


Έλαβα μέρος του σχεδιασμού μου από τις οδηγίες συναρμολόγησης για το Lego Technic 42029. Οι υπόλοιποι είναι ο αυτοσχεδιασμός μου. Έτσι χρειαζόμαστε:
- Lego Technic 42029
- Arduino Nano 382P
- DRV 8833 (καλύτερη από την Populus, αλλά είναι επίσης δυνατή μια κινεζική αντίστοιχη)
- 2 σερβομηχανισμοί SG-90
- Δέκτης IR
- κιβώτιο ταχυτήτων κινητήρα 200 rpm
- 2 λυχνίες LED
- 2 αντιστάσεις 150 ohm
- Πυκνωτής 10v 1000uF
- 2 χτένες μονής σειράς PLS-40
- 2 υποδοχές PBS-20
- Επαγωγέας 68mkGn
- 6 μπαταρίες NI-Mn 1.2v 1000mA
- Συνδέστε τον μπαμπά-μαμά με δύο πείρους στο καλώδιο
- Homutik
- Σύρματα διαφορετικών χρωμάτων
- συγκόλληση
- Ρόζιν
- μαχαίρι χαρτικής
- συγκολλητικό σίδερο
- Βίδες 3x40 και παξιμάδια και ροδέλες για αυτά
- Βίδες 3x60
- Μπαταρίες Ni-Mn 1.2v 1000mA 6 τεμ.
Στο πρώτο βήμα συλλέγουμε το πίσω μέρος της ανάρτησης.
Πρώτον, πρέπει να συναρμολογήσετε την πίσω ανάρτηση σύμφωνα με τις οδηγίες του Lego 42029 μέρος 1, ξεκινώντας από 3 σελίδες και 8 συμπεριλαμβανομένου. Στη συνέχεια, προσθέστε μερικές λεπτομέρειες, ώστε να μπορείτε να εγκαταστήσετε τον κινητήρα και το κιβώτιο ταχυτήτων.

Βήμα 2 μπροστινή ανάρτηση.
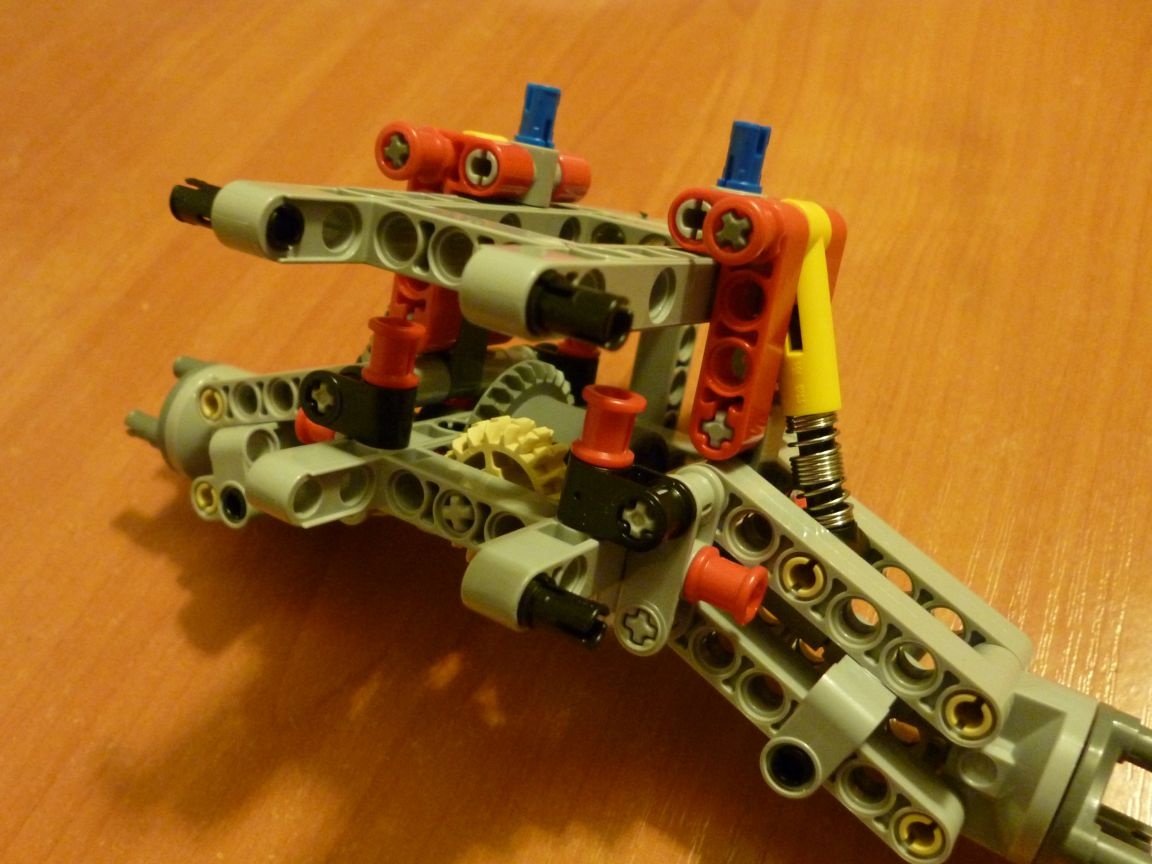
Συγκροτούμε το εμπρόσθιο μέρος της ανάρτησης σύμφωνα με τις οδηγίες του Lego 42029 μέρος 1, από τη σελίδα 21 έως το 23. Λαμβάνουμε το τραπεζοειδές από το δεύτερο μέρος των οδηγιών Lego από τη σελίδα 6 έως 11. Συγκροτούμε το βαρούλκο από το δεύτερο μέρος της σελίδας 14 - 22. Και το δεύτερο μέρος του προφυλακτήρα είναι 34-36 σελίδες.
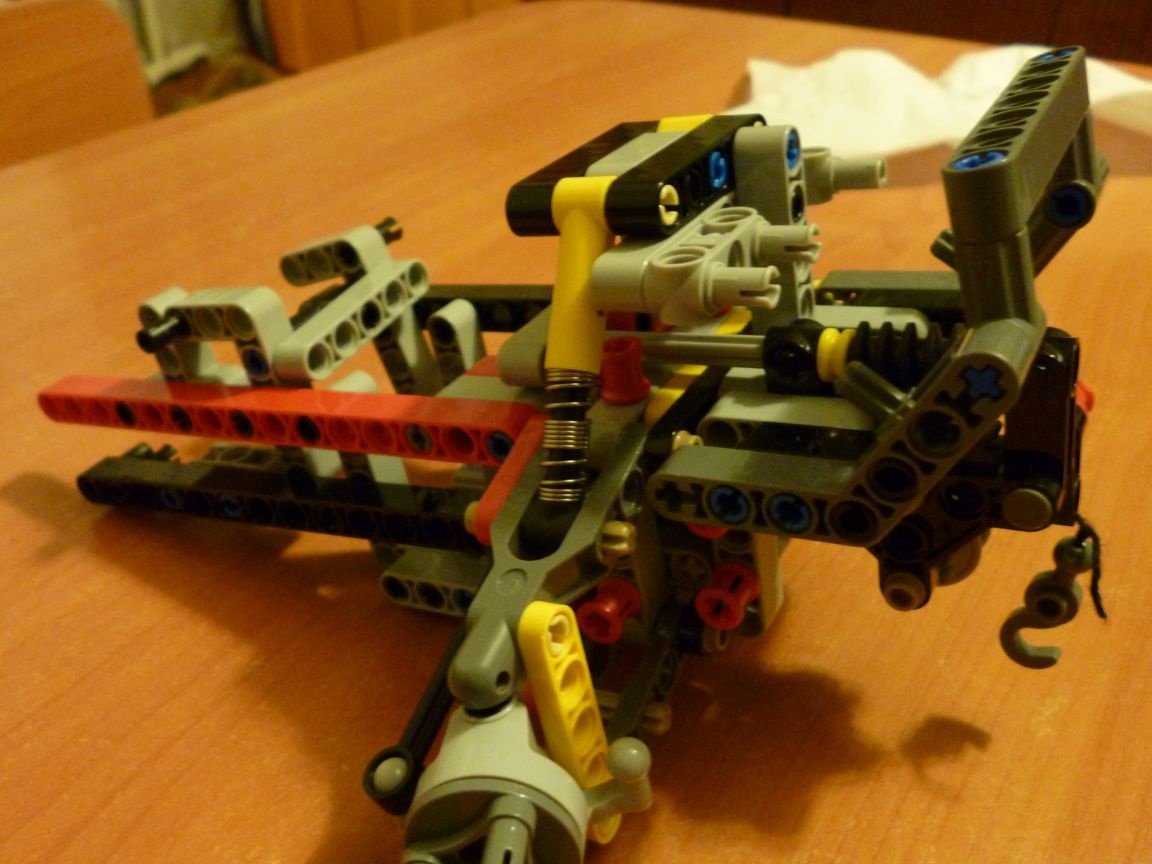

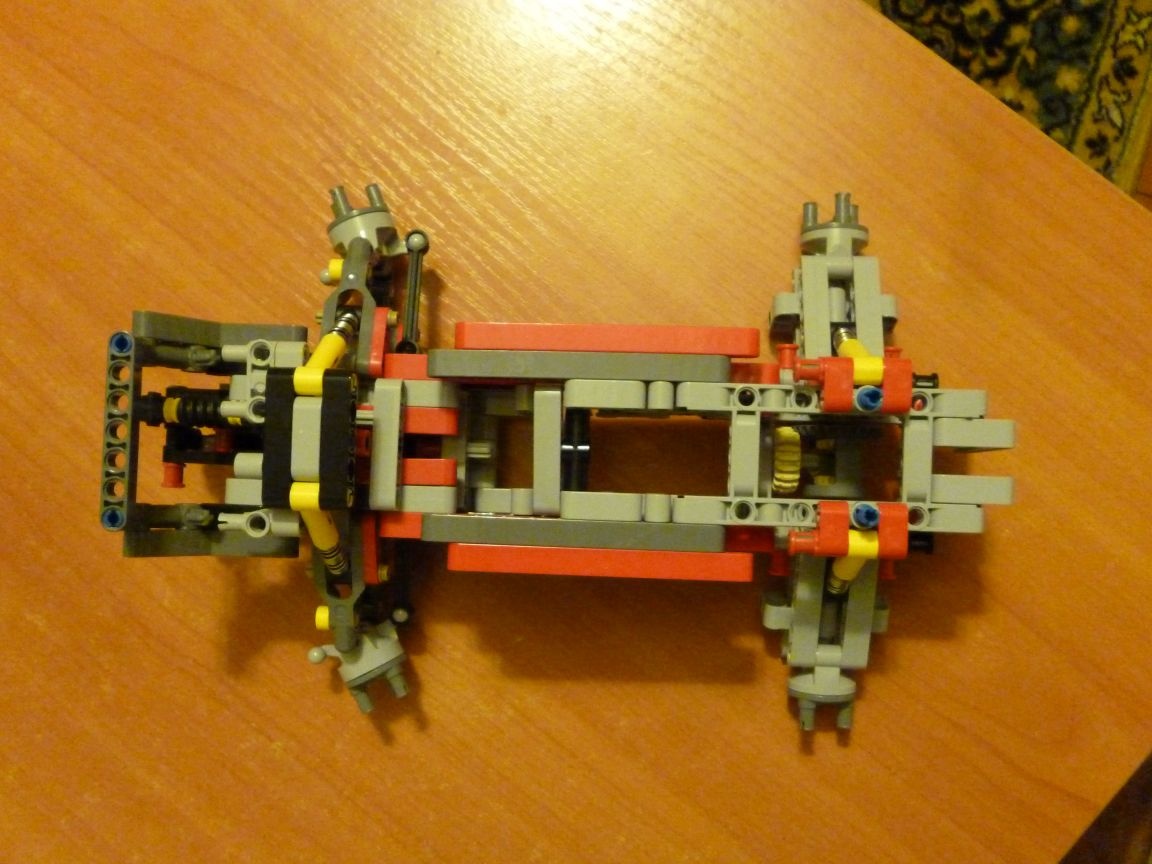
Βήμα 3 συναρμολογήστε το πλαίσιο.
