


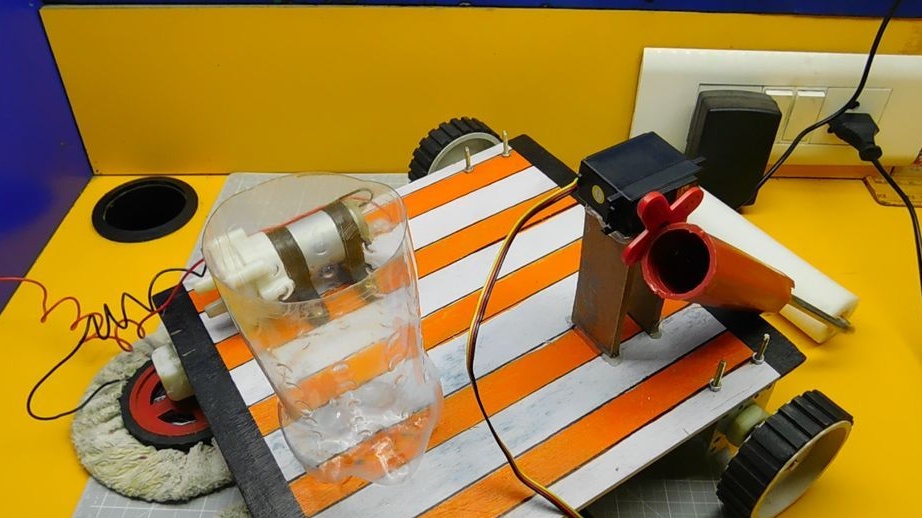
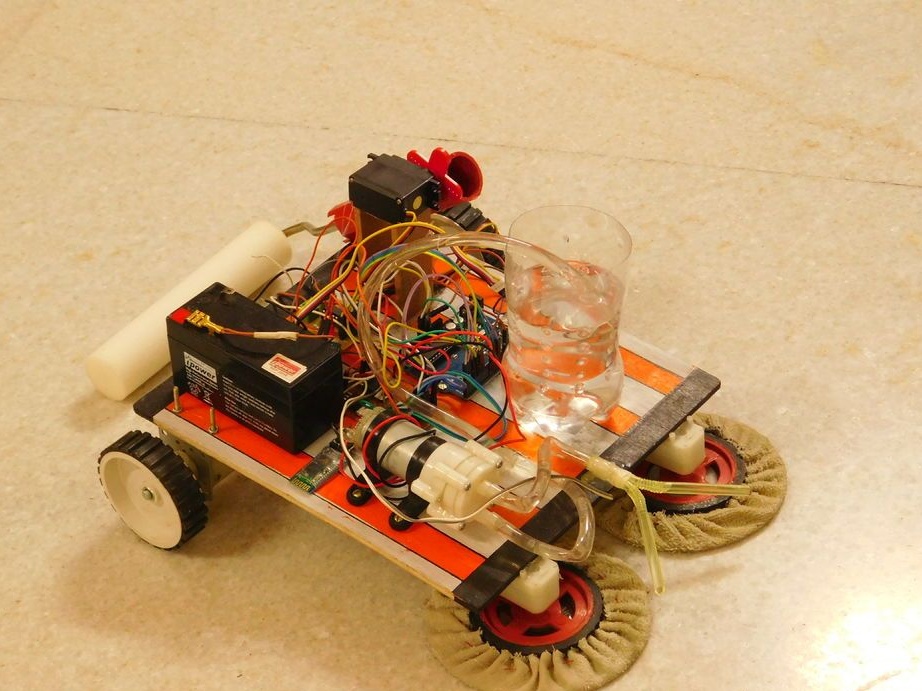
Το ρομπότΟ συλλέκτης έχει στο οπλοστάσιό του δύο περιστρεφόμενες βούρτσες τοποθετημένες στο μπροστινό μέρος του άξονα του ηλεκτρομειωτήρα. Το κιβώτιο ταχυτήτων περιστρέφεται με ταχύτητα 75 σ.α.λ. Το ρομπότ διαθέτει δεξαμενή νερού επί του σκάφους. Ένας κύλινδρος είναι τοποθετημένος στο πίσω μέρος του ρομπότ. Το ρομπότ αναμιγνύεται με τη βοήθεια τροχών που είναι στερεωμένοι στον άξονα του ηλεκτρομειωτήρα. Το καθαριστικό ελέγχεται από το smartphone μέσω bluetooth. Στο μέλλον ο πλοίαρχος σχεδιάζει να κάνει το ρομπότ αυτόνομο. Ας δούμε πώς λειτουργεί αυτή η συσκευή.
Εργαλεία και υλικά:
-Είσοδος κινητήρα 100 σ.α.λ.-2 τεμάχια.
-Οι τροχοί για τον κινητήρα -2 τεμάχια.
-Διακόπτης κινητήρα με τροχό 75 σ.α.λ. - 2 τεμάχια.
-Arduino UNO;
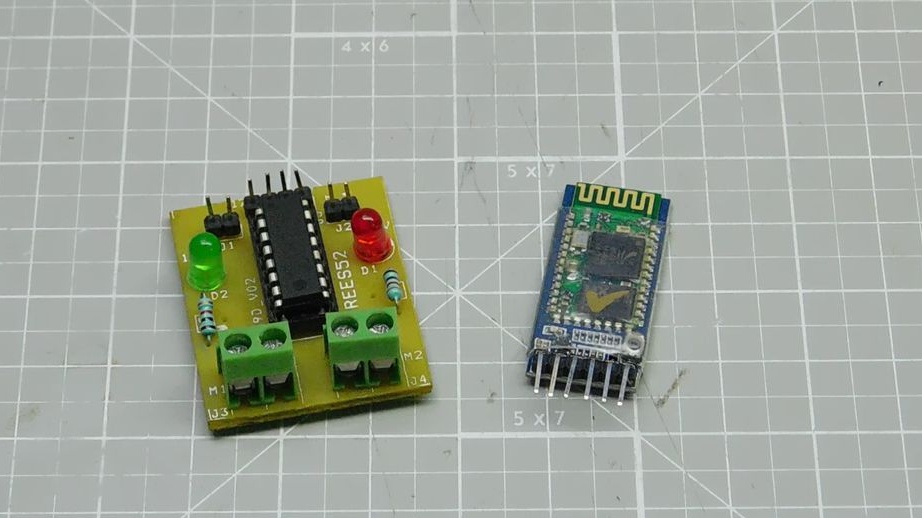
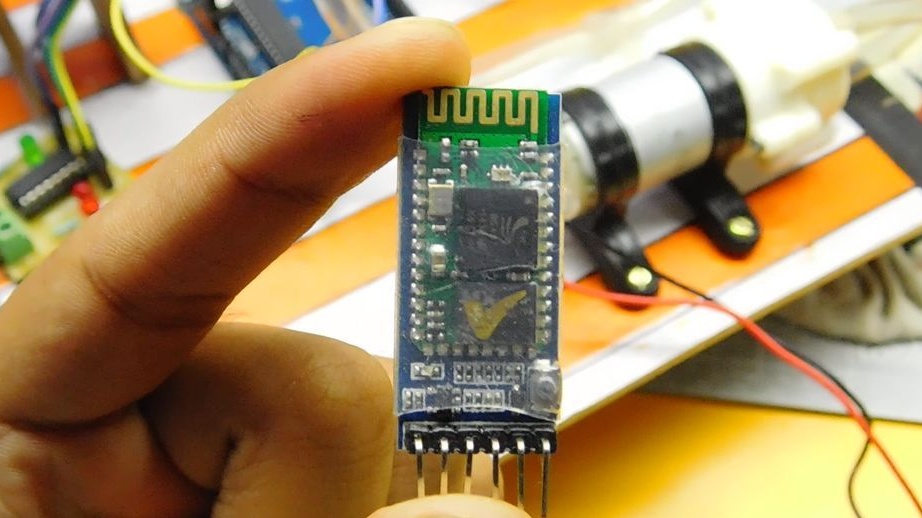
- Μονάδα Bluetooth HC-05/06.
-Driver L293D;
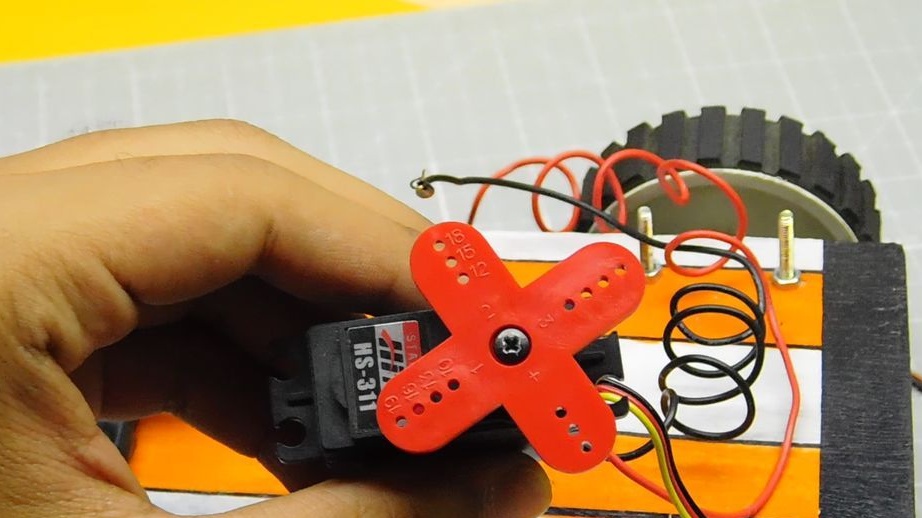
- Σερβοκινητήρας (περιστροφή 180 μοιρών).
-12V μπαταρία.
- Αντλία 12 V.
Τρανζίστορ TIP31C;
Τρανζίστορ TIP122;
- Μονάδα CD - 2 τεμ.
- κύλινδρος βαφής,
- Σακούλες από ύφασμα.
- Βελόνα με νήμα.
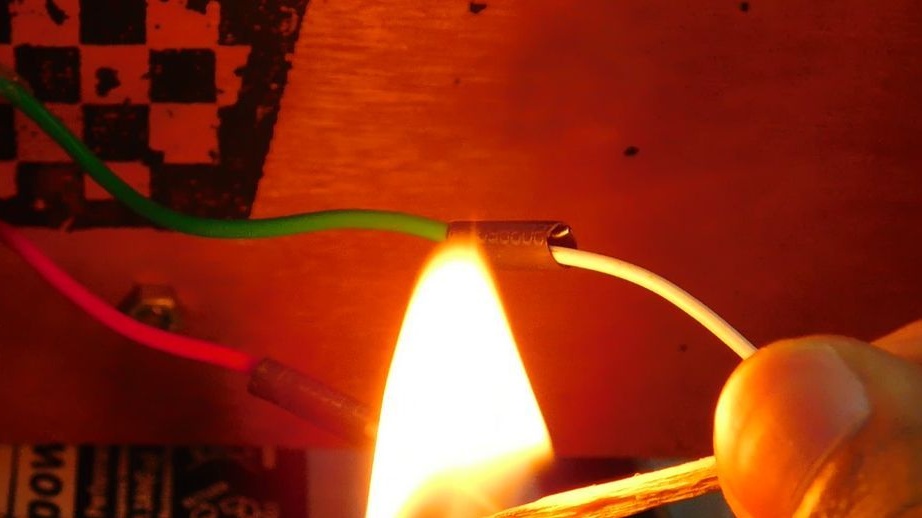
-Tube.
-Wire;
- Jumpers.
-Πίνακα τοποθέτησης.
-Συνδέσεις.
-Plywood;
-Πλαστική φιάλη.
-Σολλητικό σίδερο.
-Περιέρα κόλλας.
-Drill;
- Πένσες.
-Dremel;
- βούρτσα.
-Χρώμα.
-Μαρκετ?
