Κατά τη διάρκεια της εκπαίδευσής του, ο συγγραφέας έπαιξε παιχνίδια με υποστήριξη επιταχυνσιόμετρο στο τηλέφωνό του. Μου άρεσε πολύ η οδήγηση ενός αυτοκινήτου στο τηλέφωνο απλά με κλίση, και στη συνέχεια άρχισε να ονειρεύεται να κάνει ένα αυτοκίνητο με τον ίδιο έλεγχο στην πραγματική ζωή. Τώρα έχοντας Arduino και έχοντας αποκτήσει δεξιότητες προγραμματισμού, ήρθε η ώρα να δημιουργήσουμε μια διαχειριζόμενη μηχανή στο Android, την ονόμασε Hercules.
Πήρε αυτό το όνομα λόγω της τεράστιας ροπής και της υψηλής ταχύτητας. Μοντέλο μπορεί να ελεγχθεί χρησιμοποιώντας ένα τηλέφωνο Android μέσω Bluetooth. Οποιοδήποτε τηλέφωνο με αυτό το λειτουργικό σύστημα είναι κατάλληλο για έλεγχο, ο συγγραφέας δεν περιορίζει ένα τηλεχειριστήριο. Επίσης, χρησιμοποιώντας το τηλέφωνο έσωσε χρήματα, επειδή δεν έπρεπε να ξοδεύω χρήματα για τη δημιουργία τηλεχειριστηρίου.
Υλικά και εργαλεία:
- Arduino Uno
- πομποδέκτη Bluetooth
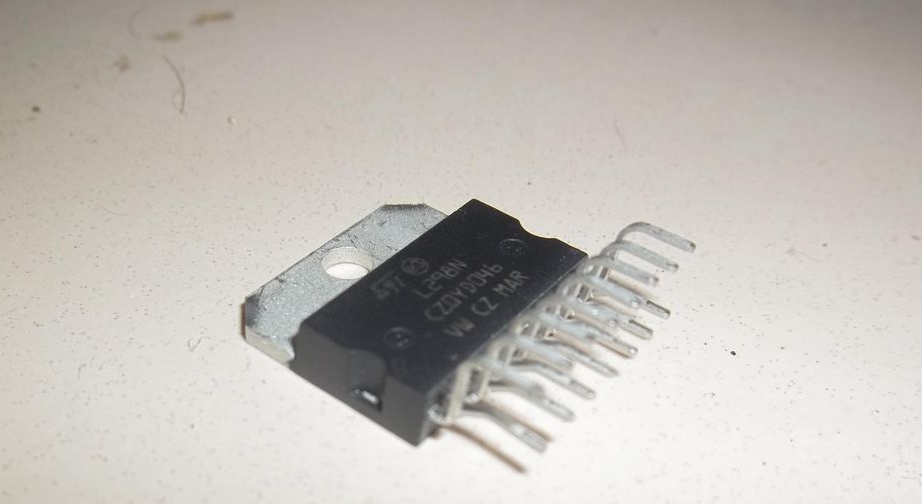
- Έλεγχος διπλού κινητήρα (με γέφυρα L298 H)
- Κινητήρες με γρανάζια 4 τεμ. (Η ισχύς επιλέγεται ανάλογα με την εφαρμογή του μηχανήματος)
- Τροχοί 4 τεμ
- Μπαταρία 1Αh SLA 12V
- Βάση για εξαρτήματα (πλαίσιο)
- breadboard
- Κουτιά για στέγαση 4 τεμ
- Διακόπτης SPST
- Σύνδεση καλωδίων για το Arduino
- Καλώδια συγκόλλησης
- Παξιμάδια και βίδες μικρού μεγέθους
- Αντίσταση 10 kOhm 1 τεμ
