

Το ρομπότ DIY θα είναι ένα μεγάλο παιχνίδι για τα παιδιά, επίσης με αυτό μπορείτε να παίξετε συγγενείς ή φίλους. Η ουσία του ρομπότ είναι η εξής. Είναι ένα κουτί με διακόπτη. Μόλις κάποιος κάνει κλικ στον διακόπτη στο κιβώτιο, ανοίγει μια πόρτα, από την οποία βγαίνει το χέρι και βάζει τον διακόπτη πίσω στην αρχική του κατάσταση. Παρά την εξωτερική απλότητα του ρομπότ, στην πραγματικότητα, όλα αυτά φαίνονται αρκετά αστεία.
Η βάση για τη δημιουργία ενός ρομπότ είναι ένα κύκλωμα Arduino. Υπάρχουν επίσης μερικά μηχανικά στοιχεία που θα συζητηθούν παρακάτω. Ας εξετάσουμε με περισσότερες λεπτομέρειες πώς μπορούμε το κάνετε μόνοι σας συναρμολογήστε ένα τέτοιο ρομπότ.
Υλικά και εργαλεία για την κατασκευή:
- Πίνακας Arduino, οποιοδήποτε με εξόδους PWM θα κάνει?
- σερβοκινητήρες, δύο τεμάχια (κατάλληλα το μοντέλο Futaba - S3003, η ισχύς ενός τέτοιου κινητήρα είναι αρκετή για να ανοίξει η πόρτα, η συσκευή παράγει μέχρι 3,2 kg / cm δύναμη)?
- μπαταρίες.
- Τύπος διακόπτη SPST ή SPTT.
- διακόπτης για τον έλεγχο της ισχύος της μπαταρίας.
- χρειάζεστε ένα κουμπί για να κάνετε επανεκκίνηση του Arduino.
- καλώδια, βραχυκυκλωτήρες και άλλα μικρά πράγματα.

Επιπλέον, θα χρειαστείτε επιπλέον ένα κιβώτιο ταχυτήτων (κατάλληλο για ραδιοελεγχόμενα αυτοκίνητα), ένα ηλεκτρικό μοτέρ που ονομάζεται κινητήρας ασπίδα Arduino, ένας σερβοκινητήρας RC. Αυτά τα στοιχεία είναι απαραίτητα προκειμένου να γίνει το κιβώτιο να κινείται, όπως ο συγγραφέας.
Για να μειωθεί το επίπεδο θορύβου κατά τη λειτουργία της συσκευής, απαιτείται πυκνωτής ηλεκτρολυτικού τύπου με ονομαστική τιμή 10mF, αντίσταση 10K και μετατροπέα 74HC04.
Η διαδικασία κατασκευής του ρομπότ:
Πρώτο βήμα. Πώς να φτιάξετε ένα κουτί
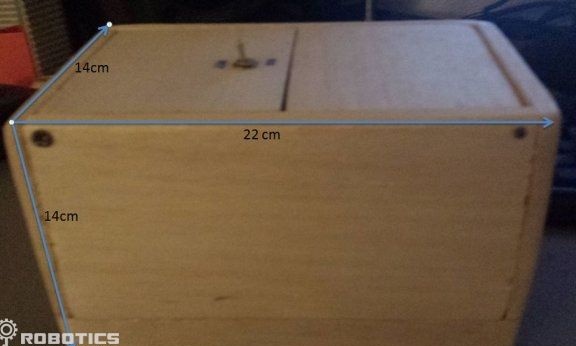
Για να δημιουργήσετε ένα κουτί, δηλαδή ένα σώμα ρομπότ, πρέπει να βρείτε κόντρα πλακέ ή φελλό. Επιπλέον, χρειάζεστε μια ισχυρή κόλλα για τη συγκόλληση ξύλου. Είναι σημαντικό να καταλάβουμε ότι όσο περισσότερο ζυγίζει η δομή, τόσο περισσότερη ενέργεια καταναλώνεται. Όσον αφορά το μέγεθος του κουτιού, είναι 22cm x 14cm x 14cm.
