


Αλλά πρώτα, ας δούμε τι είναι και γιατί είναι απαραίτητο. Στην πραγματικότητα, το όνομά του μας λέει το σκοπό της. Αποτελείται από τη λατινική λέξη καμπύλη, που σημαίνει κυρτή ή κυματιστή. Δηλαδή, ένα καμπύλη μέτρησης είναι ένας μετρητής απόστασης τροχού ή κυλίνδρου. Διακρίνονται δύο τύποι καμπυλών: μικρά (χαρτογραφικά), τα οποία συνήθως χρησιμοποιούνται για μετρήσεις στο χάρτη και μεγάλα (οδικά), τα οποία συνήθως χρησιμοποιούνται για τη μέτρηση του μήκους των καμπυλωμένων τμημάτων των ήδη αυτοκινητοδρόμων. Μπορούν να χρησιμοποιηθούν όπου είναι ακατάλληλο ή αδύνατο να μετρηθεί με την τυπική ρουλέτα, επομένως το έργο υπόσχεται να είναι ενδιαφέρον.
Το πρώτο πράγμα που πρέπει να προσέξουμε κατά την κατασκευή της καμπύλης μέτρησης είναι ο τροχός ή ο κύλινδρος. Πρέπει να είναι αρκετά μικρό ώστε η ακρίβεια του οργάνου να είναι υψηλή, ενώ ταυτόχρονα πρέπει να είναι αρκετά μεγάλη ώστε η τιμή των ενδείξεων να μην επηρεάζεται σε μεγάλο βαθμό από την ανομοιομορφία της μετρούμενης επιφάνειας. Στην περίπτωσή μου, ο τροχός έχει διάμετρο 14 εκατοστών.

Τώρα πρέπει να προσδιορίσετε το υλικό και το μέγεθος της δομής. Χρησιμοποίησα ένα δέντρο.

Στις μπάρες έκανα μια σήμανση και έκανα τα απαραίτητα κομμάτια και τρύπες.

Στη συνέχεια συναρμολογήσαμε τα κατεργασμένα εξαρτήματα χρησιμοποιώντας μικρές βίδες αυτοεπιπεδώματος.
Τώρα ας ξεπεράσουμε λίγο από το ίδιο το καμπύλο σκελετό και σκεφτούμε πώς το πράγμα αυτό μπορεί να καθορίσει ακόμη και την απόσταση; Όλα είναι αρκετά απλά. Απλά πρέπει να υπολογίσουμε τον αριθμό των στροφών του τροχού και να πολλαπλασιάσουμε το μήκος της εξωτερικής περιφέρειας του και είναι ακόμα ευκολότερο να προσθέσουμε μια τιμή μήκους κάθε φορά που ο τροχός κάνει άλλη μια επανάσταση.
Για να μετρήσετε κάθε επανάσταση στην απλούστερη περίπτωση, μπορείτε να χρησιμοποιήσετε την "ολισθαίνουσα επαφή". Ωστόσο, δεν προτείνω τη χρήση ενός τέτοιου μηχανισμού αναφοράς. Είναι πολύ καλύτερο να χρησιμοποιήσετε ένα διακόπτη καλαμιού ή έναν αισθητήρα Hall.
Ήρθε η ώρα να δοκιμάσετε έναν τροχό. Θα το στερεώσω με ένα μακρύ μπουλόνι. Βρήκαμε μια θέση στο πλαίσιο όπου το χείλος τροχού είναι όσο το δυνατόν πιο κοντά του και σημειώστε με εγκεφαλικά επεισόδια. Γύρω από αυτή την περιοχή, πρέπει να εγκαταστήσουμε τον διακόπτη καλαμιού.