- Αντίσταση 20 kOhm 1 τεμ
- τηλέφωνο Android
- συγκολλητικό σίδερο
- συγκόλληση
- πάστα συγκόλλησης
- τρυπάνι





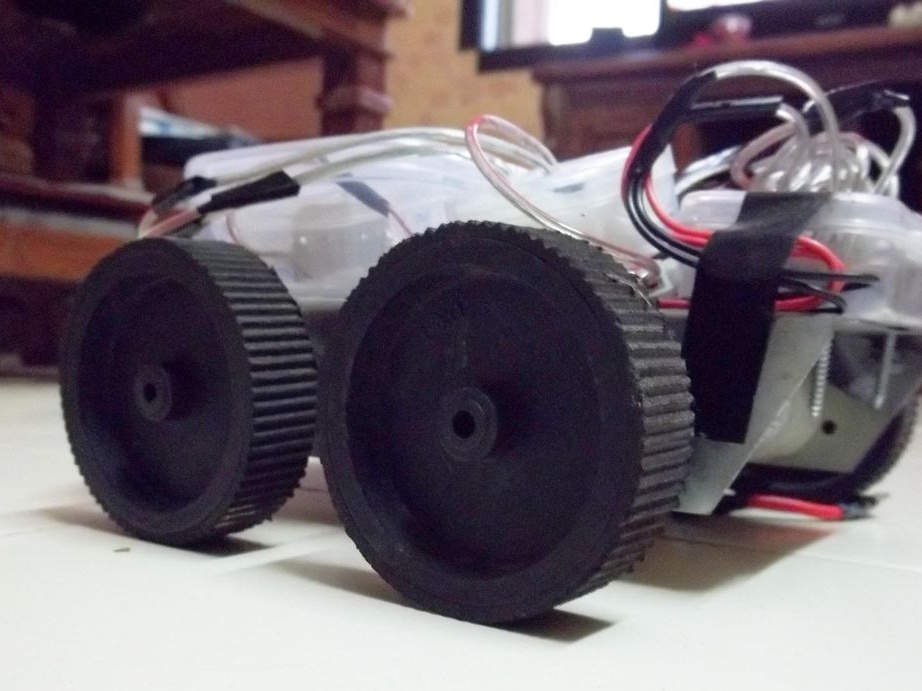
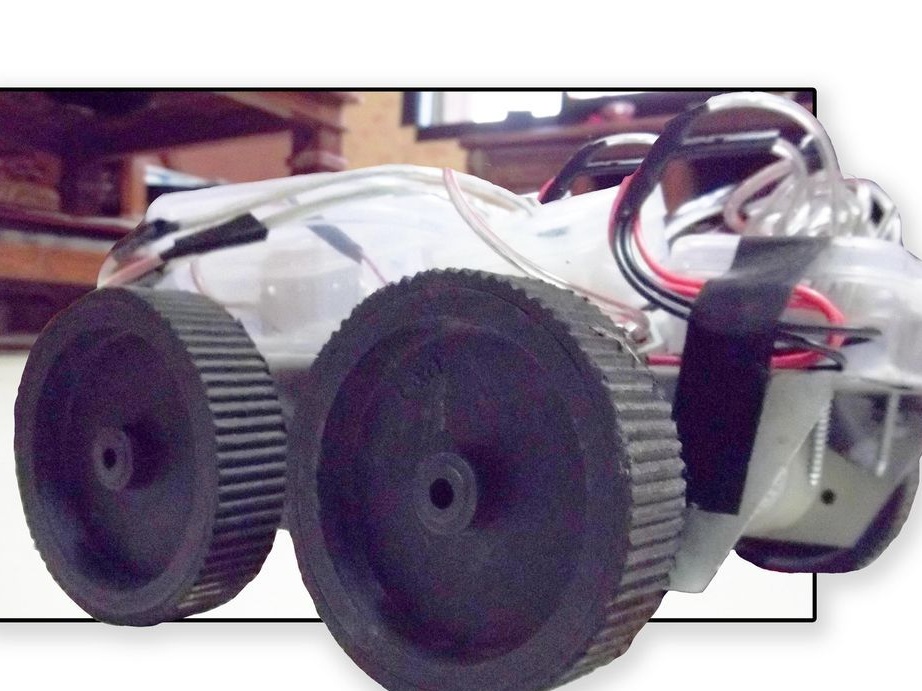
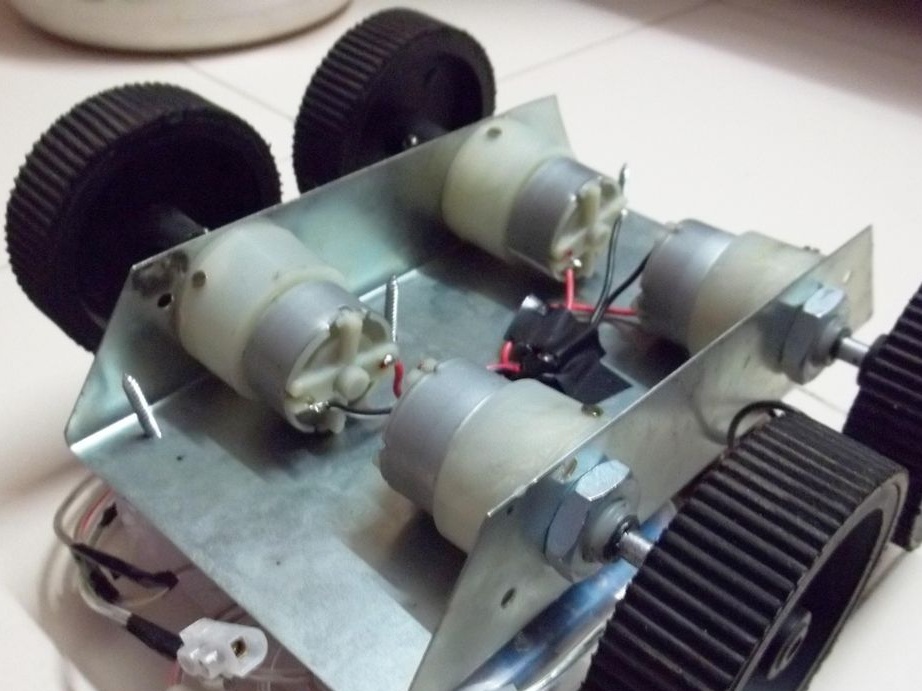
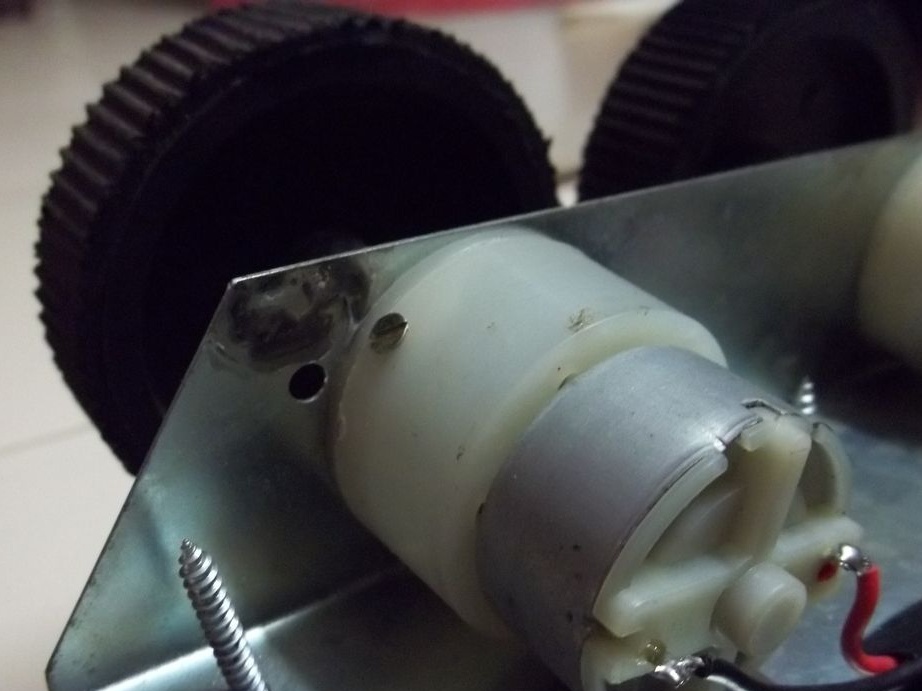
Πρώτο βήμα. Τροχοί και σασί.
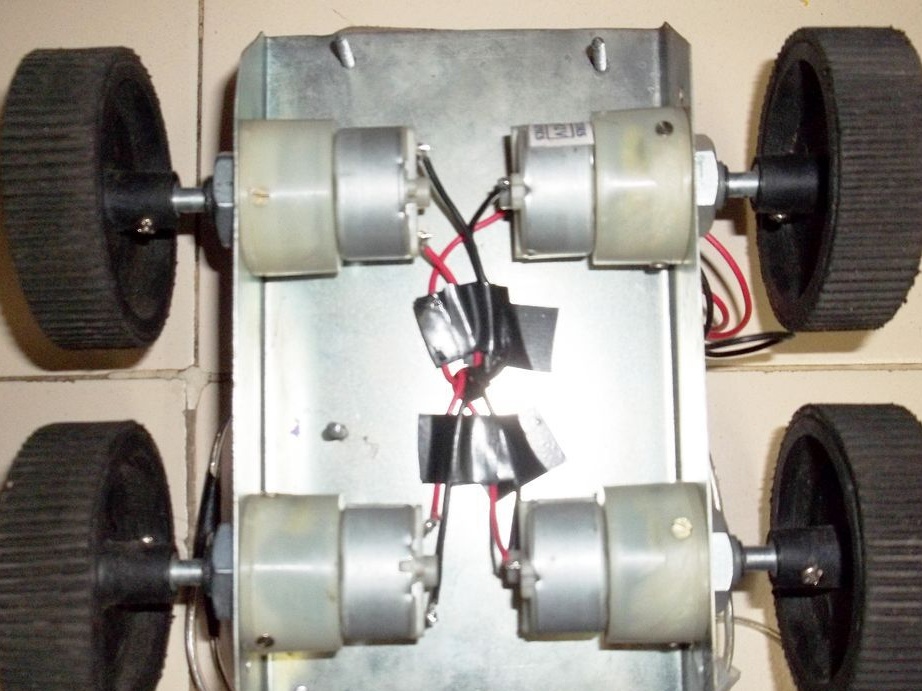
Οι βίδες του κινητήρα διευκόλυναν την τοποθέτηση τους στο πλαίσιο με παξιμάδια. Οι τροχοί τοποθετούνται μέχρι τον άξονα του κινητήρα. Δύο δεξιά μοτέρ ενεργοποιούνται παράλληλα μεταξύ τους, καθώς και δύο αριστερά. Τι φαίνεται το πλαίσιο μετά την εγκατάσταση τεσσάρων τροχών και κινητήρων μπορείτε να δείτε στην παρακάτω φωτογραφία.
