Ο πλοίαρχος έχει από καιρό ενδιαφέρονται για μοντέλα αεροσκαφών. Στην αρχή ήταν ένα μοντέλο αεροσκάφους, στη συνέχεια τετράτροπα. Σε αυτό το άρθρο, ο οδηγός θα σας πει τι υλικά είναι καλύτερο να επιλέξει για ένα quadrocopter, καθώς και πώς να κάνει ένα πλαίσιο από κόντρα πλακέ. Ας παρακολουθήσουμε ένα σύντομο βίντεο επίδειξης.
Για να κάνει ένα quadrocopter, ο πλοίαρχος χρησιμοποίησε τα εξής
Εργαλεία και υλικά:
-Πιστόλιθος από βισκόζη.
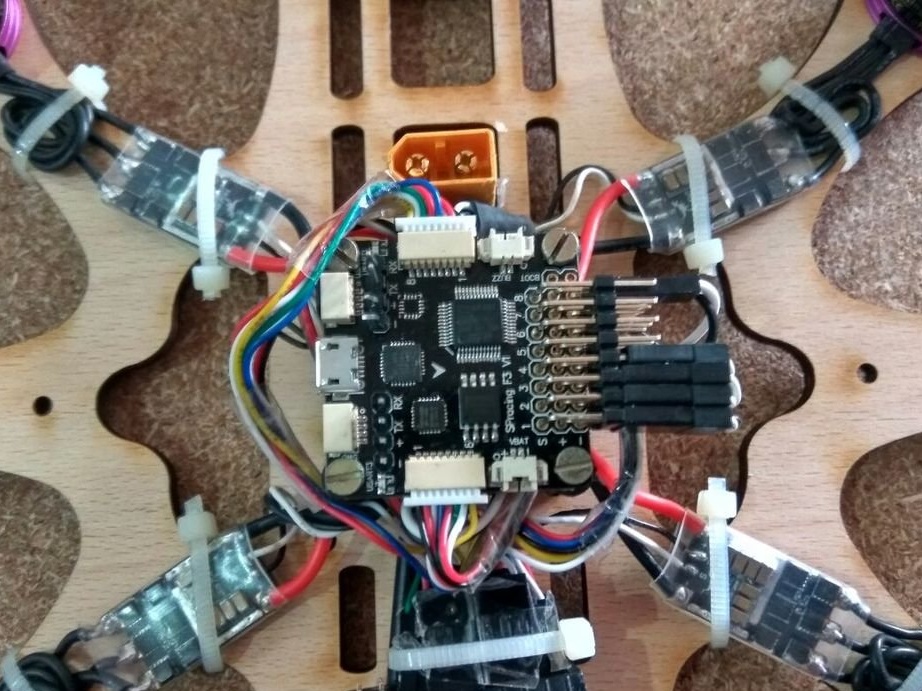