- ψαλίδι ·











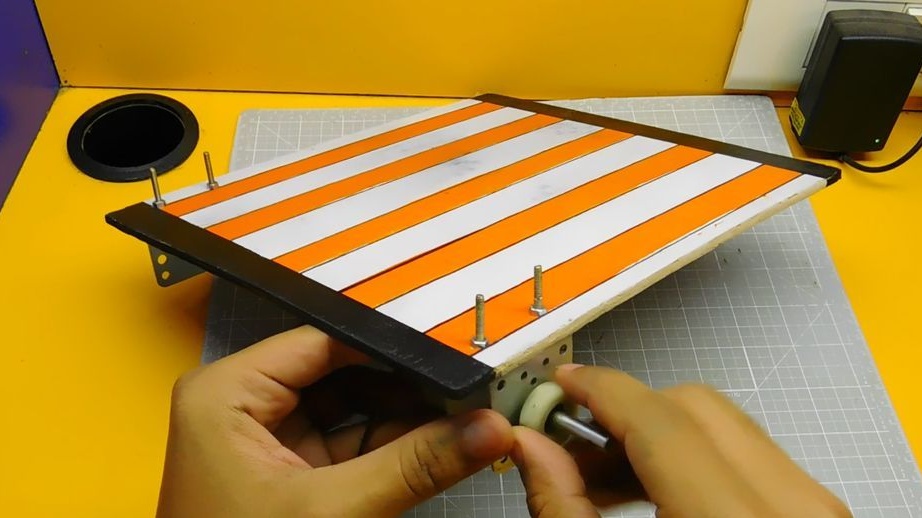
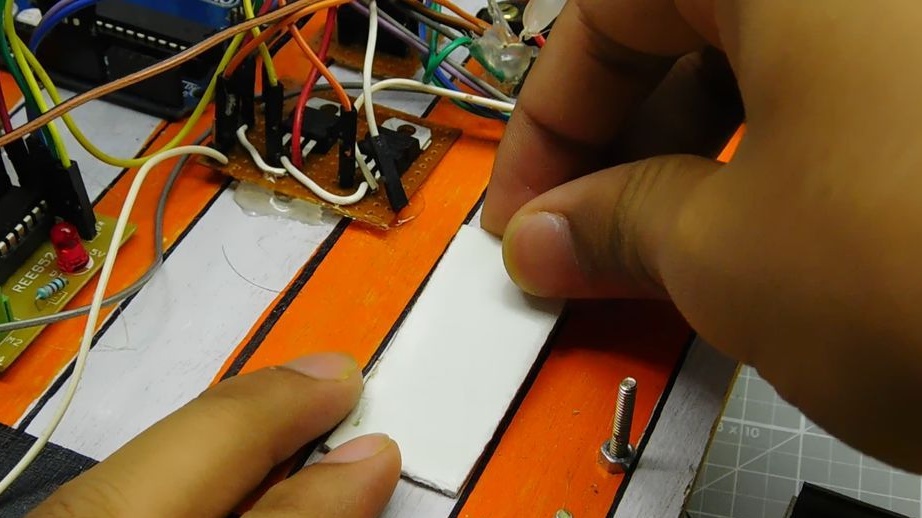
Βήμα πρώτο: Ίδρυμα
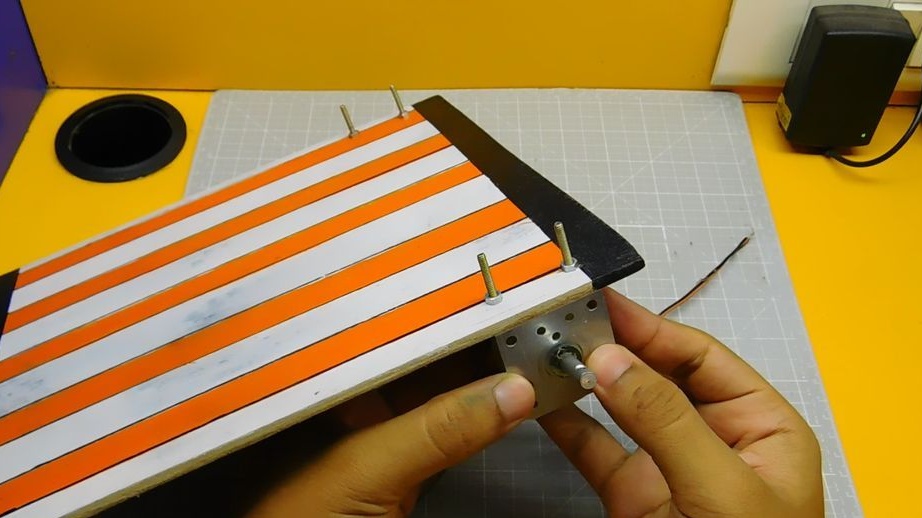
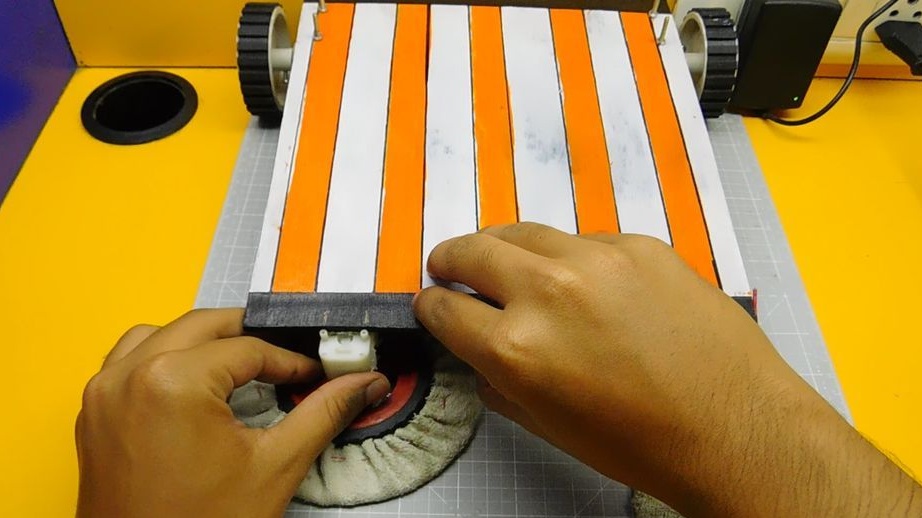
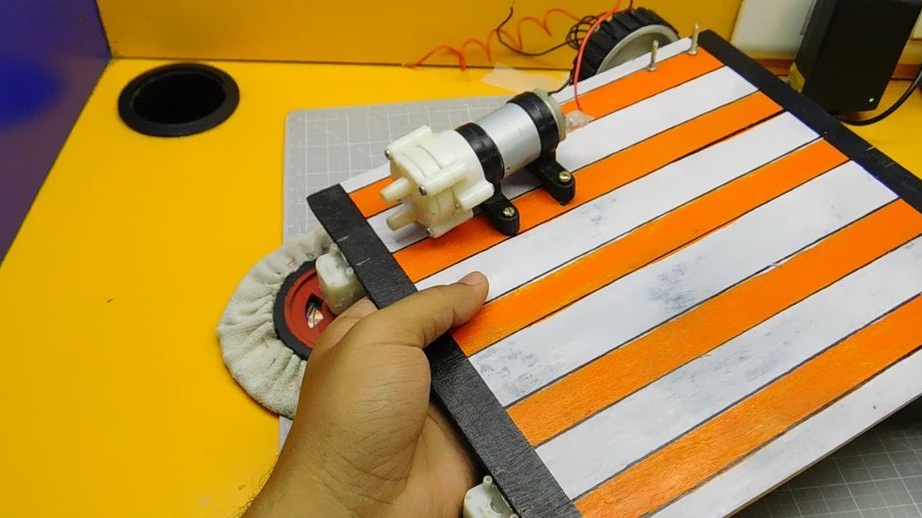
Από κόντρα πλακέ κόβει τη βάση. Τα μεγέθη της βάσης είναι 30 * 22 εκ. Χρωματίζει τη βάση. Από τη μία πλευρά, στερεώνει τον κινητήρα του γραναζιού. Τοποθετεί ομοαξονικά τον κινητήρα του γραναζιού στην άλλη πλευρά της βάσης.



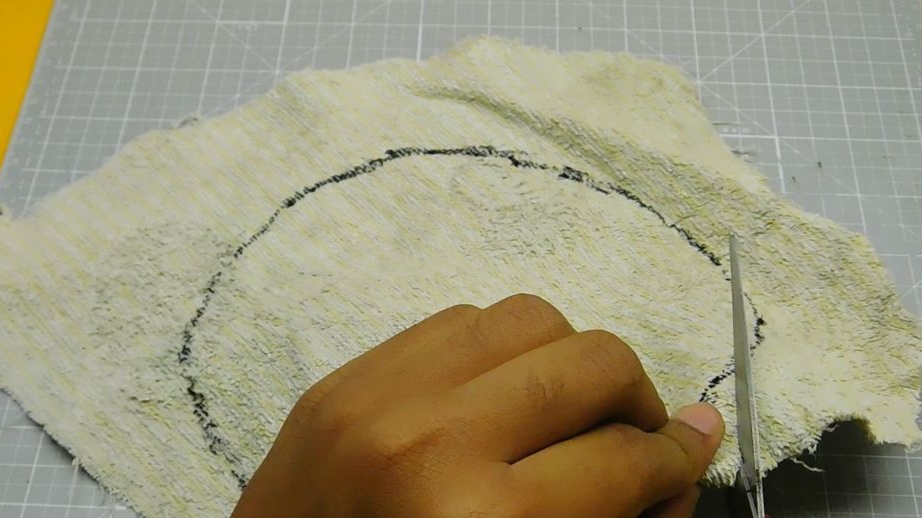
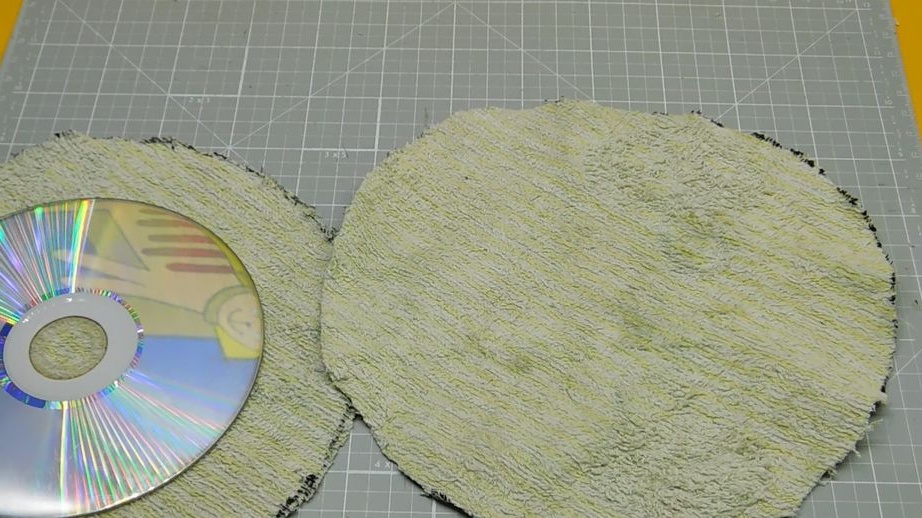
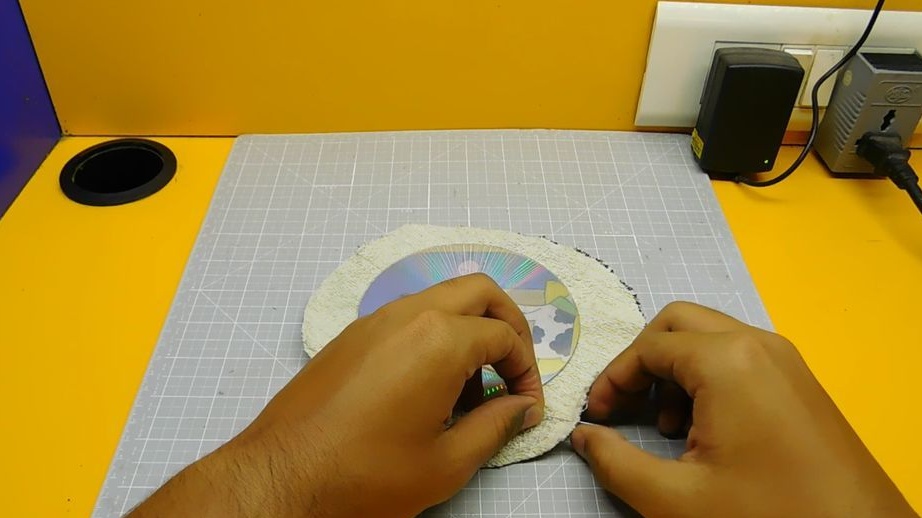
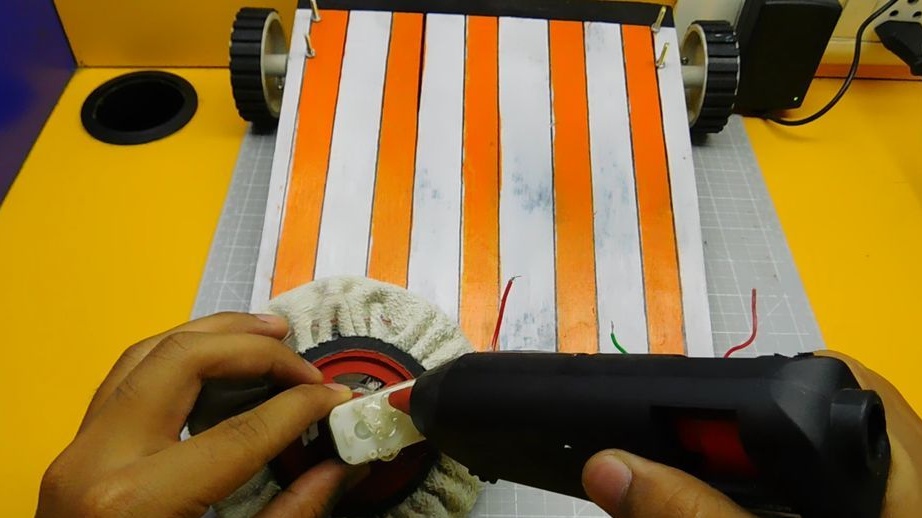
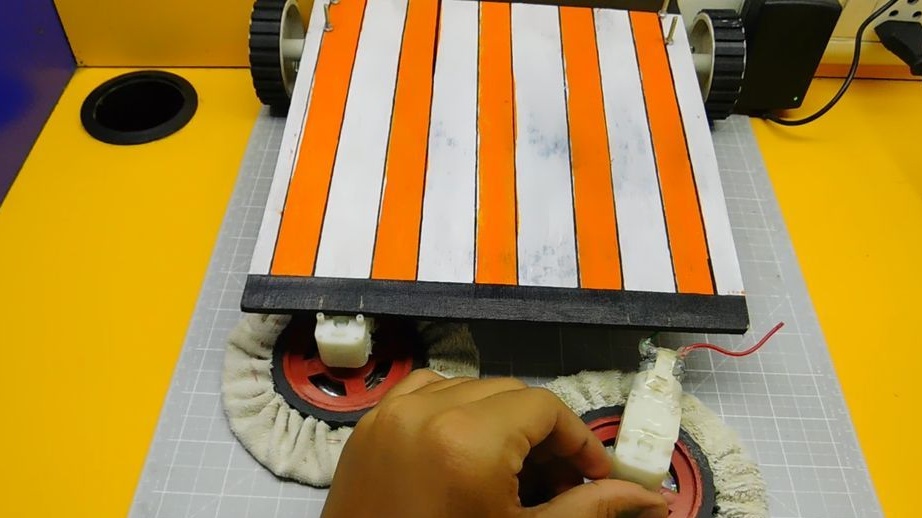
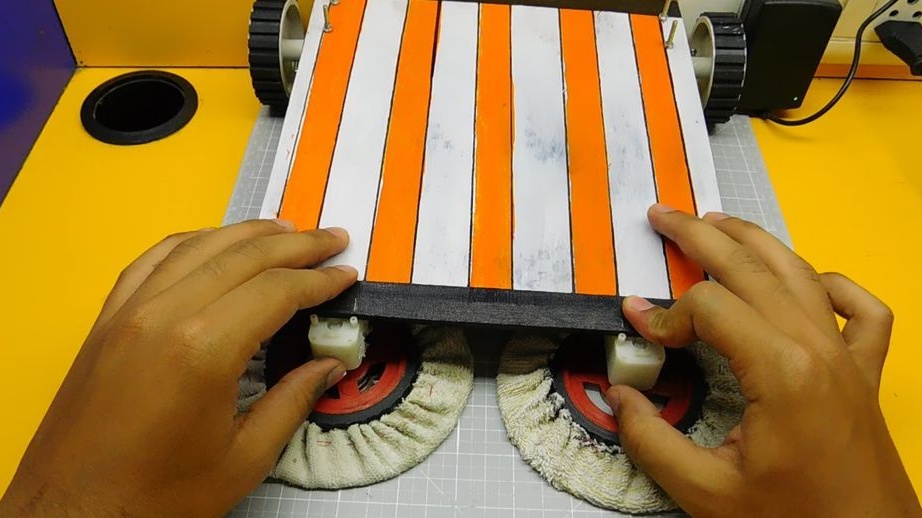
Βήμα δεύτερο: Βούρτσες
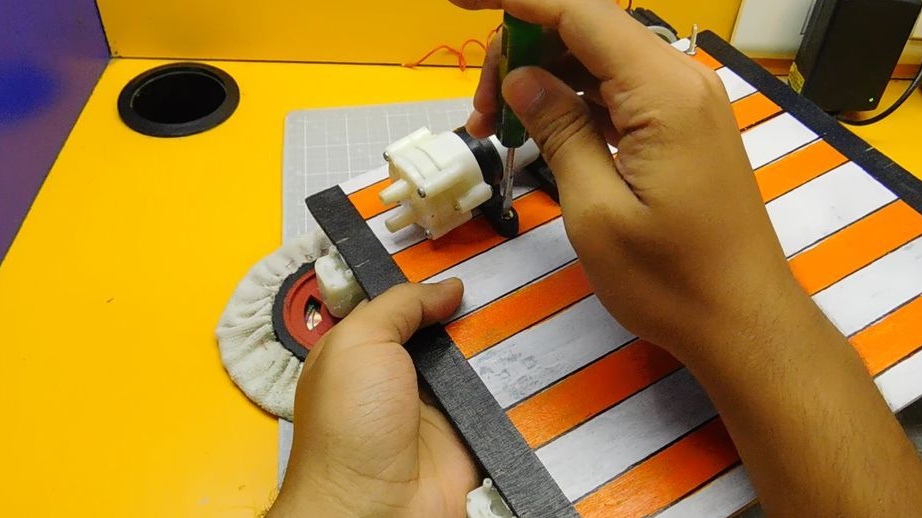
Ο πλοίαρχος έκανε πινέλα από παλιά CD. Κόψτε ένα κουρέλι. Επέστρεψαν το αυτοκίνητό της. Επαναλαμβανόμενη λειτουργία με άλλο δίσκο. Βεβαιωθείτε ότι οι δίσκοι έχουν κολληθεί με θερμή τήξη στον τροχό του ηλεκτρομειωτήρα. Ασφαλίστε και τους δύο κινητήρες γραναζιών μπροστά από την πλατφόρμα.