Συνδέουμε και τα δύο μέρη όπως φαίνεται στη φωτογραφία:

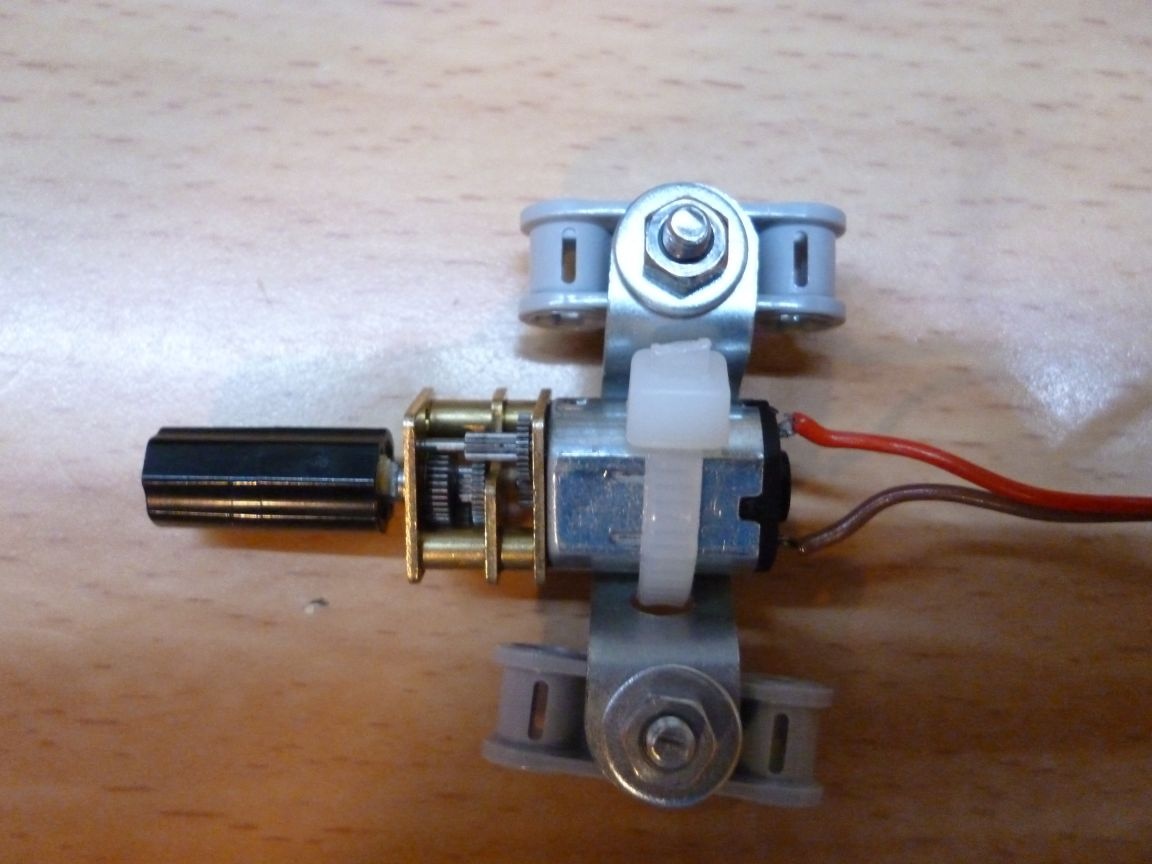
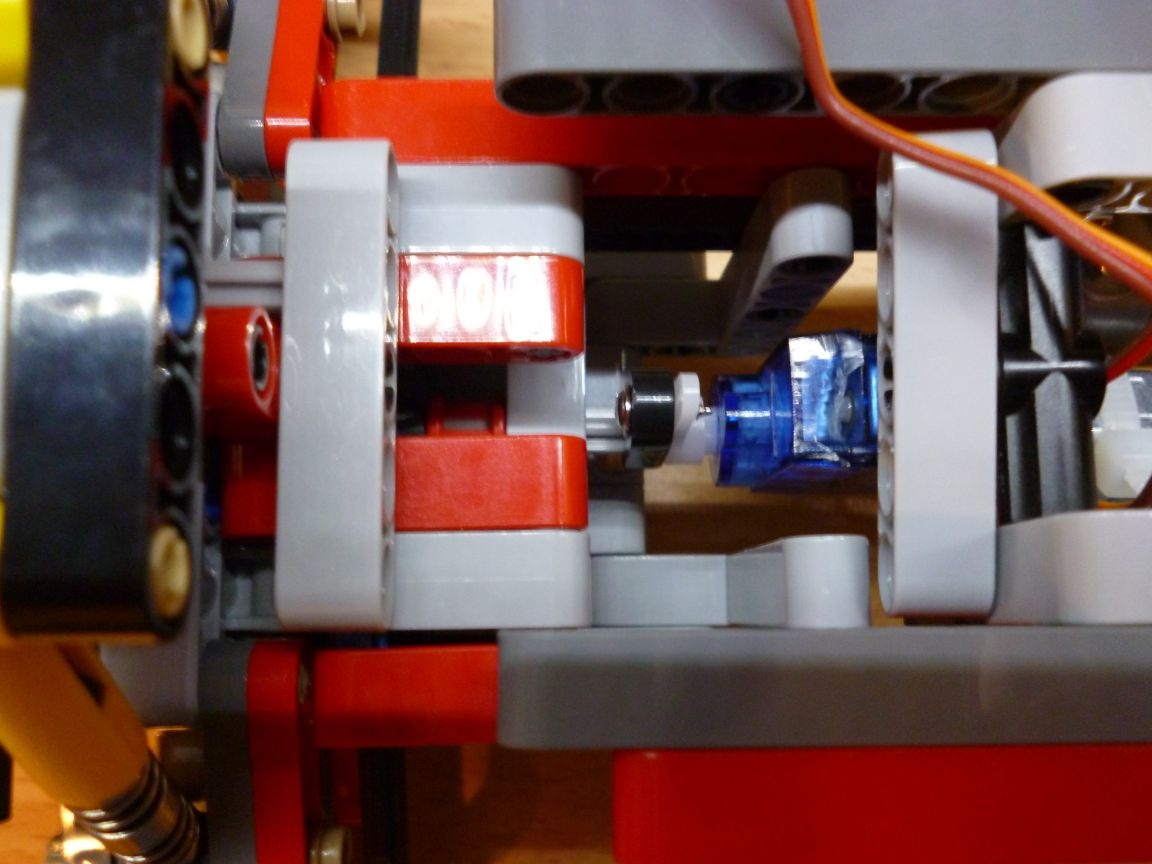
Έχω λύσει το πρόβλημα της σύνδεσης του ηλεκτρομειωτήρα με τα μέρη του σχεδιαστή ως εξής: Τοποθετήστε στον άξονα του ηλεκτρομειωτήρα ένα συνδετικό χιτώνιο και εισάγετε ένα θραύσμα ενός αγώνα για τη στερέωση. Για τη συναρμολόγηση του κινητήρα μετάδοσης χρησιμοποιείται μεταλλικό πλαστικό από σχεδιαστή σιδήρου και σφιγκτήρα.