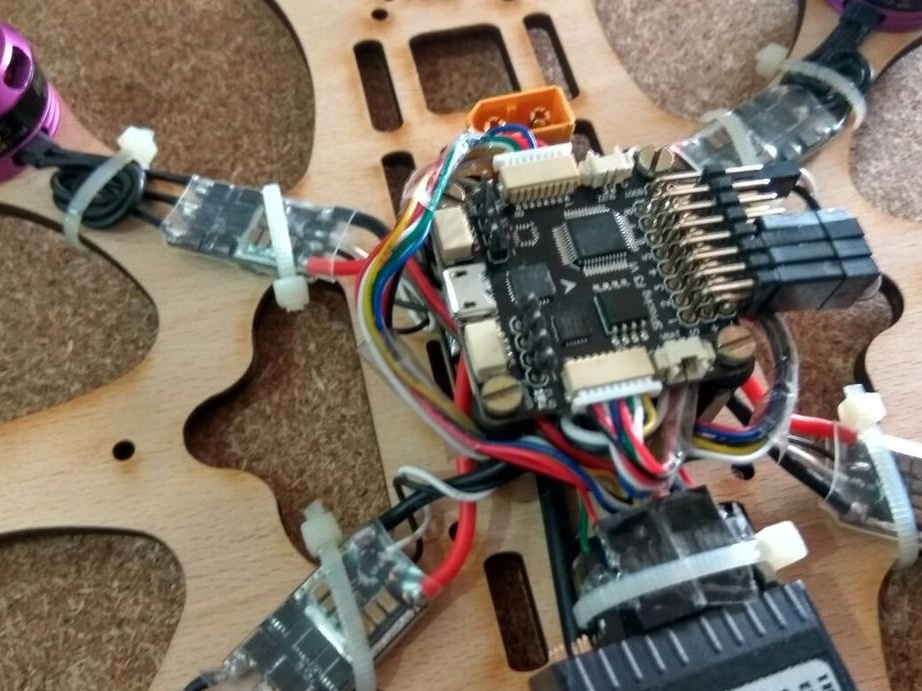
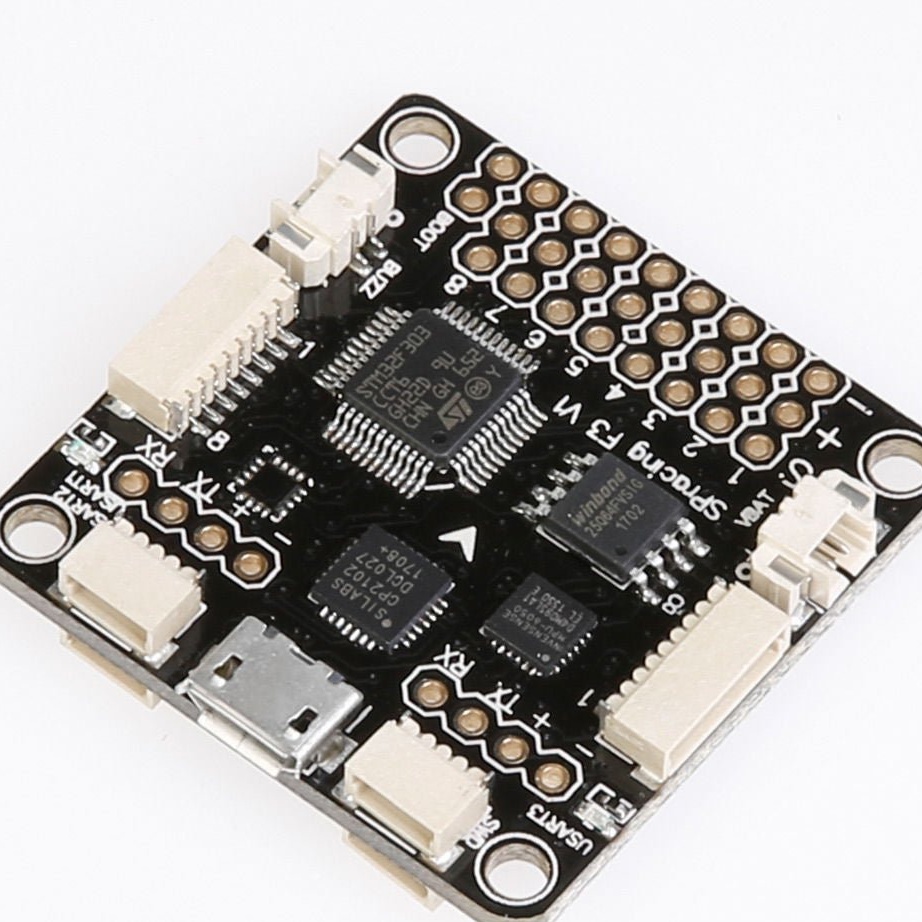
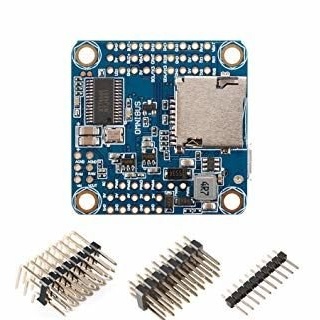
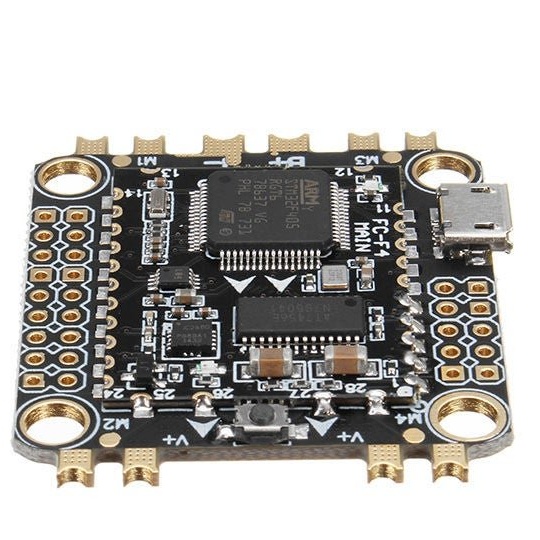
-Ελεγκτής Omnibus F4, SP Racing F3.
-Ματρική πίνακα διανομής ηλεκτρικής ενέργειας.
- Ελεγκτής HGLRC 28A BLHeli ESC - 4 τεμάχια.
- Motor Racestar BR2204 2600Kv Racing Edition -4 τεμάχια.
- Έλικες KingKong 5X4X3 - 4 τεμάχια.
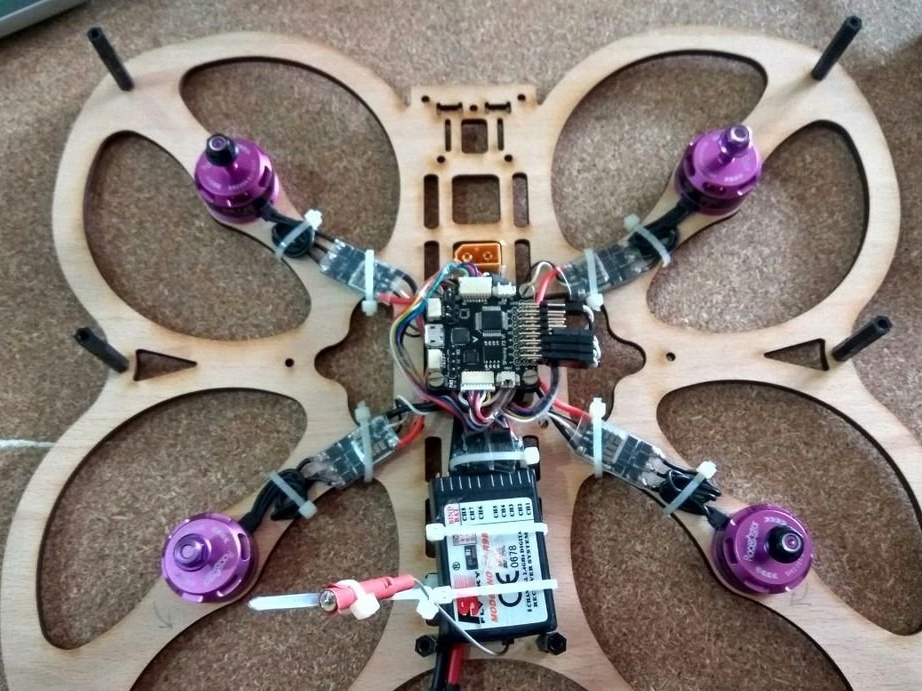
- μονάδα ραδιοφώνου Flsky TH9X με δέκτη,
Μπαταρία μπαταριών 3800 mAh;
-Racks. - 16 τεμάχια.