Βήμα δεύτερο: παροχή νερού
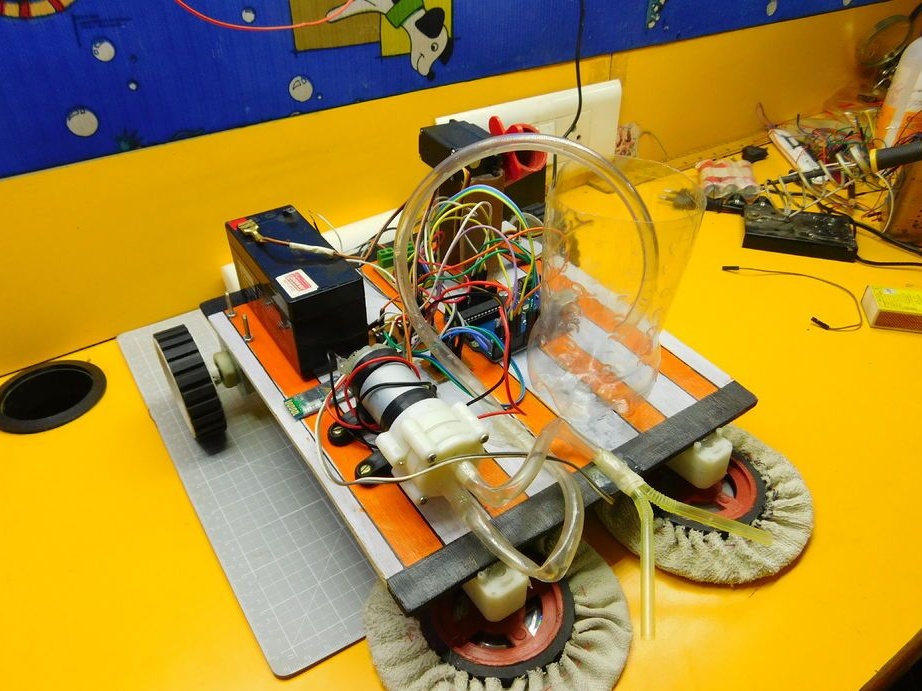
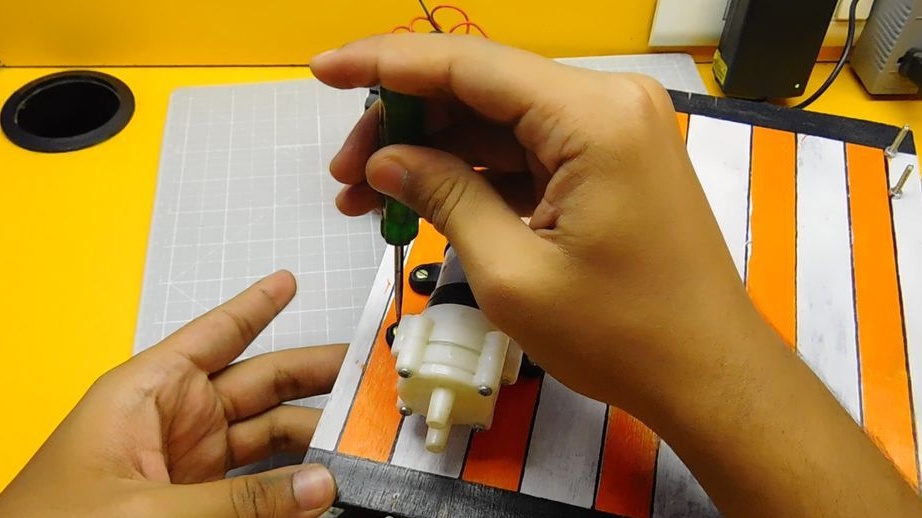
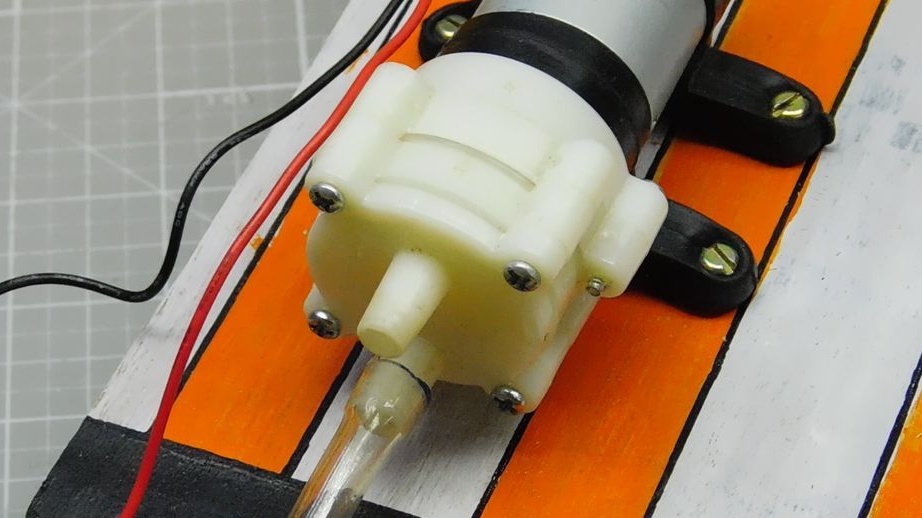
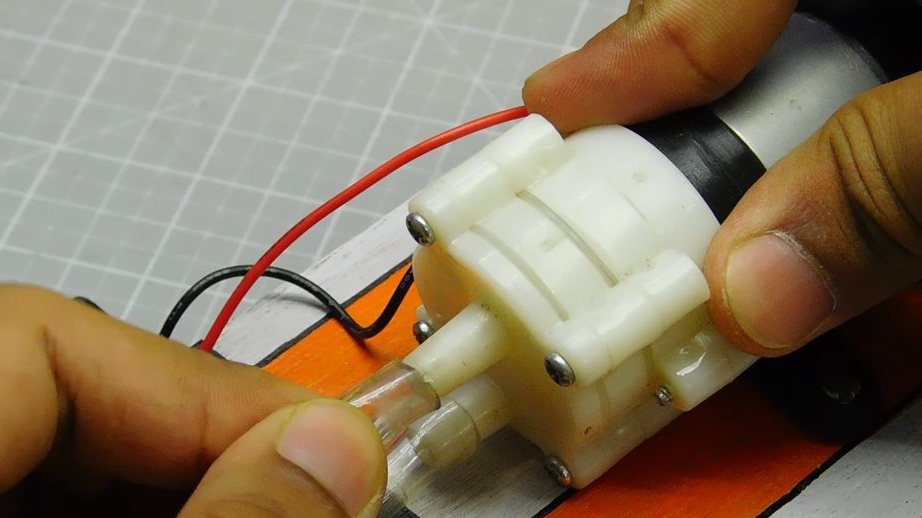
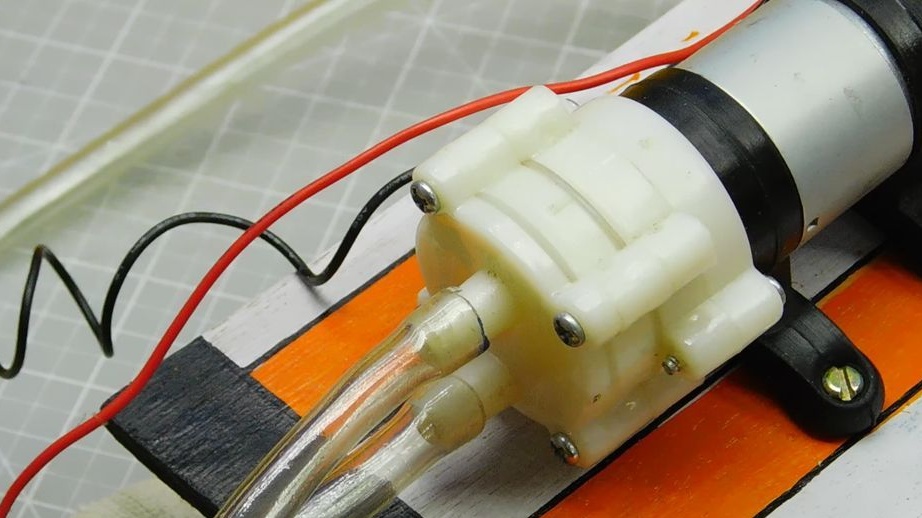
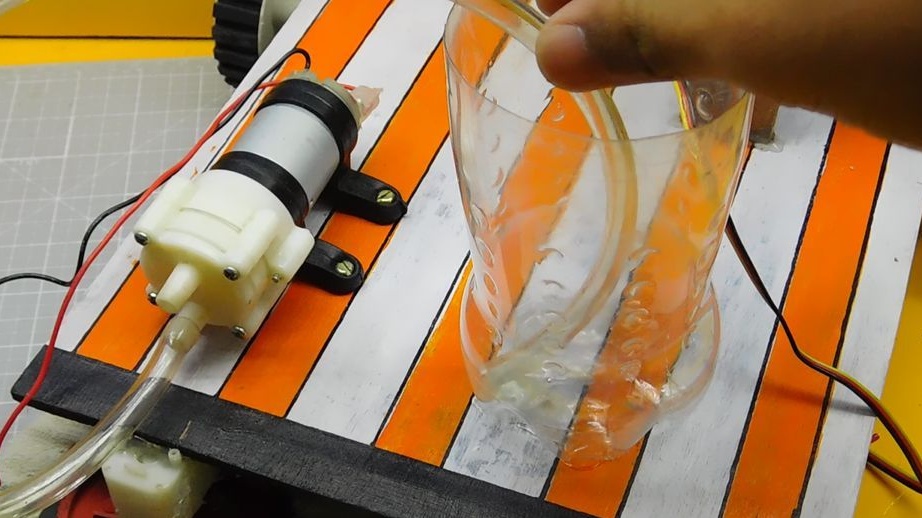
Ασφαλίζει την αντλία στην πλατφόρμα. Κόβει την κορυφή μιας πλαστικής φιάλης. Ασφαλίζει τη φιάλη στην πλατφόρμα. Εγκαθιστά ένα σωλήνα εισαγωγής νερού. Αργότερα, ο σωλήνας παροχής νερού στις βούρτσες θα σταθεροποιηθεί.








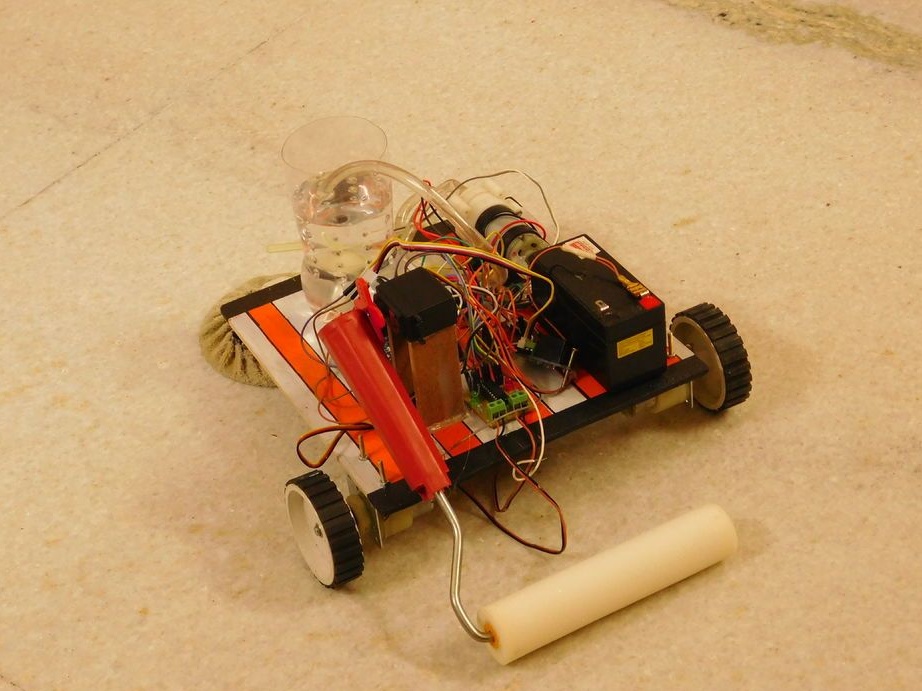
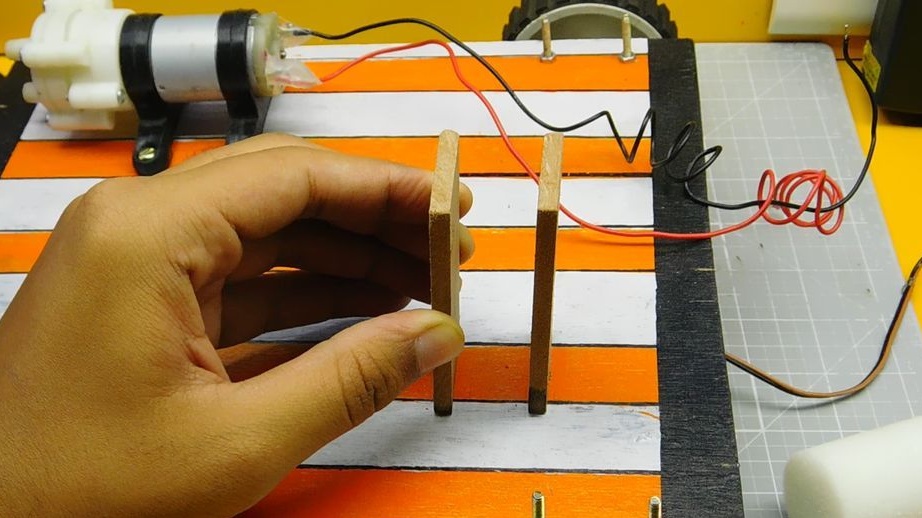
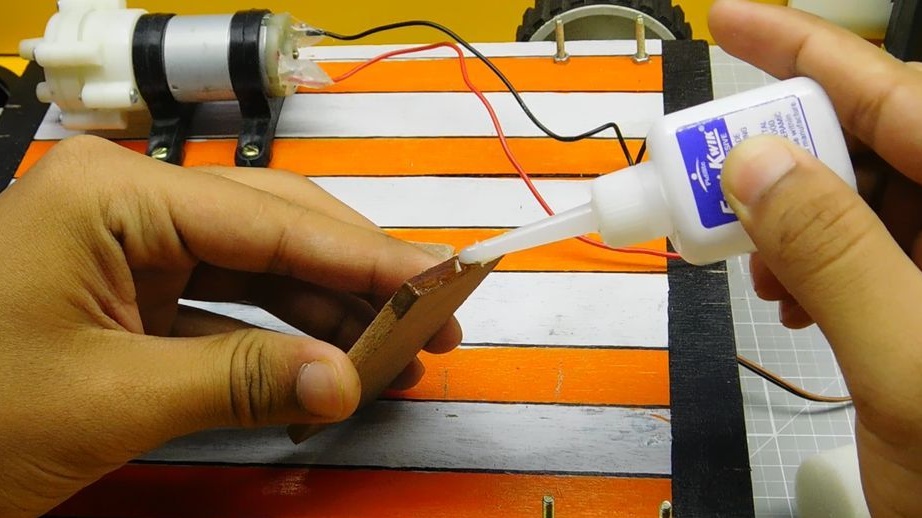
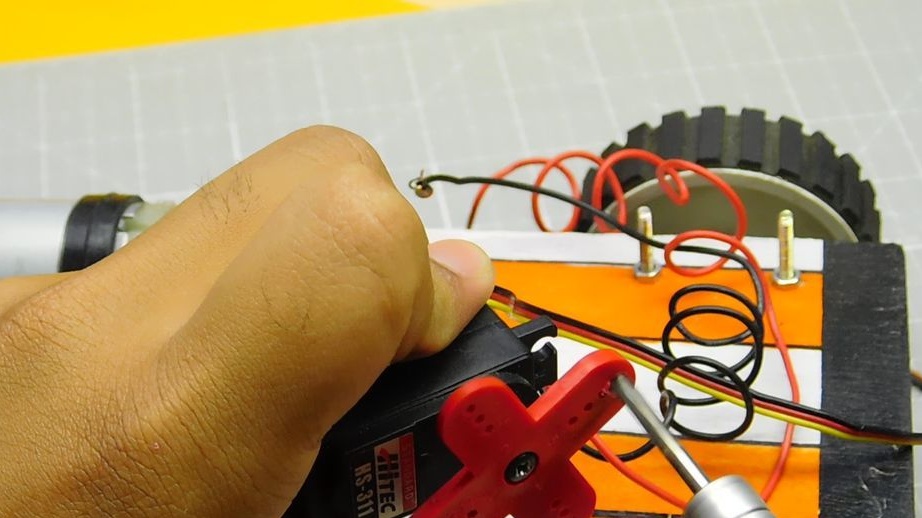
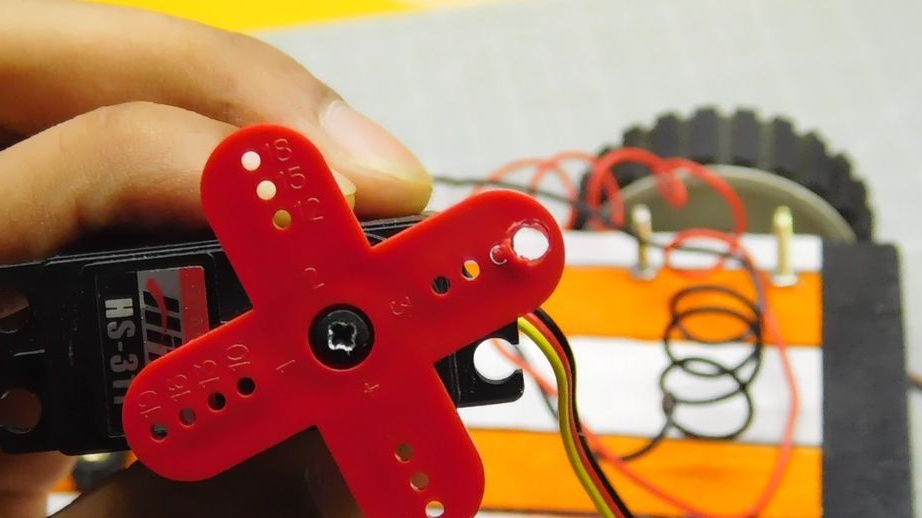