Αποδείχθηκε τα εξής:
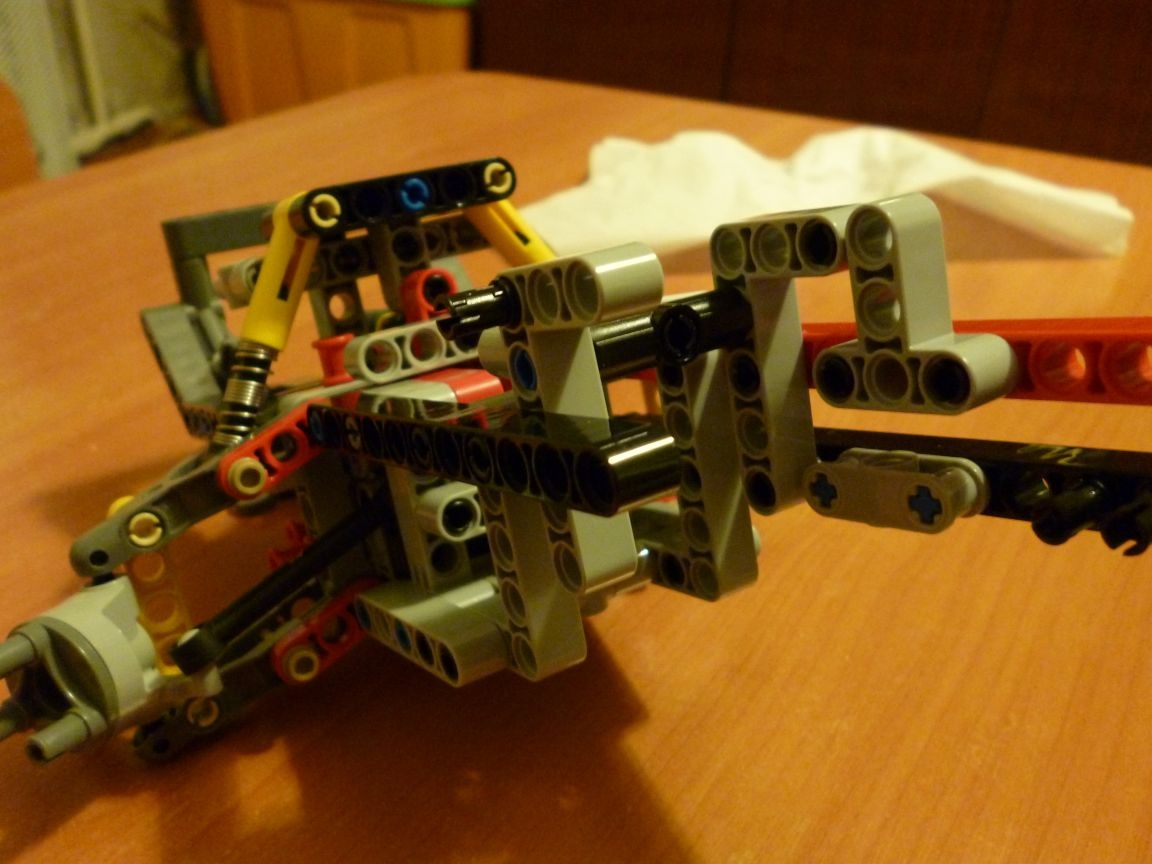
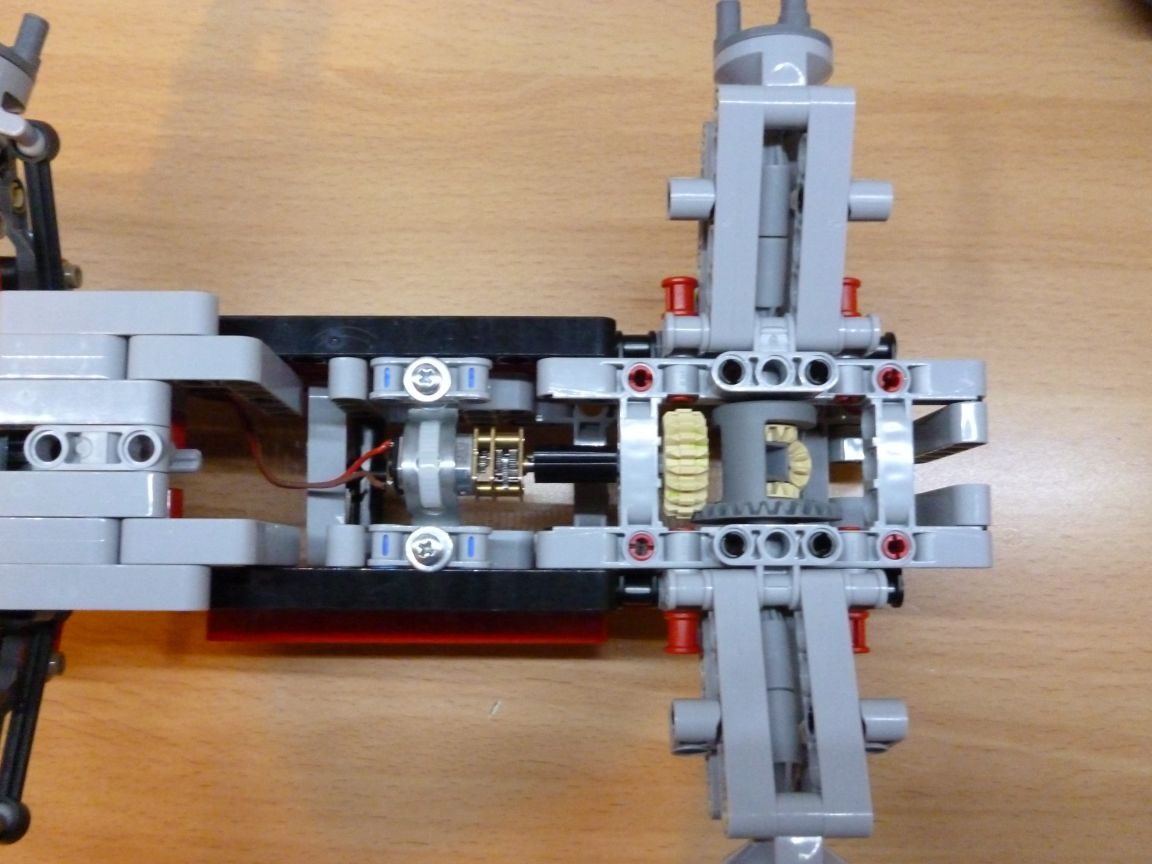
Τοποθετήστε στο πλαίσιο:
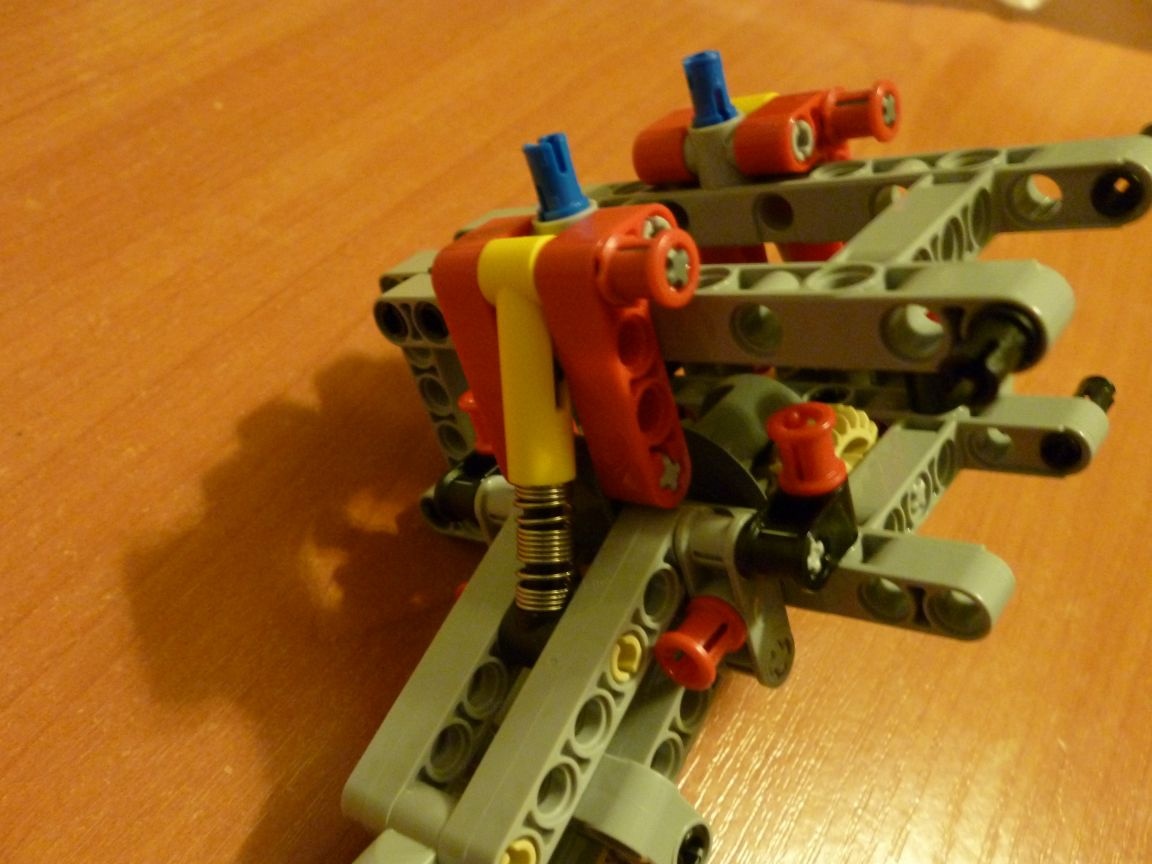
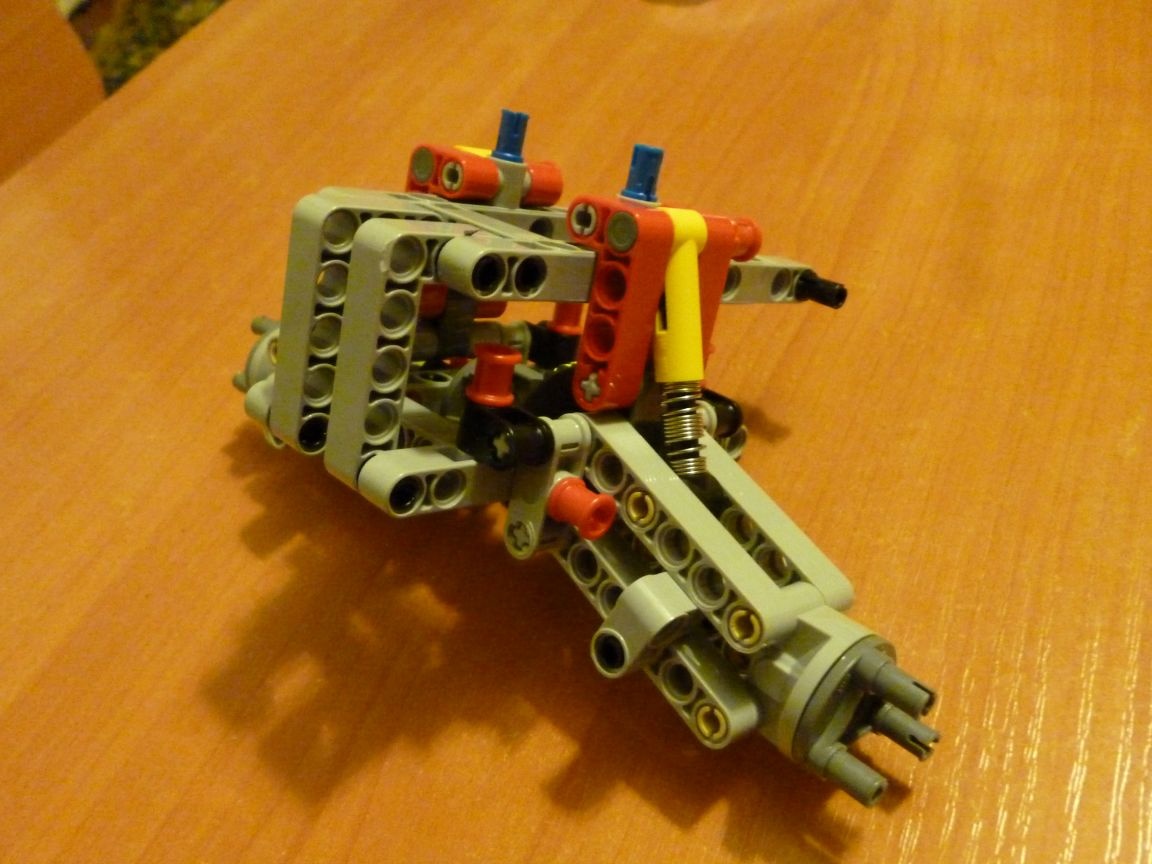
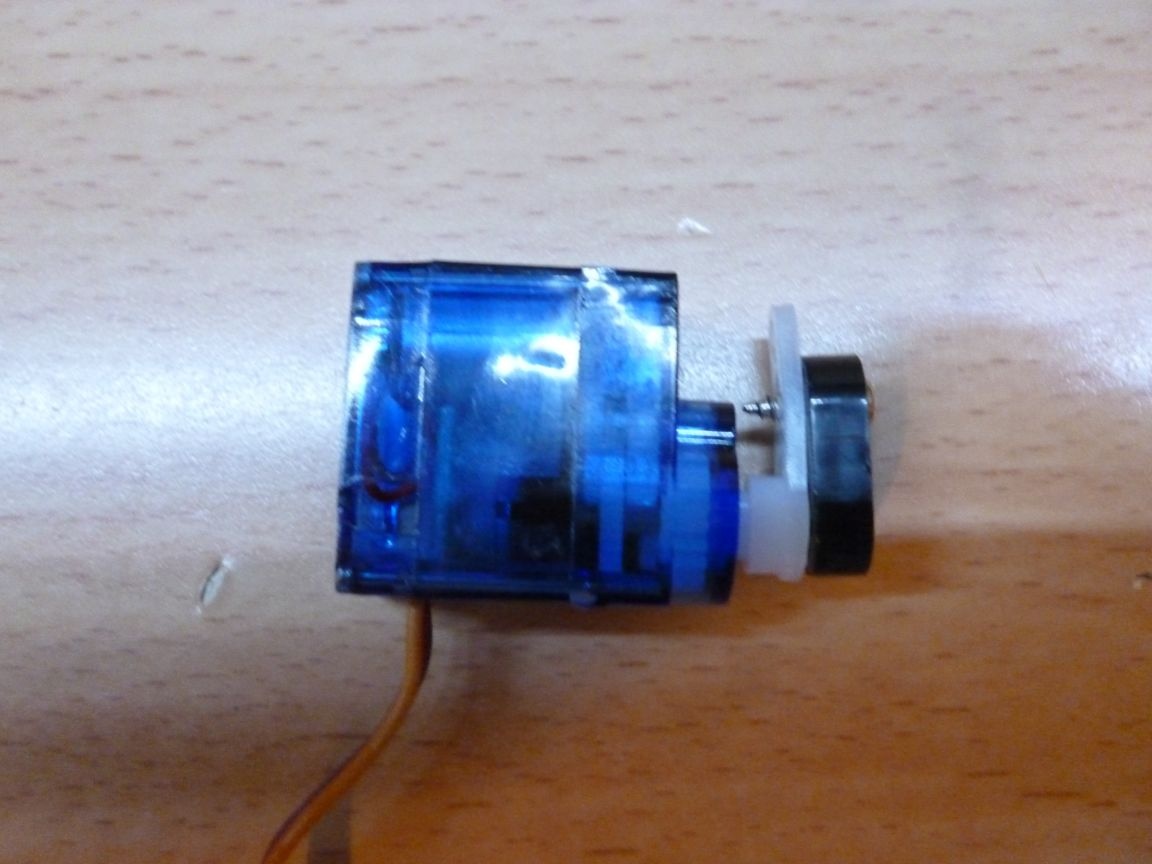
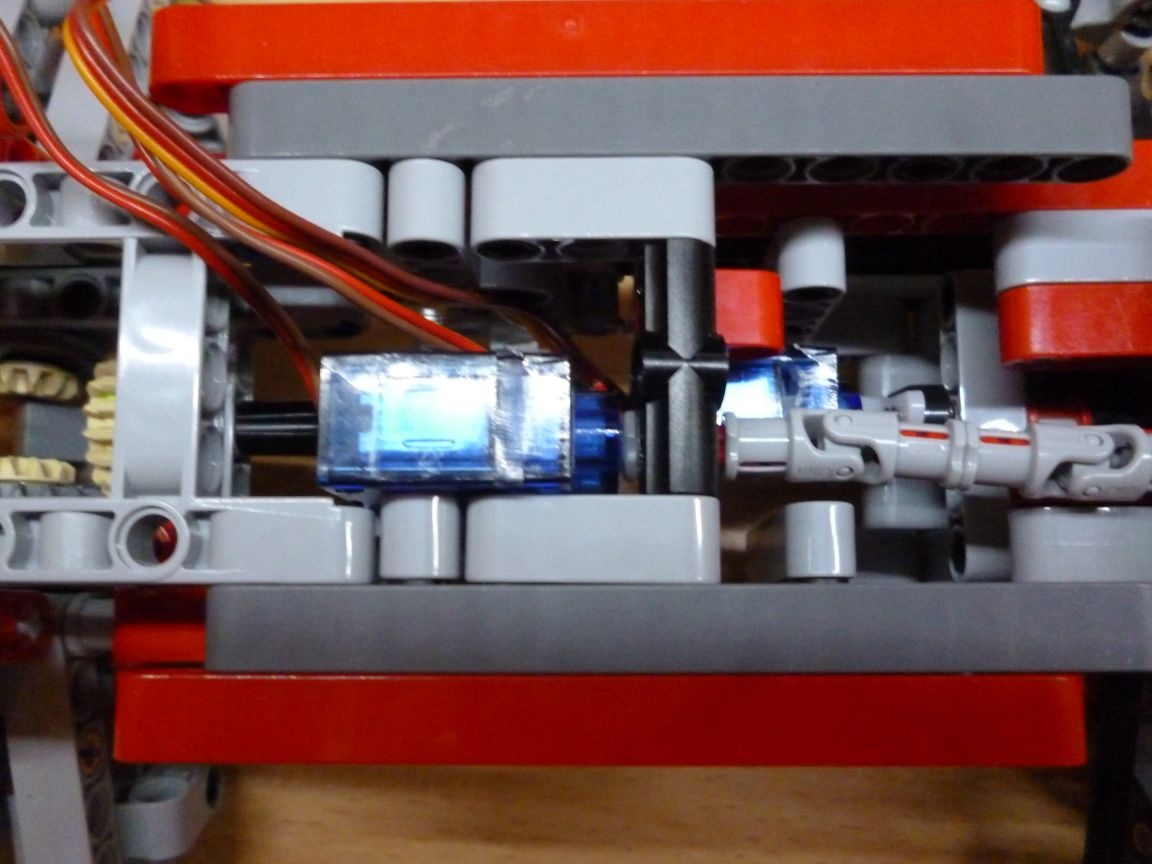
Για την εκτέλεση της περιστροφής πήρε το σέρβο SG-90. Είναι απαραίτητο να τρυπήσετε προσεκτικά, για να μην αγγίξετε τα εσωτερικά μέρη, μια διαμπερή οπή με διάμετρο 3,2 mm ή απλά κομμένη με ένα μαχαίρι χαρτικής. Επίσης κόψτε τα προεξέχοντα μέρη ("φτερά" για στερέωση). Εισαγάγουμε ένα μπουλόνι στην τρύπα και στερεώστε το με παξιμάδια. Στον άξονα του σερβομηχανισμού βάζουμε ένα μοχλό με ένα βιδωτό τμήμα από το lego:
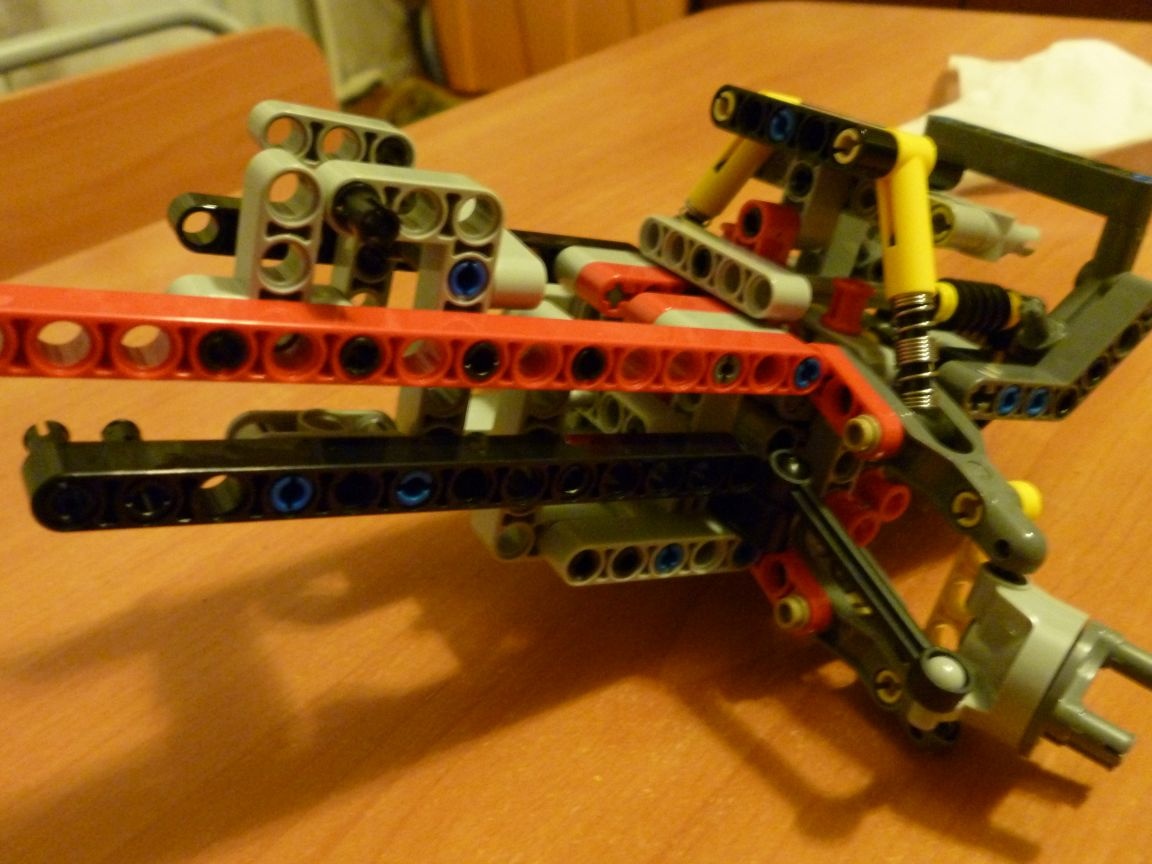
Εγκατάσταση:
Θα χρησιμοποιήσουμε το δεύτερο σέρβο για το βαρούλκο. Κάνουμε το ίδιο με το πρώτο. Και τώρα, πρέπει να εκσυγχρονιστεί έτσι ώστε να περιστρέφεται ελεύθερα. Για να γίνει αυτό, αποσυναρμολογούμε το σερβομηχανισμό, αφαιρέστε την πλακέτα και συγκολλήστε τα καλώδια απευθείας στον κινητήρα. Βγάζουμε το κύριο εργαλείο και διακόπτουμε τις στάσεις του ταξιδιού.Και τέλος, κάνουμε μια σχισμή με ένα κληρικό μαχαίρι στο κύριο εργαλείο όπως στη φωτογραφία:
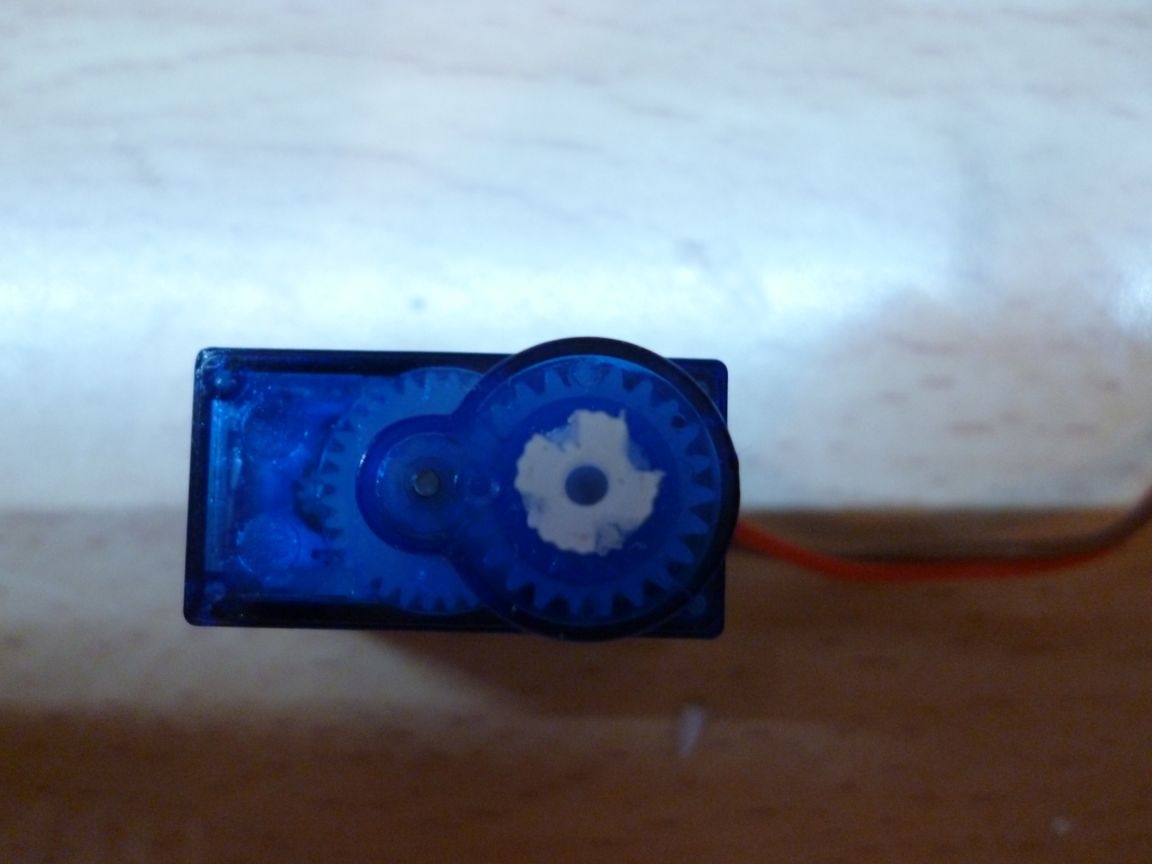
Συνδέουμε το βαρούλκο μας και βάζουμε το πλαίσιο:

Βήμα 4 Διαχείριση του ελεγκτή