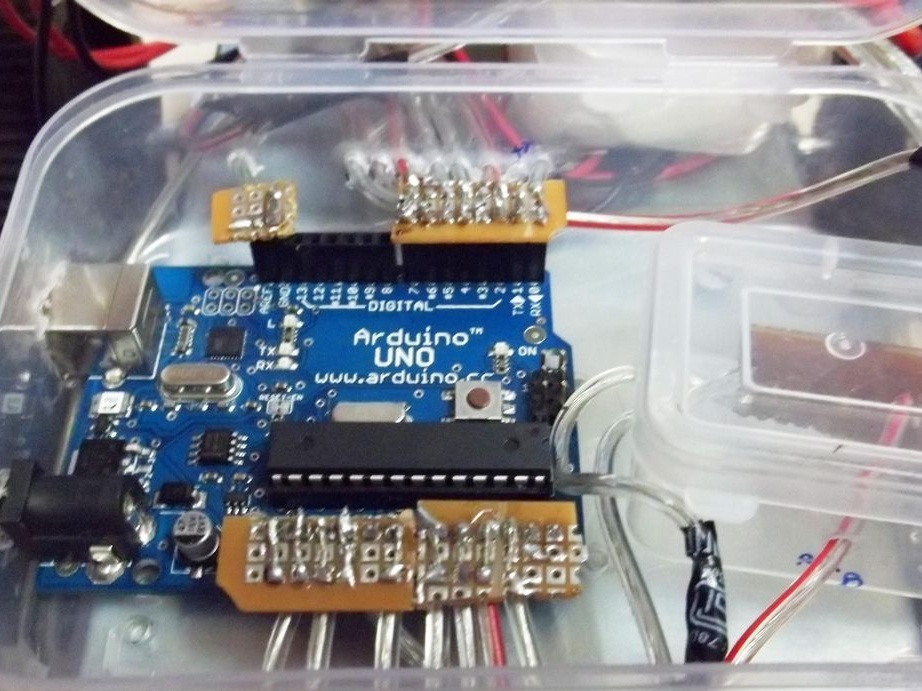
Βήμα δεύτερο Στέγαση για Arduino.
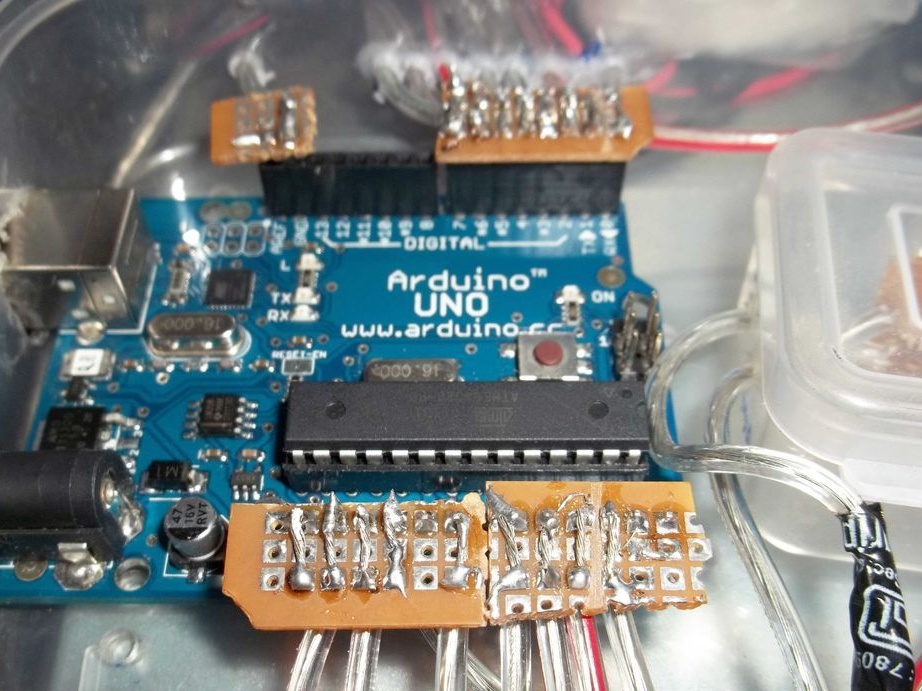
Το διάγραμμα για το Arduino διαιρείται σε διάφορα μέρη. Μια τέτοια αρθρωτή λύση σχεδιασμού θα βοηθήσει στο μέλλον να υποστηρίξει το κύκλωμα ή να εξαλείψει πιθανή δυσλειτουργία. Εάν ένα από τα συστατικά σπάσει ή καεί έξω, τότε μπορεί να αντικατασταθεί γρήγορα, και χωρίς να σπάσει το σχέδιο. Το κουτί για το Arduino δημιουργήθηκε ως εξής:
- Τέσσερα μέρη κόπηκαν από το breadboard, δύο από αυτά με τρύπες μεγέθους 8x3, τα δε δεύτερα μέρη 6x3.
- Οι καρφίτσες BLS συγκολλήθηκαν σε κάθε πλακέτα στη μεγάλη πλευρά.