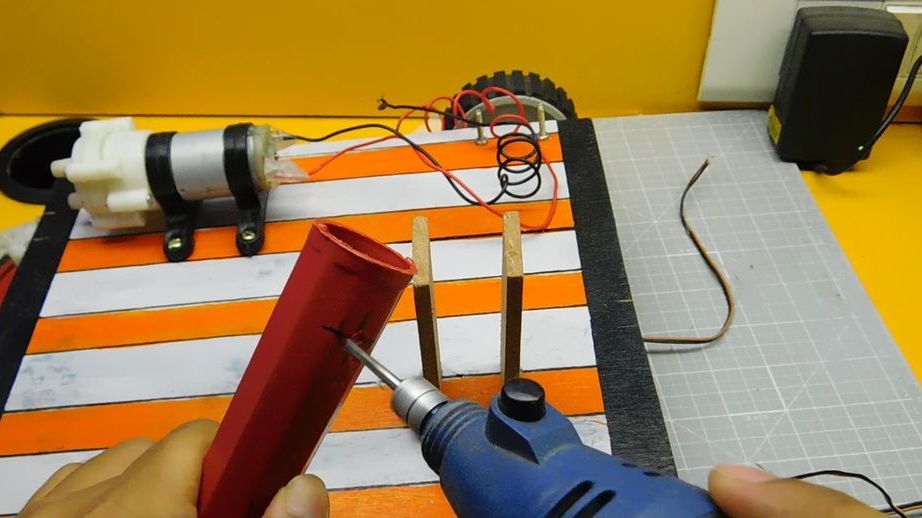
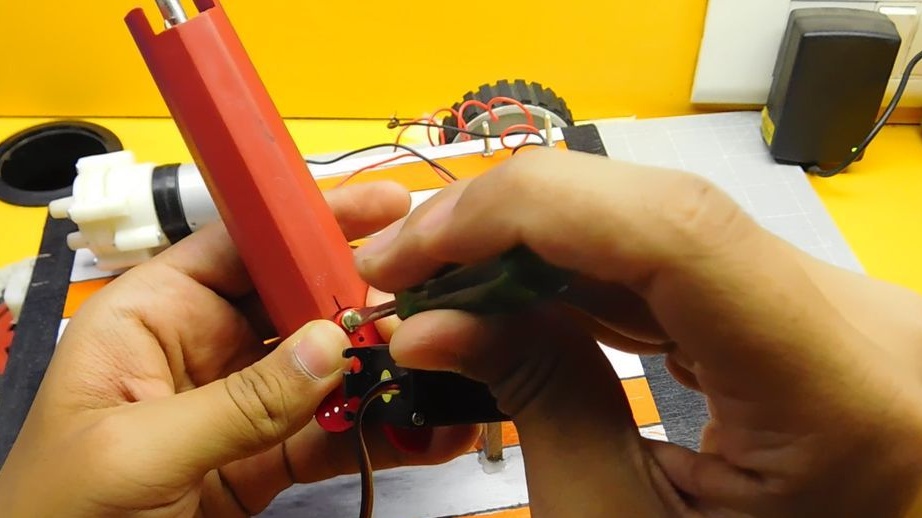
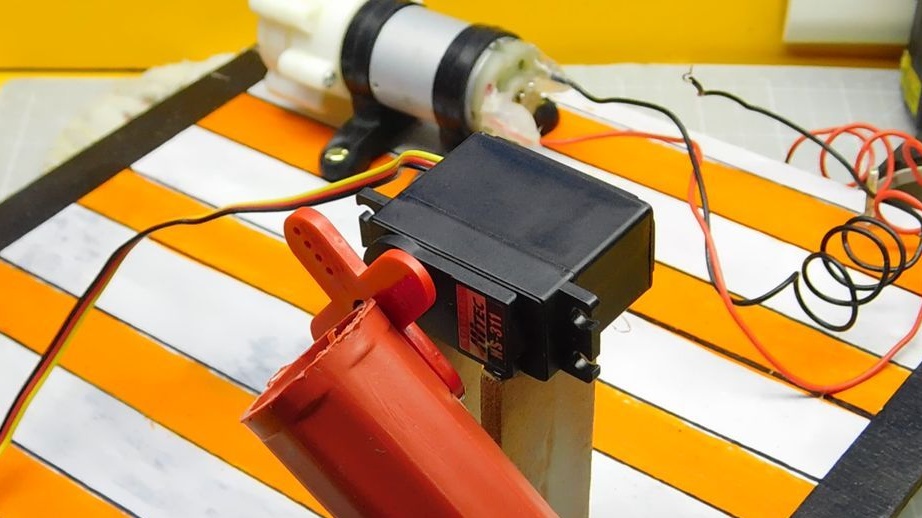
Βήμα τρίτο: Μηχανισμός ανύψωσης κυλίνδρων
Το έργο του κυλίνδρου είναι να συλλέγει λεπτή σκόνη. Δεδομένου ότι ο κύλινδρος είναι περιστασιακά απαραίτητος, ο πλοίαρχος αποφάσισε να δημιουργήσει ένα μηχανισμό ανύψωσης και χαμηλώματος του κυλίνδρου. Διορθώνει δύο παράλληλες πλάκες στην πλατφόρμα. Κάνει δύο τρύπες, μία στο μοχλό σέρβο, η δεύτερη στη λαβή του κυλίνδρου. Βιδώνει τη λαβή του κυλίνδρου στον μοχλό. Ασφαλίζει το σερβο στις ράγες.


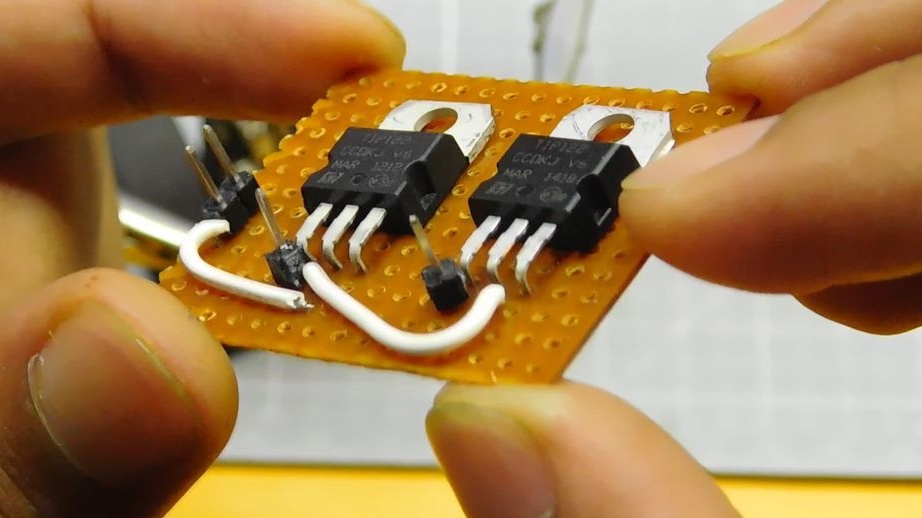
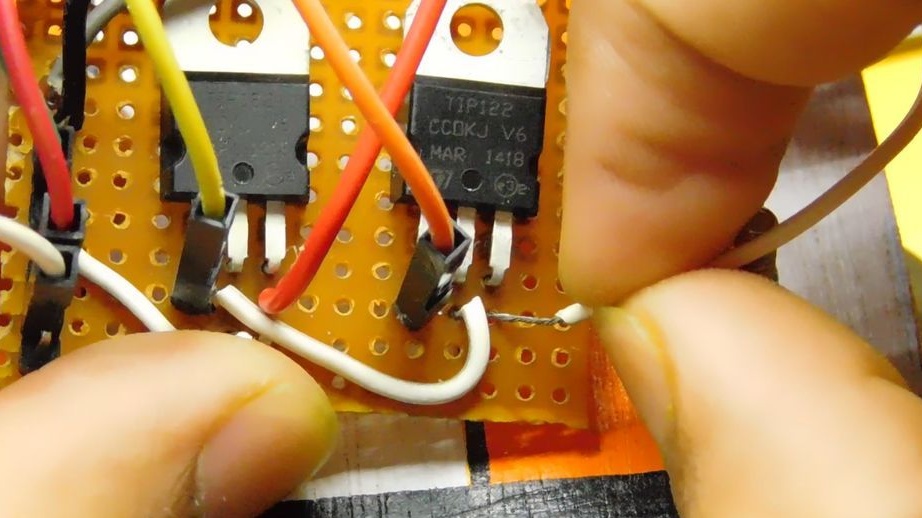
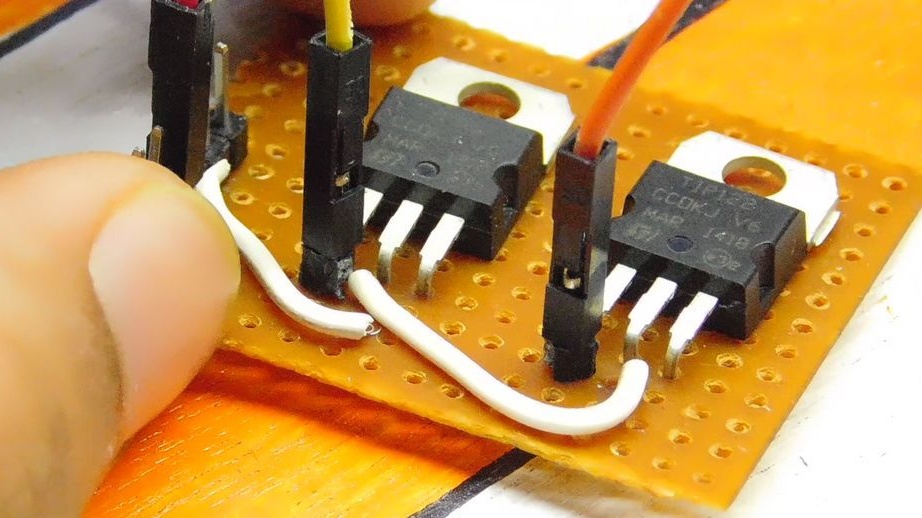
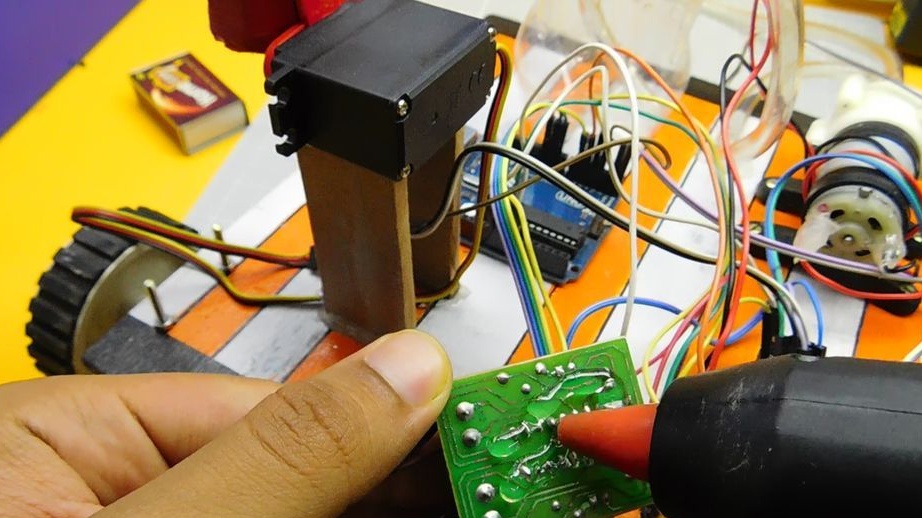