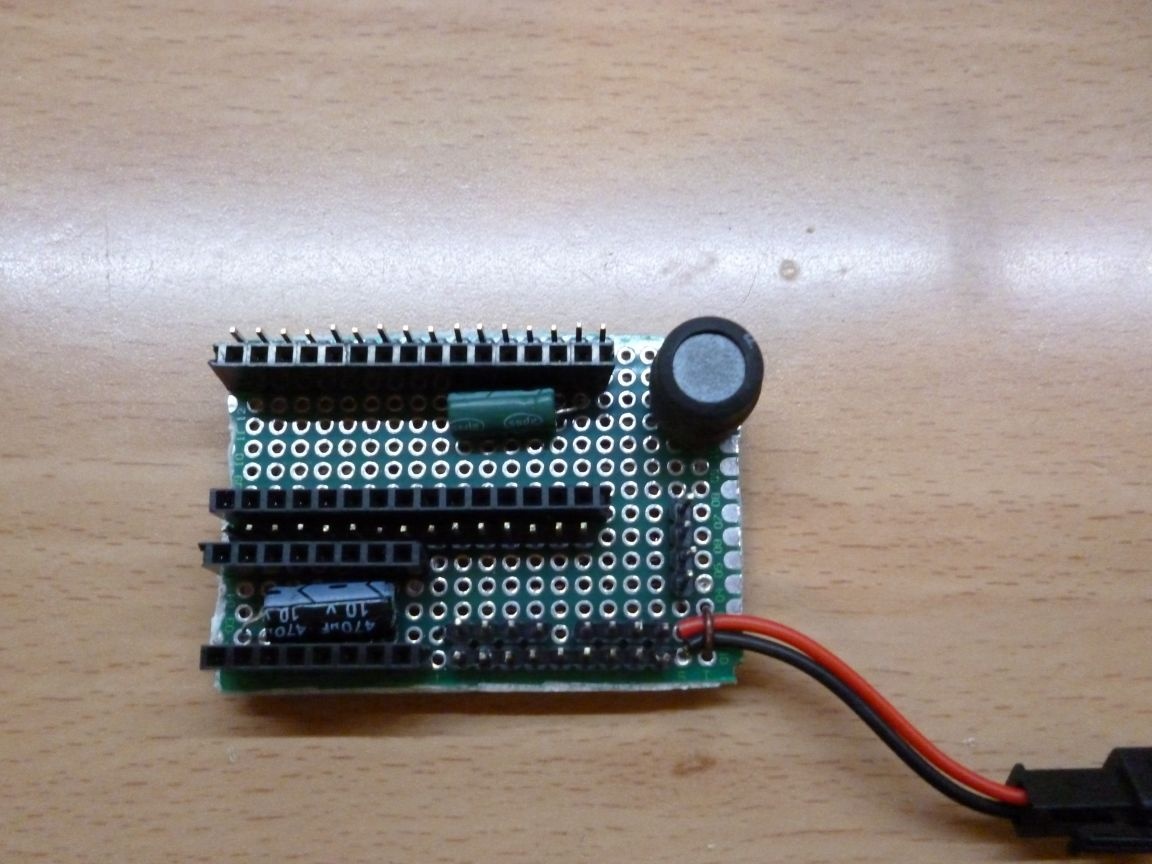
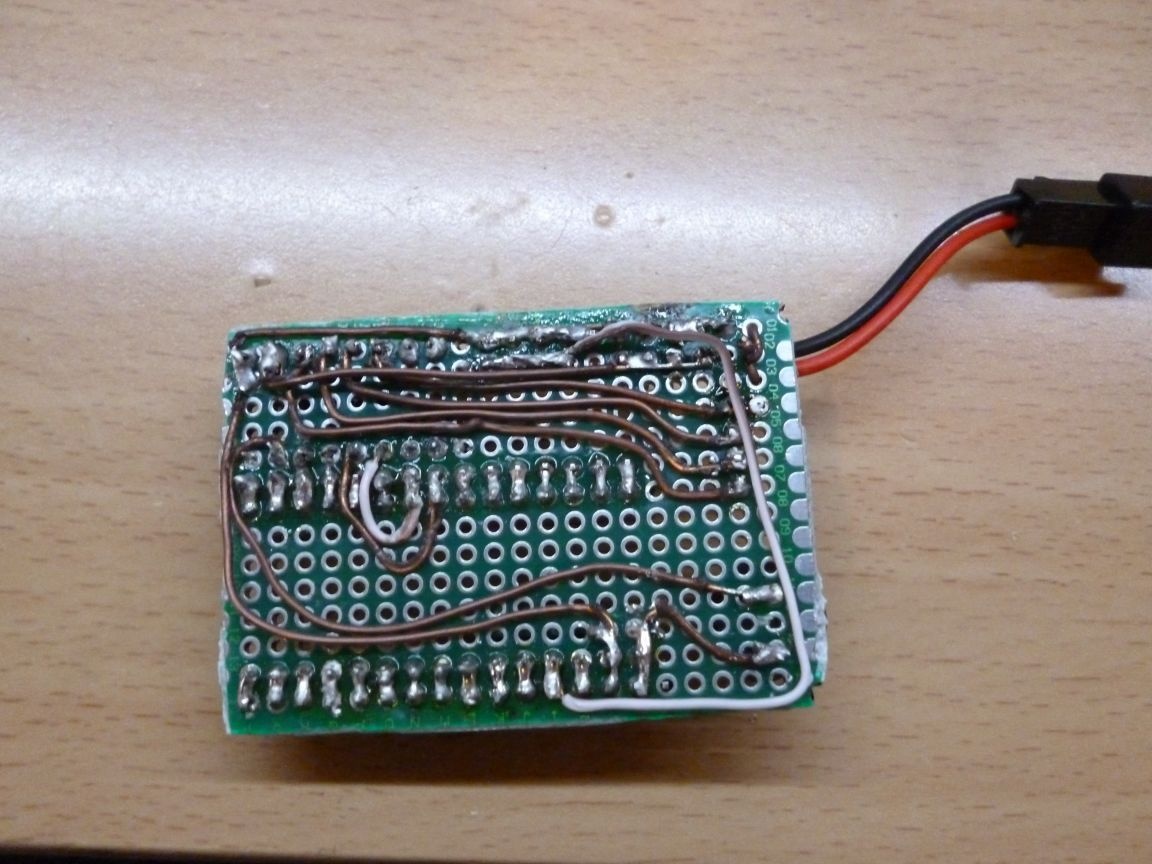
Για έλεγχο θα χρησιμοποιήσουμε το Arduino και το δέκτη IR. Λαμβάνουμε ένα συγκολλητικό σίδερο και συναρμολογούμε τα εξής στην πλακέτα:
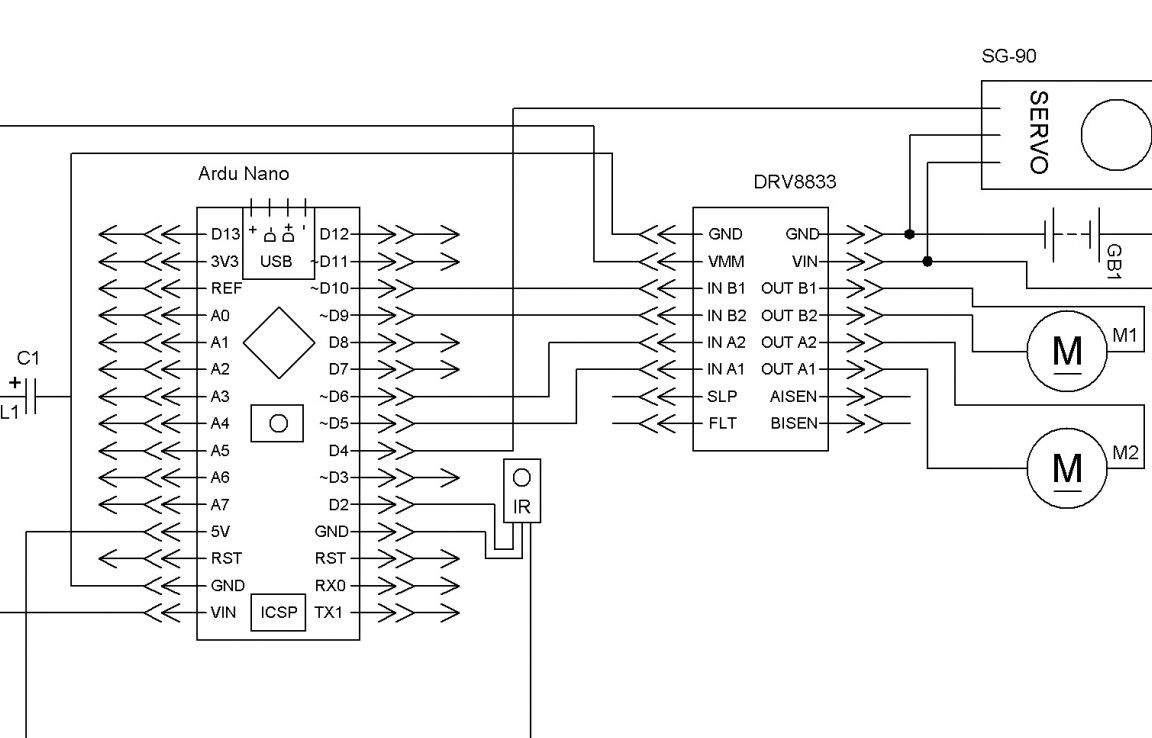
Εξηγώ: κάθε πυκνωτής χαμηλής ισχύος, το πηνίο αυτεπαγωγής θα βρείτε επίσης, θα πρέπει να σταθεροποιήσετε την τάση του μικροελεγκτή. Για τις χρησιμοποιούμενες λυχνίες LED επιλέγονται αντιστάσεις. Ο δέκτης IR ή το TSOP μπορεί να ληφθεί από ένα παλιό παιχνίδι ή να αγοραστεί σε ένα ραδιοφωνικό κατάστημα. Εάν υπάρχουν ισχυρές παρεμβολές, προσθέστε έναν πυκνωτή στο κύκλωμα ισχύος του δέκτη IR.