- Κάθε πινέλο στο πιρούνι ήταν επιπλέον κολλημένο με σύρματα μήκους περίπου 10 εκ. Αυτό έγινε έτσι ώστε τα καλώδια να μην βγουν από το Arduino, επειδή τώρα το φορτίο άρχισε να κατανέμεται ομοιόμορφα.
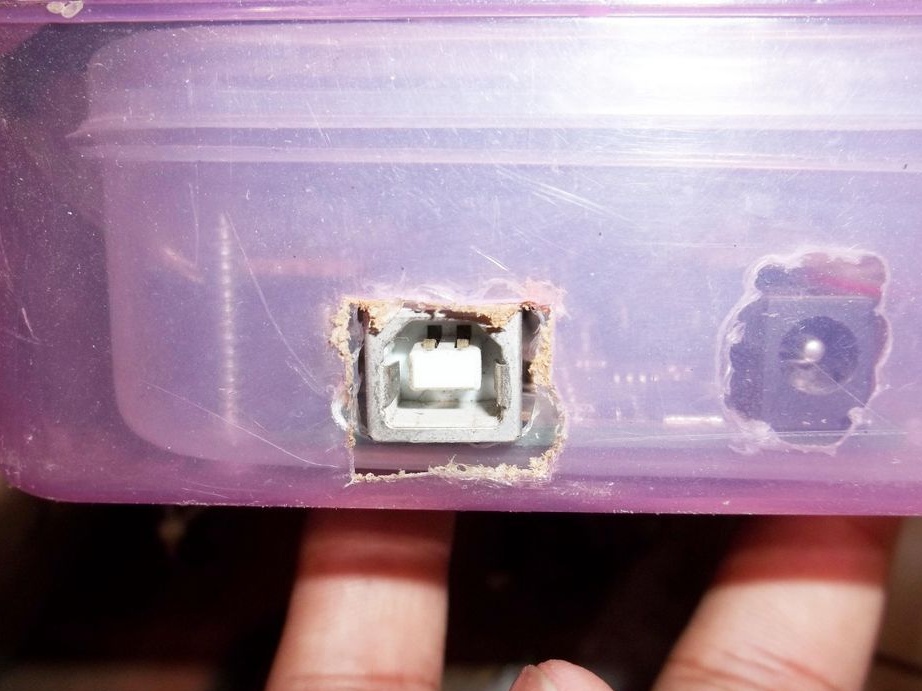
- Στη συνέχεια, ο πίνακας Arduino τοποθετήθηκε στη θήκη έτσι ώστε η έξοδος USB να αγγίξει τον τοίχο. Έγινε αποκοπή μιας οπής για αυτή την έξοδο, κάτι που θα συνέβαλε στη φόρτωση πρόσθετων προγραμμάτων στο μηχάνημα ή στη διόρθωση υφιστάμενων προγραμμάτων. Στις πλευρές του κουτιού, κόπηκαν τρύπες για τα καλώδια που θα πήγαιναν από το χαρτόνι. Πρόσθετες οπές κόπηκαν στο κάτω μέρος του κουτιού, κάτω από τους συνδέσμους στερέωσης Arduino.


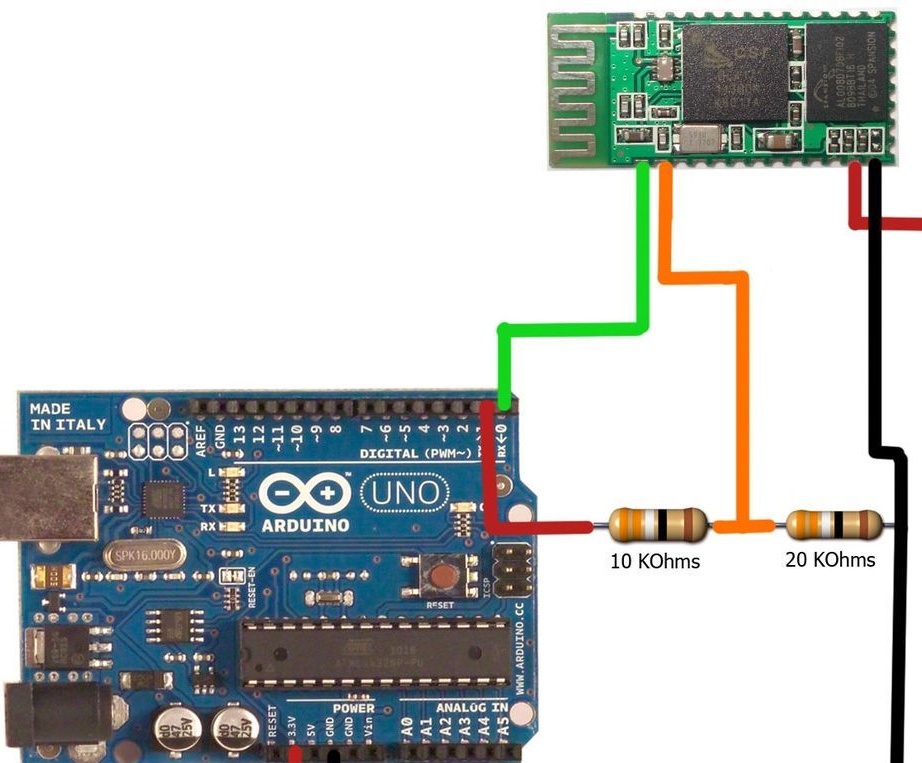
Βήμα τρίτο Πομποδέκτη Bluetooth.