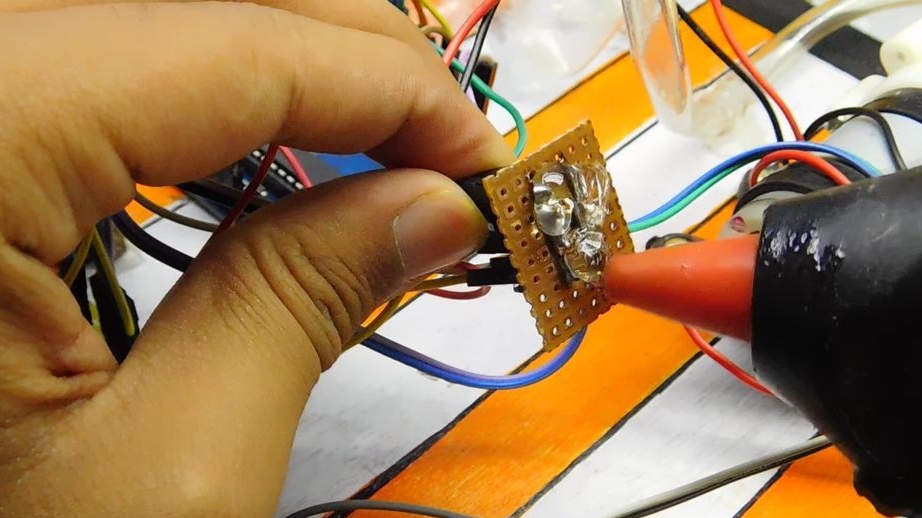
Βήμα τέσσερα: Τρανζίστορ
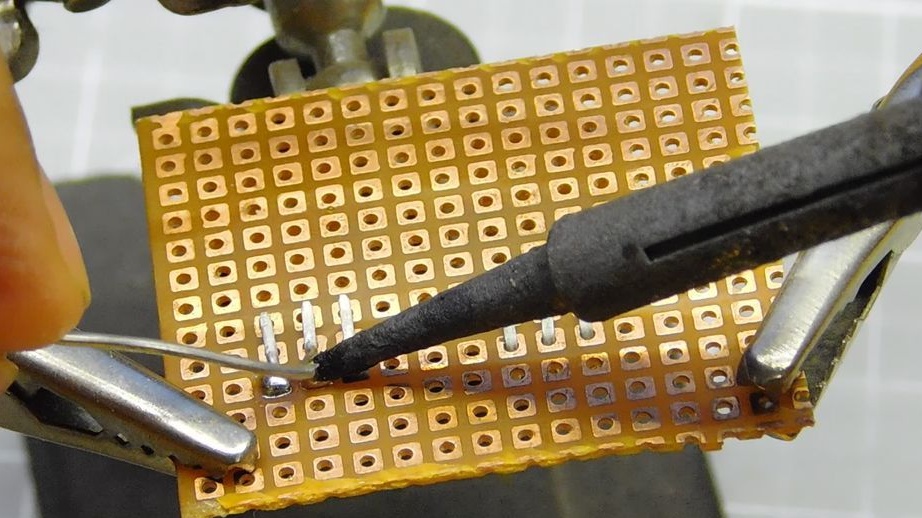
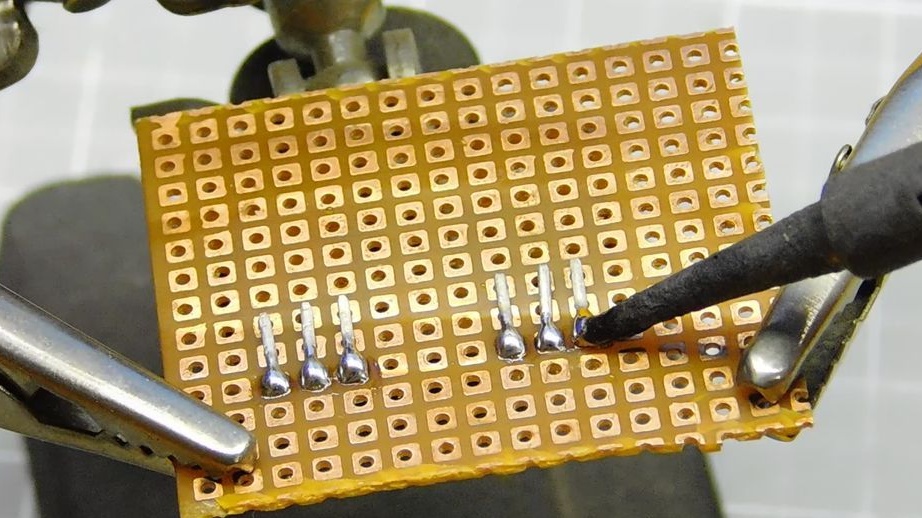
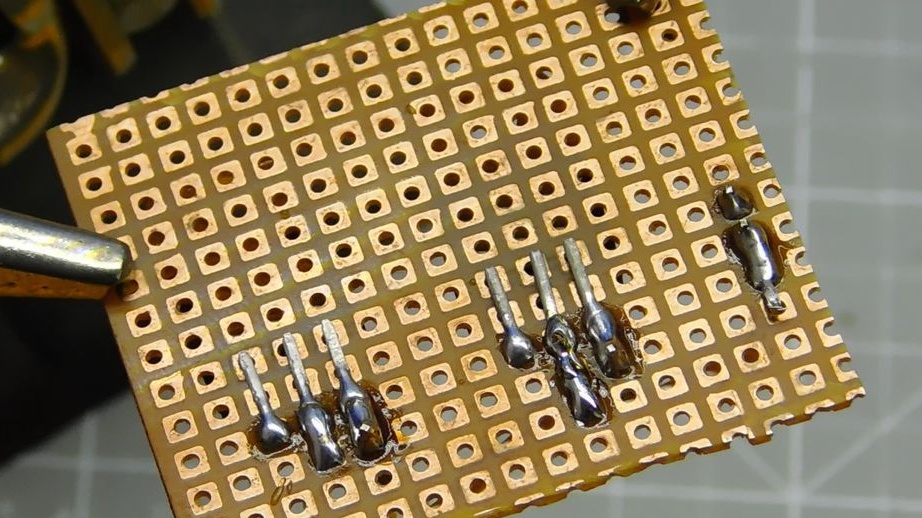
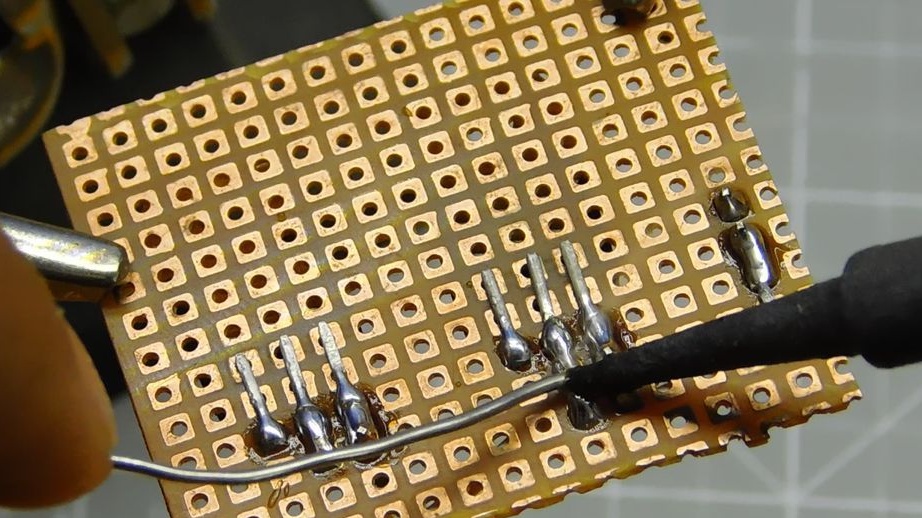
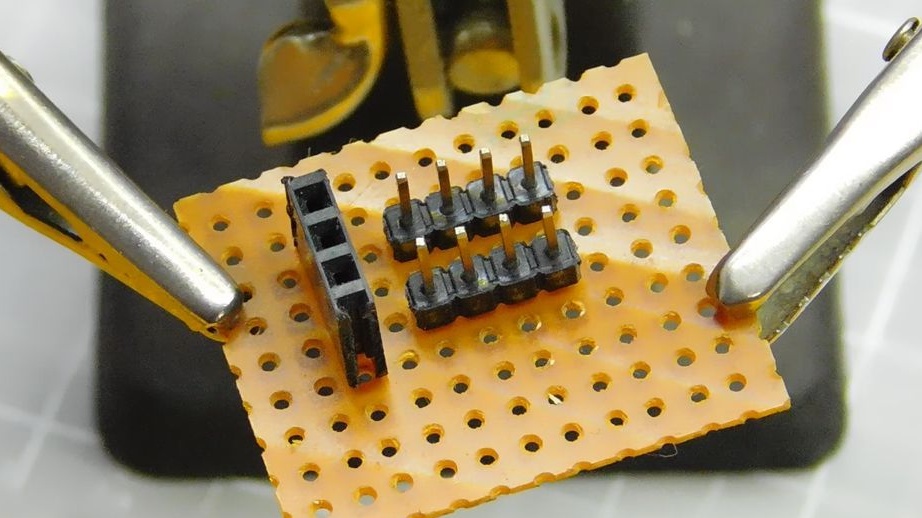
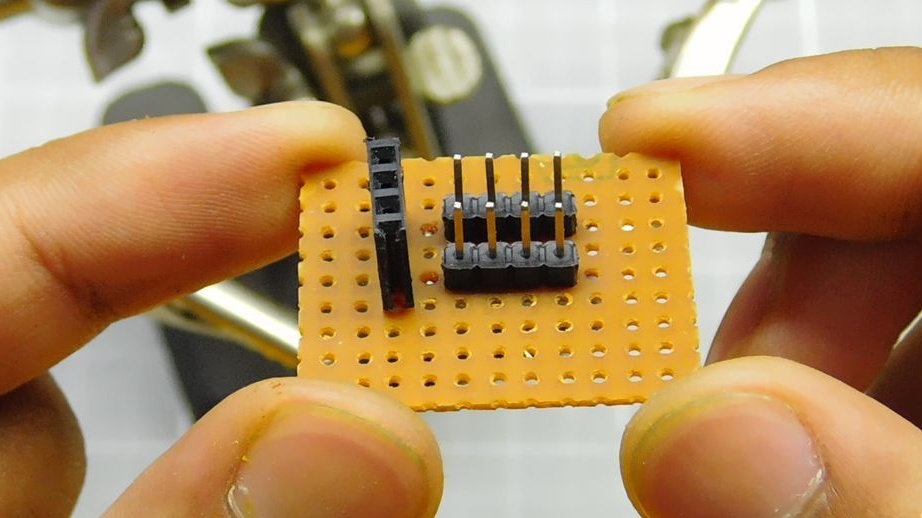
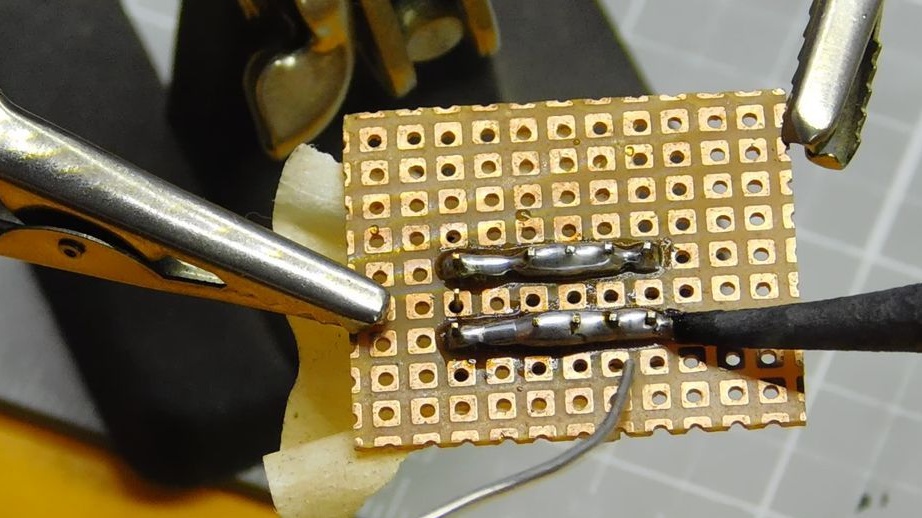
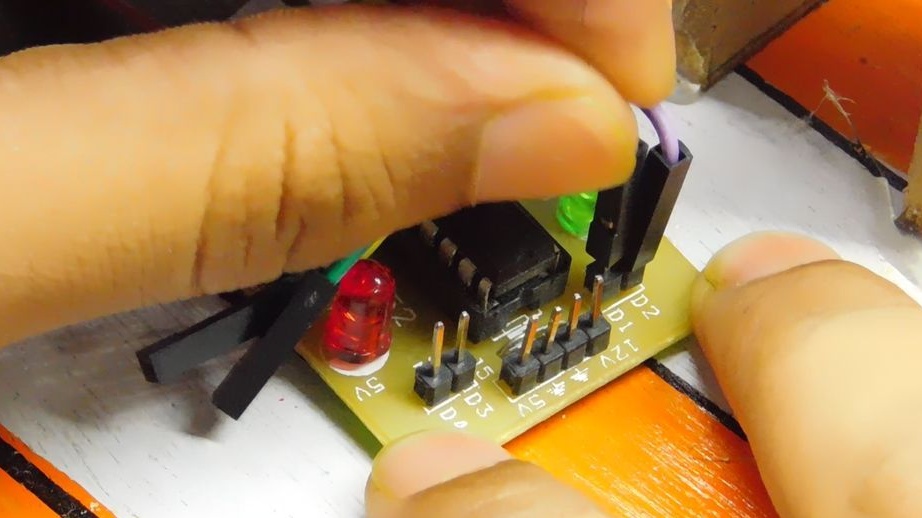
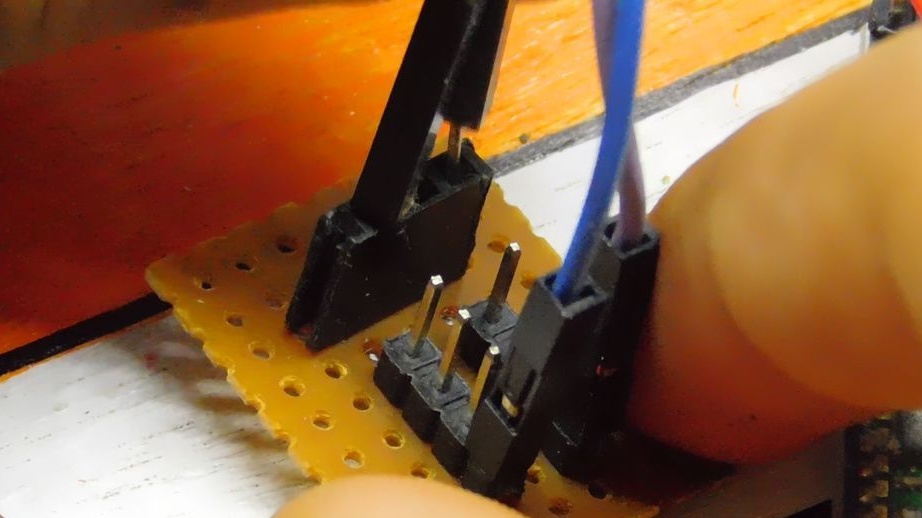
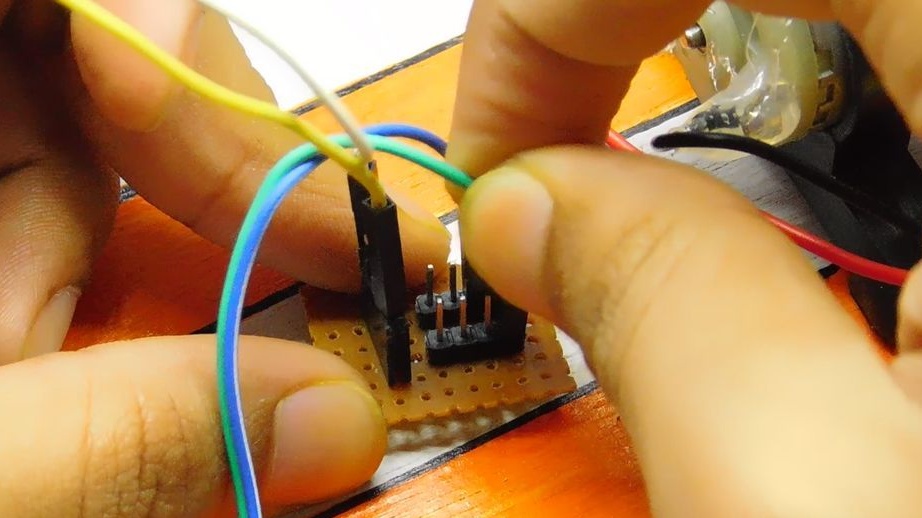
Για μια αντλία νερού και κινητήρες απαιτείται ισχύς 12 V. Αλλά, δεδομένου ότι ο Arduino δίνει μόνο 5 V, ο πλοίαρχος συγκεντρώνει το κύκλωμα στο τρανζίστορ TIP122.Επίσης, ο οδηγός προσθέτει αρκετούς ακροδέκτες + 5V και Gnd στην πλακέτα κυκλώματος.
