
Υλικά και εργαλεία:
- μικροελεγκτή Arduino (σε αυτό το σπιτικό ισχύει το Arduino Uno Rev 3).
- Δύο σερβοί από το Parallax.
- joystick (επίσης από το Parallax).
- πλακέτα κυκλώματος) μικρό).
- συνδέσεις για σύνδεση.
- Μια συσκευή για την παρακολούθηση της κίνησης των σερβοκινητήρων (χρησιμοποιήθηκαν σπασμένες κάμερες webcam και lego).
Σπιτική διαδικασία συναρμολόγησης:
Πρώτο βήμα. Συνδέουμε σερβοκινητήρες
Η διαδικασία σπιτικής συναρμολόγησης αρχίζει με τη σύνδεση των σερβοκινητήρων. Για να συναρμολογηθεί μια προκαταρκτική διάταξη, χρησιμοποιείται ένας πίνακας κυκλωμάτων. Στη συνέχεια, θα είναι δυνατή η δημιουργία ξεχωριστής ασπίδας. Στο σχήμα μπορείτε να δείτε πώς ακριβώς συνδέονται τα πάντα.
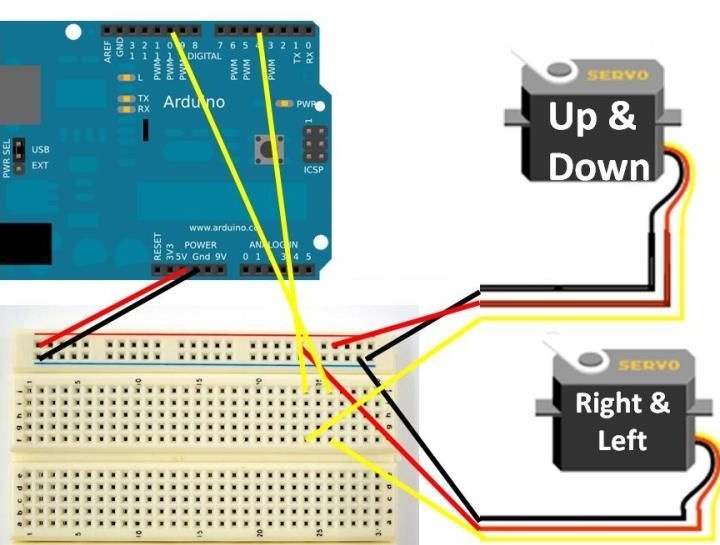
Το κόκκινο καλώδιο είναι η τροφοδοσία, συνδέεται με τον ακροδέκτη 5V του ελεγκτή Arduino.
Το μαύρο καλώδιο είναι μείον (γείωση), συνδέεται με την έξοδο Arduino που ονομάζεται GND.
Το κίτρινο καλώδιο από το δεξί και αριστερό σερβοκινητήρα πρέπει να συνδεθεί στον ακροδέκτη 11. Σε ορισμένα μοντέλα μπορεί να είναι λευκό.
Ένα παρόμοιο κίτρινο καλώδιο Up & Down πρέπει να συνδεθεί στον ακροδέκτη 4. Μπορεί επίσης να είναι λευκό σε ορισμένα μοντέλα κινητήρων.
Είναι σημαντικό να θυμάστε ότι οι υποδοχές σήματος που χρησιμοποιούνται για τον έλεγχο του κινητήρα προέρχονται από τις εξόδους PWM.
Βήμα δεύτερο Συνδέστε το χειριστήριο
Ο τρόπος με τον οποίο είναι συνδεδεμένο το joystick μπορεί να δει στην εικόνα. Αρχικά, το σχέδιο μπορεί να φαίνεται μάλλον περίπλοκο, αλλά στην πραγματικότητα δεν υπάρχει τίποτα περίπλοκο εδώ. Όπως και με τους κινητήρες, χρησιμοποιείται εδώ μια πλακέτα καλωδίων.
