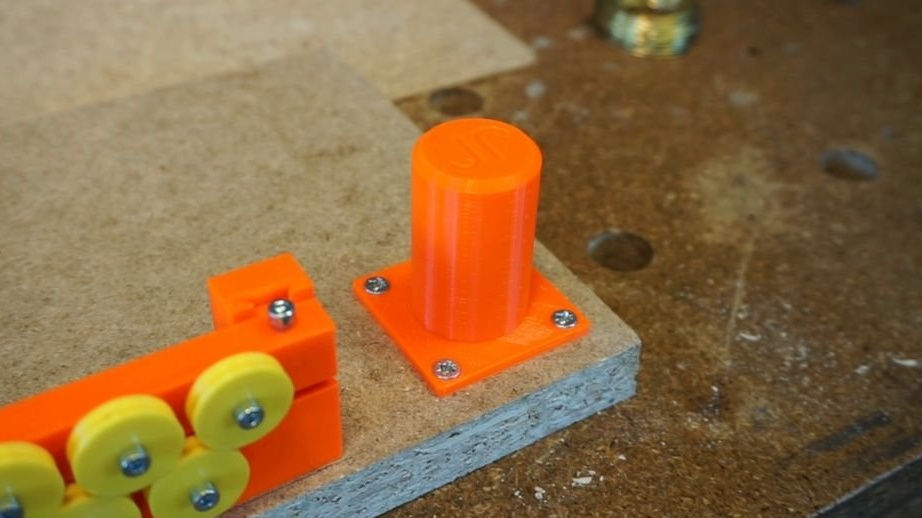
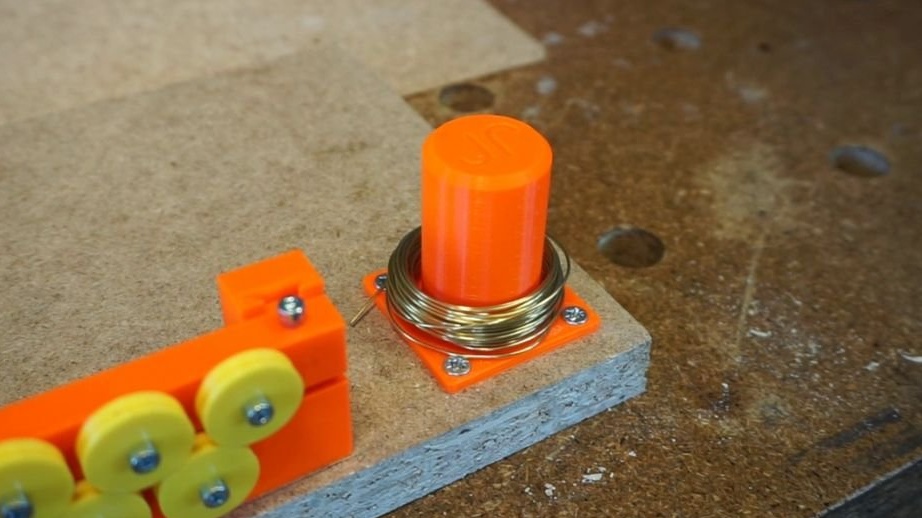
Βήμα έξι: Κάτοχος πηνίου
Ο υποδοχέας καρουλιού είναι ένας απλός κύλινδρος που συγκρατεί το σύρμα και του επιτρέπει να ξετυλίγει από το καρούλι. Βιδώστε το στη βάση με τέσσερις βίδες 3x16.
Βήμα επτά: σύνδεση
Κατ 'αρχάς, το σύρμα κάμψης πρέπει να τροφοδοτείται στο μηχάνημα. Ο πλοίαρχος χρησιμοποιεί συρματόσχοινο ορείχαλκου 0,8-1mm σε σχήμα πηνίου.