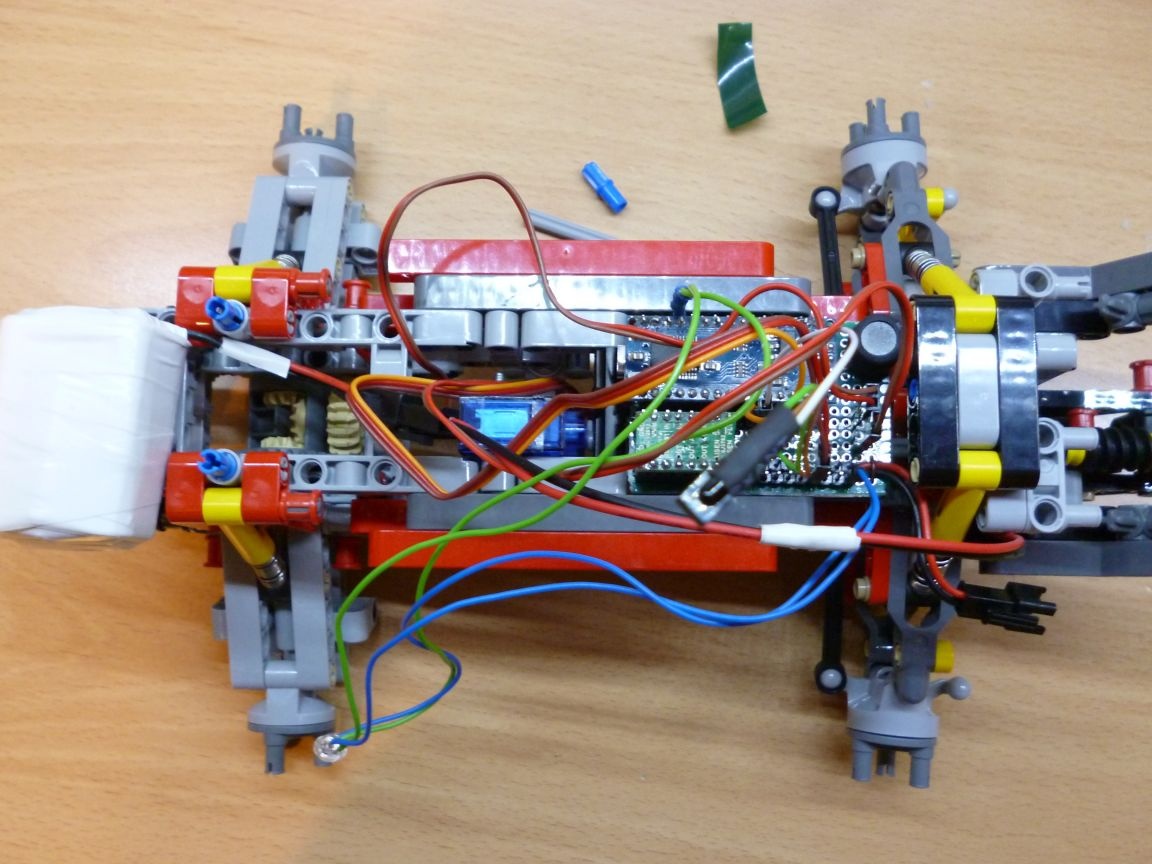
Ως αποτέλεσμα, έχουμε:
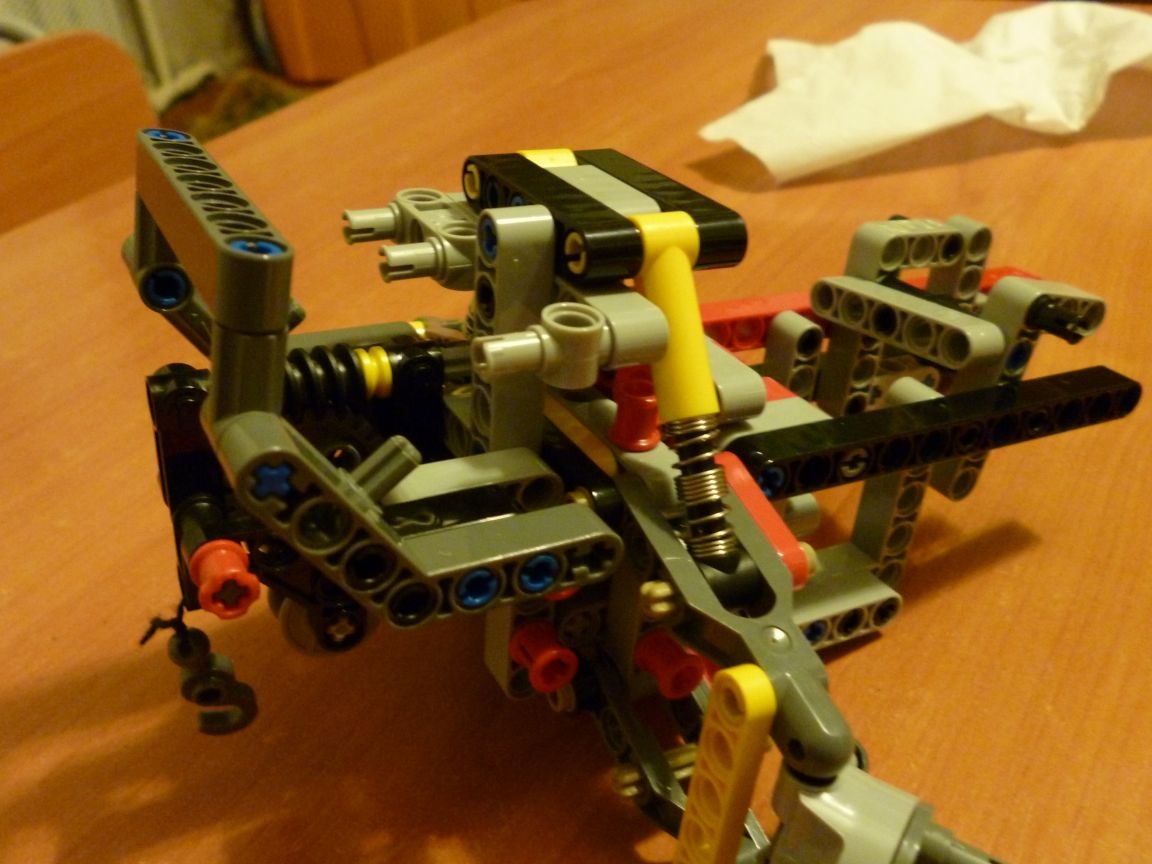
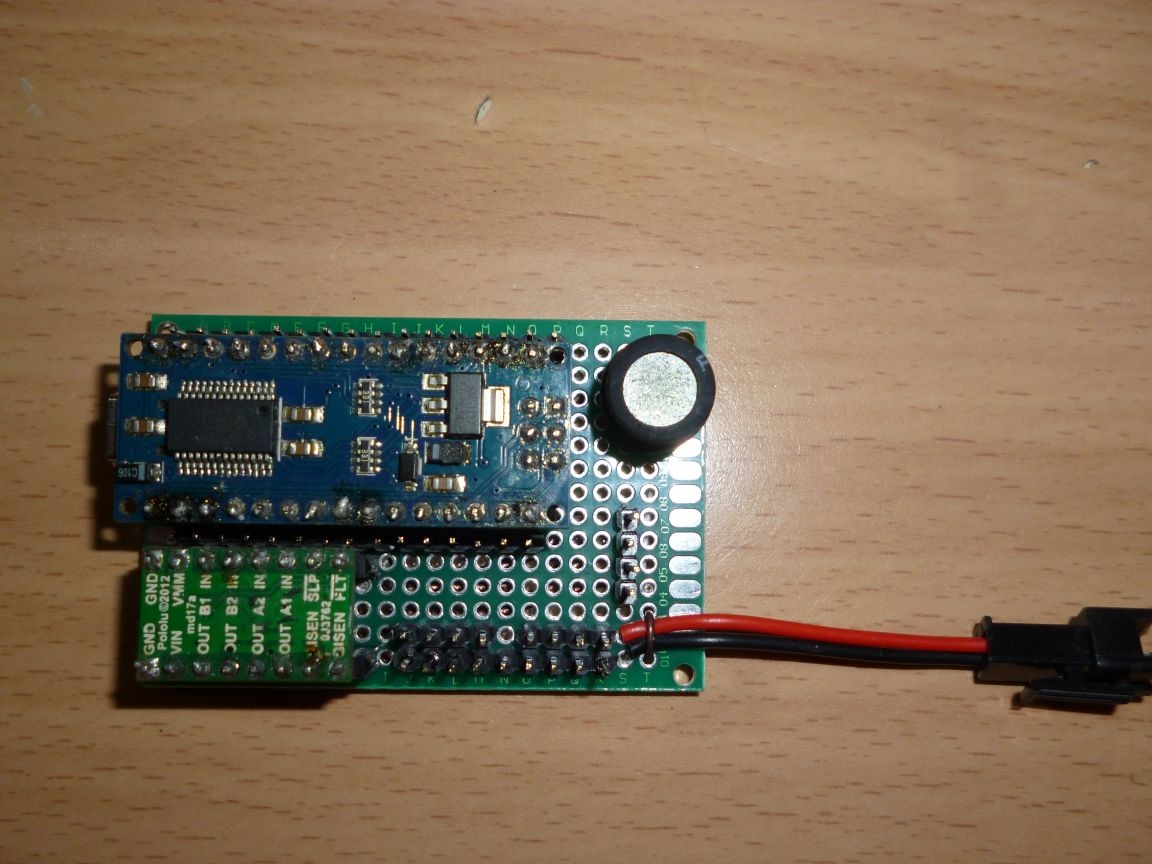
Εγκαθιστούμε το Arduino Nano και το DRV 8833 στις θέσεις τους:
Και βάλτε το διοικητικό συμβούλιο στο σασί:
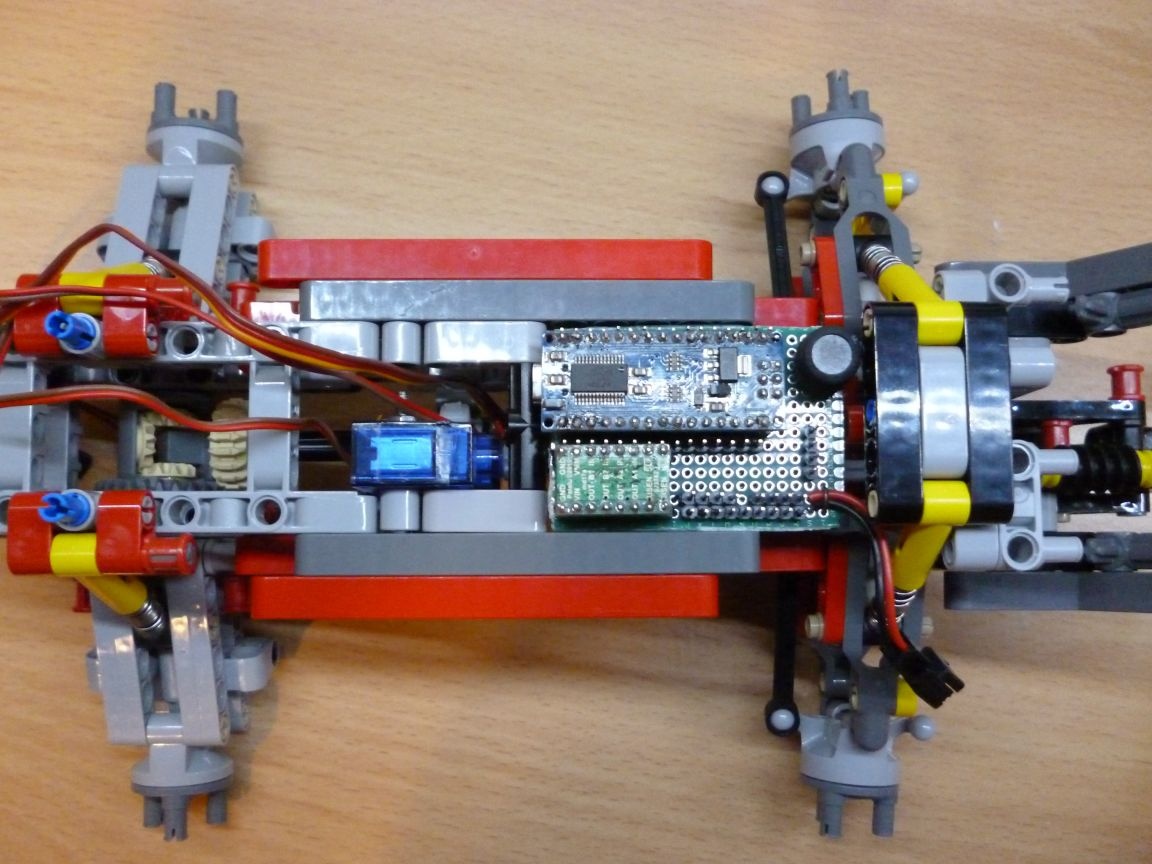