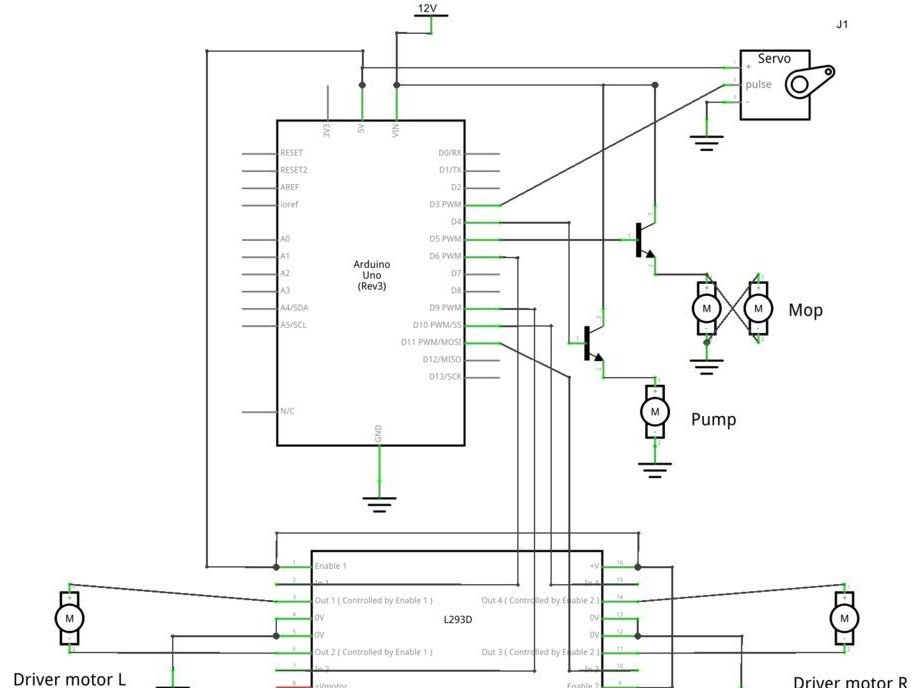
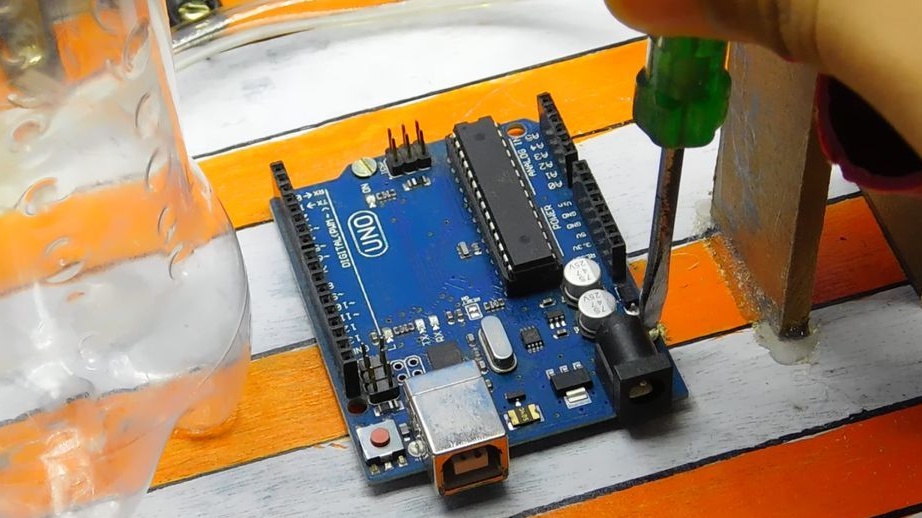
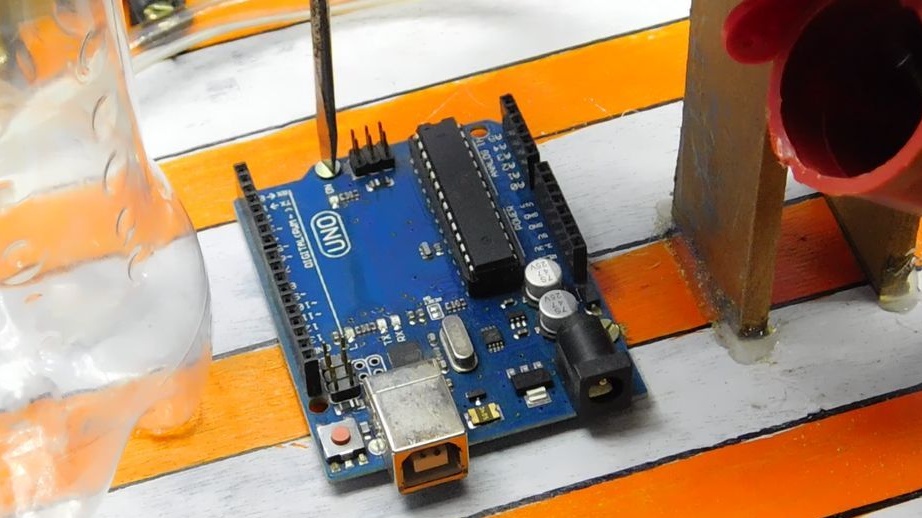
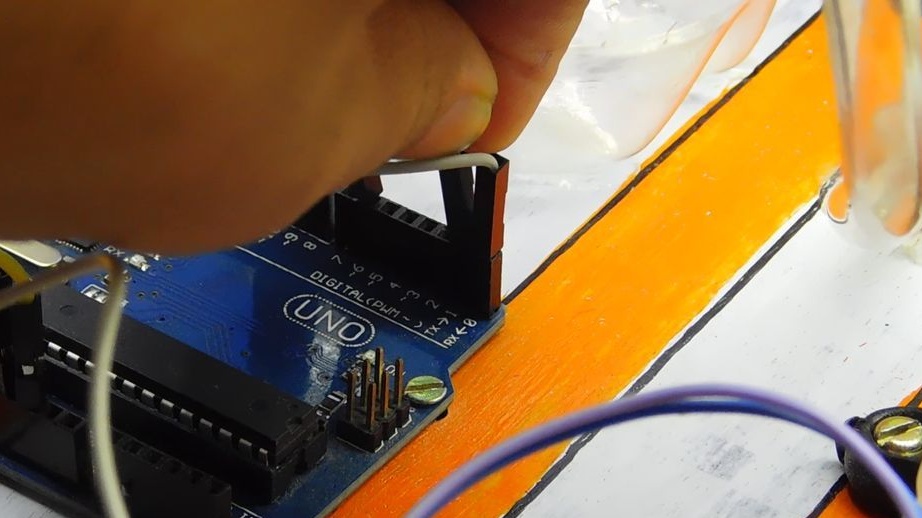
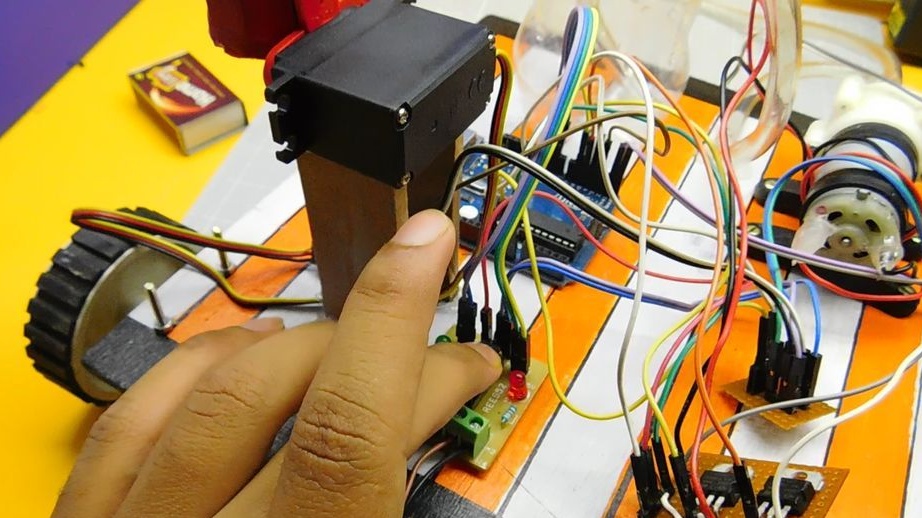
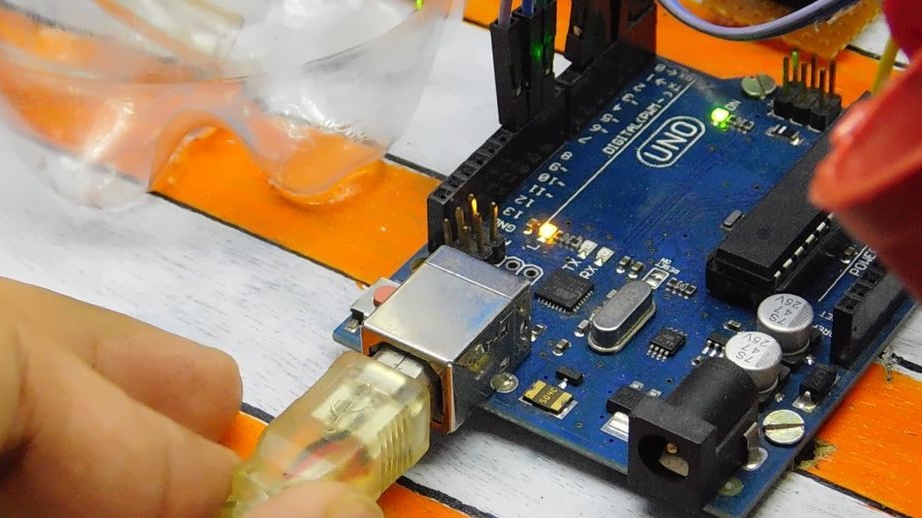
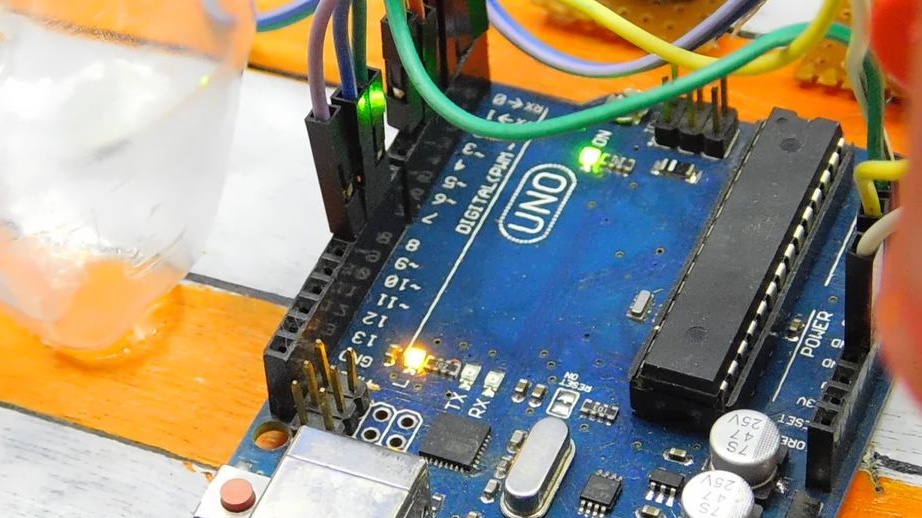
Βήμα πέντε: Εγκατάσταση του κυκλώματος Arduino
Ασφαλίζει το Arduino στην πλατφόρμα και συνδέει τις ηλεκτρικές συσκευές με το σκάφος.
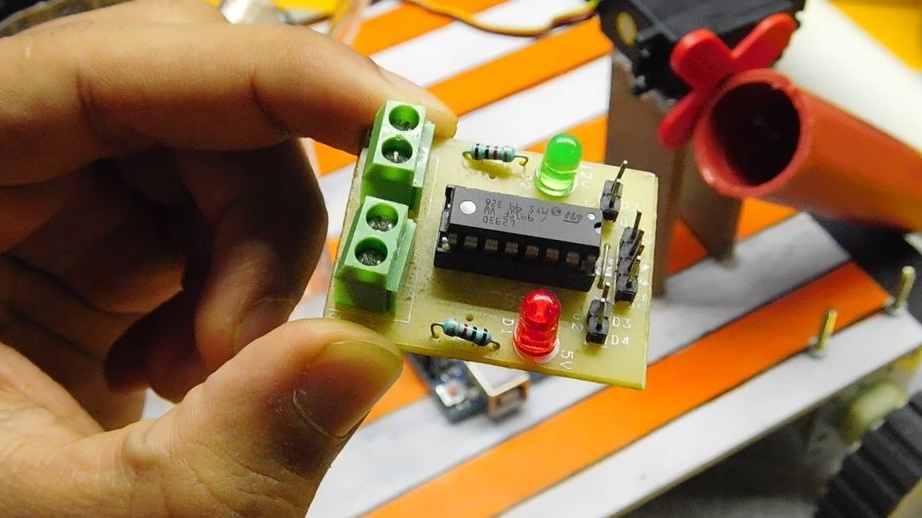
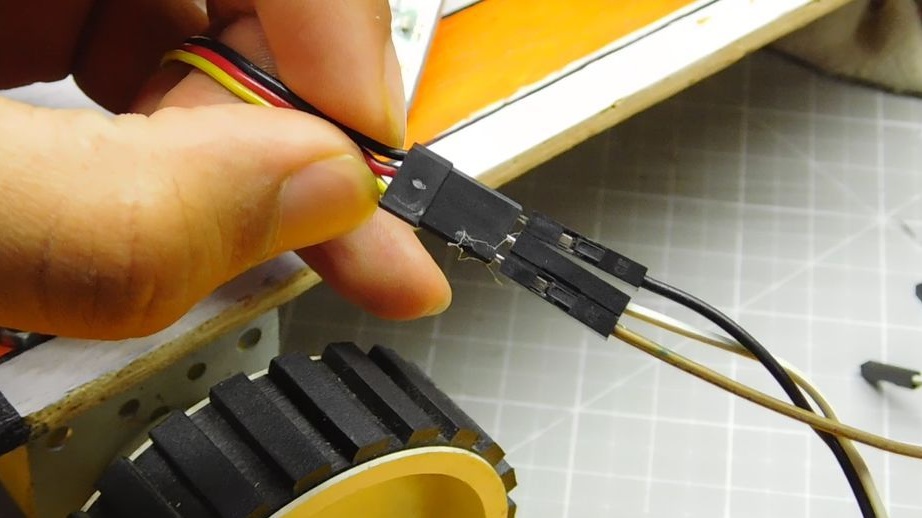
Μονάδα ελέγχου κινητήρα.