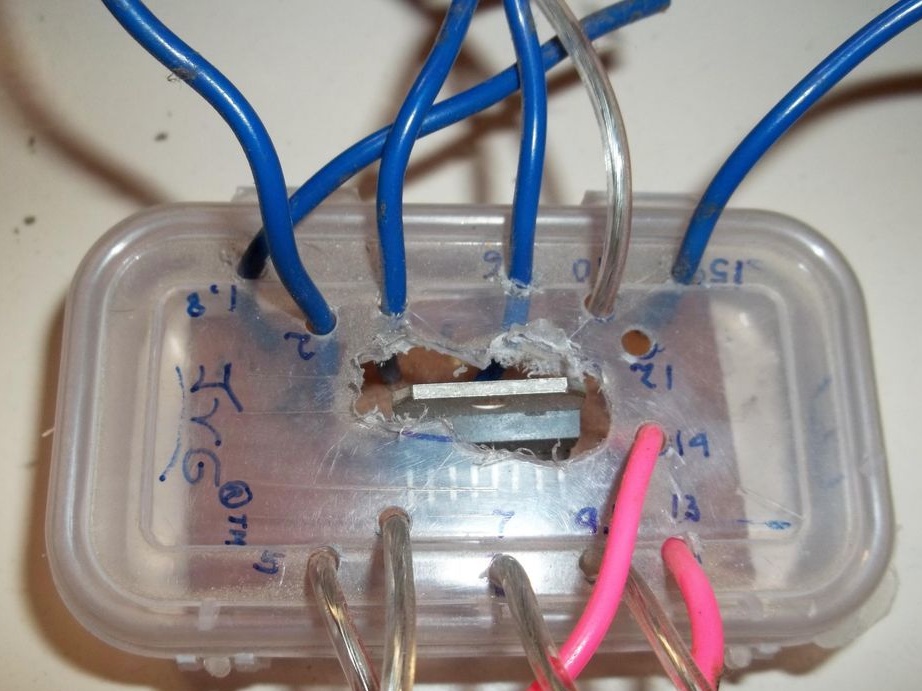
Η συγκόλληση καλωδίων σε έναν πομποδέκτη Bluetooth είναι το πιο δύσκολο έργο στη συναρμολόγηση αυτού του έργου, ο συγγραφέας δεν έλαβε πραγματικά ένα τρίτο χέρι κατά την συγκόλληση. Χρησιμοποιήθηκαν τέσσερις αγωγοί μήκους 10 cm, συγκολλημένοι σε πείρους 1 (Τχ), 2 (Rx), 12 (+ 3.3Β) και 13 (GND). Τώρα ο πομποδέκτης θα μπορούσε να τοποθετηθεί σε ένα περίβλημα με προετοιμασμένες τρύπες για τα καλώδια. Ο συντάκτης κολλήσει τα καλώδια στο κουτί για να αποτρέψει τα καλώδια από το σχίσιμο των επαφών.



Το τέταρτο βήμα. Στέγαση για αντιστάσεις.
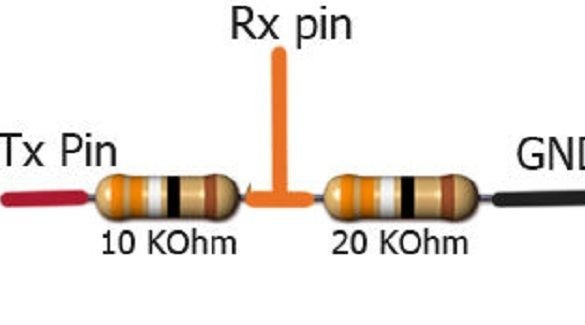
Λόγω του γεγονότος ότι η έξοδος Arduino Tx στέλνει ένα σήμα με τάση 5V και η μονάδα Bluetooth λειτουργεί με τάση 3.3V, ήταν απαραίτητο να μετατραπεί το 5V σε 3.3V. Για το έργο αυτό, ο συγγραφέας χρησιμοποίησε διαιρέτη τάσης. Σύμφωνα με το κύκλωμα που παρέχεται παρακάτω, έβαλε μια αντίσταση στο υπόλοιπο κομμάτι του breadboard. Φυσικά, ήταν δυνατό να βάλουμε αυτό το κύκλωμα σε μια περίπτωση Arduino, αλλά δεν υπήρχε αρκετός χώρος, οπότε ο συγγραφέας έκανε ξεχωριστή για τις αντιστάσεις.