-Τα βίδες M3.
- κατσαβίδι ·
-Αξαρτήματα αξεσουάρ
-Κίνα;
- CNC κοπής?
Βήμα πρώτο: Επιλογή υλικού
Πλαίσιο.
Συνήθως το πλαίσιο είναι κατασκευασμένο από ελαφρά και άκαμπτα εξαρτήματα, όπως fiberglass, ίνες άνθρακα, ξύλο, αλουμίνιο, κλπ. Υπάρχουν πολλοί διαφορετικοί τύποι πλαισίων, ο κύριος θα κάνει ένα πλαίσιο για τέσσερις κινητήρες.
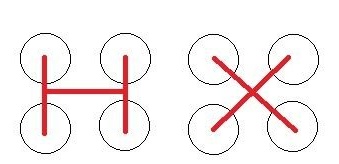
Τέτοια πλαίσια είναι κυρίως σε μορφή Η ή μορφή Χ. Το σχήμα X είναι μια καλή ισορροπία μεταξύ σταθερότητας και ελιγμού. Είναι αυτό το πλαίσιο που θα κάνει ο πλοίαρχος.

Ελεγκτής
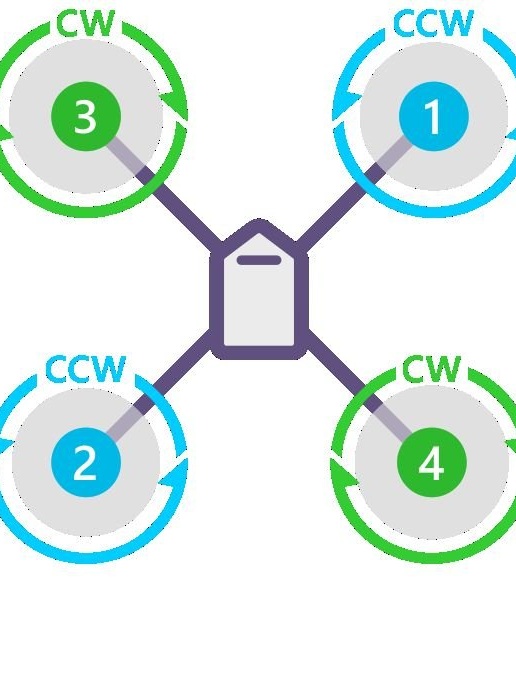
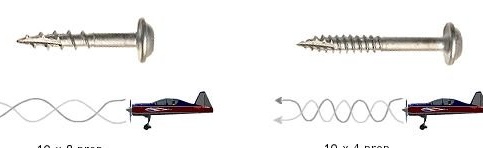
Ο ελεγκτής ελέγχει τη λειτουργία των κινητήρων. Το διάγραμμα δείχνει ότι όλοι οι κινητήρες περιστρέφονται σε αντίθετες κατευθύνσεις για να εξουδετερώνουν τη ροπή που παράγεται από κάθε κινητήρα. Ο ελεγκτής είναι ο εγκέφαλος ενός quadrocopter, είναι βασικά ένας μικρός υπολογιστής που χρησιμοποιεί τους αισθητήρες για τη συνεχή μέτρηση της γωνίας και της ταχύτητας.
Οι ελεγκτές πτήσης ταξινομούνται κατά κύριο λόγο σύμφωνα με τις προδιαγραφές του επεξεργαστή.

Κινητήρες
Υπάρχουν δύο τύποι κινητήρων, κινητήρες χωρίς ψήκτρες και κινητήρες χωρίς ψήκτρες. Οι περισσότεροι τετράτροχοι χρησιμοποιούν κινητήρες χωρίς ψήκτρες που μπορούν να ανταποκριθούν πολύ γρήγορα στις αλλαγές στις απαιτήσεις ταχύτητας και ροπής. Για κινητήρες χωρίς ψήκτρες, ειδικά ηλεκτρονικό (ESC).