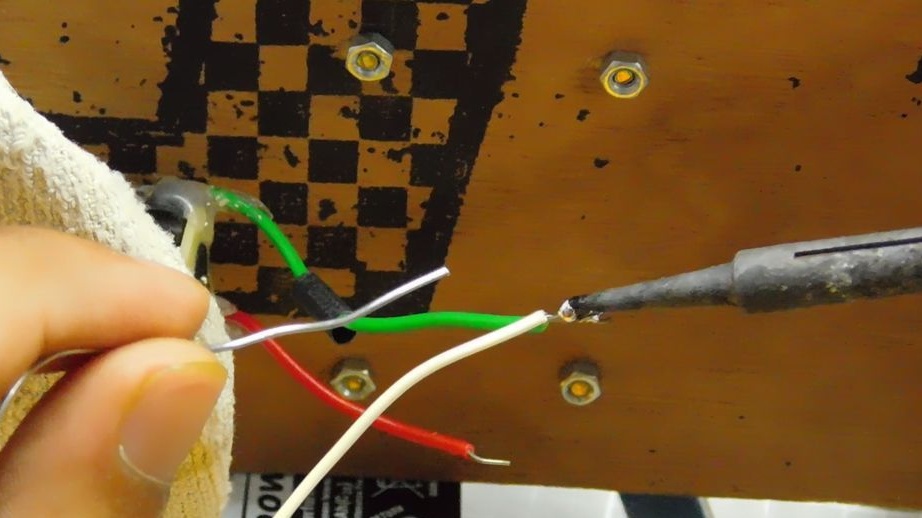
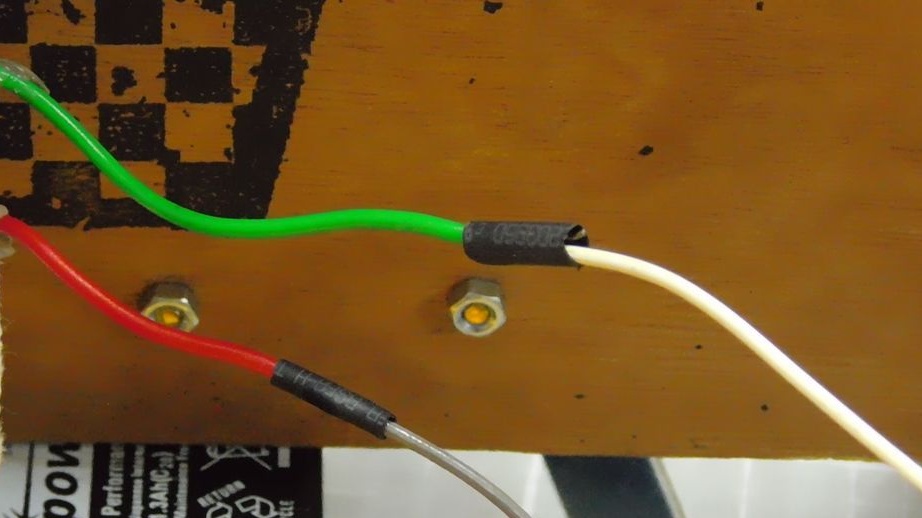
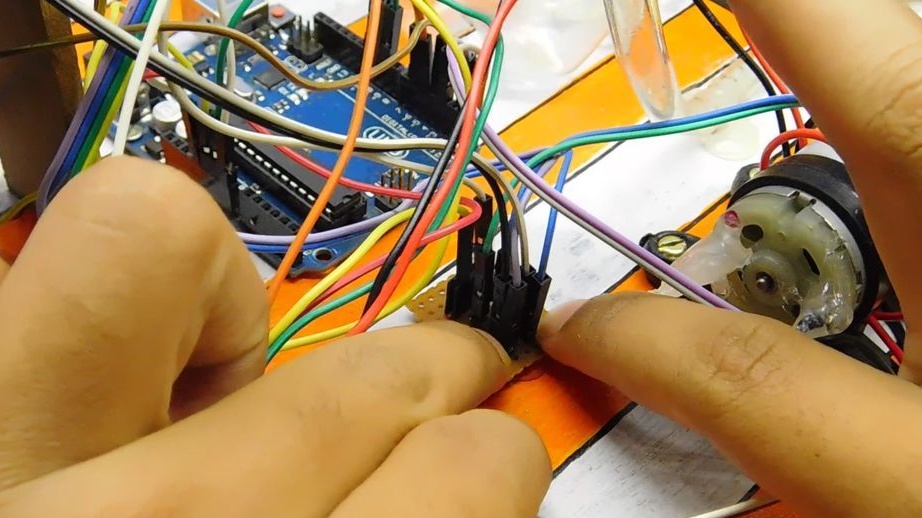
Συγκολλήσει τους κινητήρες (στους οποίους οι τροχοί στερεώνονται για κίνηση, όχι τα πινέλα). Στερεώνει τα καλώδια στις υποδοχές τοποθέτησης της μονάδας. Στη συνέχεια, συνδέστε τη μονάδα με το Arduino ως εξής.
Module ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5V - + 5V
Gnd-gnd
Η μονάδα + 12V θα συνδεθεί στη μπαταρία.
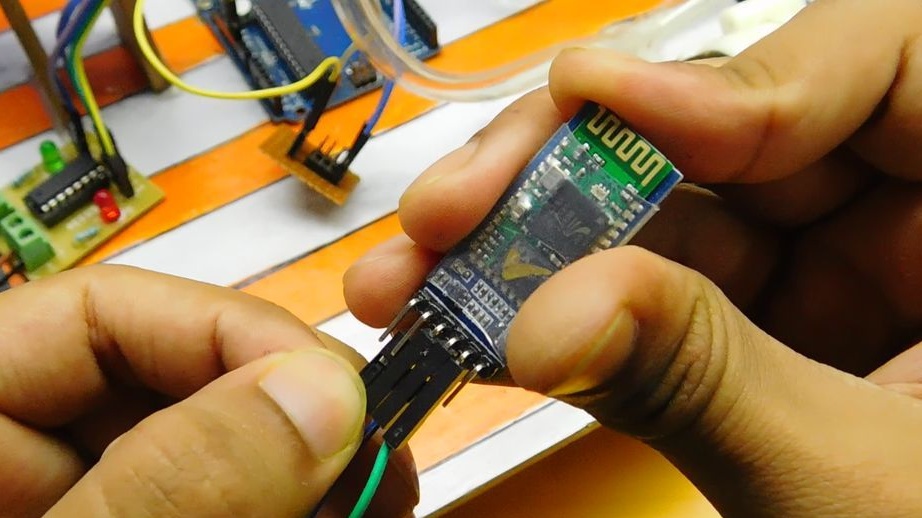
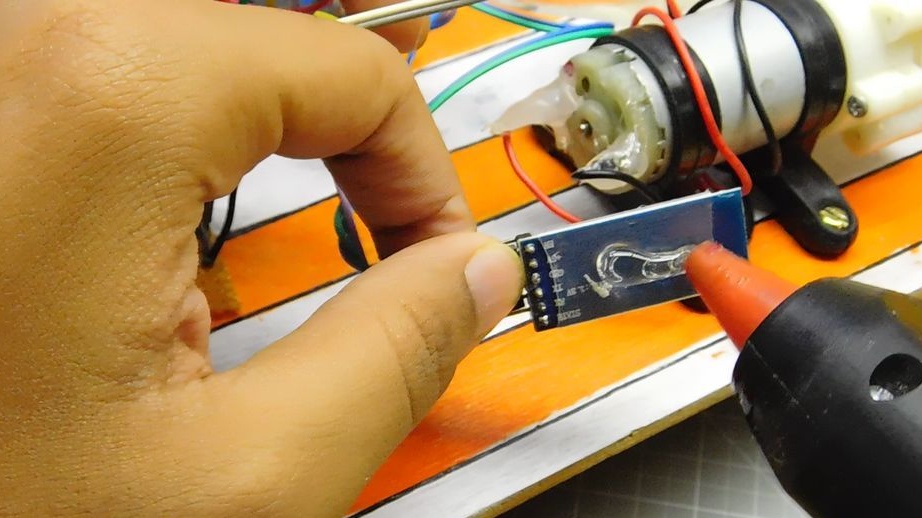
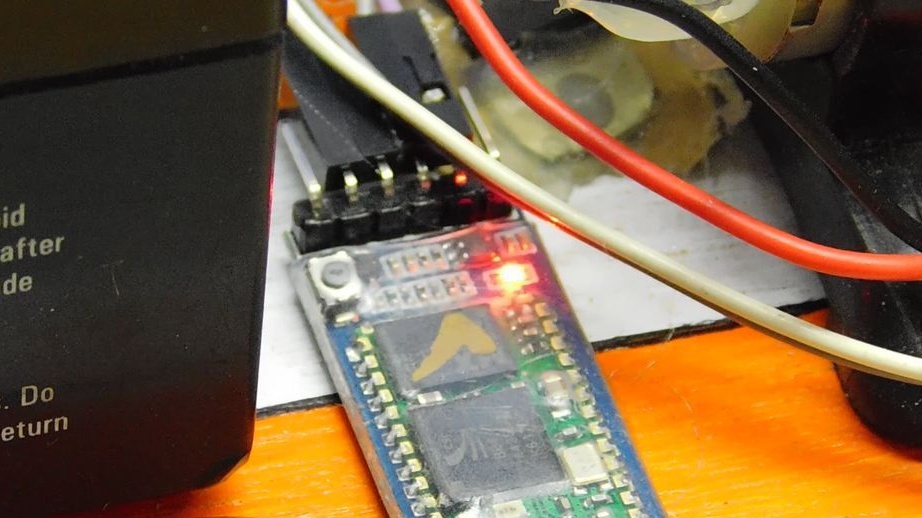
Σύνδεση Bluetooth.
Bluetooth ::: Arduino
Vcc - + 5V
Gnd - gnd
Rx-Tx
Tx-Rx
Σέρβο κινητήρα ::: Arduino
Vcc - + 5V
Gnd - gnd
Σήμα - D3
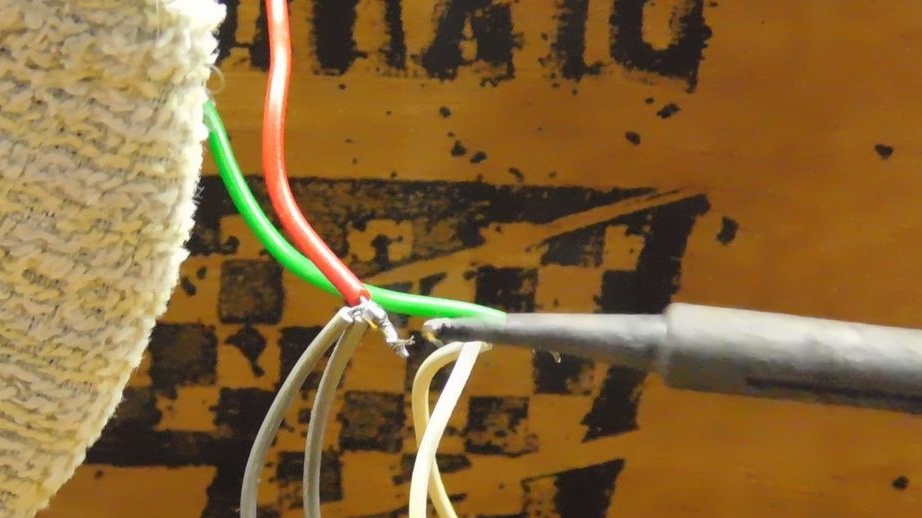
Στη συνέχεια συνδέει τους κινητήρες της αντλίας και των βουρτσών σύμφωνα με το σχέδιο. Οι ηλεκτροκινητήρες βουρτσών συνδέονται παράλληλα και περιστρέφονται προς διάφορες κατευθύνσεις, δεξιόστροφα και αριστερόστροφα.

Βήμα έξι: Συνδετήρες ρομπότ
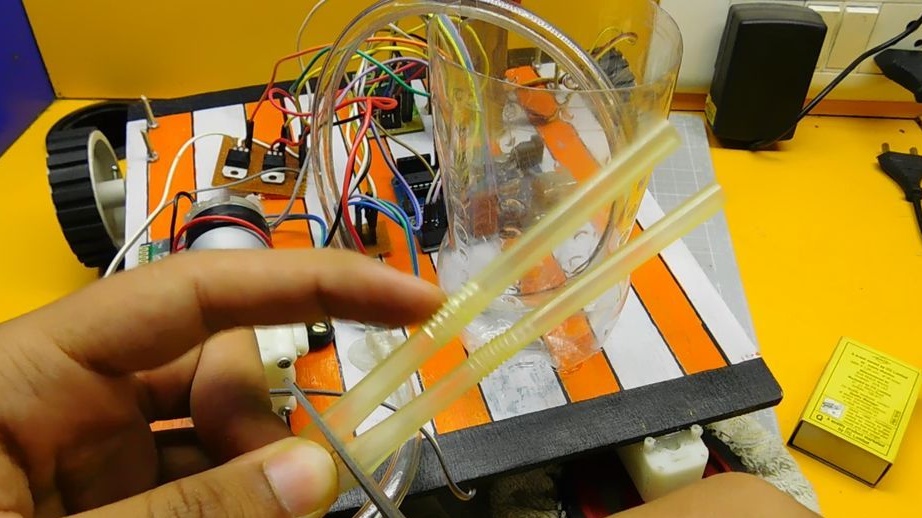
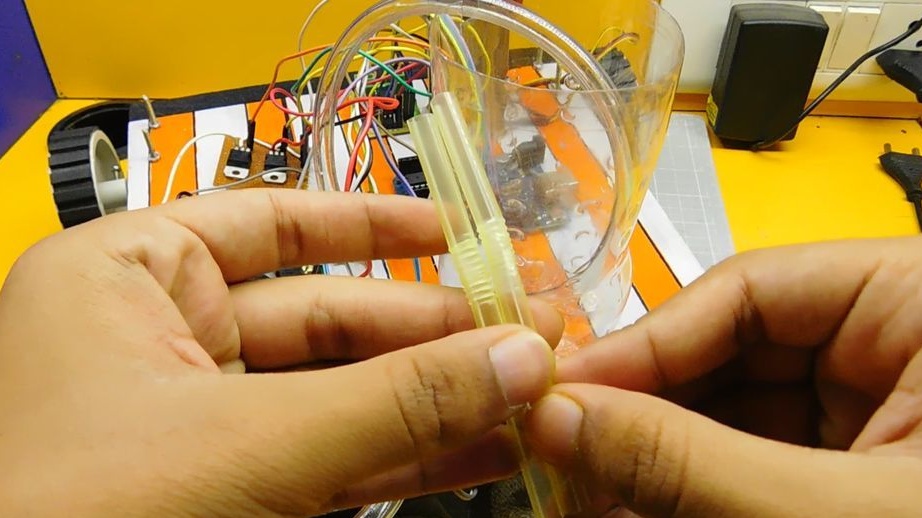
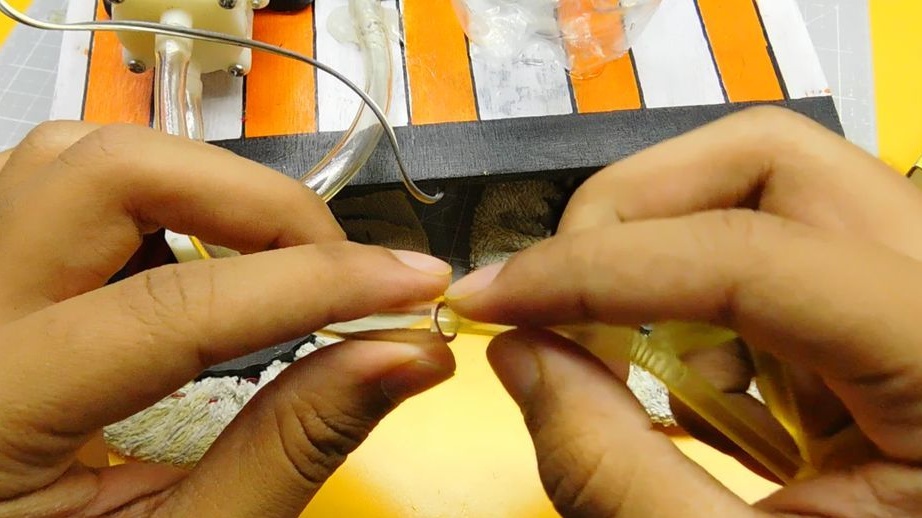
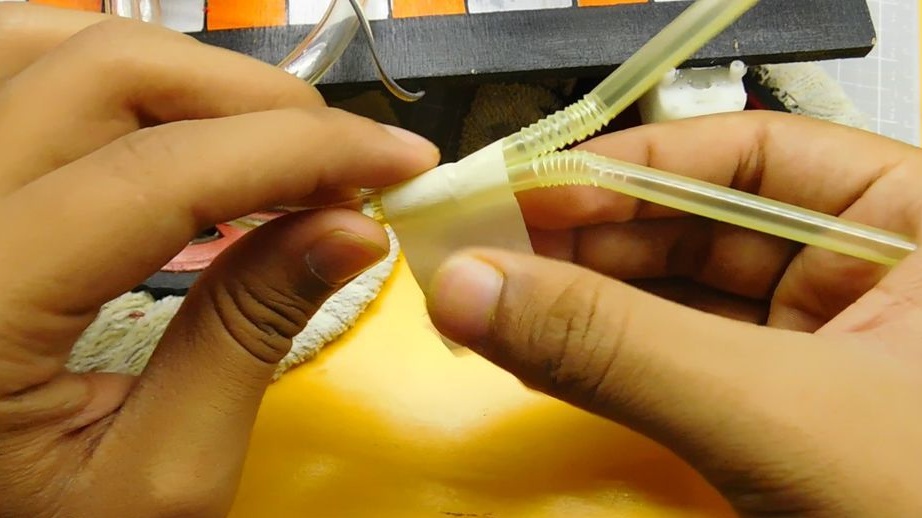
Κόβετε δύο άχυρα κοκτέιλ περίπου 7 εκ. Το καθένα. Εισάγει τα καλαμάκια στον αγωγό παροχής νερού. Συνθλίβει τα καλαμάκια μπροστά από τις βούρτσες.