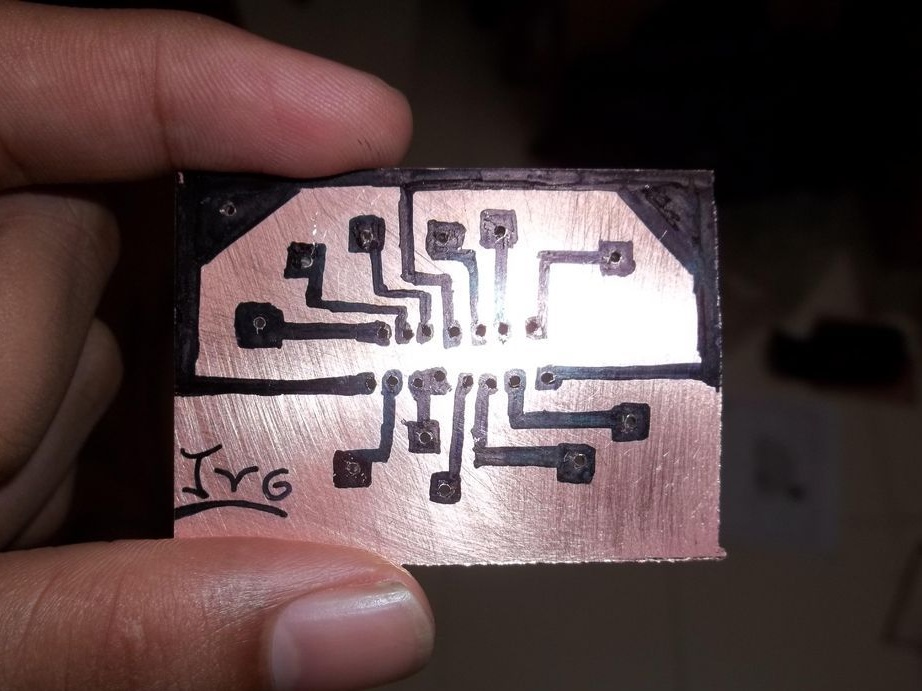
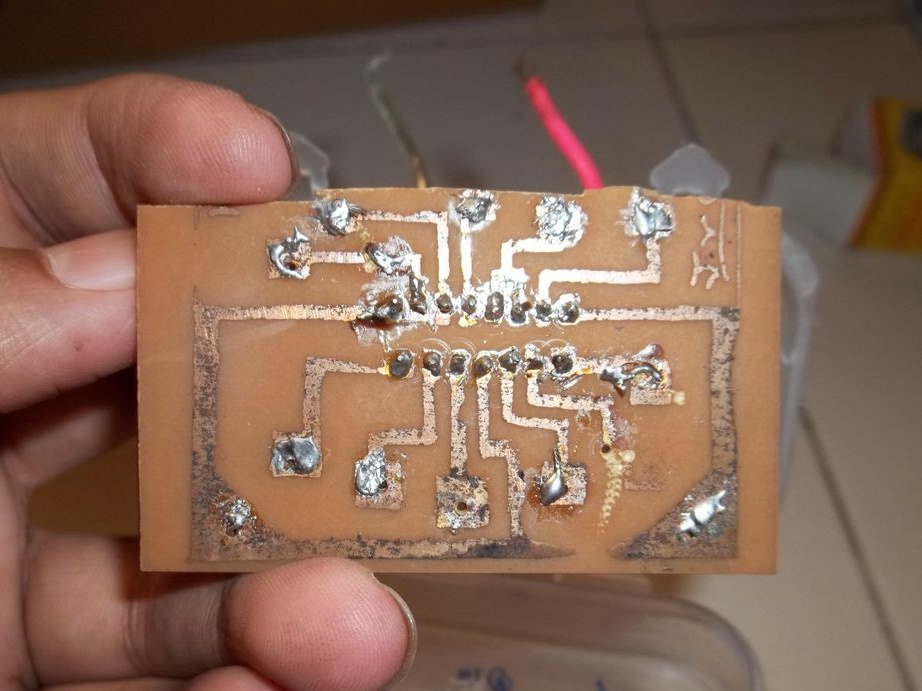
Βήμα πέντε Οδηγός κινητήρα.