Βήμα δεύτερο Σχηματικό διάγραμμα ε εξαρτήματα
Η κορυφή του ρομπότ περιλαμβάνει έναν κεντρικό πίνακα Arduino, δύο σερβομηχανισμούς και έναν διακόπτη. Όσο για το κύκλωμα, το οποίο είναι υπεύθυνο για την ποσότητα του θορύβου, μπορεί να αντικατασταθεί με μια συνηθισμένη αντίσταση.
Οι σερβομηχανισμοί τροφοδοτούνται μέσω του πέμπτου πείρου του πίνακα Arduino. Όσον αφορά τα καλώδια σήματος, συνδέονται με τις επαφές 9 και 10. Χάρη σε αυτές τις επαφές PWM, ελέγχεται η γωνία περιστροφής των σερβοκινητήρων. Αυτή είναι μια γωνία από 0 έως 180 μοίρες.
Το κόκκινο κουμπί είναι απαραίτητο για την επανεκκίνηση του Arduino.
Στο κάτω μέρος του κυκλώματος βρίσκεται ο πίνακας προστασίας του κινητήρα Arduino.Στον πίνακα μπορείτε να δείτε δύο κανάλια, A και B, χάρη σε αυτά, αν θέλετε, μπορείτε να συνδέσετε δύο κινητήρες ταυτόχρονα. Το κύριο καθήκον αυτού του πίνακα είναι ότι με αυτό μπορείτε να ρυθμίσετε προγραμματικά την ταχύτητα περιστροφής, την κατεύθυνση, τα σπασίματα για κάθε κανάλι των κινητήρων. Αν κοιτάξετε το διάγραμμα, τότε χρησιμοποιείται το κανάλι Β, ενώ η επαφή 13 καθορίζει την κατεύθυνση, η επαφή 11 είναι η ταχύτητα και η επαφή 8 χρησιμοποιείται για τον έλεγχο των φρένων.
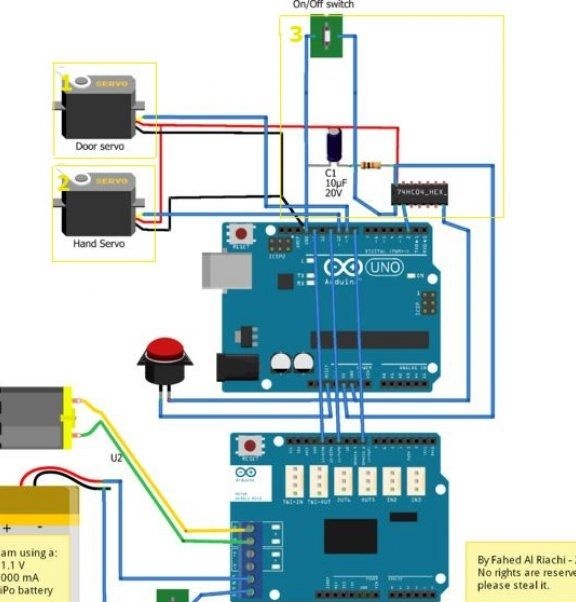
Η πηγή ενέργειας είναι μια μπαταρία 11.1 / 1000 mA, συνδέεται με την πλακέτα προστασίας του κινητήρα Arduino. Αν δεν χρησιμοποιηθεί, τότε η μπαταρία συνδέεται απευθείας με τον κεντρικό πίνακα.