Το σύρμα περνά από το πηνίο μέσω των κυλίνδρων. Απλά κολλήστε το σύρμα μεταξύ των κυλίνδρων. Στη συνέχεια περνάει από το κούμπωμα.Ρυθμίστε τη θέση του μηχανισμού τροφοδοσίας έτσι ώστε η υδρορροή να είναι επίπεδη με την επιφάνεια του οδηγού σύρματος. Πατήστε το μοχλό στην ενδιάμεση ταχύτητα και σπρώξτε το καλώδιο μέσω του τροφοδότη στην πλάκα κάμψης. Αφήστε το μοχλό και αφήστε το να πιέσει προς το μηχανισμό τροφοδοσίας. Τώρα μπορείτε να μετακινηθείτε χειροκίνητα στο μηχανισμό τροφοδοσίας για να σπρώξετε το καλώδιο στην κεφαλή κάμψης. Προσαρμόστε προσεκτικά την τάση στους κυλίνδρους σφίγγοντας τους κοχλίες. Οι κύλινδροι δεν πρέπει να περιστρέφονται ελεύθερα, αλλά το σύρμα θα πρέπει να κινείται ομαλά.
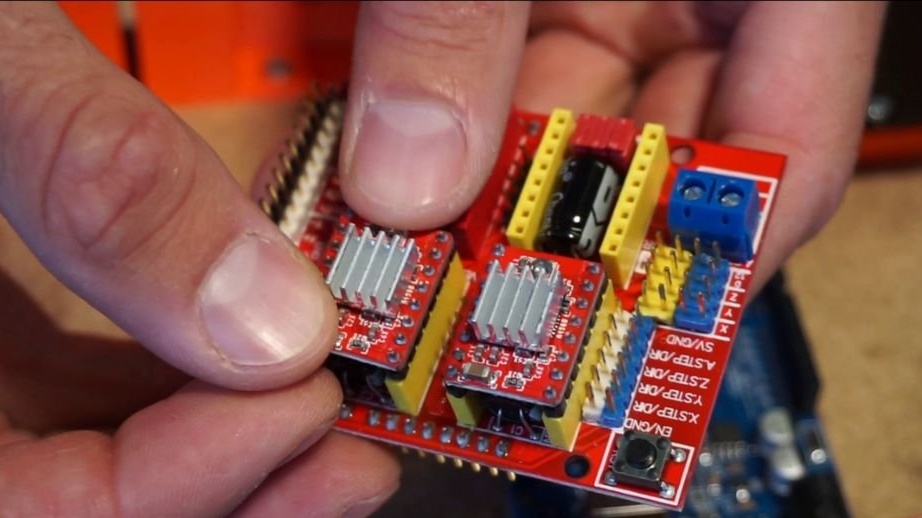
Δεύτερον ηλεκτρονικά Ο ελεγκτής πρέπει επίσης να συνδεθεί. Ο πλοίαρχος χρησιμοποιεί το κλασσικό Arduino UNO με CNC και δύο οδηγούς Stepper A4988. Ο κινητήρας τροφοδοσίας είναι συνδεδεμένος στον άξονα Ζ και ο κινητήρας κεφαλής κάμψης στον άξονα Χ. Οι οδηγοί έχουν διαμορφωθεί για την υψηλότερη δυνατή ακρίβεια και έχουν εισαχθεί και οι 3 άλτες κάτω από τους οδηγούς βημάτων. Όλα πρέπει να συνδεθούν με τροφοδοτικό ισχύος 3Α 12V.

Βήμα Οκτώ: Προσαρμοσμένο λογισμικό
Τώρα μπορείτε να δοκιμάσετε να ξεκινήσετε το μηχάνημα. Master χρησιμοποιεί GRBL μαζί με cncjs. Έχουν σχεδιαστεί για να λειτουργούν σε μια μηχανή φρεζαρίσματος, αλλά λειτουργούν εξαιρετικά για κάθε τύπο CNC. Το GRBL είναι το υλικολογισμικό που πρέπει να εγκαταστήσετε στο Arduino UNO. Υπάρχει ένας καλός πελάτης web cncjs για τον καθορισμό παραμέτρων. Εγκαταστήστε το GRBL σε Arduino και cncjs στον υπολογιστή σας.
Μετά την εγκατάσταση, πρέπει να συνδεθείτε στο μηχάνημα και να ελέγξετε τη λειτουργία του πιέζοντας τα πλήκτρα Z +/- ή X +/-.
Τώρα πρέπει να βαθμονομήσετε: 10 mm = Z10 $ 102 = 34 $ 110 = 1600 $ 111 = 600 $ 112 = 1000 $ 120 = 500 $ 121 = 350 $ 122 = 350
Πρόκειται για ένα σύνολο τιμών που καθορίζουν τον τρόπο μετατροπής του αριθμού που αναγράφεται στον κώδικα στην κίνηση του κινητήρα. Για παράδειγμα, εάν ορίσετε τον άξονα Z σε 30, αυτό στην πραγματικότητα σημαίνει ότι θα προωθήσει 30 mm σύρμα μέσω του τροφοδότη.
Βρήκαμε τη βαθμονόμηση, τώρα πρέπει να ρυθμίσετε την κεφαλή κάμψης στη μηδενική θέση.
Η κίνηση της κεφαλής κάμψης καθορίζεται από τη γνωστή σταθερή θέση της κεφαλής κάμψης. Σε αυτή την περίπτωση, αυτή είναι η θέση στην οποία ο πείρος κάμψης στο κεφάλι είναι στραμμένος προς τα αριστερά. Δείτε τη φωτογραφία.
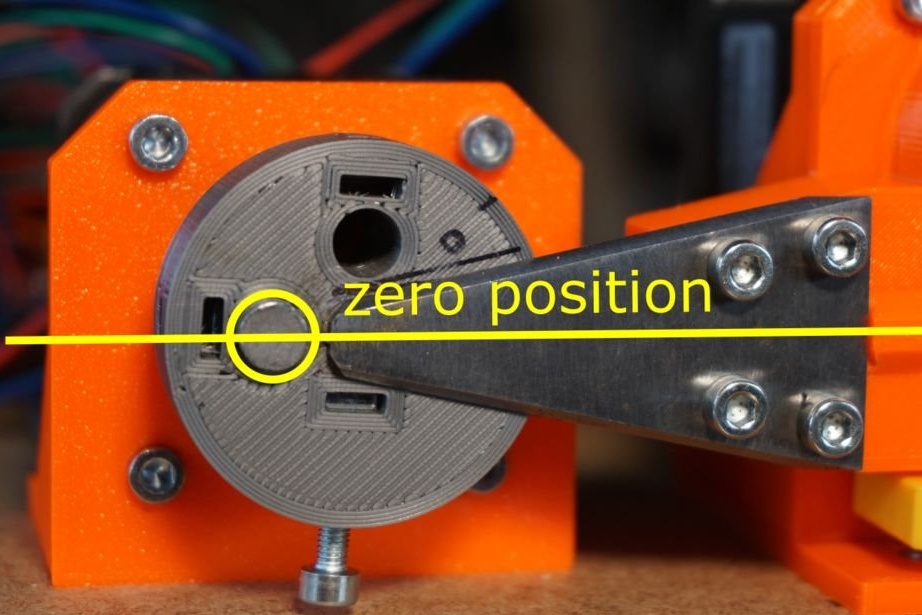
Συνιστάται να σημειώσετε αυτή τη μηδενική θέση στο κεφάλι για να μπορέσετε να την επιστρέψετε στην ίδια θέση. Δεν είναι απαραίτητο ο μηχανισμός τροφοδοσίας να καθορίσει τη μηδενική θέση, επειδή κινείται πάντα σε σχέση με την τρέχουσα θέση.
Τώρα ας δούμε ένα παράδειγμα Gcode. Μοιάζει με αυτό:
G91
G1 Z1
G90
G1 Χ2
G1 Χ-6Και εδώ είναι αυτό που κάθε αξία είναι γραμμένο για:
G91 - χρησιμοποιήστε σχετικές συντεταγμένες (απαιτείται πριν από οποιαδήποτε κίνηση κατά μήκος του άξονα Z)
G1 Z1 - τροφοδοσία καλωδίου 1 mm
G90 - χρήση απόλυτων συντεταγμένων (απαιτείται πριν από οποιαδήποτε κίνηση κατά μήκος του άξονα Χ)
G1 X2 - γυρίστε την κεφαλή κάμψης στη θέση 2 (αυτός ο αριθμός δεν διαθέτει μονάδες)
G1 X-6 - γυρίστε την κεφαλή κάμψης στη θέση -6
Εάν επαναλάβετε τα βήματα 100 φορές, θα πάρετε έναν κώδικα κάμψης άνοιξη. Περισσότερα αρχεία προέλευσης μπορείτε να βρείτε παρακάτω.
hex-inner.gcode
hex-exterior.gcode
spring.gcode
Το μηχάνημα είναι έτοιμο. Αλλά ο πλοίαρχος θα συνεχίσει να εργάζεται για τη βελτίωση του.
Η όλη διαδικασία κατασκευής μιας τέτοιας μηχανής μπορεί να δει στο βίντεο.