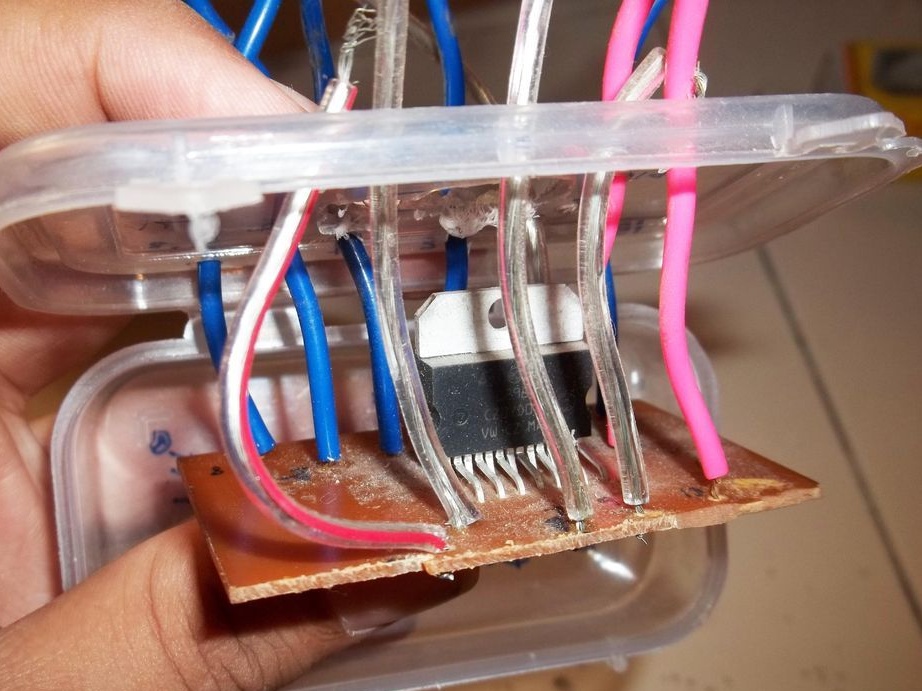
Ο συγγραφέας χρησιμοποιεί ένα διπλό οδηγό με μια L-θύρα H-γέφυρας L298, ελέγχει τέσσερις κινητήρες. Για αυτόν, ο δημιουργός δημιούργησε ένα διοικητικό συμβούλιο για να διευκολύνει τη σύζευξη συρμάτων σε αυτόν, το ίδιο το διοικητικό συμβούλιο στην παρακάτω φωτογραφία. Μετά τη συγκόλληση, ο οδηγός τοποθετήθηκε επίσης σε ξεχωριστή θήκη με οπές για τα καλώδια.
Βήμα έξι Η τελική συναρμολόγηση.
Κάθε μεμονωμένο στοιχείο συνδέεται με το Arduino σύμφωνα με το σχέδιο.
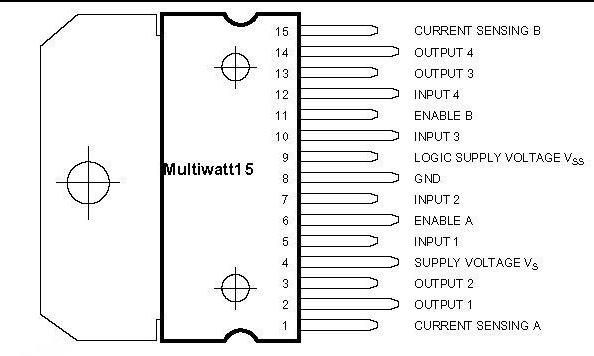
Η σύνδεση του οδηγού του κινητήρα με το Arduino έγινε σύμφωνα με αυτό το pinout:
1 στο GND
2 στην πρώτη επαφή των αριστερών κινητήρων
3 στη δεύτερη επαφή των αριστερών κινητήρων
4 σε μια μπαταρία 12V
5 στο pin Arduino 2
6 στην καρφίτσα Arduino 3
7 στο pin Arduino 4
8 στο GND
9 έως 5V με το Arduino
10 στο pin Arduino 5
11 στο pin Arduino 6
12 στην καρφίτσα Arduino 7
13 στην πρώτη επαφή των δεξιών κινητήρων
14 στη δεύτερη επαφή των δεξιών κινητήρων
15 έως GND
Η ισχύς 12V συνδέθηκε με τον ακροδέκτη Vin Arduino και τον ακροδέκτη 4 του L298. GND Arduino αντίστοιχα με την τροφοδοσία GND.
Έβδομο βήμα. Πρόγραμμα για το Arduino.
Για να λειτουργήσει σωστά το πρόγραμμα, ήταν απαραίτητο να εγκαταστήσετε τη βιβλιοθήκη Amarino, η οποία μπορεί να μεταφορτωθεί. Μπορείτε να κατεβάσετε τον πηγαίο κώδικα για το Arduino κάτω από το άρθρο.
Βήμα Οκτώ. Λογισμικό για Android
Η βιβλιοθήκη Amarino είναι ένα εργαλείο για την εργασία με τα smartphones Android. Με την εγκατάσταση μιας πρόσθετης εφαρμογής στο τηλέφωνό σας, θα μπορούσατε να ξεκινήσετε να γράφετε ένα πρόγραμμα.
Η εφαρμογή και το plugin της Amarino μπορούν να μεταφορτωθούν από το. Αφού τα εγκαταστήσατε στο τηλέφωνο, παρέμεινε μόνο για να ενεργοποιήσετε το μηχάνημα και να συνδεθείτε με αυτό και επιλέξτε την ενότητα Add Events-> Sensor Accelerometer.
Βίντεο με την εγκατάσταση του Amarino και των plugins του:
Η ταχύτητα του μηχανήματος είναι ίση με τη δύναμη του τηλεφώνου. Εάν το μηχάνημα μετακινηθεί προς λάθος κατεύθυνση, πρέπει να εναλλάξετε τα καλώδια από τους κινητήρες.