Κλειδαριές στην πλατφόρμα ηλεκτρονικό εξαρτημάτων.

Βήμα επτά: κατεβάστε τον κώδικα
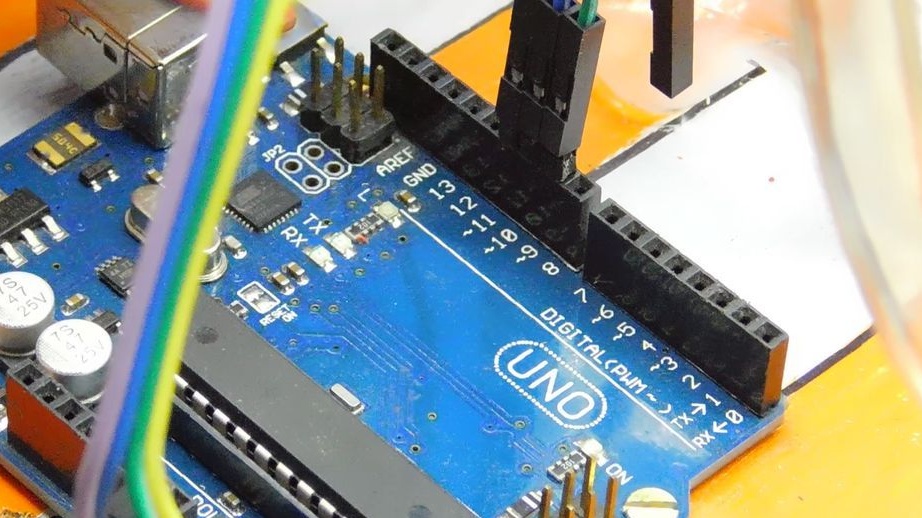
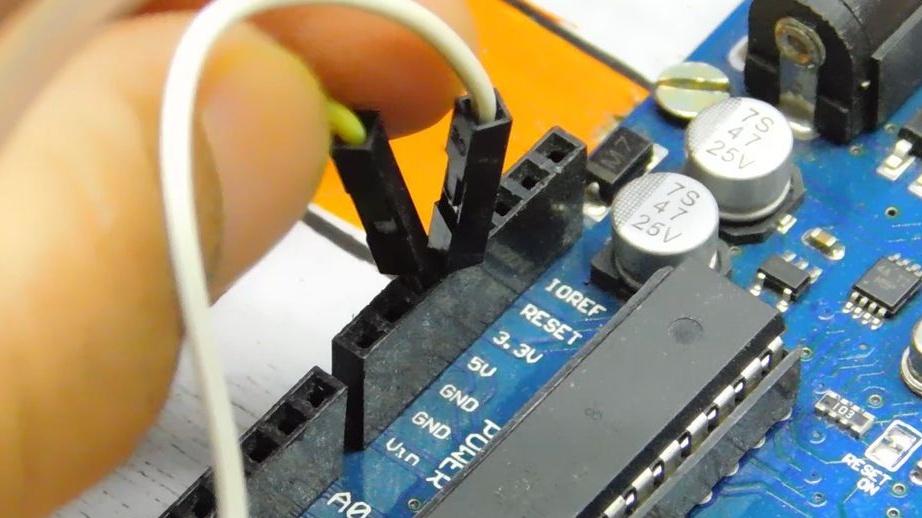
Αφαιρεί τους βραχυκυκλωτήρες Rx και Tx από τον πίνακα Arduino. Συνδέει τον πίνακα σε έναν υπολογιστή. Φορτώνει τον κώδικα. Ρυθμίζει τους βραχυκυκλωτήρες στη θέση τους. .
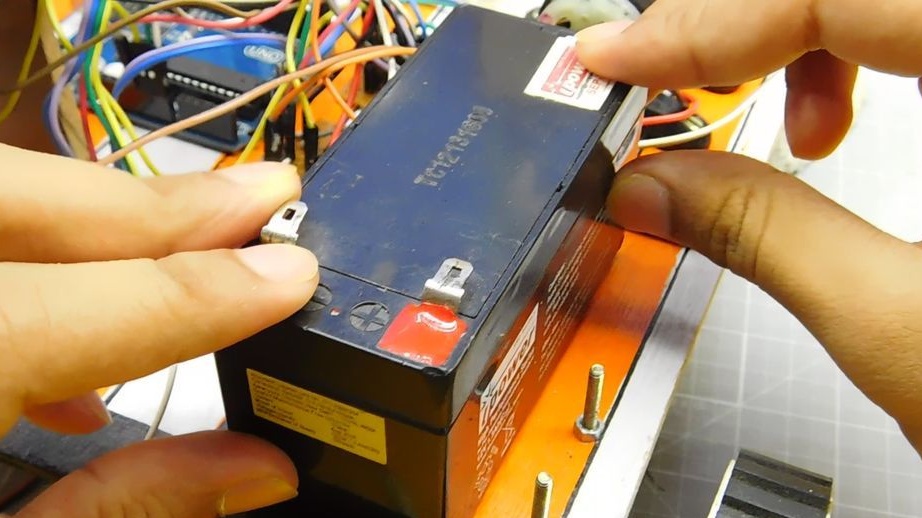
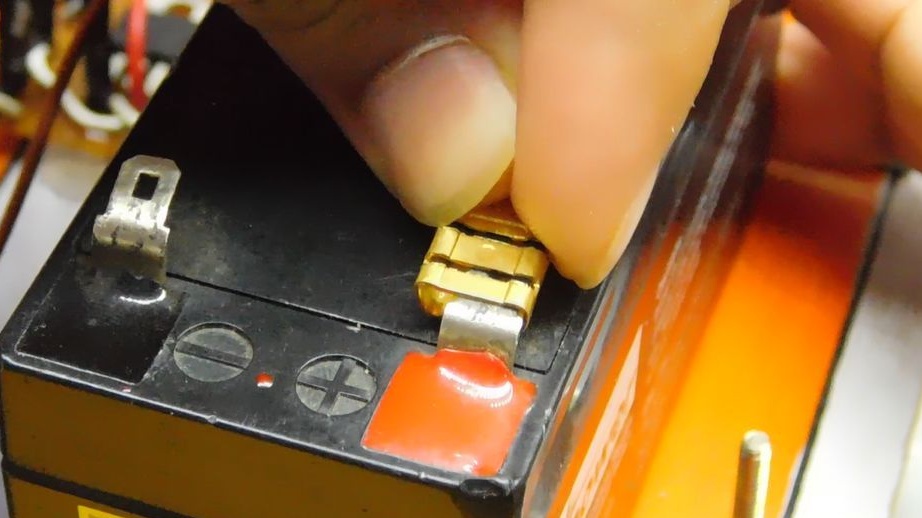
Βήμα Οκτώ: Μπαταρία
Διασφαλίζει, χρησιμοποιώντας διπλής όψης ταινία, την μπαταρία στην πλατφόρμα. Συνδέει ηλεκτρονικές συσκευές με την μπαταρία. Ο αρχηγός του Arduino συνιστά να συνδεθεί μέσω ενός διαιρέτη τάσης. Μπορείτε επίσης να προσθέσετε ένα διακόπτη στο κύκλωμα.

Βήμα εννέα: ελέγξτε το ρομπότ
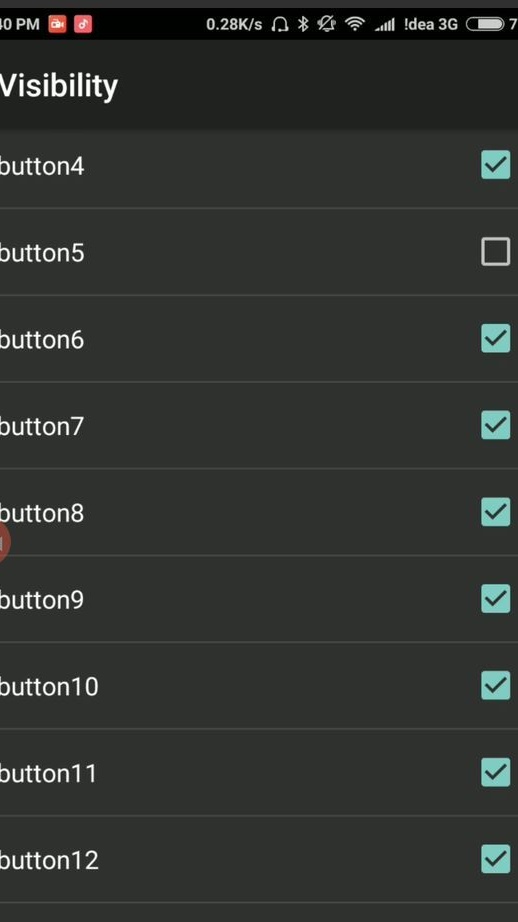
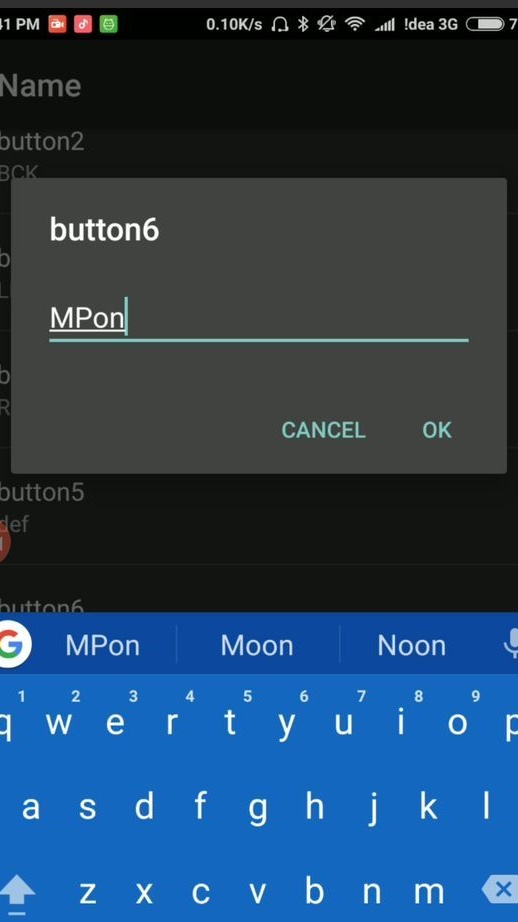
Από το Google Play, ο οδηγός κατεβάζει την εφαρμογή "Σειριακός ελεγκτής Bluetooth". Ανοίγει την εφαρμογή. Μεταβαίνει στις ρυθμίσεις> ορατότητα. Απενεργοποιεί τα κουμπιά 5, 9, 12. Πηγαίνει στα ονόματα. Ορίζει ένα κουμπί με 2-3 γράμματα σε κάθε κουμπί. Δείτε τη φωτογραφία παρακάτω.
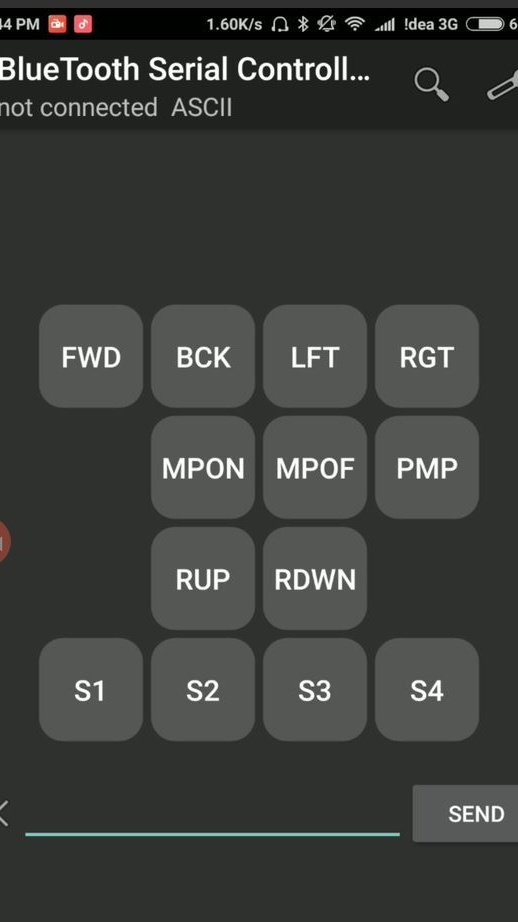
Στη συνέχεια, κάθε κουμπί εγκαθιστά μια εντολή (τα αποσπάσματα πρέπει να αφαιρεθούν, μην αλλάξετε την περίπτωση):
Κουμπί 1 (FWD): 'F'
Κουμπί 2 (BCK): 'Β'
Κουμπί 3 (LFT): 'L'
Κουμπί 4 (RGT): 'R'
Κουμπί 6 (MPON): 'M'
Κουμπί 7 (MPOF): 'm'
Κουμπί 8 (PMP): 'P'
Κουμπί 10 (RUP): 'U'
Κουμπί 11 (RDWN): 'u'
Κουμπί 13 (S1): '1'
Κουμπί 14 (S2): '2'
Κουμπί 15 (S3): '3'
Κουμπί 16 (S4): '4'
Στις εντολές stop> εντολές, εκχωρεί εντολές μόνο σε αυτά τα κουμπιά:
Κουμπί 1: 'S'
Κουμπί 2: 'S'
Κουμπί 3: 'S'
Κουμπί 4: 'S'
Κουμπί 8: 'p'

Τώρα παραμένει η σύνδεση με τη μονάδα bluetooth ("HC-05"), πληκτρολογήστε τον κωδικό πρόσβασης (1234 ή 0000) και μπορείτε να προσπαθήσετε να καθαρίσετε το δωμάτιο -)))
Χάρη στον κύριο πλοίαρχο και του ευχόμαστε να βελτιώσει το ρομπότ και να πάρει από αυτό εντελώς αυτόνομη εργασία.
Η όλη διαδικασία συναρμολόγησης του καθαριστικού ρομπότ μπορεί να δει στο βίντεο.