Τροφοδοσία - 6 μπαταρίες Ni-Mn 1.2v 1000mA. Είναι απαραίτητο να τα συγκολλήσετε σε σειρά και να τα βγάλετε με ηλεκτρική ταινία. Κολλήστε την ταινία διπλής όψης στο πίσω μέρος του πλαισίου.
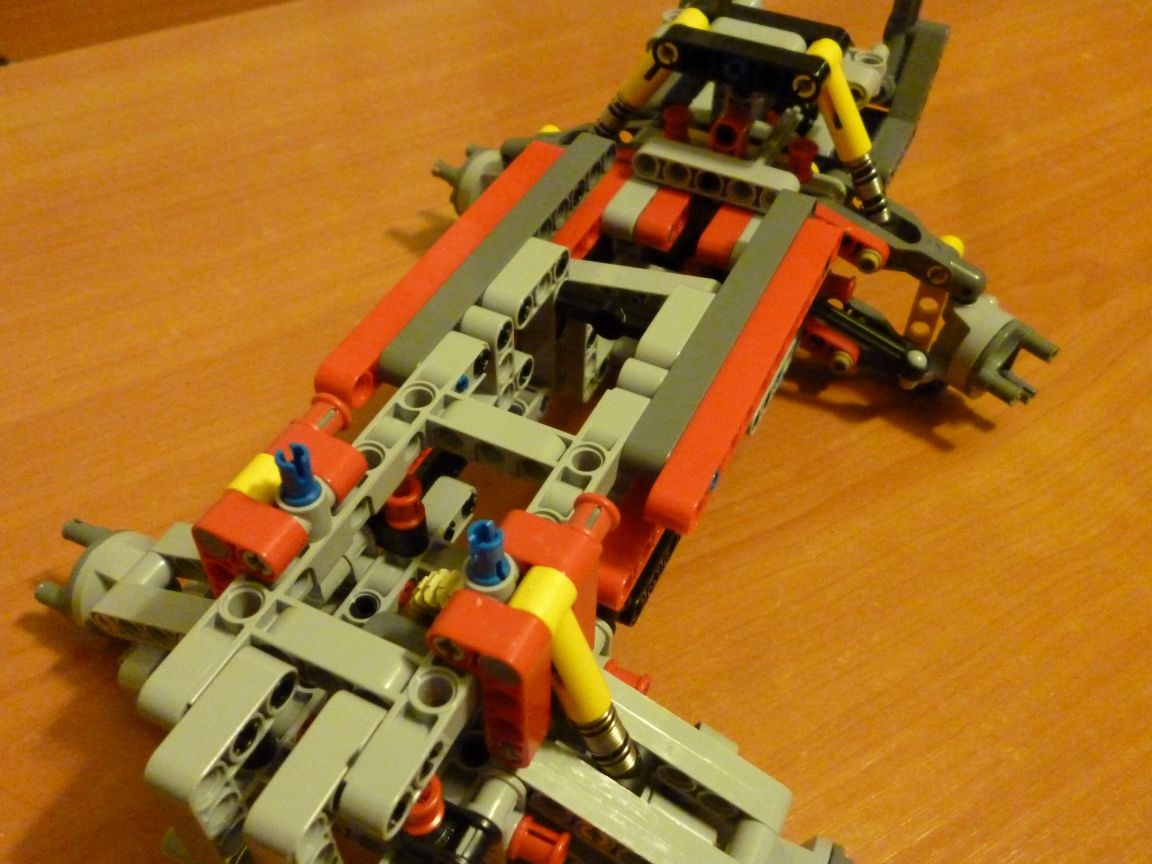
Συνδέουμε ολόκληρη τη δομή μας:
Βήμα 5 Καμπίνα
Η καμπίνα είναι προσωπικά αυτοσχεδιασμός μου, δεν υπάρχουν έτοιμες οδηγίες, οπότε πρέπει να συλλέξετε από φωτογραφίες.