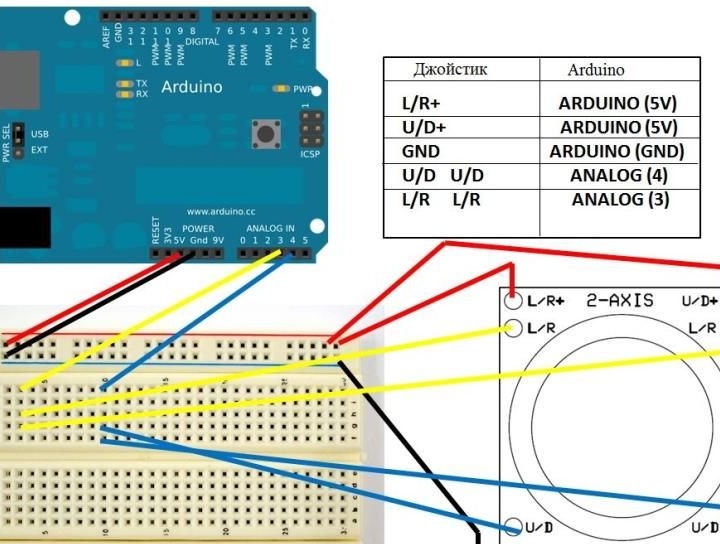
1. Στη μονάδα χειριστηρίου μπορείτε να βρείτε τις εξόδους U / R + και L / R +. Μέσω αυτών των εξόδων συνδέεται η παροχή ρεύματος. Συνεπώς, πρέπει να εφαρμόσετε τάση + 5V από την αντίστοιχη καρφίτσα στο Arduino.
2. Υπάρχουν επίσης δύο υποδοχές κάτω από το joystick που ονομάζεται L / R και δύο U / D συνδέσεις. Πρέπει να συνδεθούν με τις αναλογικές εξόδους A3 και A4.
3. Λοιπόν, τελικά, η γη στο χειριστήριο πρέπει να συνδεθεί με τη γη στο Arduino.
Μετά τη συναρμολόγηση, η σύνδεση πρέπει να ελέγχεται διπλά. Λόγω των σφαλμάτων σύνδεσης, στις περισσότερες περιπτώσεις προκύπτουν προβλήματα. Αυτό ισχύει ιδιαίτερα όταν χρησιμοποιείται πίνακας κυκλωμάτων και υπάρχουν πολλές συνδέσεις πάνω σε αυτό.
Βήμα τρίτοΣκίτσο για το Arduino
Ο κώδικας είναι πολύ απλός και περιέχει λεπτομερή σχόλια. Ο παραπάνω κώδικας πρέπει απλώς να αντιγραφεί στο ID του Arduino. Μόλις φορτωθεί ο κώδικας, οι κινητήρες δεν πρέπει να κινηθούν. Θα πρέπει να αρχίσουν να κινούνται μόνο όταν πατηθεί το κουμπί στο joystick.
Προβλήματα που μπορεί να προκύψουν και πώς να τα λύσουν
1. Εάν οι μηχανές δεν ενεργοποιηθούν, ελέγξτε ξανά τη σύνδεση. Οι έξοδοι PWM χρησιμοποιούνται για τη σύνδεση κινητήρων και οι αναλογικές εξόδους χρησιμοποιούνται για τη σύνδεση των χειριστηρίων.
2. Συμβαίνει ότι αμέσως μετά τη φόρτωση του κώδικα, οι κινητήρες αρχίζουν να δονείται. Αυτό συμβαίνει αν συνδέσετε εσφαλμένα τις ακίδες U / D + L / R +. Η σύνδεση πρέπει να ελεγχθεί προσεκτικά. Για να μην καεί ο πίνακας κατά τη διάρκεια της δοκιμής, πρέπει να αποσυνδεθεί από τον υπολογιστή.
3. Εάν όλα επανελέγχονται, αλλά οι μηχανές εξακολουθούν να μην θέλουν να λειτουργήσουν, μπορείτε να δοκιμάσετε να επανασυνδέσετε το joystick. Πρέπει να αφαιρεθεί από την πλακέτα κυκλώματος και στη συνέχεια να εγκατασταθεί με κάποια προσπάθεια. Οι υποδοχές του joystick θα πρέπει να μπαίνουν καλά στη διάταξη.
Εάν όλα έχουν τελειώσει, τώρα μπορείτε να ξεκινήσετε να δημιουργείτε οποιαδήποτε εγχώρια αντικείμενα με έλεγχο μέσω του χειριστηρίου. Για παράδειγμα, μπορείτε να δημιουργήσετε ένα ρομπότ που μπορεί να ελεγχθεί με ένα joystick και πολλά άλλα.