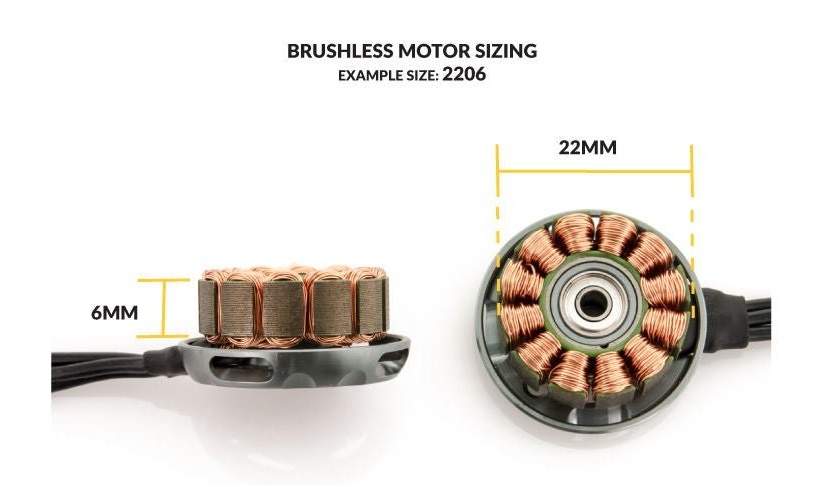
Το μέγεθος των κινητήρων χωρίς ψήκτρες υποδεικνύεται με έναν τετραψήφιο αριθμό - AABB. Το "AA" είναι το πλάτος του στάτη και το "BB" είναι το ύψος του στάτη ή η διάμετρος του στάτη, σε mm (χιλιοστά). Για παράδειγμα, το Racestar BR2205 έχει στάτη με διάμετρο περίπου 22 mm και ύψος περίπου 05 mm.
Στην πραγματικότητα, όσο υψηλότερος είναι ο στάτορας, τόσο μεγαλύτερη είναι η ισχύς σε υψηλότερες ταχύτητες και όσο ευρύτερη είναι η στάτη, τόσο μεγαλύτερη είναι η ροπή στις χαμηλότερες ταχύτητες.
Η τιμή KV του κινητήρα δείχνει την ταχύτητα με την οποία ο κινητήρας περιστρέφεται όταν εφαρμόζετε 1 volt στις περιελίξεις του.Καθορίζεται από τον αριθμό των περιελίξεων του σύρματος χαλκού στον στάτορα του κινητήρα και τη μαγνητική δύναμη των μαγνητών.
Λιγότερες περιελίξεις σημαίνουν λιγότερη αντίσταση και επομένως υψηλότερες στροφές. Αυτός είναι ο λόγος για τον οποίο οι κινητήρες με υψηλότερο KV τείνουν να έχουν λιγότερη περιέλιξη του στάτη.
Το KV καθορίζει ποια βίδα μπορείτε να χρησιμοποιήσετε με τον κινητήρα. Όσο χαμηλότερη είναι η KV, τόσο μεγαλύτερη είναι η βίδα που μπορεί να περιστραφεί και αντίστροφα. Δεν είναι δυνατό να αυξήσετε τη δύναμη ανύψωσης τοποθετώντας μια μεγαλύτερη βίδα στον κινητήρα με υψηλότερη KV, αφού οι απαιτήσεις ροπής θα υπερβαίνουν την επιτρεπόμενη ισχύ και ο κινητήρας θα υπερθερμανθεί.
Για παράδειγμα: Οι κινητήρες BR2205 2600 kV μπορούν να λειτουργούν με βίδες 5x4 ιντσών και οι κινητήρες BR2212 1000 kV μπορούν να λειτουργούν με βίδες 10x4,5 ιντσών
Το KV δεν είναι σε καμία περίπτωση ένας δείκτης της ισχύος του κινητήρα · οι κινητήρες με υψηλότερη τιμή KV δεν είναι αναγκαστικά πιο ισχυροί από τους κινητήρες με μικρότερη KV.


Ηλεκτρονικοί ελεγκτές στροφών (ESC).
Οι πρόσφατες εξελίξεις στον τομέα των μίνι τετρακόπτων έχουν καταστεί δυνατές χάρη στην εμφάνιση μικρών ηλεκτρονικών ελεγκτών ταχύτητας που επιτρέπουν τη λειτουργία κινητήρων χωρίς ψήκτρες. Η λειτουργία ηλεκτρονικών ελεγκτών ταχύτητας πρέπει να λαμβάνει το σήμα πεταλούδας από τον ελεγκτή πτήσης και να διατηρεί την περιστροφή του κινητήρα με την απαιτούμενη ταχύτητα.
Ορισμένες τεχνολογίες λειτουργούν μέσα σε αυτές τις μικρές συσκευές που δεν εμπίπτουν στο πεδίο εφαρμογής του παρόντος εγχειριδίου. Κατά την αγορά, επιλέξτε ένα ESC με ονομαστικό συνεχές ρεύμα τουλάχιστον 20% μεγαλύτερο από το υπολογιζόμενο.


Έλικες.
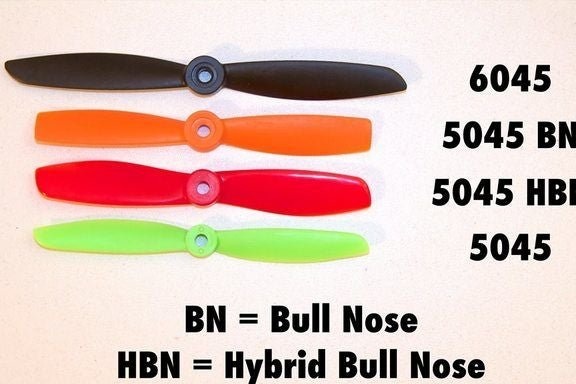
Οι έλικες μετατρέπουν τη μηχανική ενέργεια των κινητήρων σε έλξη. Το μέγεθος και το σχήμα της έλικας διαδραματίζουν τεράστιο ρόλο στην αποτελεσματικότητα της πτήσης.