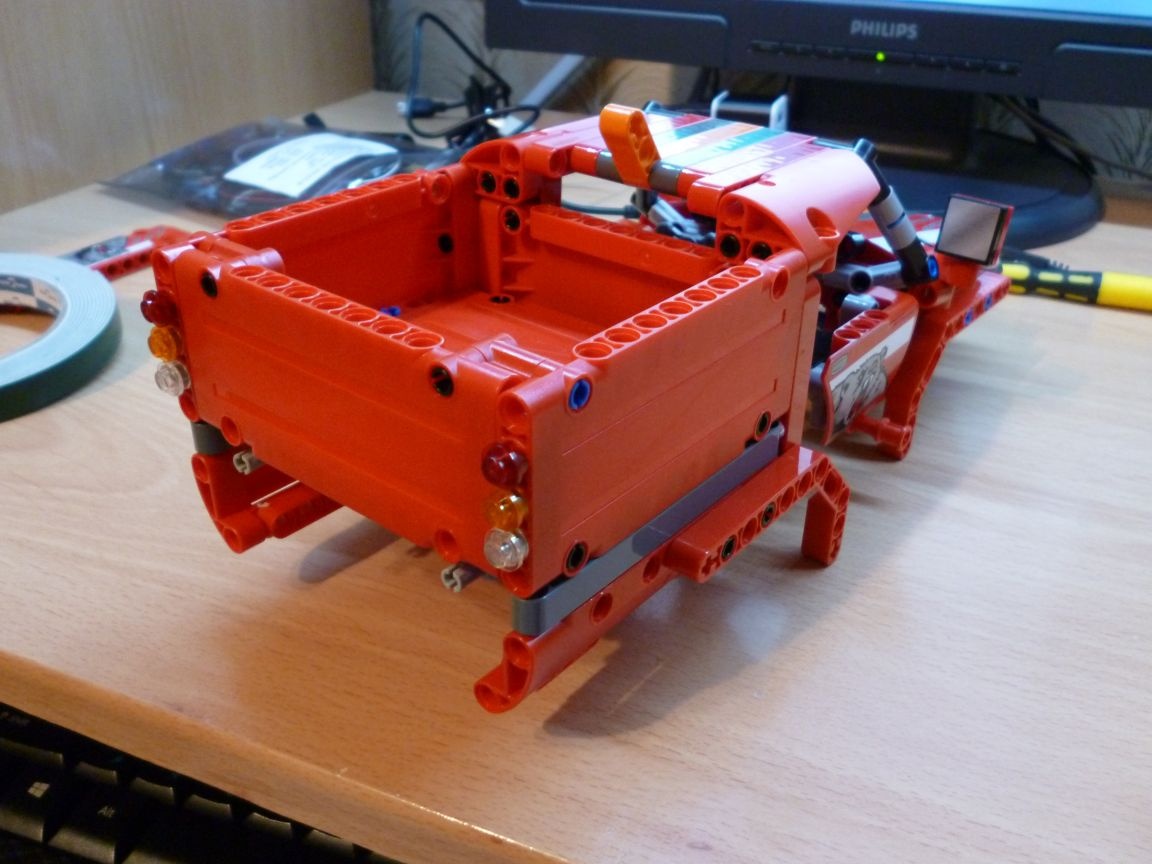
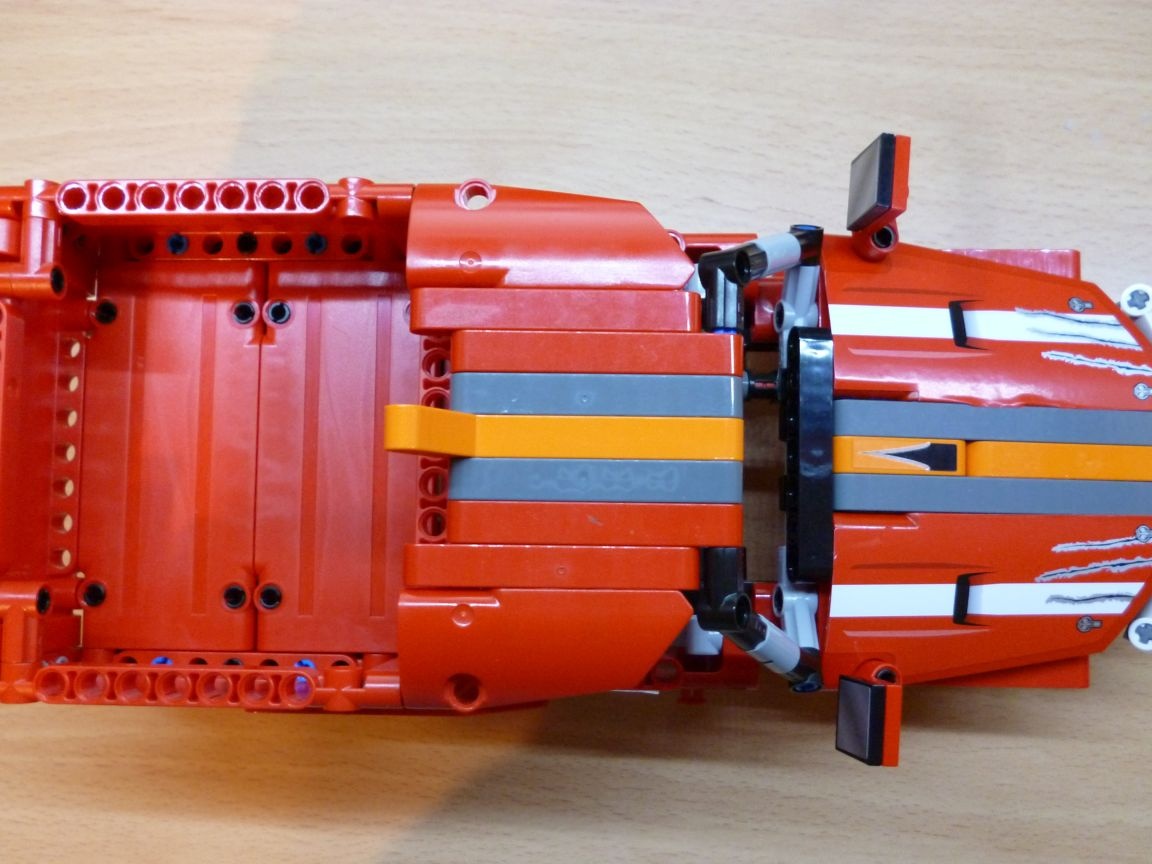
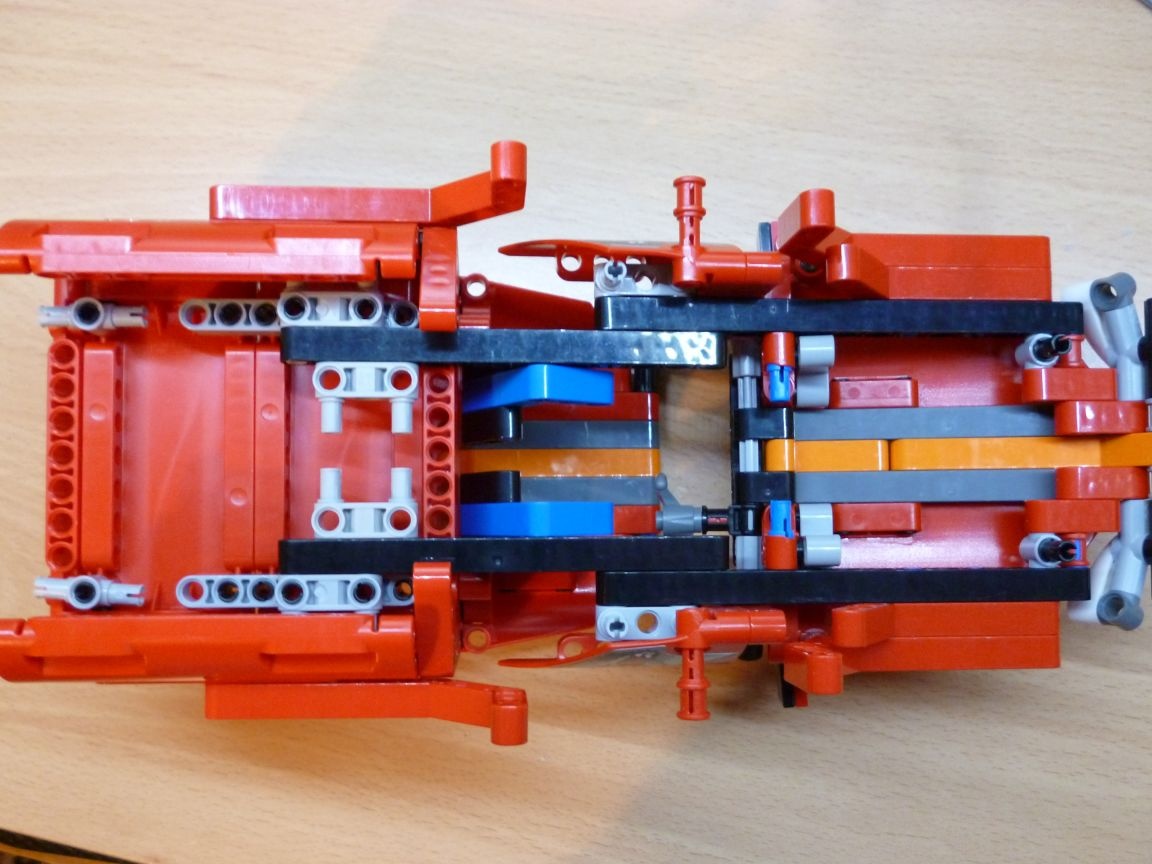
Μπορείτε να συναρμολογήσετε τη δική σας έκδοση, απλά πρέπει να την τοποθετήσετε κάτω από το πλαίσιο. Το κύριο πράγμα εδώ είναι να ταιριάζει με το στήριγμα με το πλαίσιο. Υπάρχουν τέσσερις από αυτές και είναι σαφώς ορατές στη φωτογραφία από το κάτω μέρος της καμπίνας.
Βήμα 6 υλικολογισμικού.
Σήμερα, όμως, όπως πάντα, προγραμματίζω στο IDE του Arduino. Πρώτα πρέπει να συμπληρώσετε το υλικολογισμικό μου και μέσω του τερματικού να δούμε τους κωδικούς τηλεχειρισμού που πρόκειται να χρησιμοποιήσετε. Μπορείτε να πάρετε οποιοδήποτε τηλεχειριστήριο IR, για παράδειγμα από μια τηλεόραση, DVD player ή να συναρμολογήσετε τη δική σας (έχω ένα σπιτικό τηλεχειριστήριο από το joystick της Sega). Πατώντας ένα κουμπί, στο τερματικό θα δείτε τον κωδικό του πατημένου πλήκτρου, γράψτε το σε ένα κομμάτι χαρτί. Το κάνουμε αυτό με όλα τα κουμπιά στα οποία θέλουμε να προγραμματίσουμε τις ενέργειες. Στη συνέχεια, επεξεργαστείτε το σκίτσο. Γράφουμε τους κωδικούς μας σε αυτό για τις απαραίτητες ενέργειες και αναβοσβήνουμε ξανά. Αυτό το υλικολογισμικό έχει ρυθμιστεί στο remote joystick μου. Κατά τη διαδικασία του παιχνιδιού με το μηχάνημα, παρατήρησα μερικές αποχρώσεις ή δυσκολίες. Είναι δύσκολο να επιτευχθεί αξιόπιστη λήψη IR εντολών κατά τη διάρκεια της κίνησης. Και συμβαίνει αυτό: πατήστε το βέλος προς τα εμπρός, το μηχάνημα έλαβε εντολή για να πάει και έσπευσε προς τα εμπρός, απελευθέρωσε το βέλος, αλλά δεν έλαβε εντολή διακοπής και συνεχίζει να οδηγεί μέχρι να συντρίψει ή να κολλήσει, είναι γεμάτο με βλάβες. Εν μέρει, το πρόβλημα αυτό μπορεί να λυθεί με την αύξηση του αριθμού των προσπαθειών αποστολής εντολής, ωστόσο αυτό είναι δυνατό μόνο όταν χρησιμοποιείτε μόνοι σας το τηλεχειριστήριο. Αλλά θα επιλέξω μια πιο καρνική λύση - θα στραφώ στη χρήση ενός πομπού-δέκτη 433MHz. Θα γράψω γι 'αυτό στο επόμενο άρθρο.
Βήμα 7 τοποθετείται σε τροχούς.
Πρέπει λοιπόν να βάλουμε την καμπίνα στο σασί, να βάλουμε τους τροχούς και να ελέγξουμε το SUV σε δράση.