Βήμα τρίτο Εγκατάσταση κινητήρα
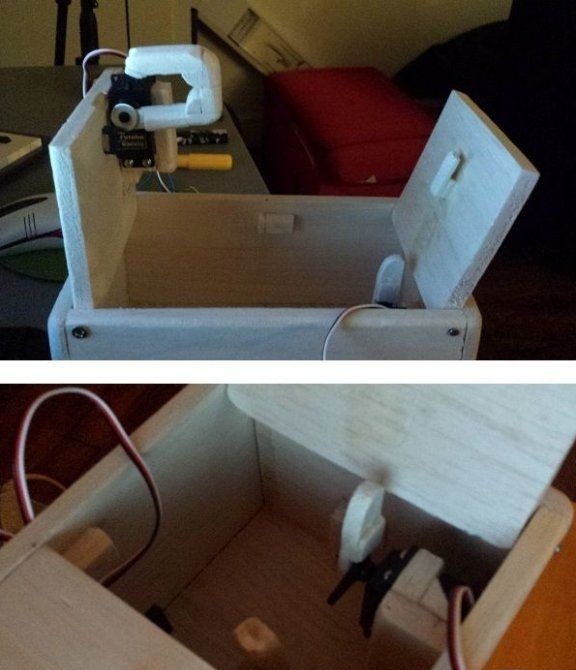
Ο σερβομηχανισμός και τα χέρια εγκαθίστανται πειραματικά, πρέπει να ελέγξετε στην πράξη αν οι μηχανικοί λειτουργούν σωστά. Για να ελέγξετε την ακτίνα απόκλισης των κινητήρων, μπορείτε να χρησιμοποιήσετε το πρόγραμμα Arduino IDE.
Για την κατασκευή των χεριών που παίρνουν ξύλο κάθε είδους. Το κυριότερο είναι ότι είναι ελαφρύ, διότι διαφορετικά θα αυξηθεί η κατανάλωση ενέργειας. Όσον αφορά το μέγεθος του χεριού, ρυθμίζεται κατά την εγκατάσταση, επιλέγοντας το επιθυμητό μήκος, επιτυγχάνεται το επιθυμητό αποτέλεσμα.
Το ωστήριο και το χέρι του καλύμματος είναι τοποθετημένα έτσι ώστε να μην αγγίζουν το σερβοκινητήρα κατά τη λειτουργία.
Βήμα τέσσερα Συνδέουμε το σερβοκινητήρα και αλλάζουμε το Arduino
Χρησιμοποιώντας καλώδια και βραχυκυκλωτήρες, πρέπει να συνδέσετε όλα τα ηλεκτρονικά στοιχεία μεταξύ τους σύμφωνα με το καθορισμένο σχέδιο. Τα καλώδια πρέπει να τοποθετηθούν έτσι ώστε να μην παρεμβαίνουν στα κινούμενα στοιχεία του ρομπότ.
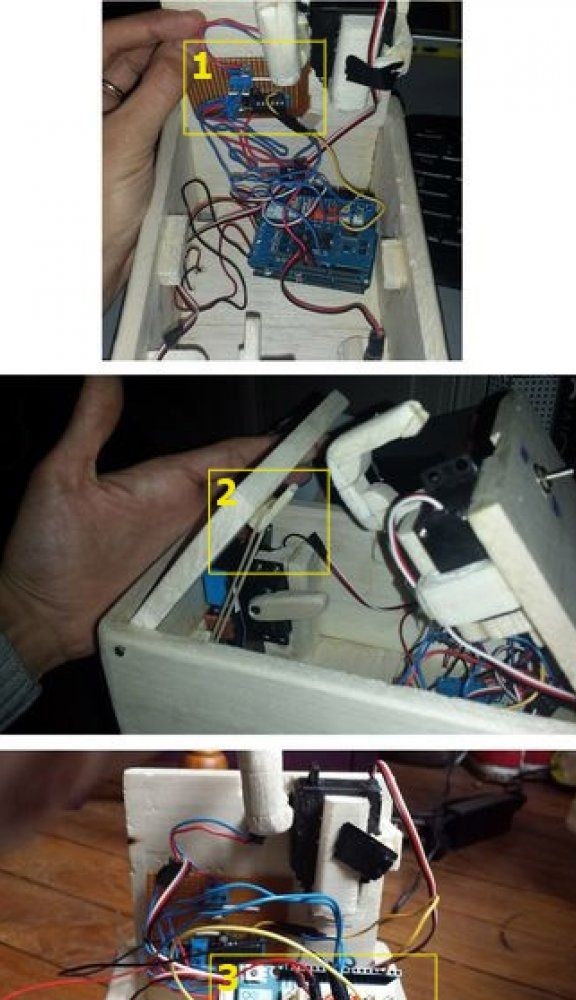
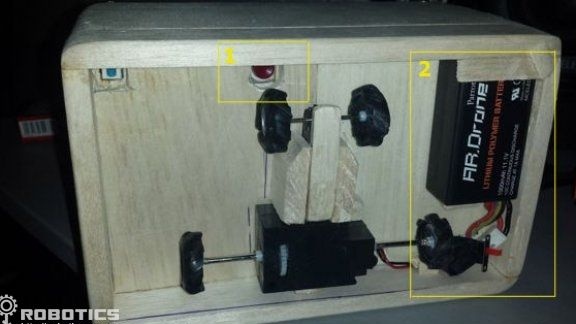
Κάτω από τον αριθμό 1, μπορείτε να δείτε πώς είναι συνδεδεμένο και πού βρίσκεται το κύκλωμα μεταγωγής. Ο αριθμός 2 σηματοδοτεί ένα τέτοιο στοιχείο ως ελαστική ταινία, είναι απαραίτητο για να ανοίξει η πόρτα με κάποια τάση. Λοιπόν, ο αριθμός 3 δείχνει την ασπίδα του κινητήρα που είναι εγκατεστημένη στο Arduino.