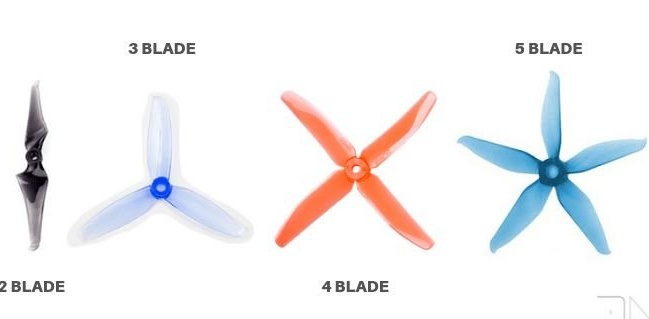
Υπάρχουν 2 τύποι μορφών που χρησιμοποιούν οι κατασκευαστές: L x P x B | LLPP x B. Όπου, L είναι το μήκος, P είναι το βήμα, B είναι ο αριθμός των λεπίδων.
Οι έλικες μπορούν να κατασκευαστούν από διάφορα υλικά, όπως είναι τα πλαστικά σύνθετα υλικά, οι ίνες άνθρακα, το ξύλο κλπ. Κάθε τύπος υλικού έχει μοναδικά χαρακτηριστικά, όπως για παράδειγμα οι ίνες άνθρακα και το ξύλο είναι πραγματικά άκαμπτες και γνωστές για την ομαλή λειτουργία τους και ορισμένα πλαστικά είναι εξαιρετικά ανθεκτικά. Οι περισσότερες από τις βίδες που χρησιμοποιούνται στα μίνι τετρακόπτερα κατασκευάζονται από πλαστικά σύνθετα υλικά.
Το μέγεθος της έλικας που μπορείτε να χρησιμοποιήσετε είναι περιορισμένο από το μέγεθος του πλαισίου σας, καθώς και την ισχύ HF του κινητήρα σας. Κατά κανόνα, όσο περισσότερο έλικα μπορείτε να χρησιμοποιήσετε για να δημιουργήσετε μια συγκεκριμένη ώθηση, τόσο πιο αποτελεσματική θα είναι. Για τα μίνι τετράτροχα, διαφέρουν μεταξύ βιδών 5-6 ιντσών σε βήματα 4-5 ίντσας.
Ο αριθμός των λεπίδων επηρεάζει την πρόσφυση και την κατανάλωση ενέργειας. Όσο περισσότερες λεπίδες, τόσο περισσότερη έλξη και περισσότερη ενέργεια χάνεται.

Μπαταρίες
Επί του παρόντος, οι περισσότεροι drones χρησιμοποιούν μπαταρίες πολυμερούς λιθίου, κοινώς γνωστές ως μπαταρίες Lipo. Η μπαταρία μαζί με το ESC και τον κινητήρα είναι ένα τετραπλό σύστημα ισχύος.
Μην σκεφτείτε την μπαταρία ως δεξαμενή ενέργειας, οι κινητήρες μπορούν να τραβήξουν μια τερατώδη ποσότητα των αμπέρ σε πολύ μικρά χρονικά διαστήματα. Οι μπαταρίες LiPo είναι ένα σύνολο κυψελών, καθένα από τα οποία έχει ονομαστική τάση 3.7 V. Εάν απαιτείται υψηλότερη τάση, αυτά τα κελιά μπορούν να συνδεθούν εν σειρά για να σχηματίσουν μία μπαταρία. Οι μπαταρίες που συνδέονται σε σειρά επισημαίνονται με το γράμμα "S" και παράλληλα με το γράμμα "P".
Όσο περισσότερα κύτταρα συνδέονται σε σειρά, τόσο μεγαλύτερη είναι η τάση και τα περισσότερα κύτταρα παράλληλα, τόσο μεγαλύτερη είναι η χωρητικότητα.
Για παράδειγμα:
1S = 1 κύτταρο = 3.7 V
2S = 2 κύτταρα = 7,4 V
3S = 3 κύτταρα = 11,1 V
4S = 4 κύτταρα = 14,8 V
5S = 5 κύτταρα = 18,5 V
6S = 6 κύτταρα = 22,2 V
Η χωρητικότητα αναφέρεται σε milliamperes ή "mAh". Αυτός είναι ο αριθμός των μπαταριών που μπορεί να παραδώσει μια μπαταρία σε μία ώρα. Για παράδειγμα, μια μπαταρία 3S 2000 mAh μπορεί να παρέχει 2 A για 1 ώρα. οπότε αν το quadcopter τραβά 20Α, τότε η πτήση του θα συνεχίσει για 2/20 * 60min = 6 λεπτά.
Η ονομαστική εκφόρτιση υποδεικνύει τη μέγιστη ταχύτητα με την οποία μπορείτε να αντλείτε ρεύμα από την μπαταρία. Εμφανίζεται με τον αριθμό "C" στην κορυφή. Όσο υψηλότερη είναι η βαθμολογία C, τόσο μεγαλύτερη είναι η ποσότητα ρεύματος που μπορεί να δώσει η μπαταρία.
Για παράδειγμα, μια μπαταρία 2000 mAh 25C μπορεί να παραδώσει μέχρι 2000x25 = 50.000 mA ή 50 Α.



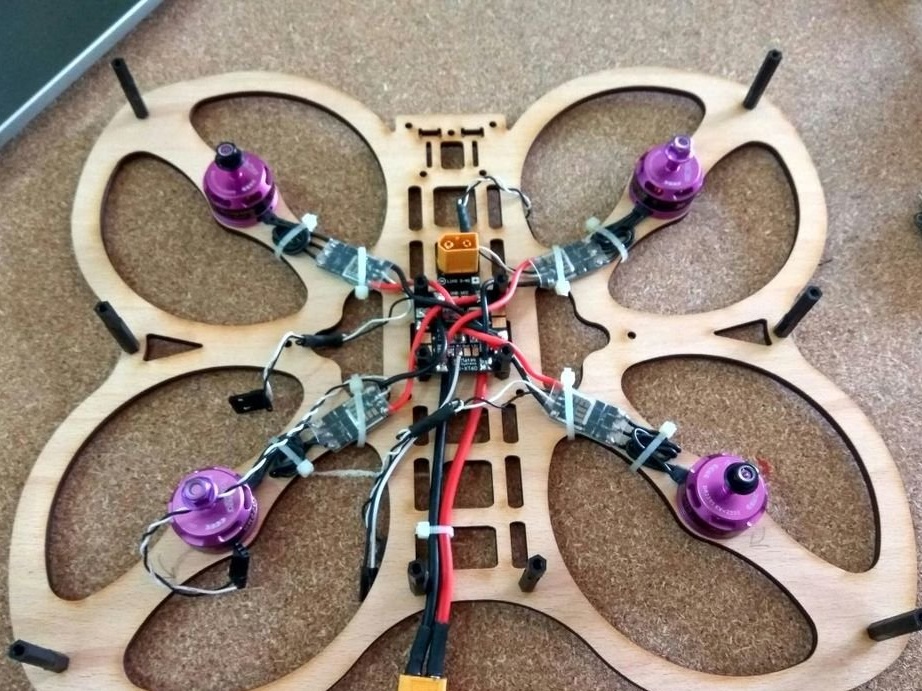
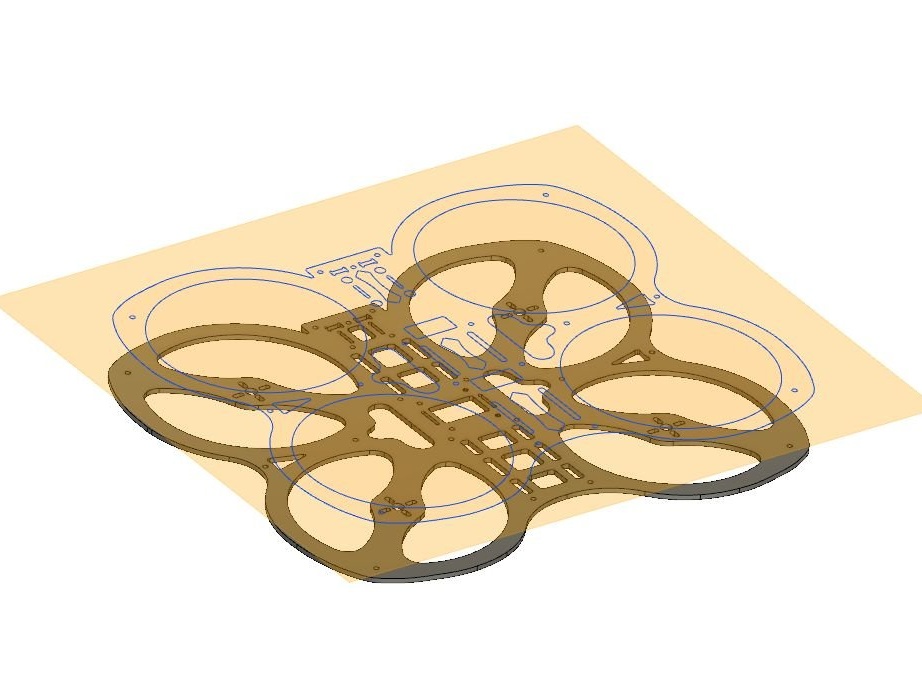
Βήμα δεύτερο: Σχεδιασμός και συναρμολόγηση του πλαισίου
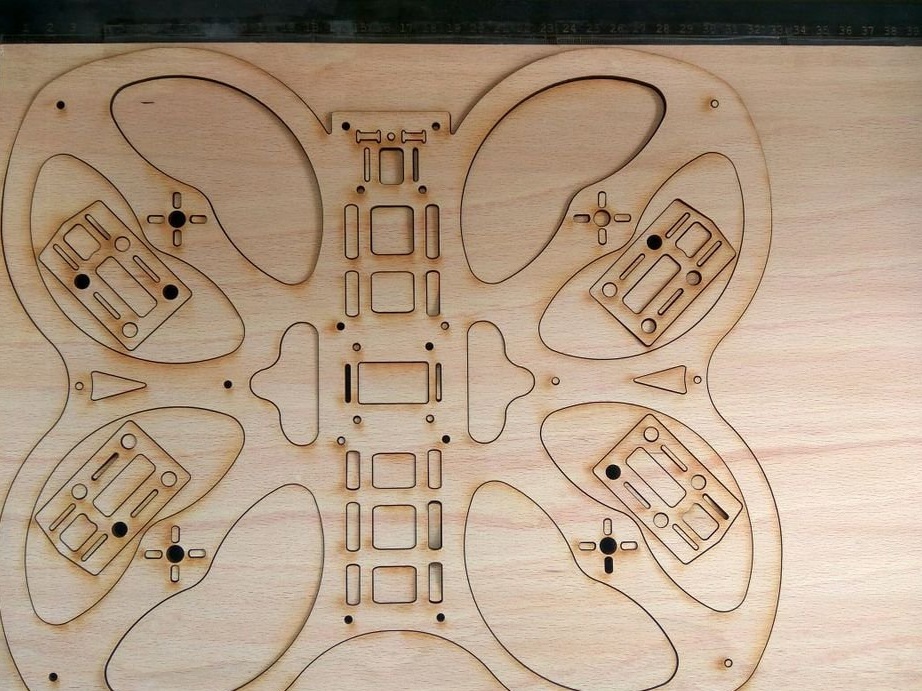
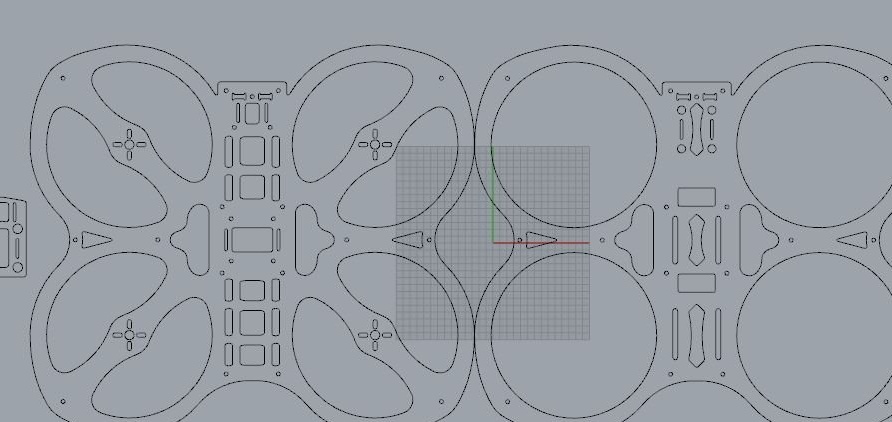
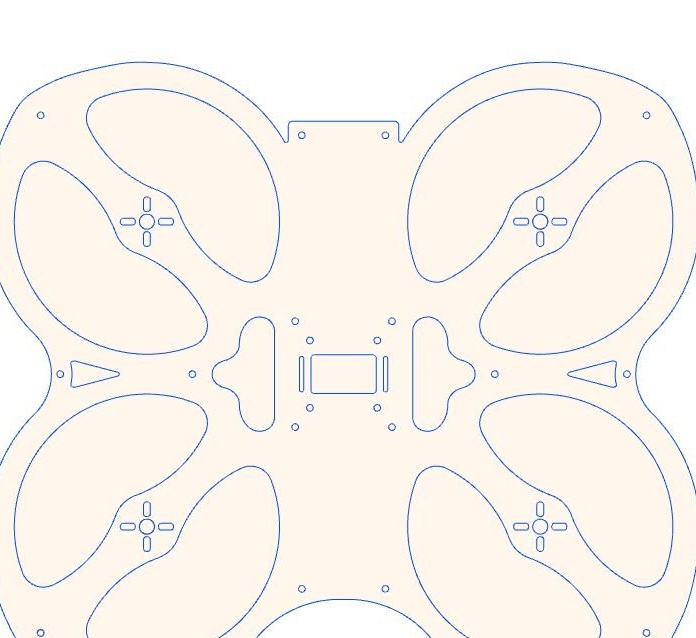
Ο σχεδιασμός του πλαισίου εμπνεύστηκε από το σχήμα πεταλούδας μονάρχης.Όταν κοιτάζετε το πλαίσιο από ψηλά, μοιάζει με δύο φτερά.
Ο οδηγός σχεδίασε το Fusion 360 και το Rhino CAD. Το μέγεθος του πλαισίου είναι περίπου 230 χιλιοστά, οφείλεται στη διαγώνια απόσταση από τη μία πλήμνη του κινητήρα στην άλλη. Τα πιο δημοφιλή μεγέθη πλαισίων είναι 210 mm, 250 mm, κλπ. Μόλις ορίσετε το μέγεθος του πλαισίου, τραβήξτε τις βάσεις του κινητήρα.
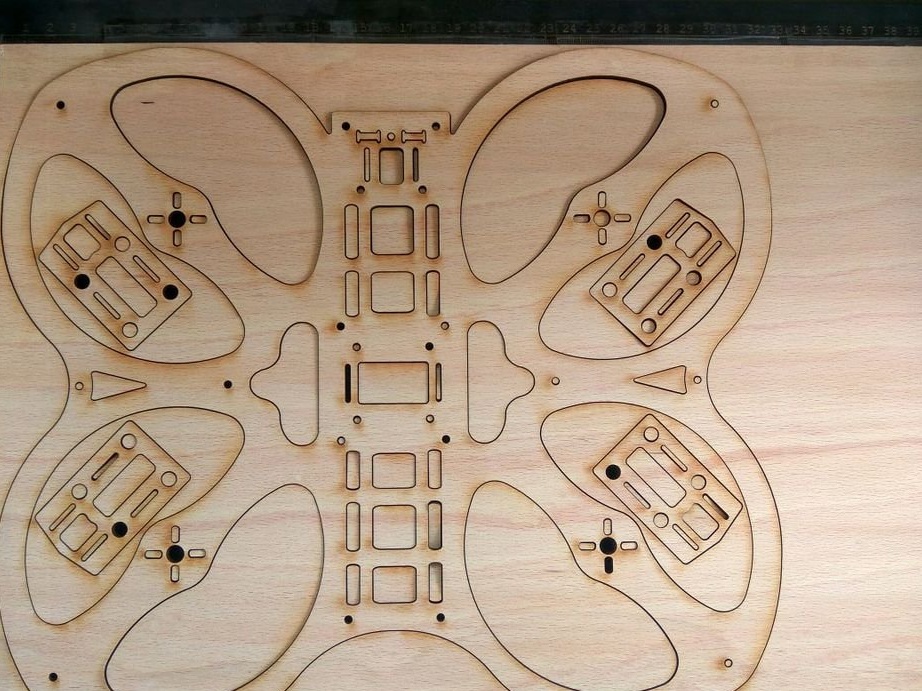
Το κεντρικό κτίριο είναι ο τόπος όπου θα εγκατασταθούν όλα τα ηλεκτρονικά συστήματα, συμπεριλαμβανομένου του χειριστηρίου πτήσης, του δέκτη, της μπαταρίας κλπ. Στο μέσον υπάρχουν 4 οπές M3 σε απόσταση 30,5 mm μεταξύ τους.
Το αντικείμενο κατασκευάζεται με κοπή λέιζερ. Εάν δεν έχετε κόπτη, μπορείτε να κόψετε το εργαστήριο. Μπορείτε να κατεβάσετε το αρχείο κοπής παρακάτω.
Αρχείο Design.rar









Βήμα τρίτο: Κατασκευάστηκε
Τώρα πρέπει να συναρμολογήσετε ένα τετράτροχο.
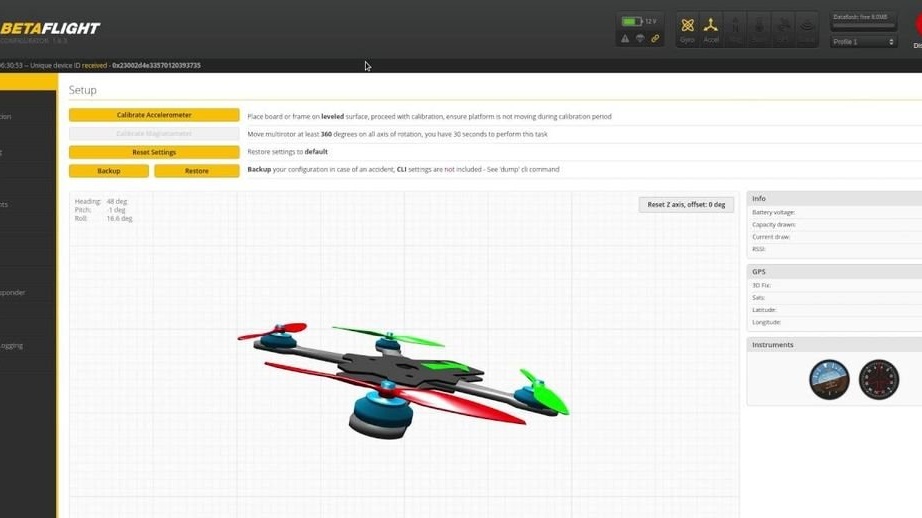
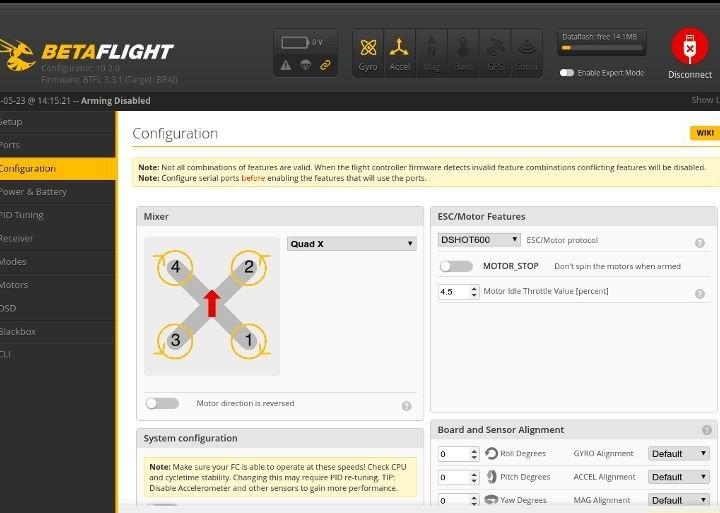
Πρώτα πρέπει να αναβοσβήνει ο ελεγκτής με το firmware Betaflight. Στη συνέχεια βαθμονομήστε τον αισθητήρα. Συνδέστε τη μονάδα ραδιοφώνου και ελέγξτε τη λειτουργία της. Τοποθετήστε τους κινητήρες στο πλαίσιο σύμφωνα με το διάγραμμα του πλαισίου X με τη σωστή φορά περιστροφής. Συνδέστε το μοτέρ με τους ακροδέκτες ESC και στερεώστε το ESC στη βάση. Συνδέστε την πλακέτα διανομής ενέργειας και συνδέστε τα μαξιλάρια ESC. Συνδέστε το Soler XT60 στο καλώδιο τροφοδοσίας και, στη συνέχεια, στον πίνακα διανομής ισχύος. Τοποθετήστε τον ελεγκτή. Συνδέστε τα καλώδια από το ESC στον ελεγκτή πτήσης. Τοποθετήστε τον δέκτη στο πλαίσιο. Τοποθετήστε το επάνω κάλυμμα.