Στον τροχό πρέπει να εγκαταστήσετε ένα μικρό μαγνήτη.Βεβαιωθείτε ότι η αντοχή του θα είναι αρκετή για να κλείσετε τις επαφές του διακόπτη καλαμιού.
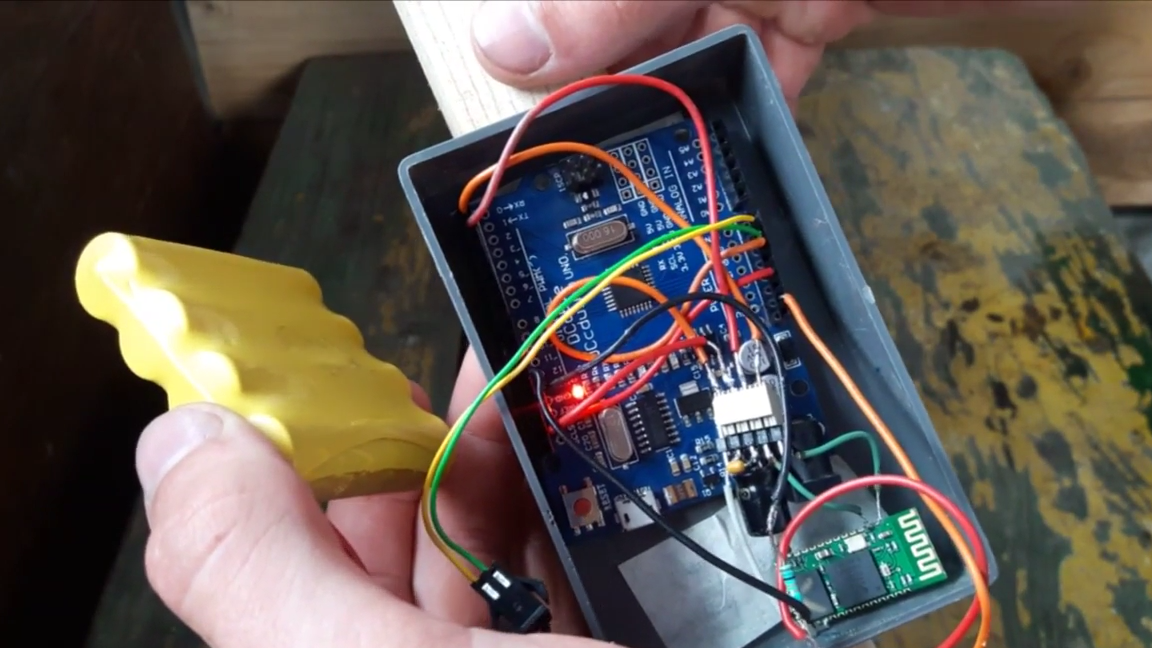
Τώρα θα ασχοληθούμε με "εγκεφάλους" του συστήματος. Στην περίπτωσή μου, αυτό είναι ένα τέλος Arduino UNO. Θα διαβάσει την κατάσταση του διακόπτη καλαμιού και θα μεταφέρει δεδομένα στο τηλέφωνό σας μέσω σύνδεσης Bluetooth, χρησιμοποιώντας τη μονάδα HC-05. Παρεμπιπτόντως, ο διακόπτης καλαμιού είναι συνδεδεμένος με τον πίνακα σαν ένα κανονικό κουμπί. Νομίζω ότι δεν πρέπει να υπάρχουν προβλήματα με τη σύνδεση της μονάδας Bluetooth.
Όσο για τον ίδιο τον κώδικα, είναι πολύ απλό. Και προσπάθησα να το σχολιάσω έτσι ώστε τα πάντα να ήταν όσο το δυνατόν πιο ξεκάθαρα.
int gercon = 12; // συνδέσατε τον διακόπτη καλαμιού σε 12 ακίδες
διπλή απόσταση = 0; // δημιούργησε μια διπλή μεταβλητή για να αποθηκεύσει την απόσταση
άκυρη ρύθμιση () {
Serial.begin (9600); // συνδεδεμένη σειριακή σύνδεση
}}
void loop () {
/ * Επόμενος είναι ο βρόχος if. Εάν ο διακόπτης καλαμιού είναι κλειστός, τότε πραγματοποιείται ο υπολογισμός της επόμενης απόστασης. Η τιμή 0.46472 είναι ήδη το υπολογιζόμενο μήκος μιας περιστροφής του τροχού. Για να αποφύγετε "επιπλέον" δεδομένα, προσθέστε μια καθυστέρηση 200 χιλιοστών του δευτερολέπτου και εμφανίστε τις αναγνώσεις
* /
αν (digitalRead (gercon) == HIGH)
{
απόσταση = απόσταση + 0,46472;
καθυστέρηση (200).
Serial.println (απόσταση);
}}
}} 
Εδώ είναι η καμπύλη μας και είναι έτοιμη!
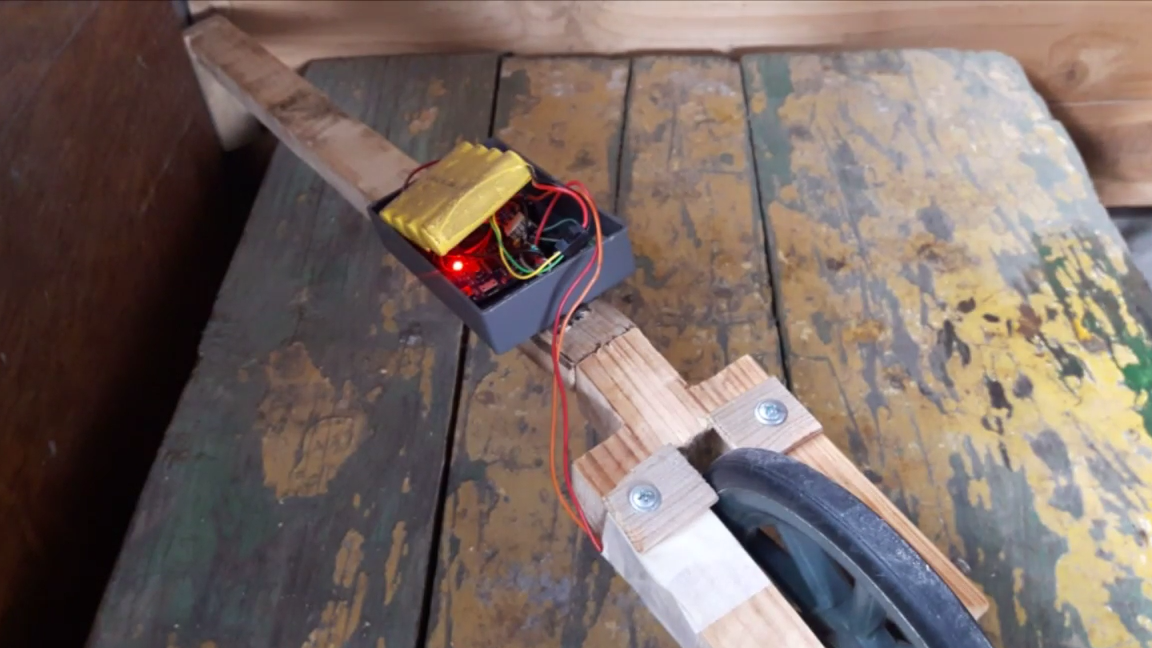
Ας κάνουμε μερικούς αγώνες δοκιμών. Όλα λειτουργούν τέλεια!

Μπορείτε να παρακολουθήσετε ένα βίντεο στη συναρμολόγηση αυτής της συσκευής, ίσως θα βρείτε κάτι ενδιαφέρον.
[media = https: //youtu.be/kx_7ztPsLws]
Έχετε μια καλή επανάληψη του έργου!