Βήμα πέντε Εγκατάσταση του μηχανικού μέρους για τη μετακίνηση του κιβωτίου
Στο κάτω μέρος του κιβωτίου υπάρχει μια μπαταρία, ένας κινητήρας με τροχούς, κιβώτιο ταχυτήτων, ένα κουμπί επαναφοράς και ένας διακόπτης εναλλαγής για τον έλεγχο της ισχύος του ρομπότ. Πριν από την τοποθέτηση των στοιχείων, πρέπει να υπολογίσετε την ισορροπία του βάρους του κουτιού. Προκειμένου το ρομπότ να είναι σταθερό, εκτός από τον οδηγό άξονα, έχει εγκατασταθεί και μία άλλη.
Βήμα έξι Ένα άλλο πρόσθετο χαρακτηριστικό
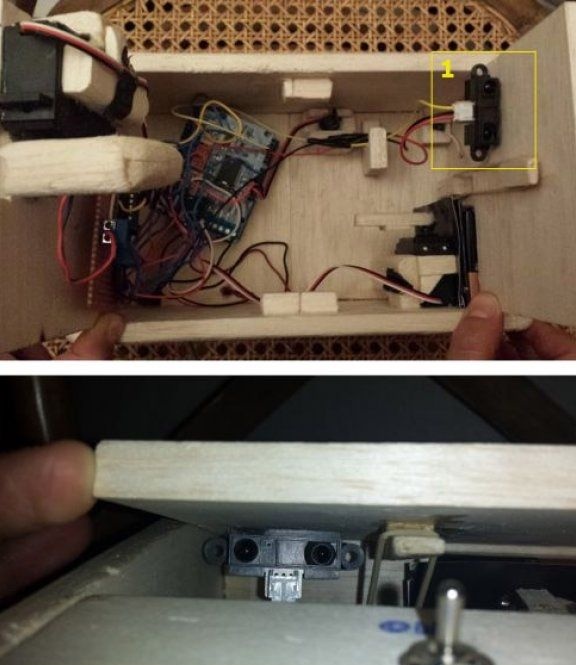
Προκειμένου το ρομπότ να καθορίσει την κατεύθυνση της κίνησης, μπορεί να εξοπλιστεί με έναν αισθητήρα IR. Ταυτόχρονα, όταν κάποιος προσπαθεί να αγγίξει τον διακόπτη εναλλαγής, το κιβώτιο θα μετακινηθεί δεξιά και αριστερά. Για τους σκοπούς αυτούς, ο αισθητήρας GP2Y0A21 είναι κατάλληλος, έχει τρία καλώδια. Το κίτρινο πρέπει να συνδεθεί με τον τρίτο πείρο του Arduino, κόκκινο με τον ακροδέκτη 5 και μαύρο με τη γη.
Αυτό είναι όλο, ένα απλό και ταυτόχρονα αστείο ρομπότ είναι έτοιμο. Ένα τέτοιο παιχνίδι θα φέρει χαρά όχι μόνο στο παιδί, αλλά θα εκπλήσσει και πολλούς ενήλικες.
Firmware: