
Κοιτάζοντας μέσα από τους χαράκτες λέιζερ στο aliexpress, ο πλοίαρχος συναντήθηκε με πολλά μοντέλα που τροφοδοτούνται με USB. Ήταν καταπληκτικό ότι μπορούσαν να χαράξουν διάφορα υλικά, καθώς και να κόψουν σχήματα και μοτίβα από αυτοκόλλητα και χαρτί και να κάνουν όλη αυτή τη δύναμη από το 5V USB. Αλλά το μειονέκτημα αυτών των χαρακτών ήταν ότι είχαν μια μικρή επιφάνεια εργασίας, στις περισσότερες περιπτώσεις μόνο 40 mm x 40 mm.
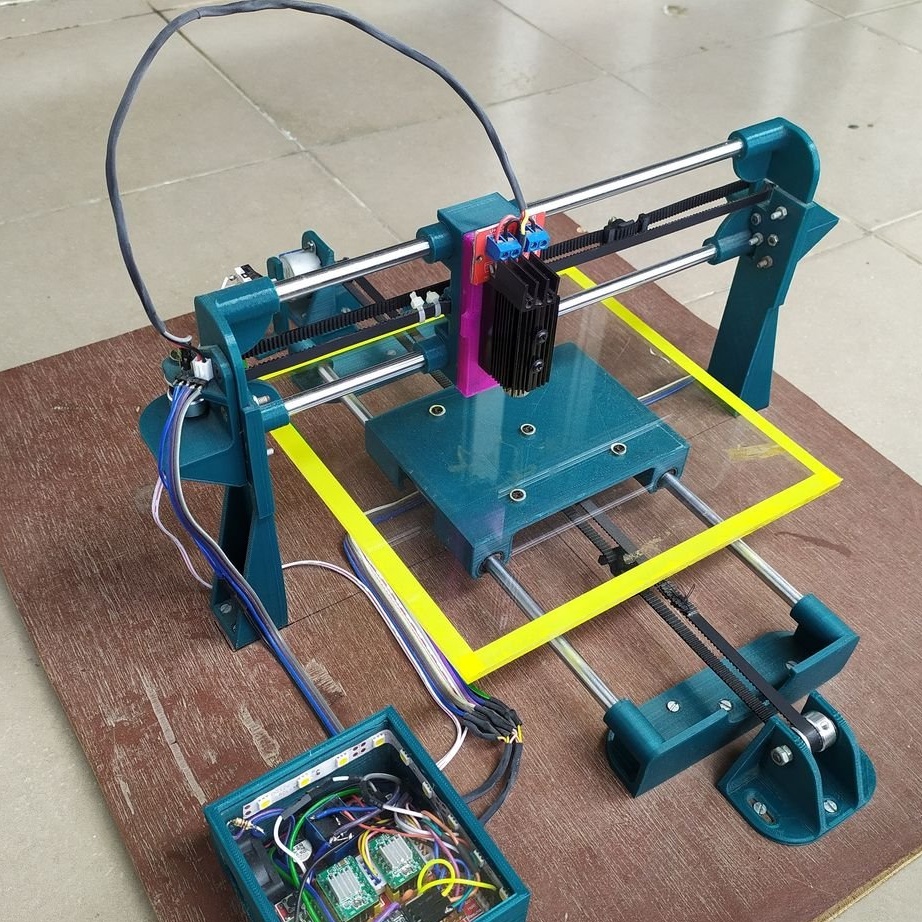
Στη συνέχεια, ο πλοίαρχος αποφάσισε να σχεδιάσει και να κατασκευάσει ανεξάρτητα έναν χαράκτη χρησιμοποιώντας έναν 3D εκτυπωτή για κατασκευή. Κατά μήκος του δρόμου, αποφάσισε να φτιάξει τη θήκη λέιζερ έτσι ώστε το λέιζερ να μπορεί εύκολα να αντικατασταθεί με ένα στυλό ή δείκτη. Έχει επίσης προστεθεί μια λειτουργία σύνδεσης Bluetooth.
Οι τεχνικές προδιαγραφές του χαράκτη έχουν ως εξής:
- Χώρος εργασίας 200 x 162 mm
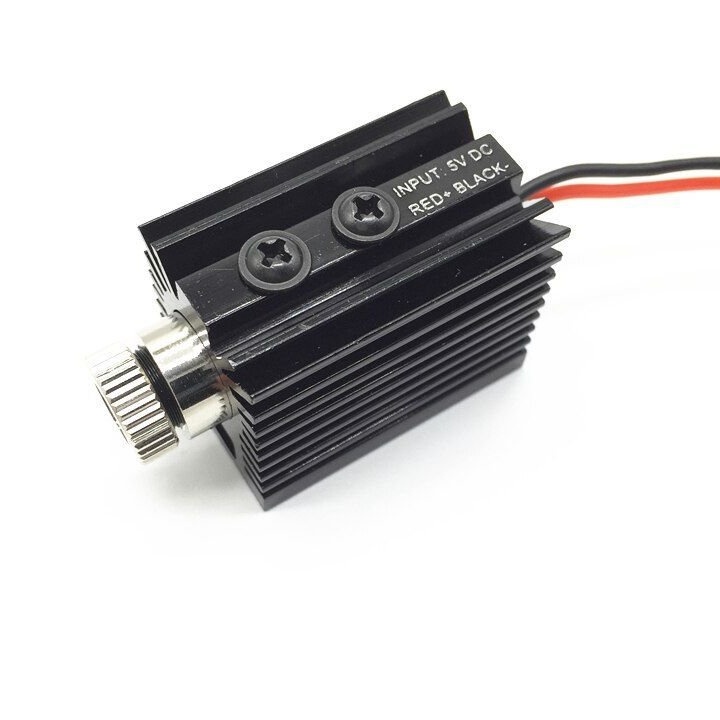
-1000 mw μονάδα λέιζερ
-Εργασίες από μια πηγή τροφοδοσίας USB (5V)
-Αυτόματη λειτουργία καθοδήγησης
- Επικοινωνία Bluetooth μεταξύ του χαράκτη λέιζερ και του υπολογιστή
- Έλεγχος λέιζερ PWM. (Βοηθά στη δημιουργία διαφορετικών αποχρώσεων του μαύρου όταν χαράζετε πορτρέτα)
-102,4 βήματα ανά ανάλυση mm
- Το μηχάνημα μπορεί να χαράξει, να κόψει και να αντλήσει από διαφορετικά υλικά

Εργαλεία και υλικά:
-Αrduino UNO;
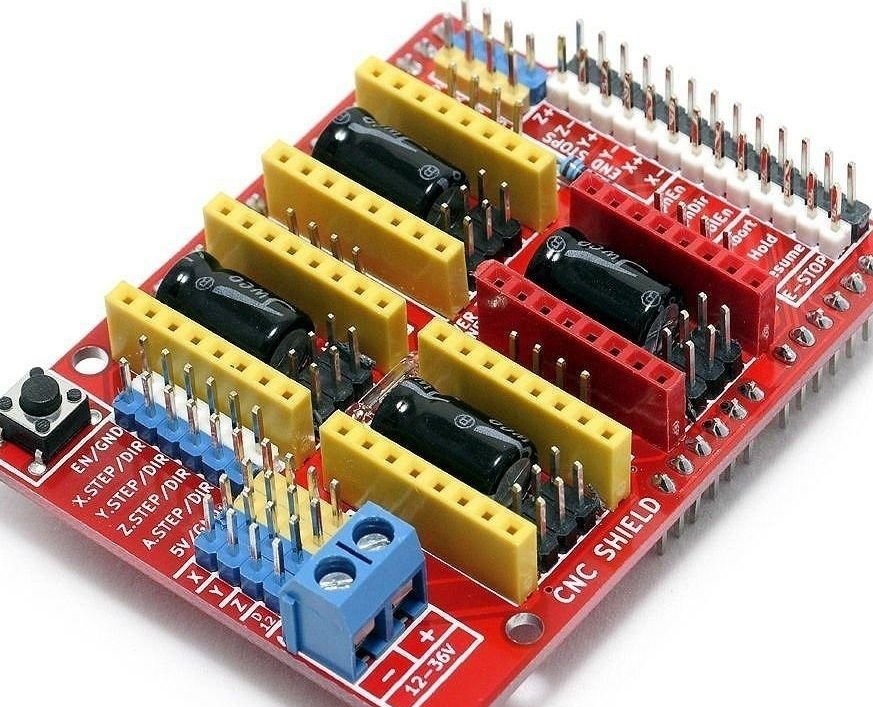
-Αναπτυξιακή πλακέτα.
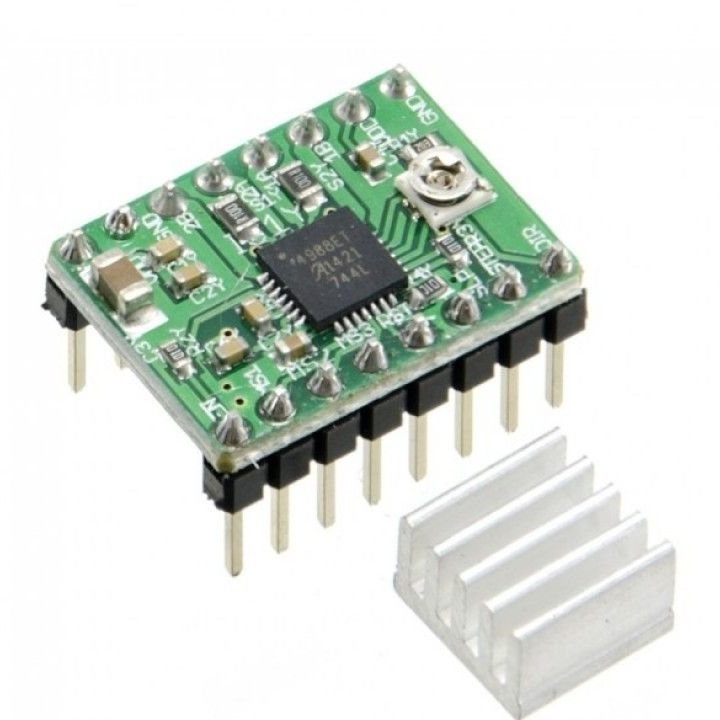
- οδηγός βηματικού κινητήρα A4988 - 2 τεμάχια.
-1000 mW μονάδα λέιζερ?
- Arduino Nano.
- Μετατροπέας ώθησης XL6009.
- Γραμμικά ρουλεμάν LM8UU - 6 τεμάχια.
Τροχαλία - 4 τεμάχια.
- Ράβδοι διαμέτρου 8 mm, μήκος 300 mm - 4 τεμάχια.
-μονάδα IRF520 Mosfet;
- Ρελέ.
- Οριακοί διακόπτες - 2 τεμάχια.
-Μηχανές βημάτων 2 τεμ.
- μαγνήτες νεοδυμίου 18 x 5 mm x 3 mm.
-30 * 30 mm ανεμιστήρα ψύξης 5 volt;
-Belt;
-HC-05 μονάδα Bluetooth?
-SG90 σερβοκινητήρα;
Βιδώστε τα τερματικά
- Σωλήνας συμπύκνωσης.
- Superglue.
- Δεσμοί -
-Συνδέσεις
M3 30mm
Μπουλόνια M3 12 mm
M4 40mm
M3 καρύδια
M4 καρύδια?
- Κόντρα πλακέ 8mm 48 x 42 cm.
-5 χιλιοστά διαφανές ακρυλικό φύλλο 22 x 22 εκ.
- Καλώδιο MicroUSB.
-Χαρτί αποβλήτων.
-Διαφήθηκε.
- κατσαβίδι ·
-Αξαρτήματα αξεσουάρ
- Πένσες.
- ψαλίδι ·
-Nippers;
- Υπολογιστή με λογισμικό.











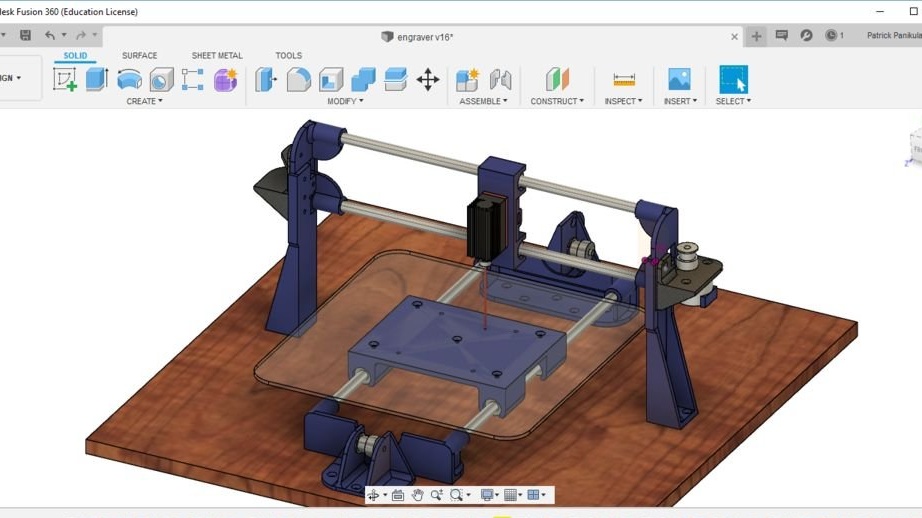
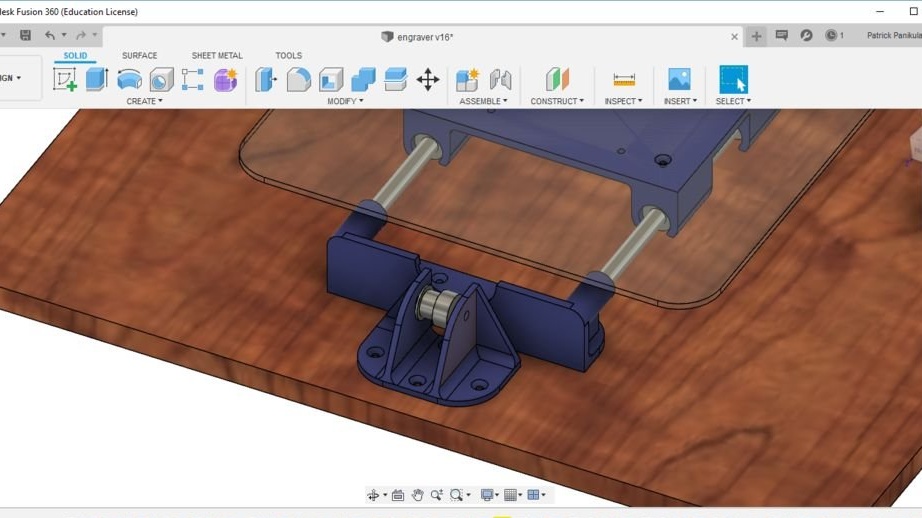
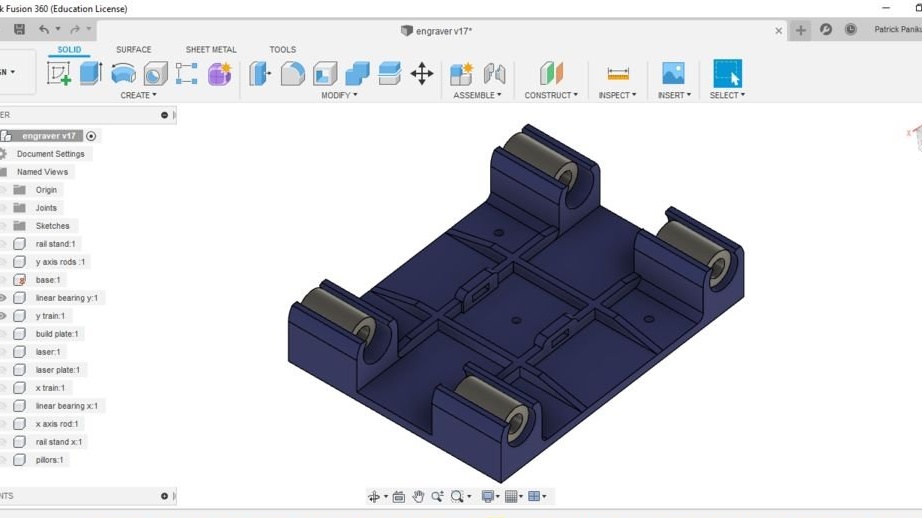
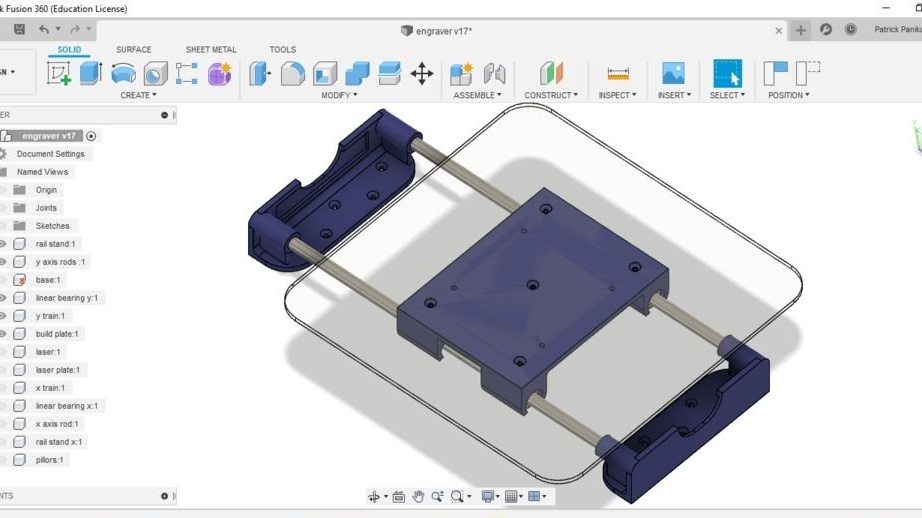
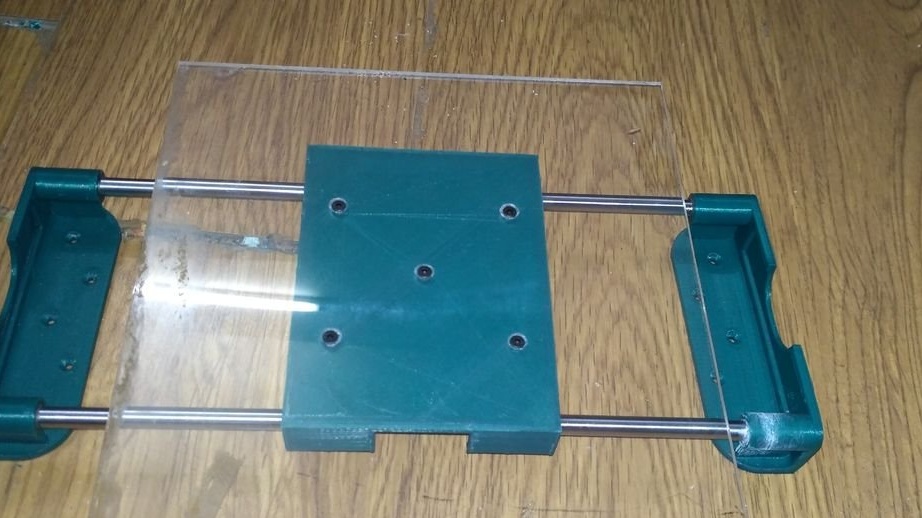
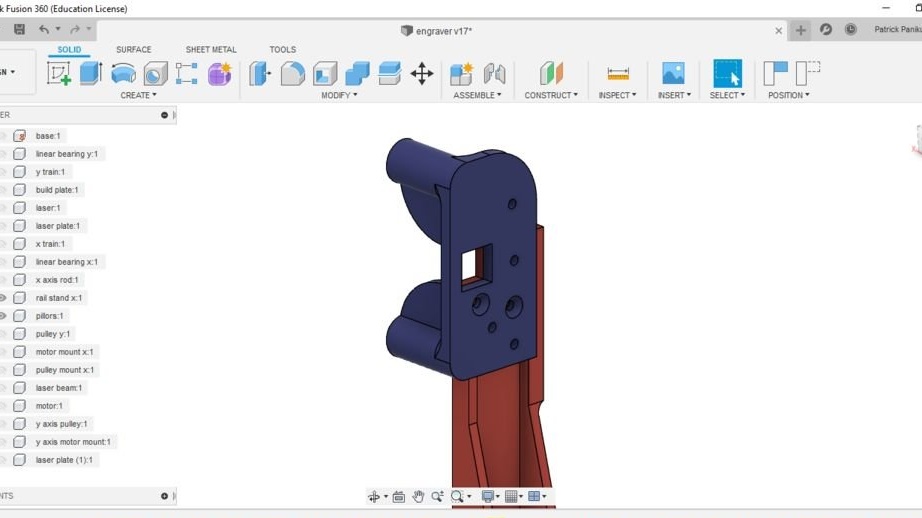
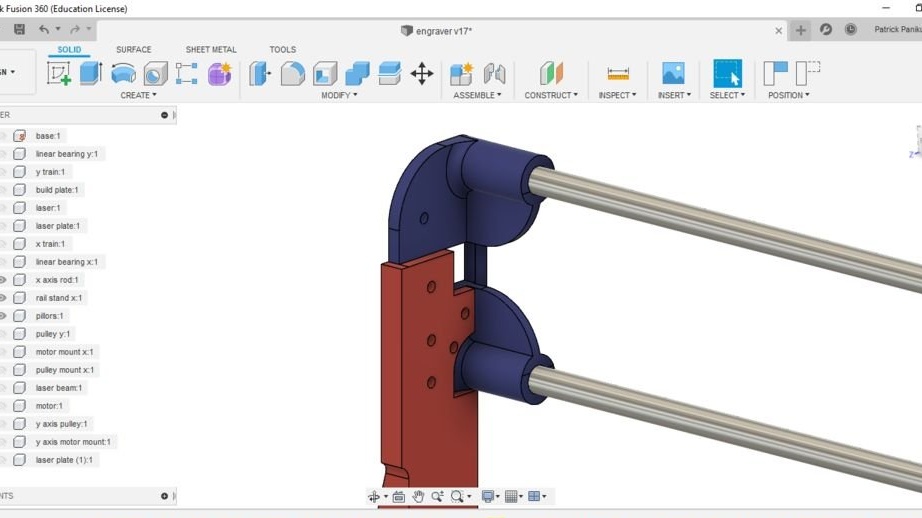
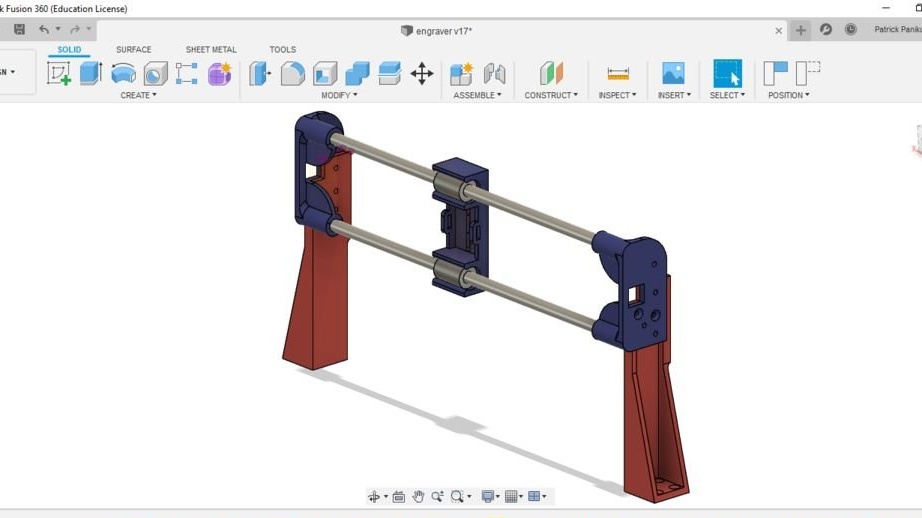
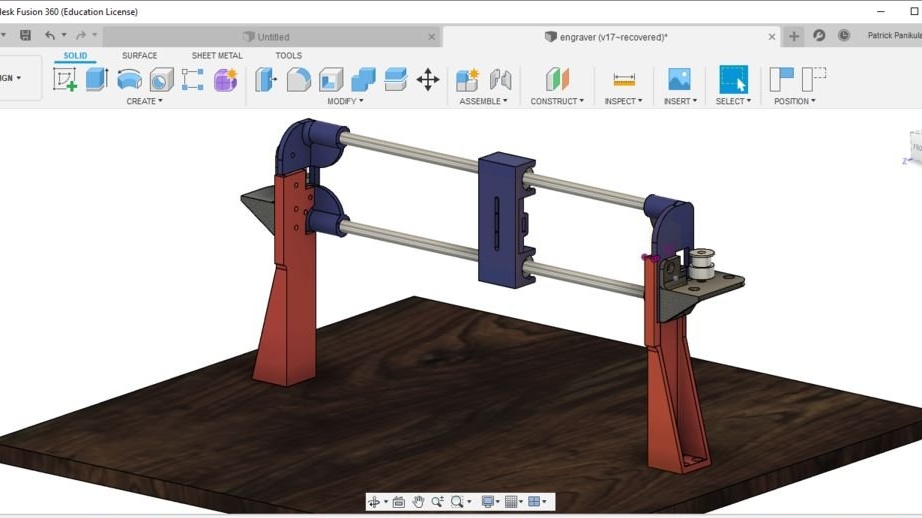
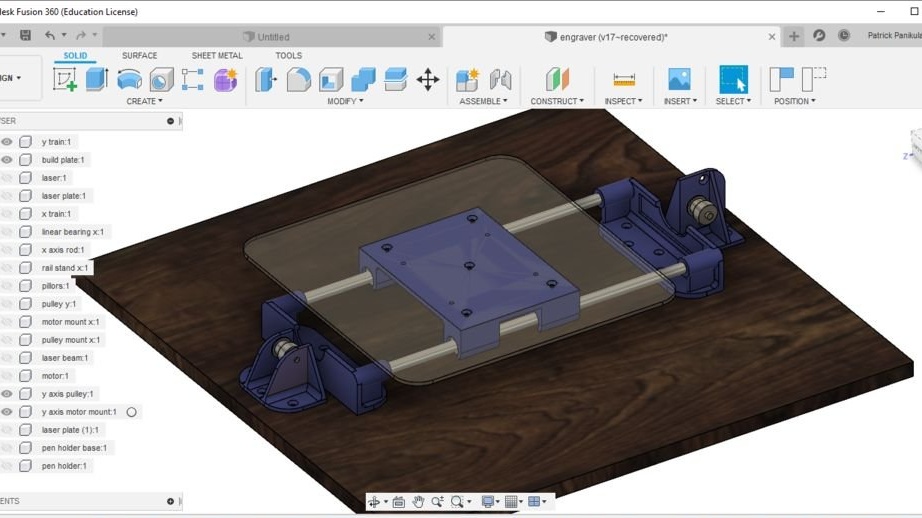
Βήμα πρώτο: Σχεδιασμός
Ο οδηγός ξεκίνησε σχεδιάζοντας τη βάση και τους υποδοχείς του άξονα του άξονα Y. Επειδή οι θήκες αποτελούνται από δύο ταυτόσημα εξαρτήματα, η λειτουργία καθρέφτη στο Fusion 360 διευκόλυνε την εργασία. Η λειτουργία καθρέφτη χρησιμοποιήθηκε αρκετές φορές στην ανάπτυξη αυτού του χαράκτη λέιζερ.Σε αντίθεση με άλλα λογισμικά CAD, ένα από τα σπουδαία χαρακτηριστικά του Fusion 360 είναι ότι σας επιτρέπει να δημιουργείτε πολλαπλά συστατικά σε μια οθόνη με μια σύνδεση με άλλα εξαρτήματα, δηλ. το μοντέλο μπορούν να σχεδιαστούν συναρμολογημένα.
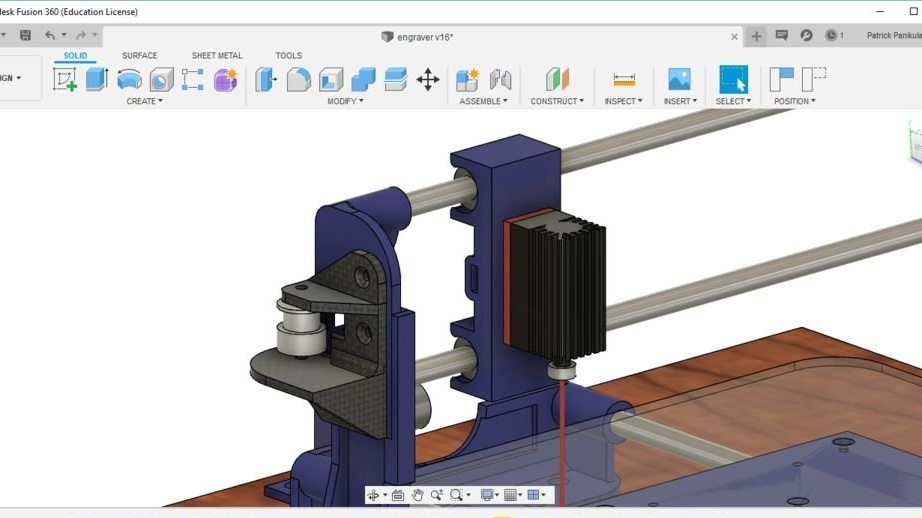
Το ύψος των οδηγών του άξονα Χ εξαρτάται από το εστιακό μήκος του χρησιμοποιούμενου λέιζερ. Απλά πρέπει να βεβαιωθείτε ότι το ύψος του λέιζερ βρίσκεται σε αυτό το εύρος. Η τελική εστίαση της δέσμης λέιζερ μπορεί να γίνει με ρύθμιση του φακού στο λέιζερ.
Το Fusion 360 σας επιτρέπει επίσης να επιλέξετε την εμφάνιση και το υλικό των εξαρτημάτων για να κάνετε την τελική εμφάνιση πραγματική. Το πρόγραμμα σάς επιτρέπει να μετατρέψετε και να αποθηκεύσετε εξελιγμένα στοιχεία απευθείας στη μορφή STL για εκτύπωση 3D.
Παρακάτω μπορείτε να κατεβάσετε το αρχείο Fusion 360 με το έργο χαράκτη.
χαράκτης λέιζερ v16.f3d
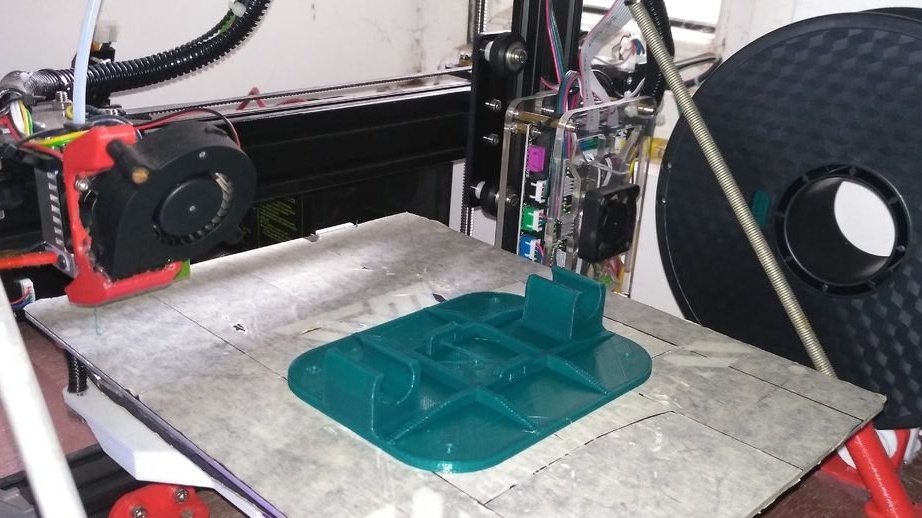
Βήμα δεύτερο: Εκτύπωση 3D
Στη συνέχεια, ο οδηγός αρχίζει να εκτυπώνει τις λεπτομέρειες. Όλα τα μέρη έχουν σχεδιαστεί κατά τέτοιο τρόπο ώστε να μπορούν εύκολα να εκτυπωθούν σε έναν εκτυπωτή 3D χωρίς υποστηρίγματα.
Ο οδηγός εκτυπώνει τις λεπτομέρειες σε έναν εκτυπωτή TEVO 3D.
Υλικό: PLA (Σκούρο Πράσινο)
Ύψος επιπέδου: 0,3 χιλιοστά
Συμπλήρωση: 30%
Πάχος τοιχώματος: 0,8 mm
Πάνω / Κάτω Πάχος: 0.9mm
Τα αρχεία για εκτύπωση μπορούν να μεταφορτωθούν κάνοντας κλικ σε αυτό τη σύνδεση.

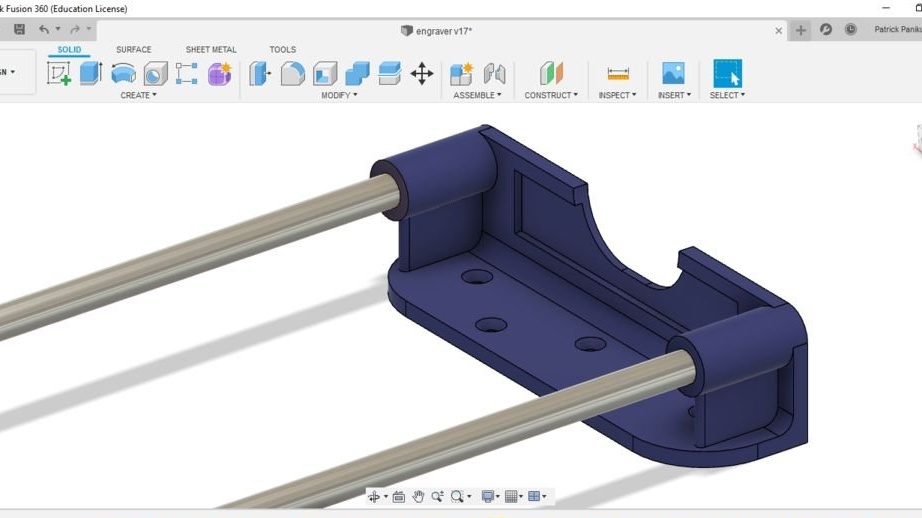
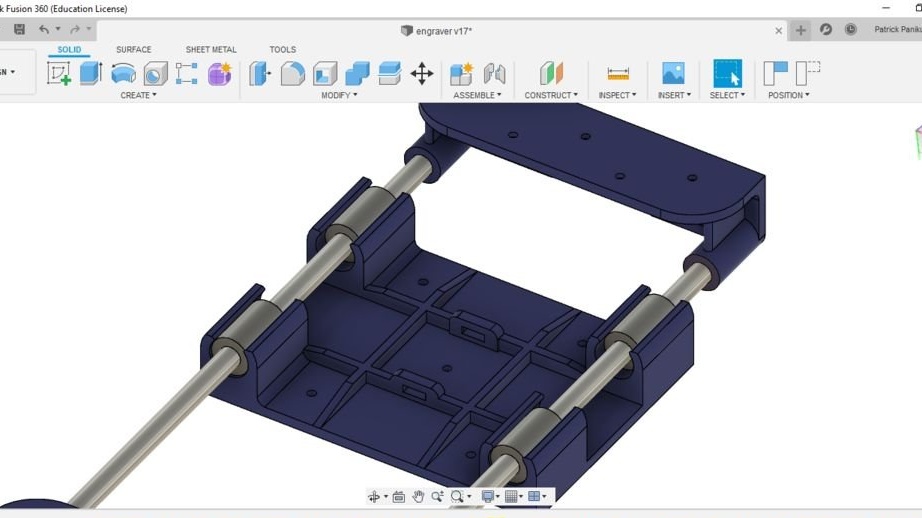
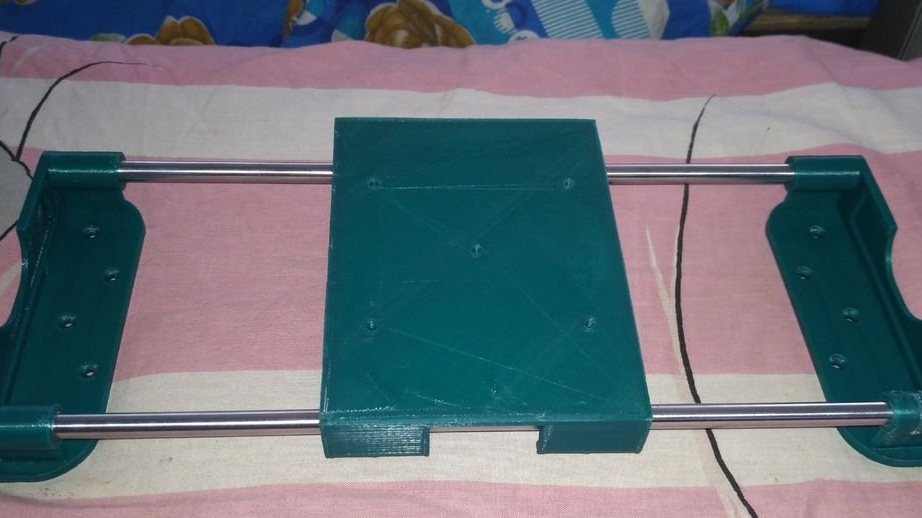
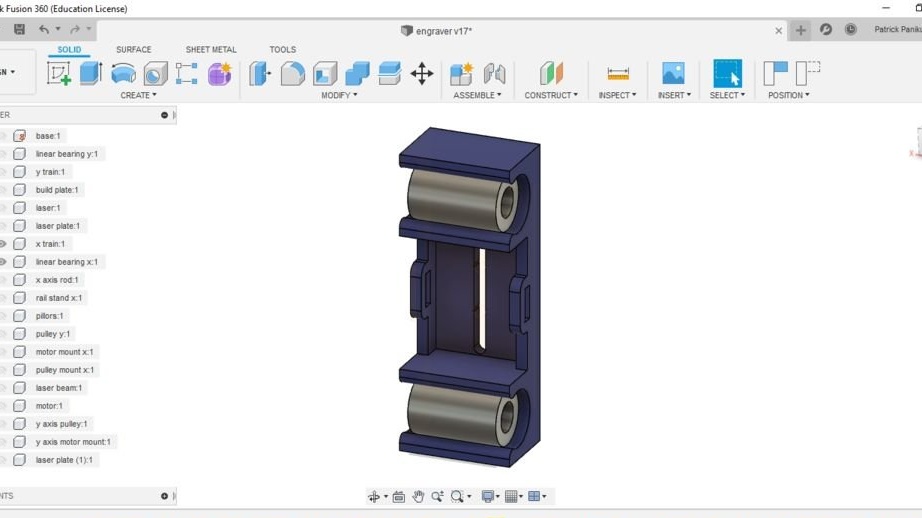
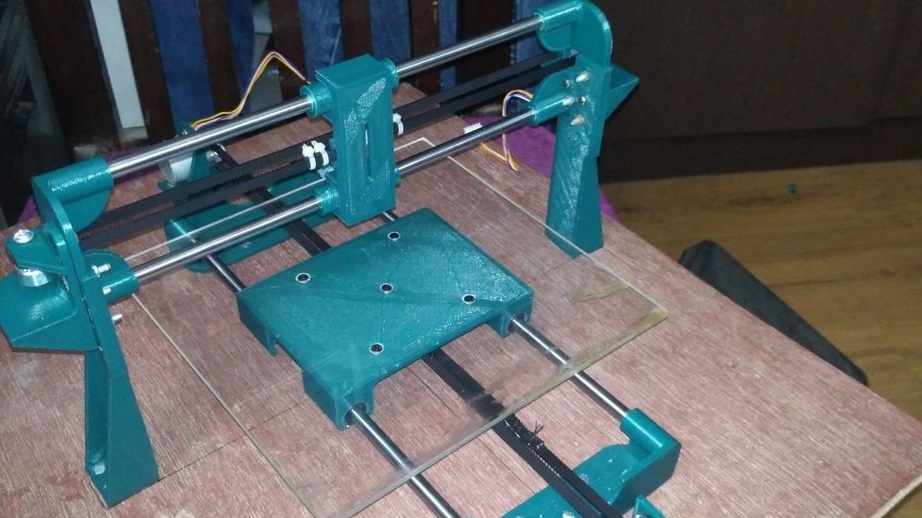
Βήμα τρίτο: Συναρμολόγηση του άξονα Υ
Ο οδηγός σας συμβουλεύει να ανοίξετε το αρχείο δημιουργίας PC Fusion 360 πριν από τη συναρμολόγηση. Αυτό βοηθά να γίνει κατανοητή η διαδικασία κατασκευής.
Ο οδηγός εγκαθιστά τις ράβδους και τα γραμμικά έδρανα. Ο κύριος σχεδιασμός έτσι ώστε να αποφεύγεται η κόλληση εξαρτημάτων, δηλ. η τοποθέτηση είναι σφιχτή. Οι ράβδοι πρέπει να γεμίσουν στο κάθισμα με ένα σφυρί.
Μετά τη συναρμολόγηση, βεβαιωθείτε ότι το κιβώτιο κινείται ελεύθερα.



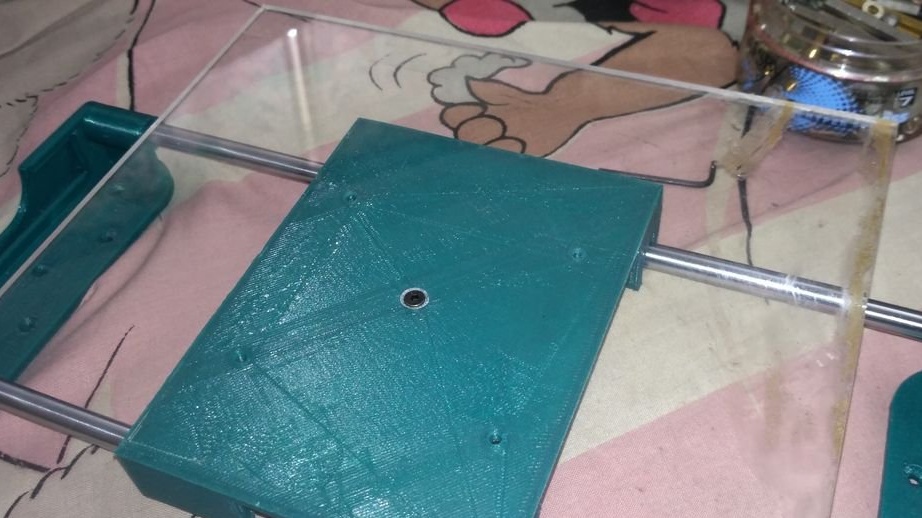
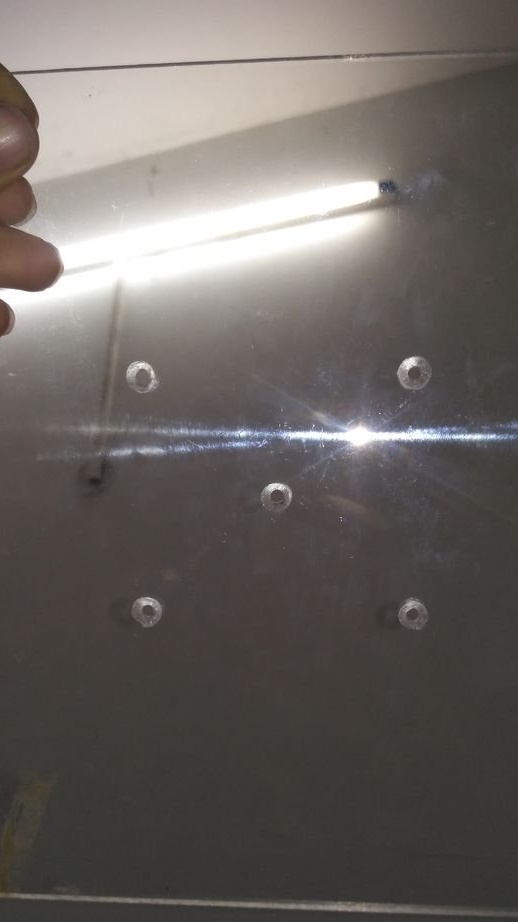
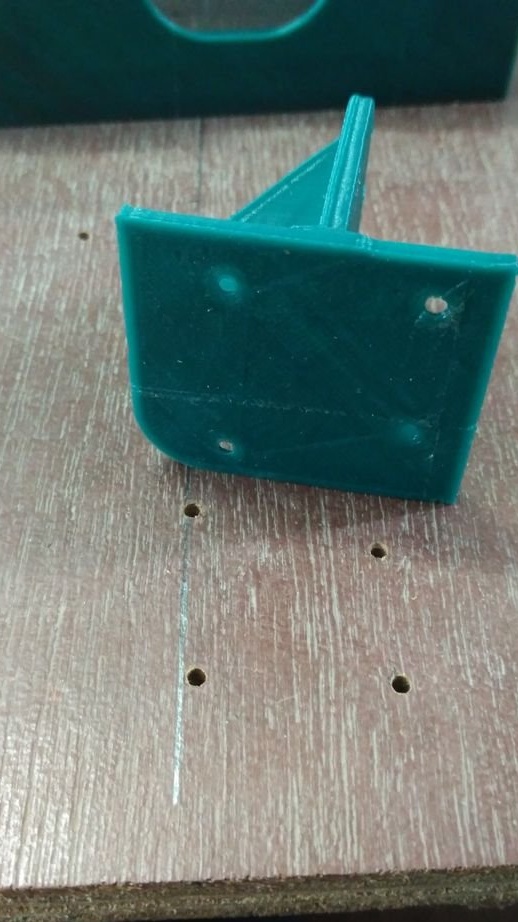
Βήμα τέσσερα: Επιφάνεια εργασίας
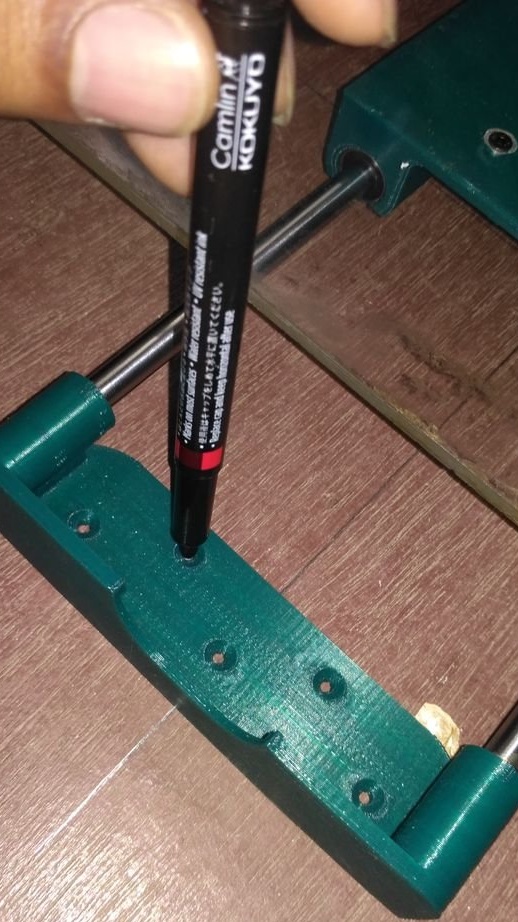
Μια τρύπα τρυπιέται σε ένα ακρυλικό φύλλο. Βιδώνει το φύλλο στο φορείο και ρυθμίζει τις άκρες του φύλλου ακριβώς παράλληλα με τις άκρες του φορείου. Σηματοδοτεί και τρυπά τέσσερις οπές τοποθέτησης. Βιδώνει ακρυλικό στο φορείο.





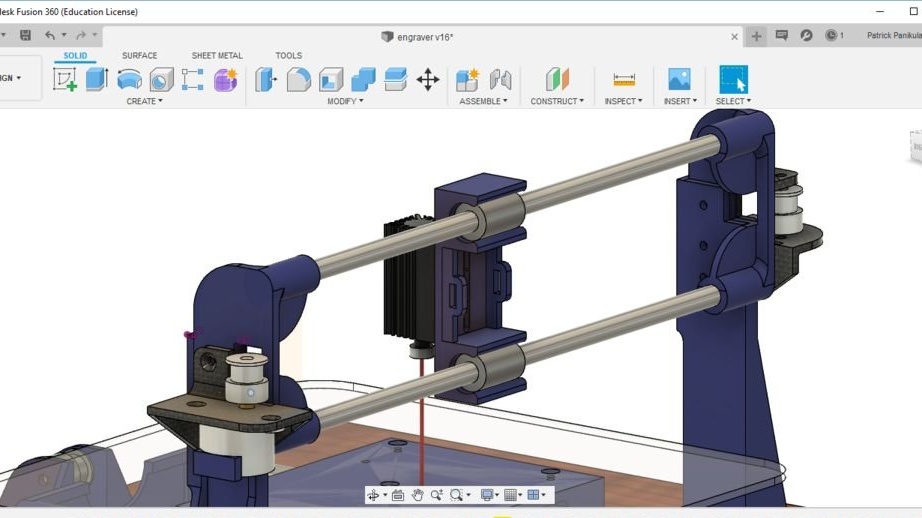
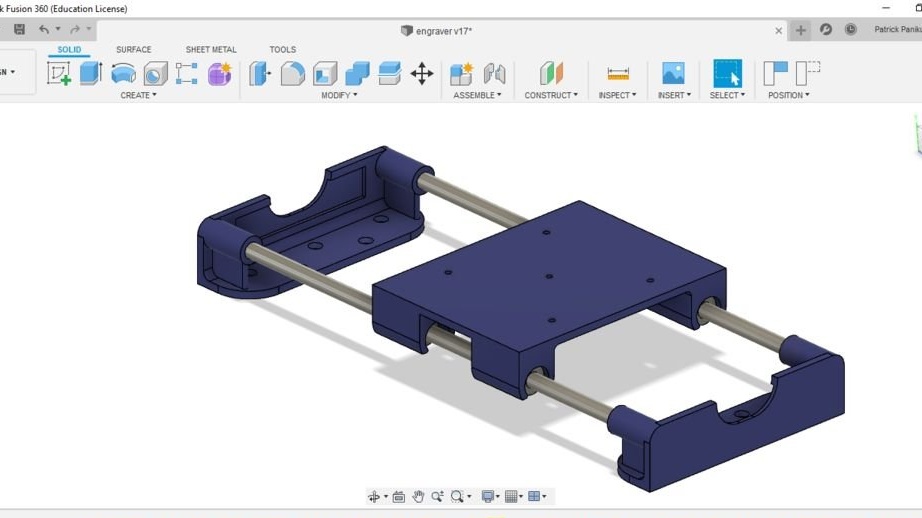
Βήμα πέντε: Χ άξονας
Στη συνέχεια, ο πλοίαρχος συγκεντρώνει τον άξονα Χ. Οι οδηγοί για τον άξονα εκτυπώθηκαν από τον πλοίαρχο, αφού αυτές που αγόρασε αποδείχθηκαν ελαττωματικές. Σύμφωνα με τον ίδιο, μετά από λείανση και λίπανση, αυτοί οι οδηγοί δουλεύουν όχι χειρότερα από τους αγορασμένους.





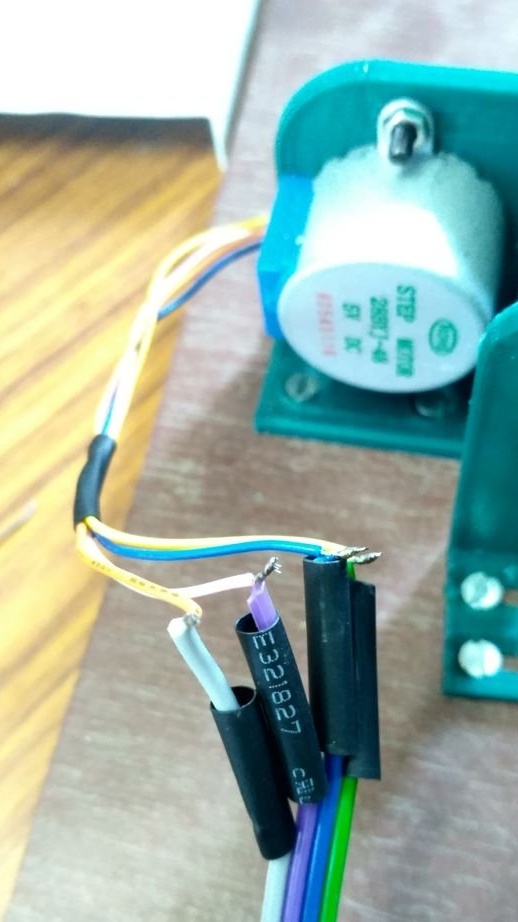
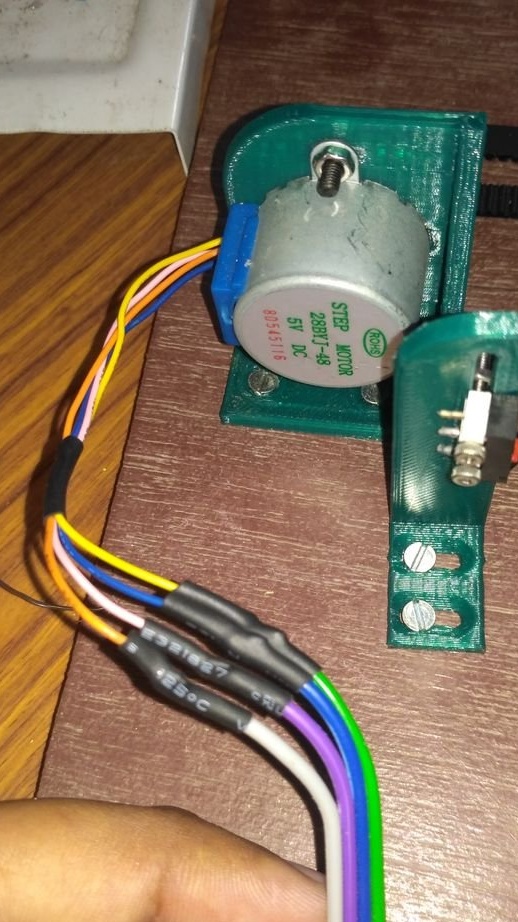
Βήμα έξι: αναδιαμόρφωση του μονοπολικού κινητήρα 28BYJ-48 σε διπολικό
Υπάρχουν δύο κύριοι λόγοι για τους οποίους πρέπει να μετατρέψετε έναν μονοπολικό κινητήρα σε έναν διπολικό κινητήρα.
Ο αλγόριθμος διπολικού ελέγχου κινητήρα με τη χρήση του οδηγού βηματικού κινητήρα A4988 είναι απλούστερος από τον έλεγχο ενός μονοπολικού κινητήρα
Η πλακέτα επέκτασης υποστηρίζει μόνο διπολικούς βηματικούς κινητήρες.
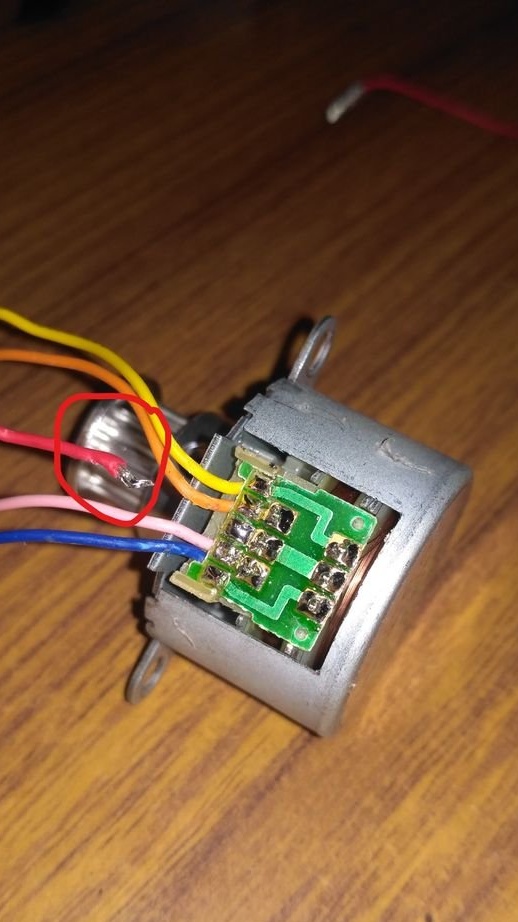
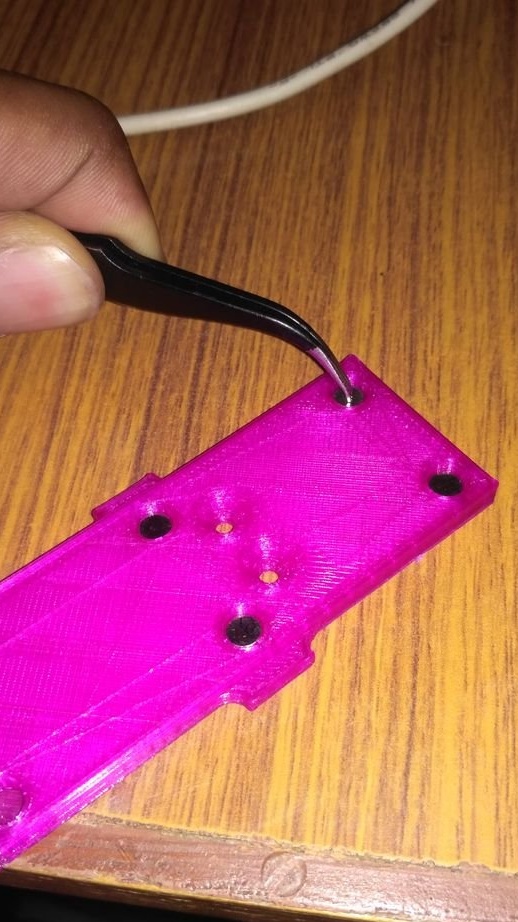
Μπορείτε να επανατοποθετήσετε τον κινητήρα σε τρία στάδια.
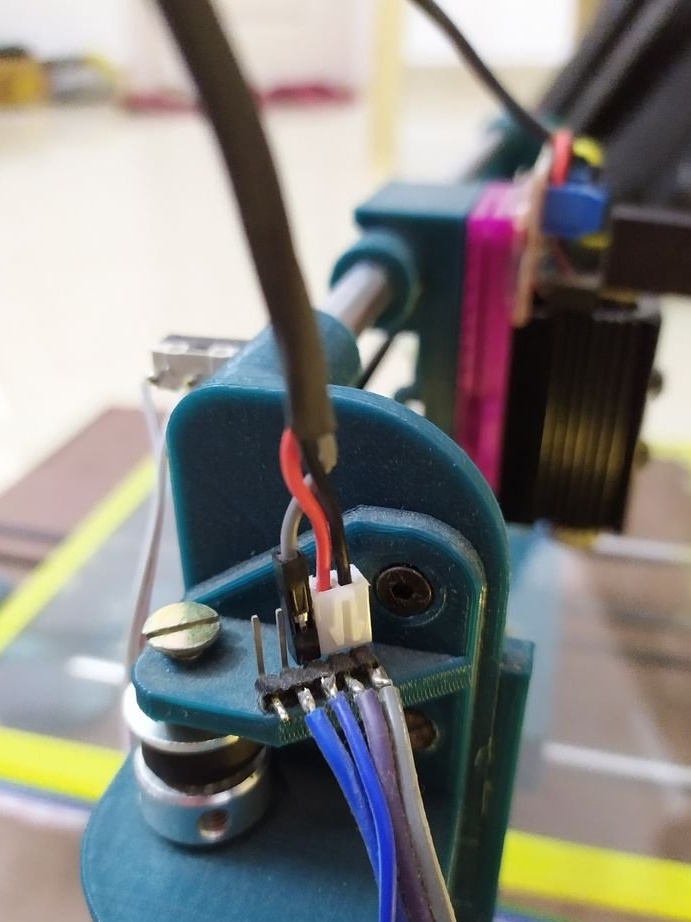
Ανοίξτε τη μπλε πλαστική θήκη, αποσυνδέστε το κόκκινο καλώδιο από την σανίδα, όπως φαίνεται στην πρώτη φωτογραφία.
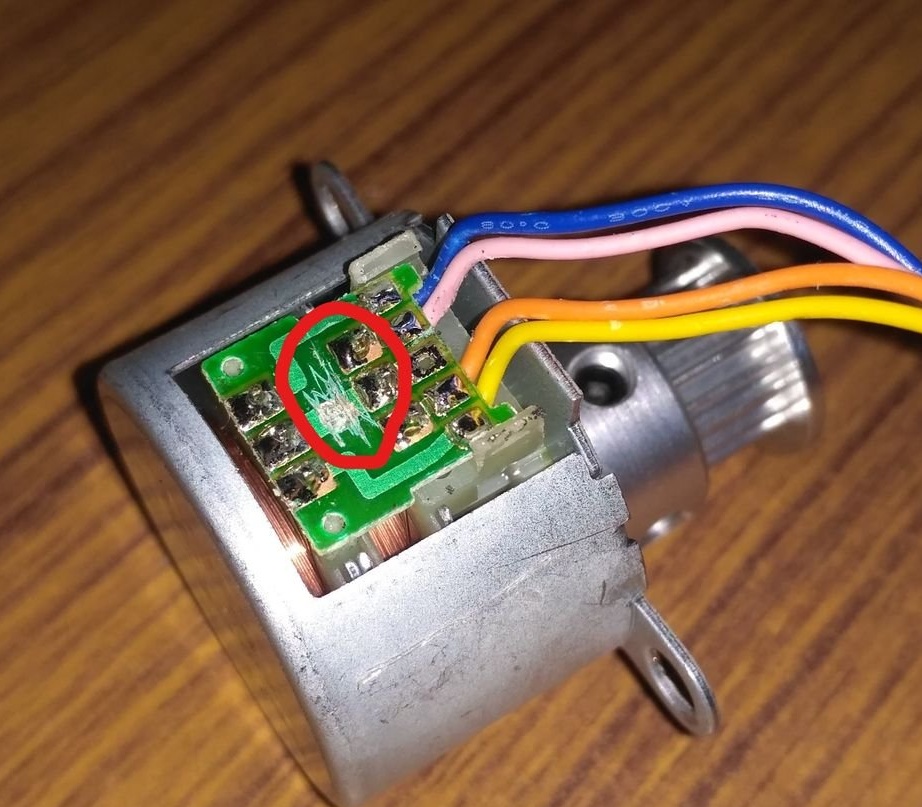
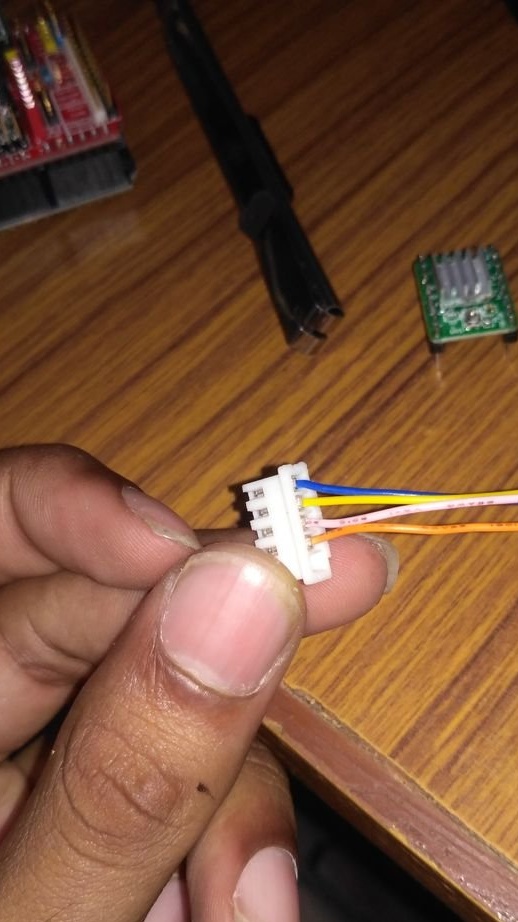
Τώρα πρέπει να βλάψετε το κομμάτι, όπως στη δεύτερη φωτογραφία και να αλλάξετε τα καλώδια στο μπλοκ, όπως στην τρίτη φωτογραφία.
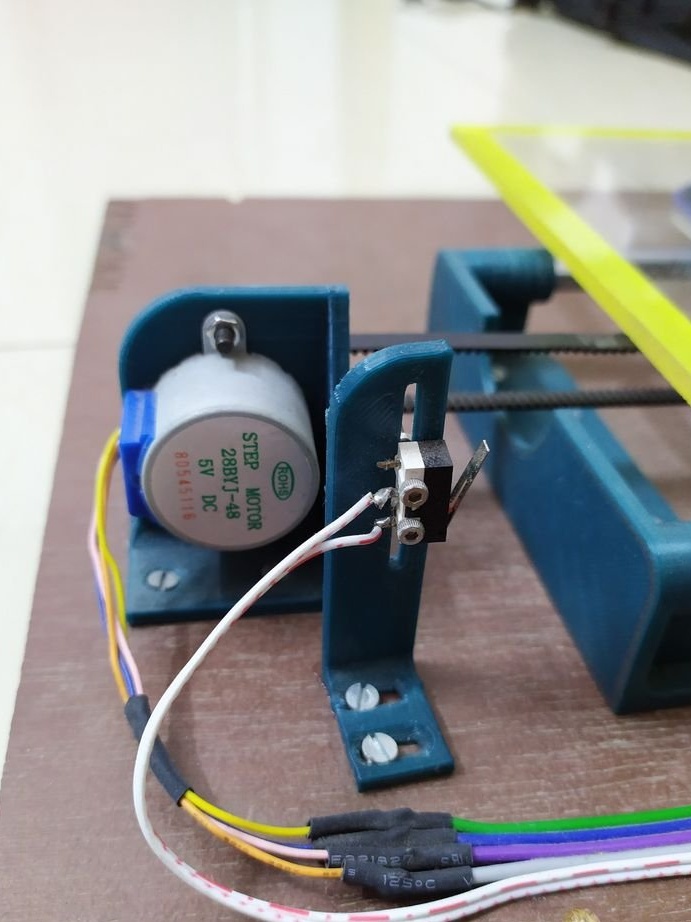
Έβδομο βήμα: Εγκατάσταση του κινητήρα, τροχαλίας, ζώνης
Εγκαθιστά τον κινητήρα. Ένας κινητήρας ασφαλίζει μια τροχαλία στον άξονα. Η δεύτερη τροχαλία τοποθετείται στην αντίθετη πλευρά του κινητήρα. Στερεώνει το άκρο της ζώνης με δεσμούς. Περάσει το δεύτερο άκρο του ιμάντα μέσω των τροχαλιών και επίσης στερεώνεται.



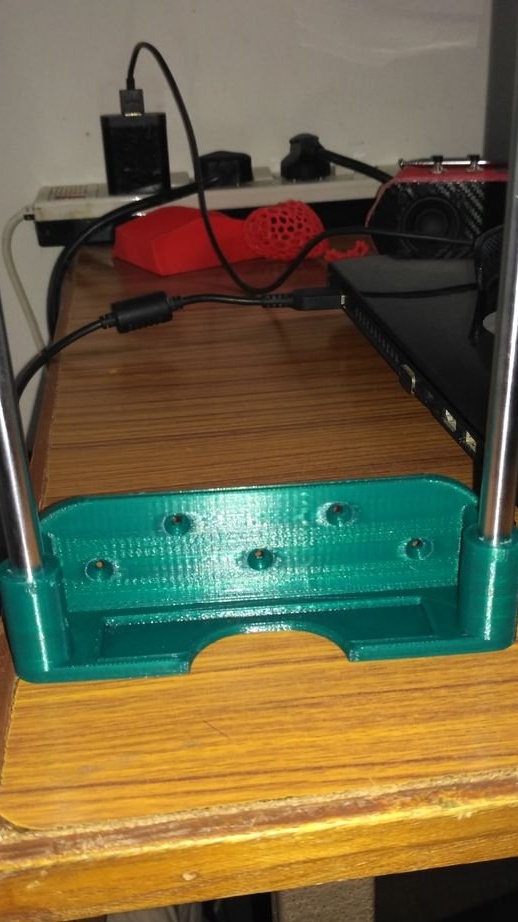
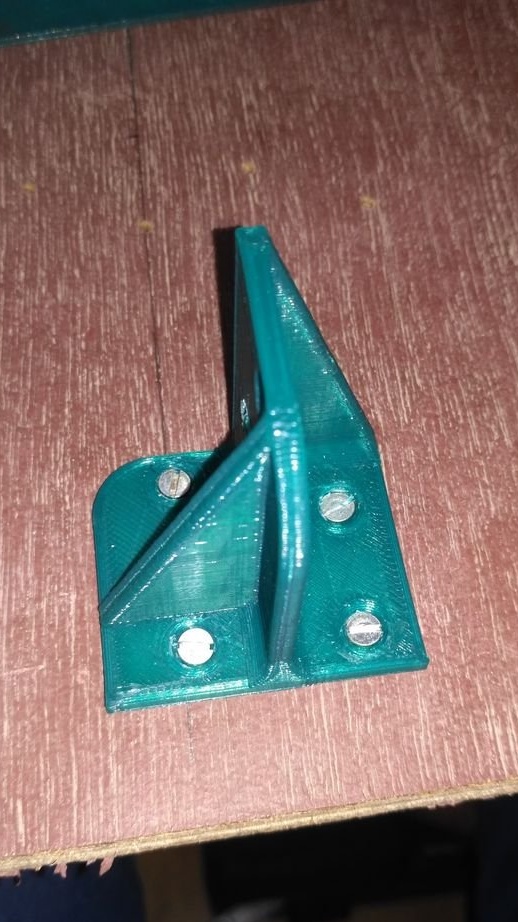
Βήμα Οκτώ: Ίδρυμα
Η βάση είναι κατασκευασμένη από κόντρα πλακέ. Σε αυτόν, ο πλοίαρχος συνδέει τον άξονα Χ.







Βήμα εννέα: Άξονας Υ
Συλλέγει τον άξονα Y. Αυτό είναι ένα δύσκολο βήμα.
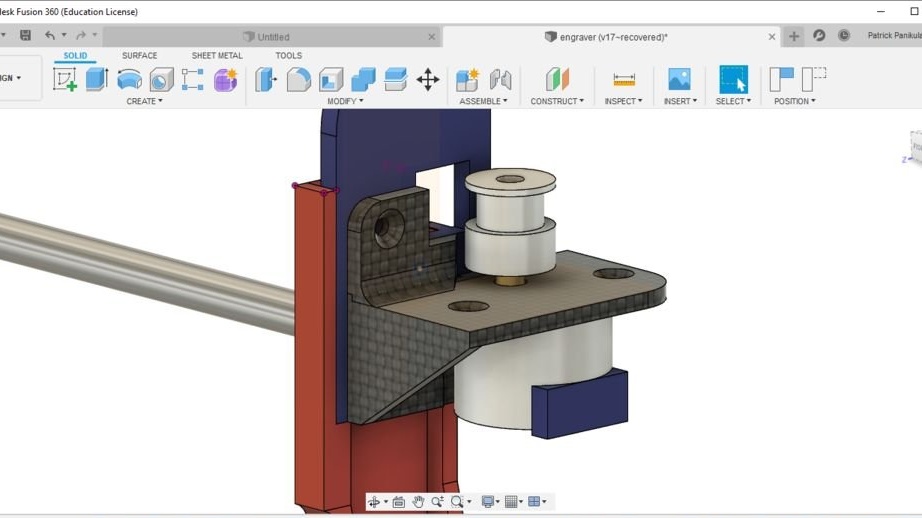
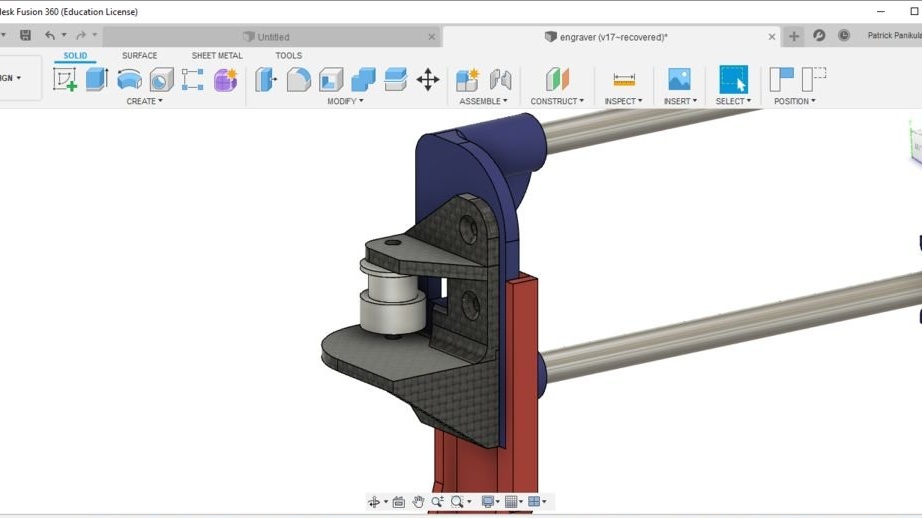
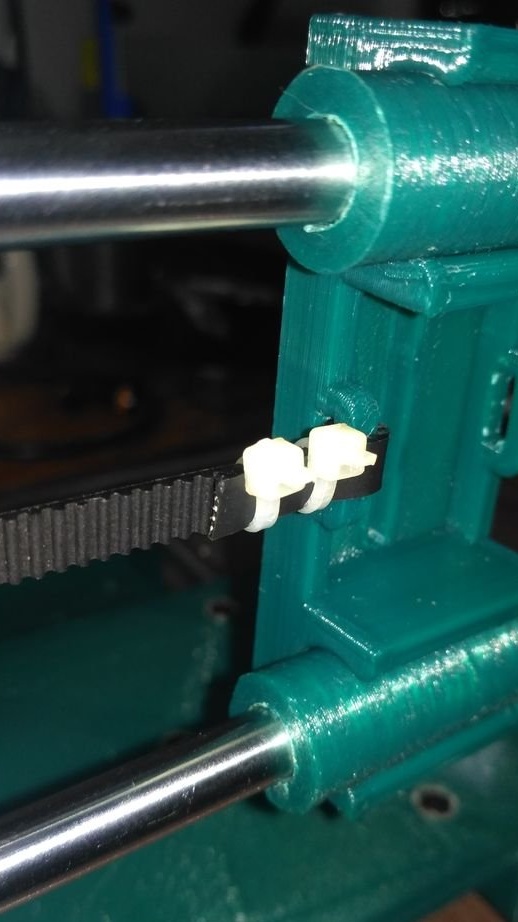
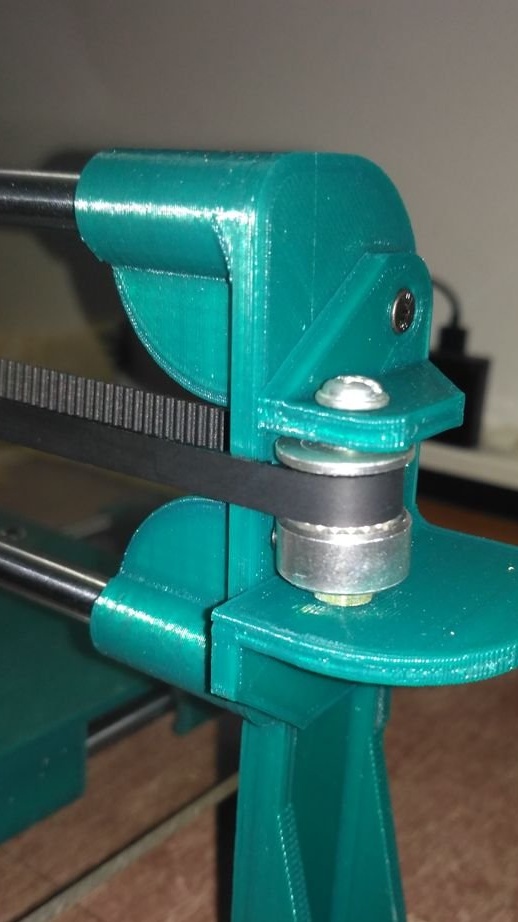
Συναρμολογήστε τη θήκη της τροχαλίας χρησιμοποιώντας το στήριγμα της τροχαλίας του άξονα Υ, τροχαλία, μπουλόνι / παξιμάδι 40 mm M4 και μεταλλικές ροδέλες, όπως φαίνεται στις δύο πρώτες φωτογραφίες.


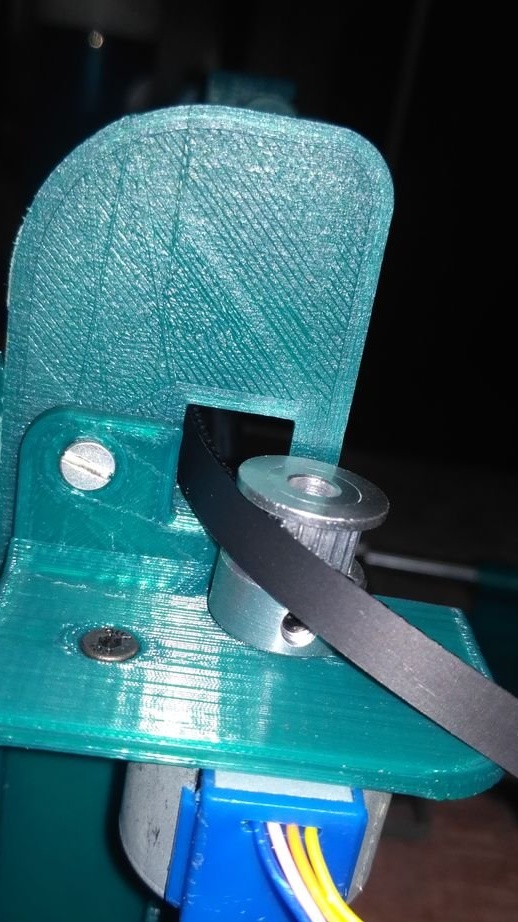
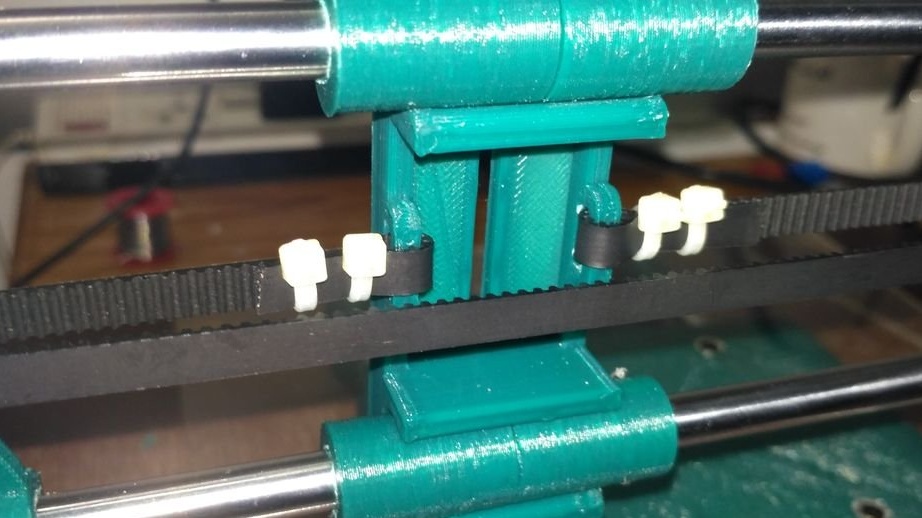
Τώρα συνδέστε το ένα άκρο του ιμάντα χρονισμού σε μια από τις σχισμές κάτω από τον φορέα άξονα Υ.
Σύρετε το ελεύθερο άκρο του ιμάντα μέσω του συγκροτήματος τροχαλίας που κάνατε νωρίτερα και, στη συνέχεια, ασφαλίστε το στη δεύτερη αυλάκωση που βρίσκεται κάτω από το φορείο του άξονα Υ.
Αφού ολοκληρωθούν αυτά τα 3 βήματα, πρέπει να βιδώσετε τη συναρμολόγηση του άξονα Y στη βάση κόντρα πλακέ.



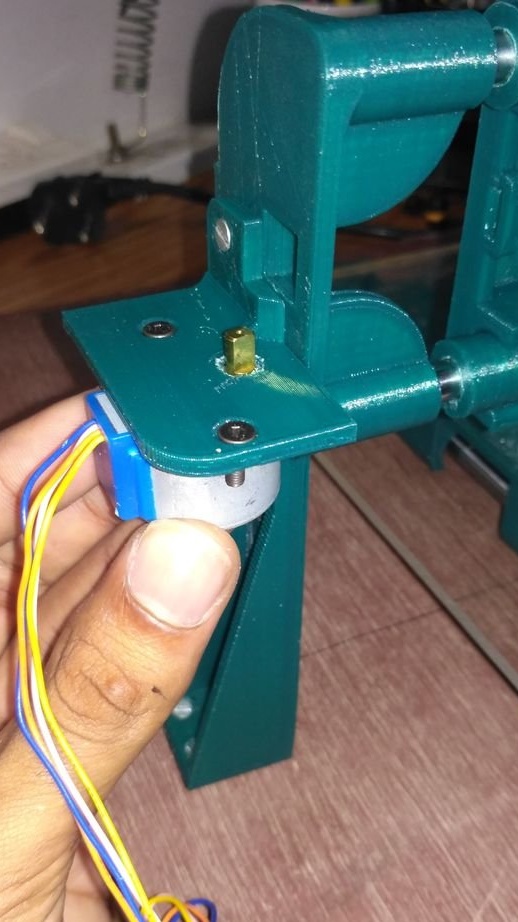
Συνδέστε το βηματικό μοτέρ στη βάση του κινητήρα του άξονα Υ χρησιμοποιώντας δύο βίδες και παξιμάδια 12 mm M3.
Τώρα βιδώστε την υποδοχή τροχαλίας του άξονα Υ και τη βάση του κινητήρα στη βάση κόντρα πλακέ.Κάνετε αυτό αφού ρυθμίσετε και τις δύο πλευρές για να έχετε τη σωστή τάση του ιμάντα. Ένας εντατήρας ζώνης θα προστεθεί αργότερα.

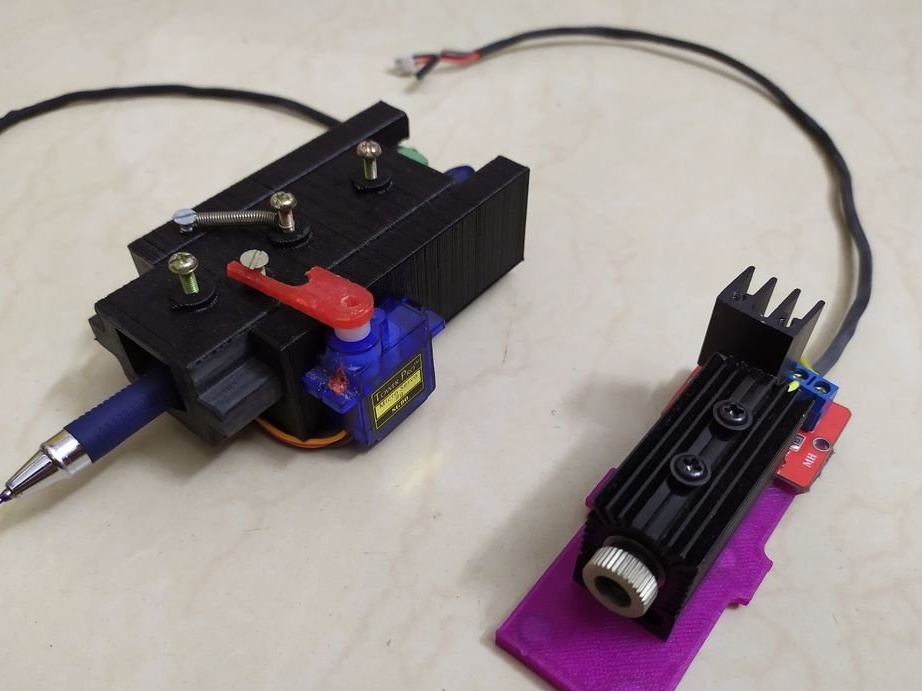
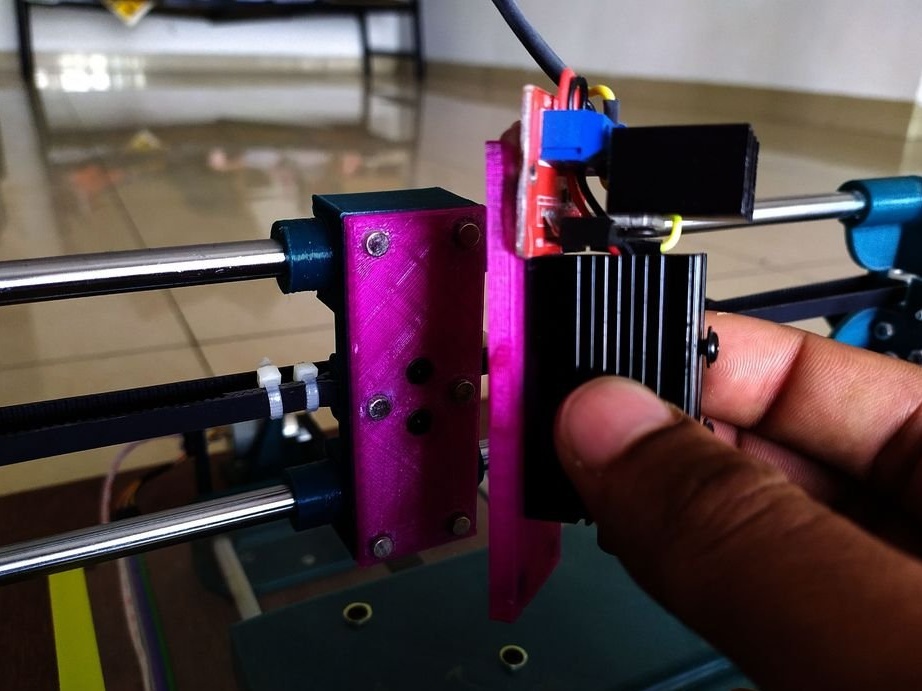
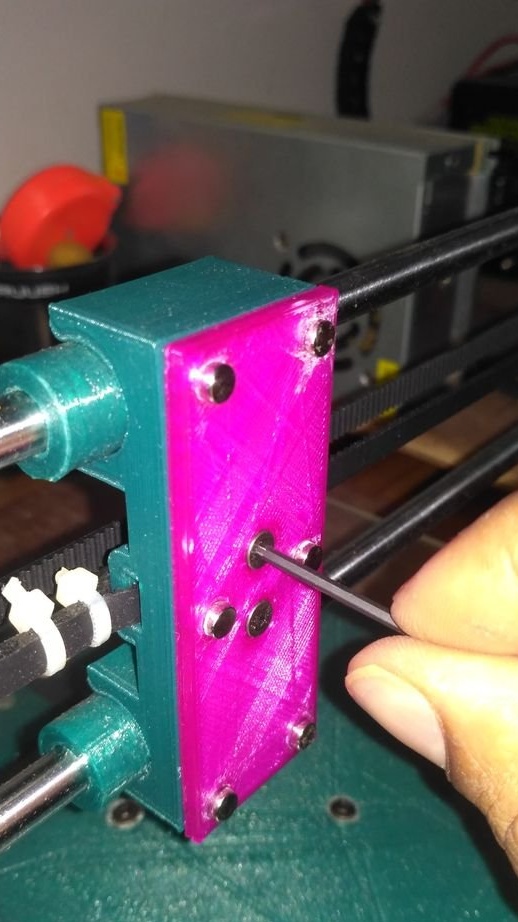
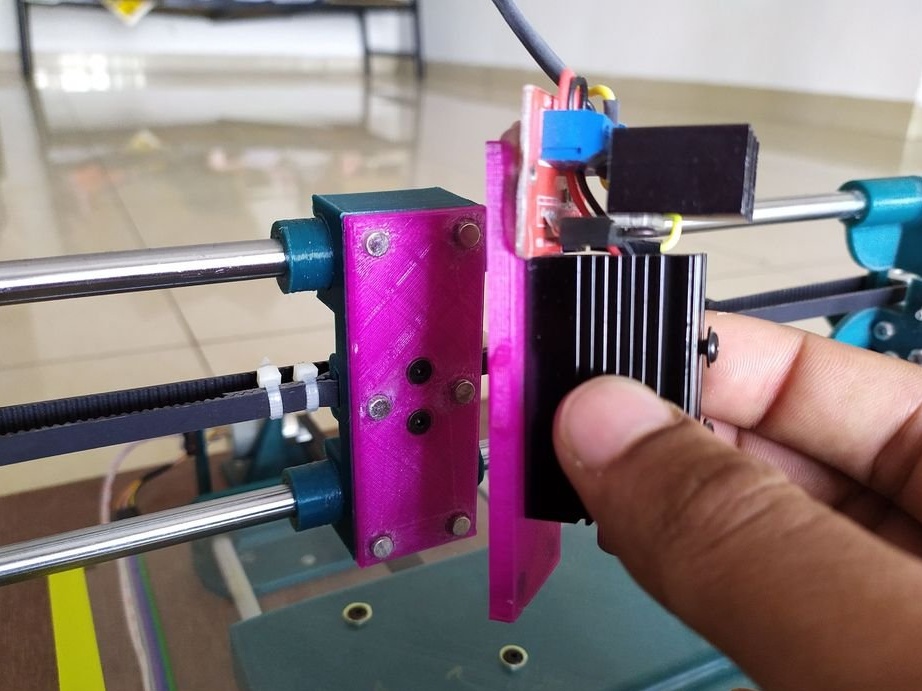
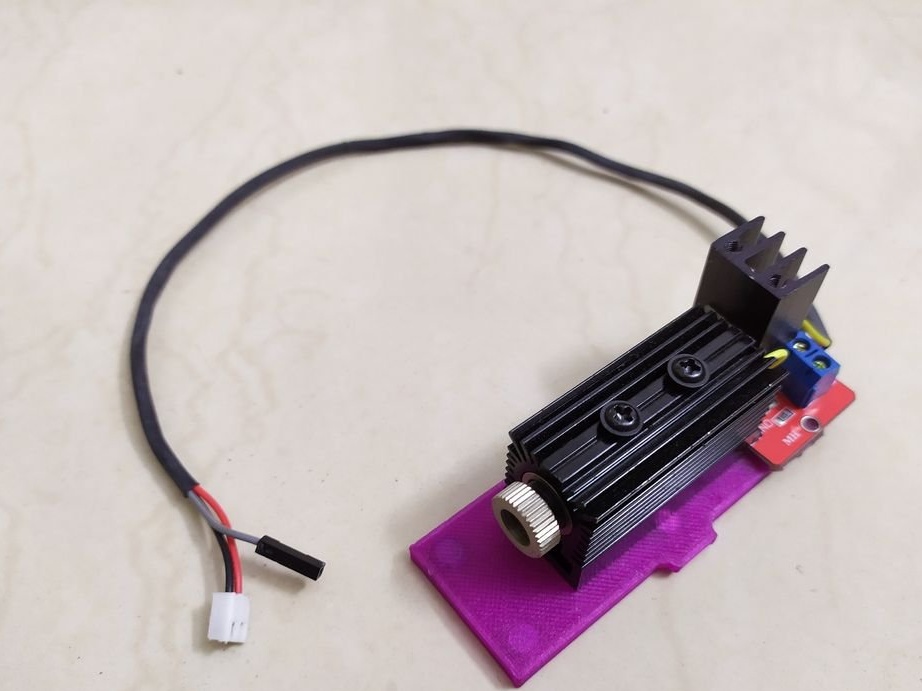
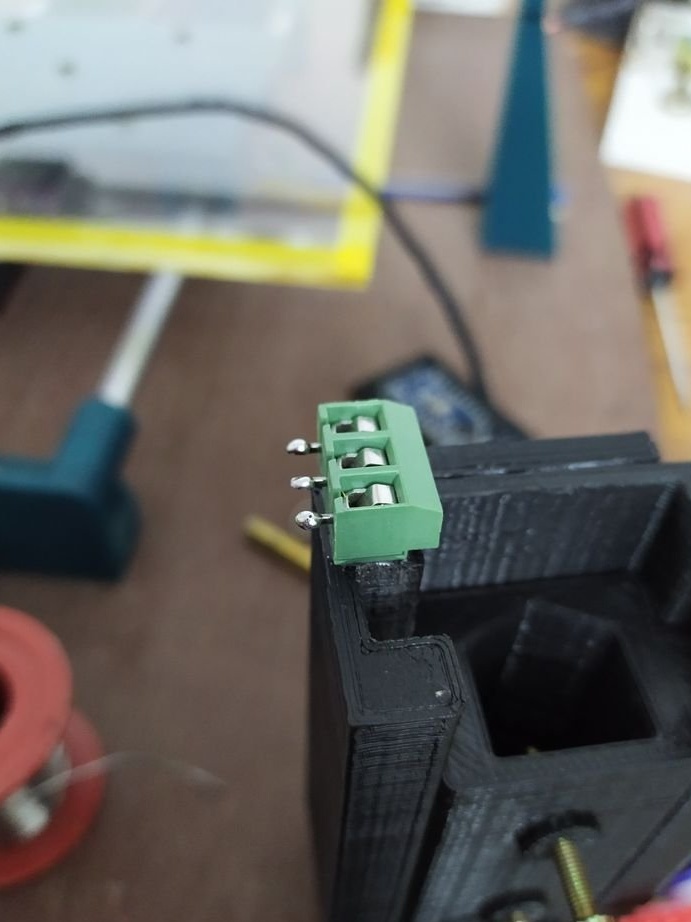
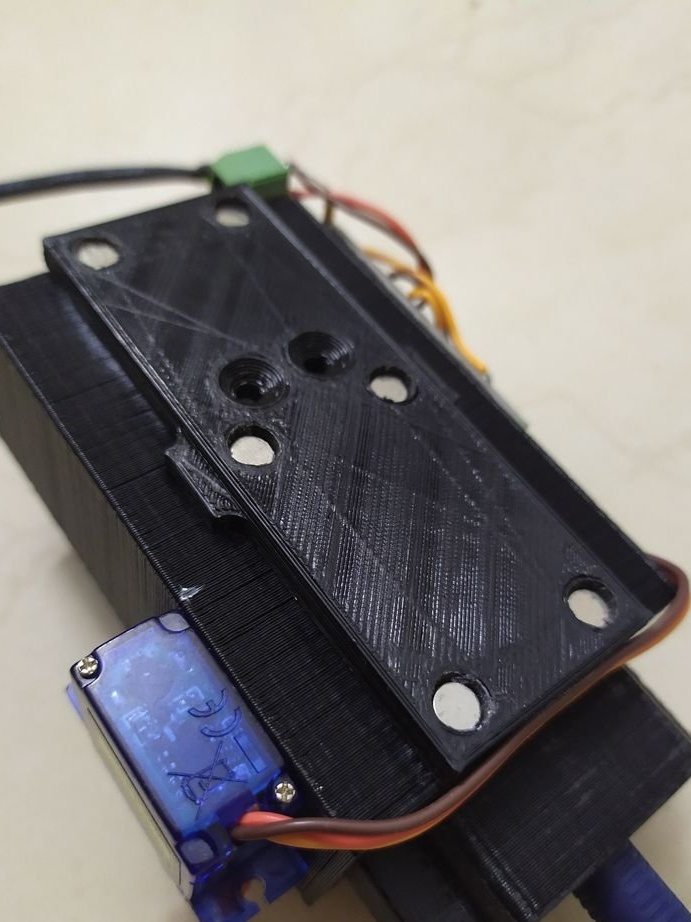
Βήμα δέκα: Μονάδα λέιζερ
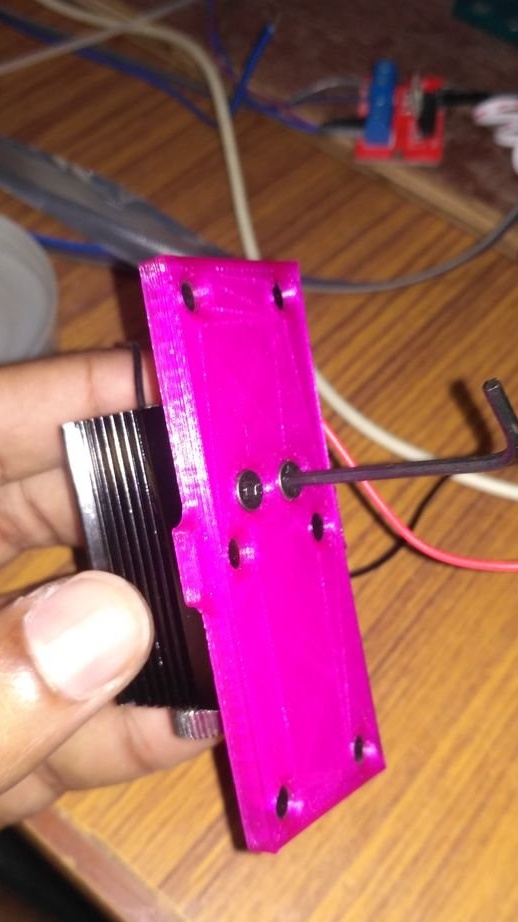
Όπως υποδείχθηκε, στις προδιαγραφές, το μηχάνημα εφάρμοσε μια γρήγορη αντικατάσταση της μονάδας λέιζερ με άλλες εκτελεστικές μονάδες. Για αυτό, ο πλοίαρχος έκανε δύο ορθογώνια τμήματα (καλύμματα). Έξι μαγνήτες νεοδυμίου είναι εγκατεστημένοι σε κάθε ένα. Ένα κάλυμμα συνδέεται με τον άξονα Χ, η μονάδα λέιζερ συνδέεται με την άλλη.
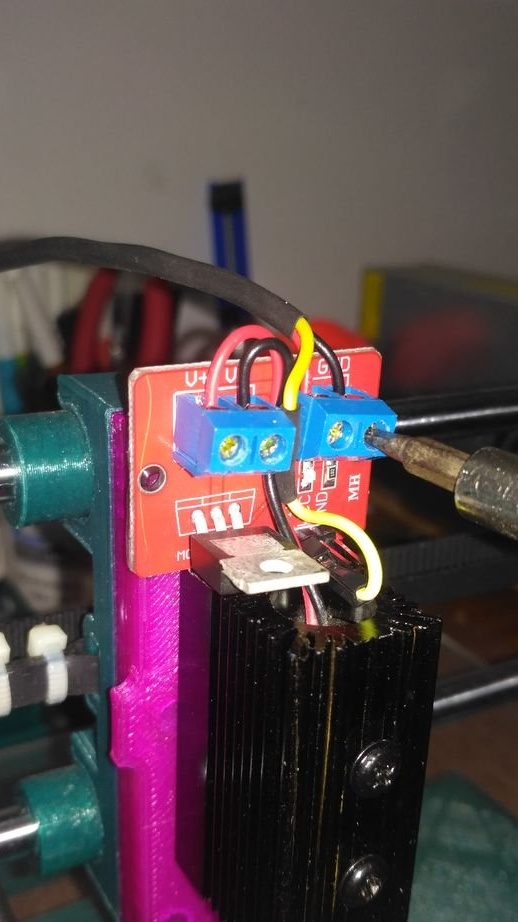
Τα καλώδια τοποθετούνται ως εξής.
+ και - λέιζερ συνδέονται με τα V + και V-, αντίστοιχα, της μονάδας MOSFET. Η τροφοδοσία συνδέεται με VCC και GND αντίστοιχα. Το καλώδιο σήματος συνδέεται με τον ακροδέκτη σήματος της μονάδας MOSFET.




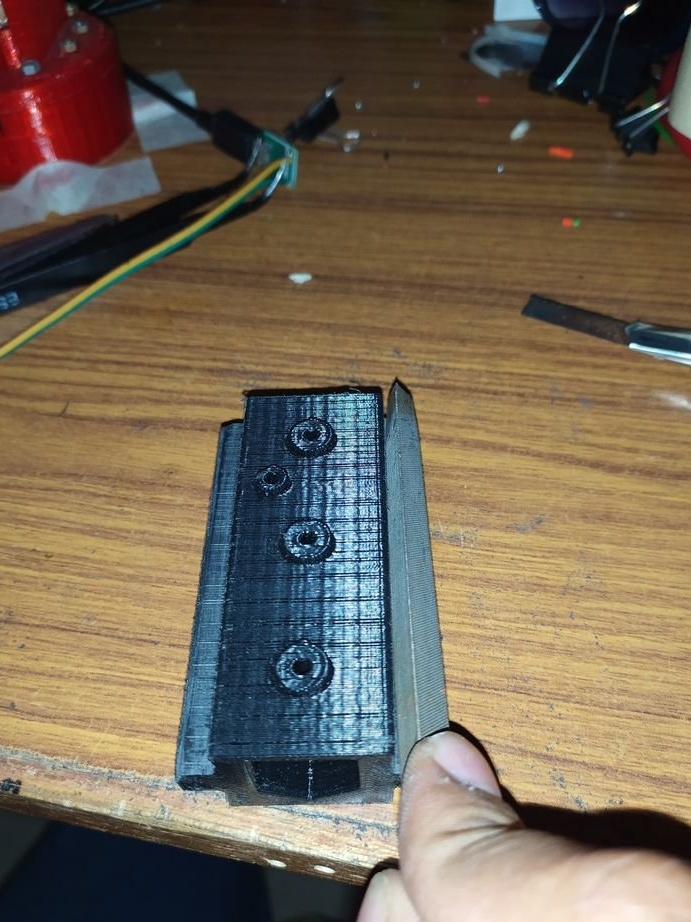
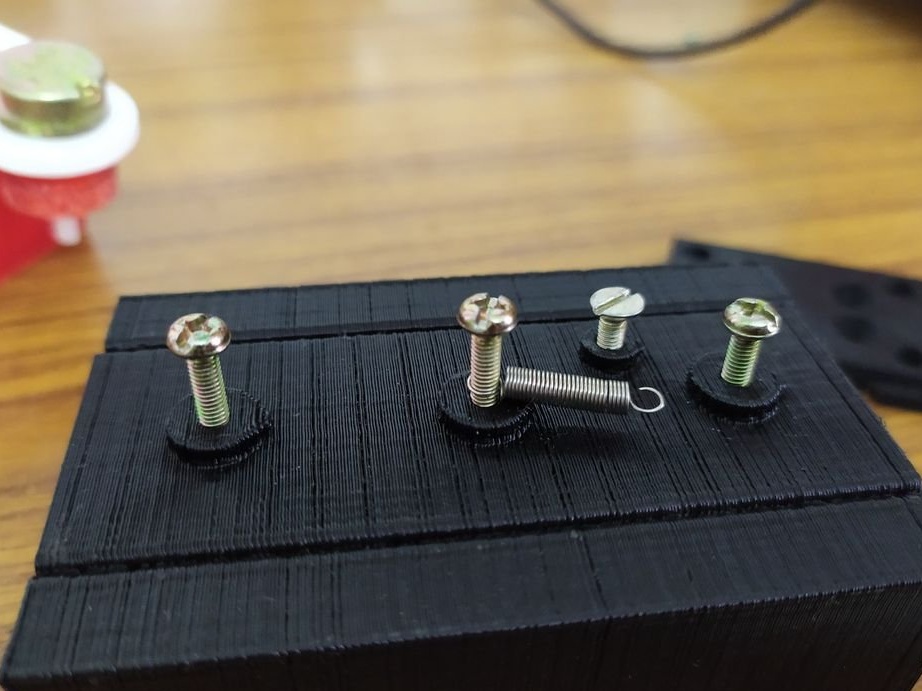
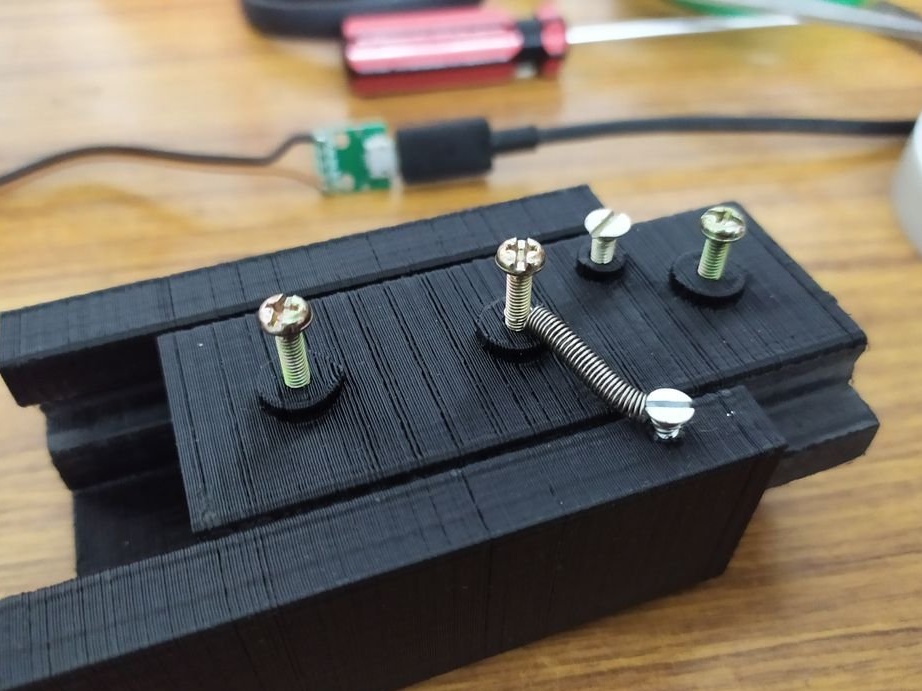
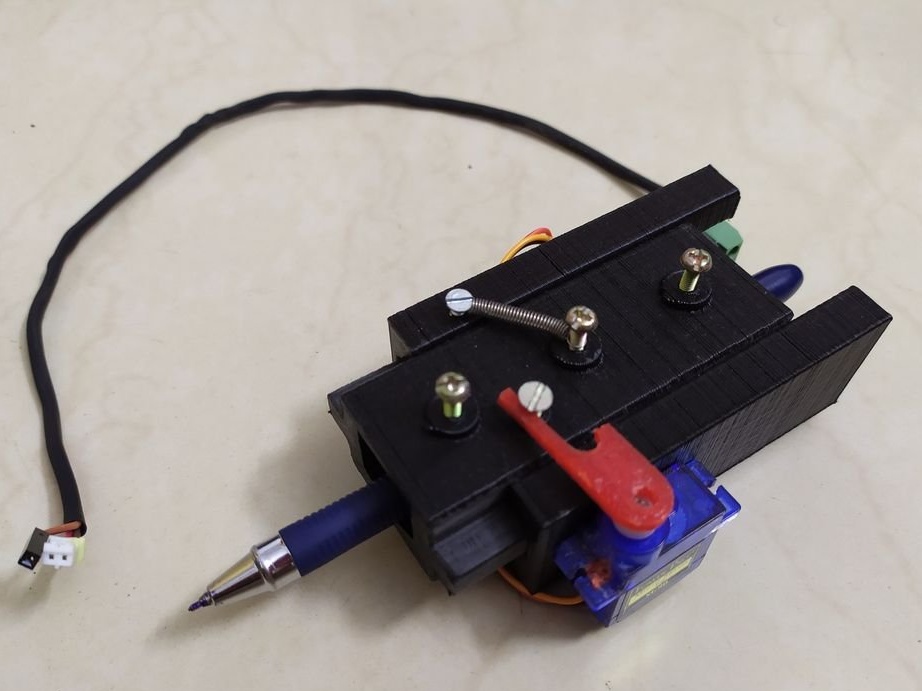
Βήμα έντεκα: plotter
Συλλέγει έναν plotter. Μόλις εκτυπωθούν και τα δύο μέρη, ο πλοίαρχος στίλβει τα επίπεδα που έρχονται σε επαφή μεταξύ τους, τα εξομαλύνει με ένα αρχείο και γυαλόχαρτο, μέχρις ότου και τα δύο μέρη να γλιστρήσουν μαζί με ελάχιστη τριβή.



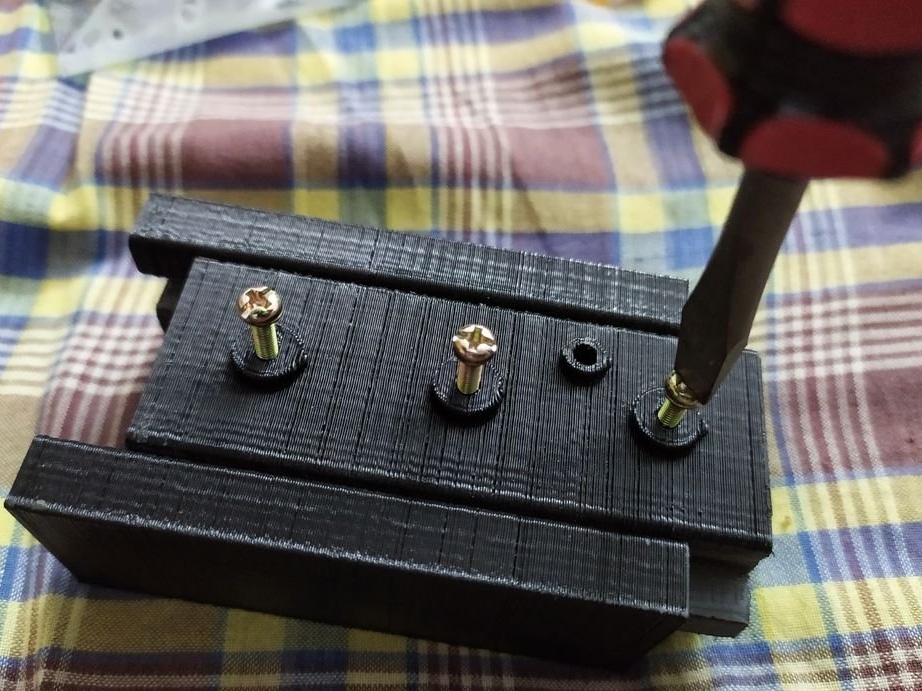
Σφίξτε τώρα τις βίδες 40 mm M3 και ρυθμίστε το ελατήριο.
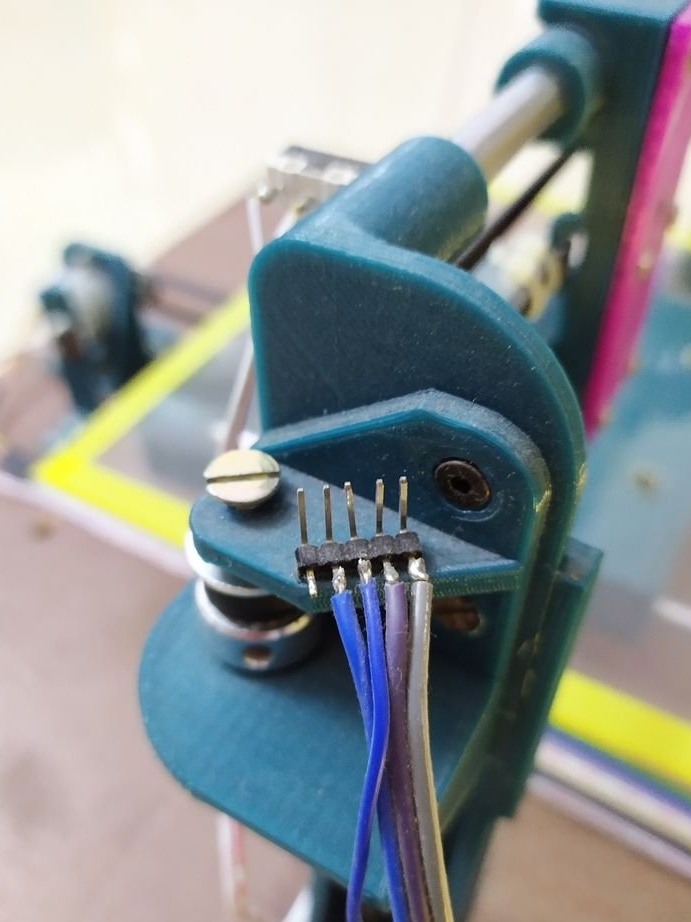
Ο σερβοκινητήρας, οι ακροδέκτες και το Arduino κολλούν όπως φαίνεται στη φωτογραφία.
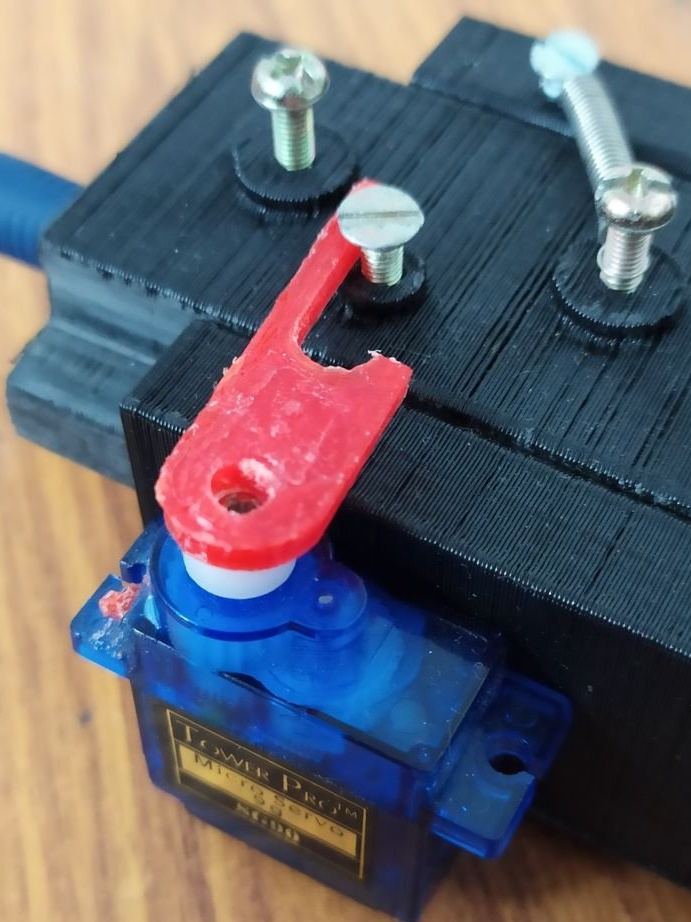
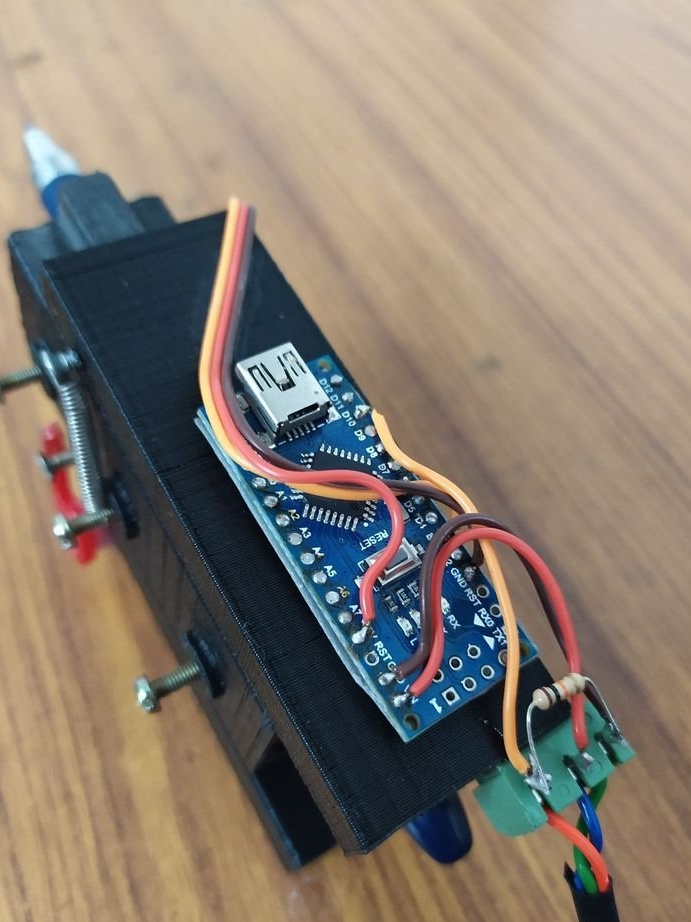
Εδώ Arduino Το nano χρησιμοποιείται για τη μετατροπή των σημάτων ελέγχου λέιζερ σε σήματα PWM που μπορούν να οδηγήσουν έναν μικροκινητήρα.
Συνδέεται ως εξής:
+5 Volt - Vin
-5 Volt - GND
Σήμα - D10
Σέρβο ισχύς + ve - 5V
Σερβοκινητήρας -ve - GND
Σέρβο σήμα - D3
Στη συνέχεια, φορτώνεται ο κώδικας.
#include Servo myservo;
void setup ()
{
myservo.attach (3);
pinMode [10, είσοδος];
}}
κενός βρόχος ()
{
εάν (digitalRead (10) == HIGH)
{
myservo.write (20);
}}
αλλού
{
myservo.write (60);
}}
}}
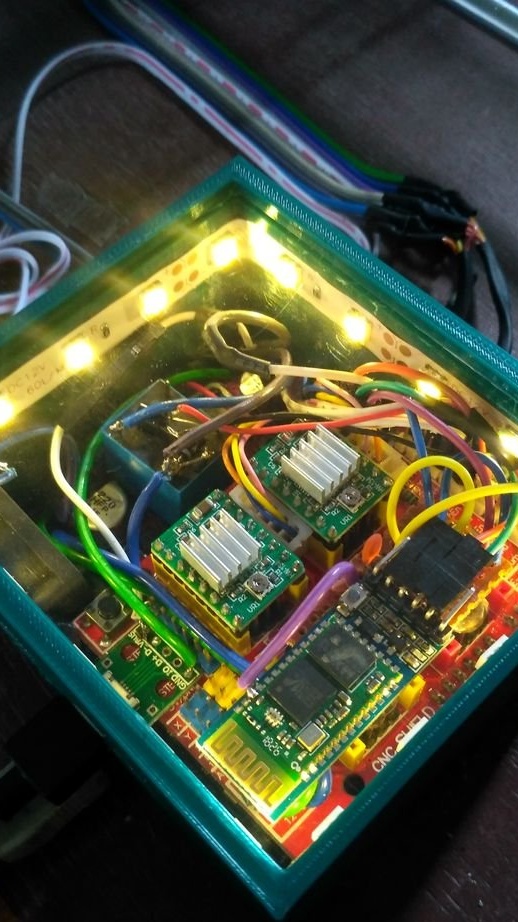
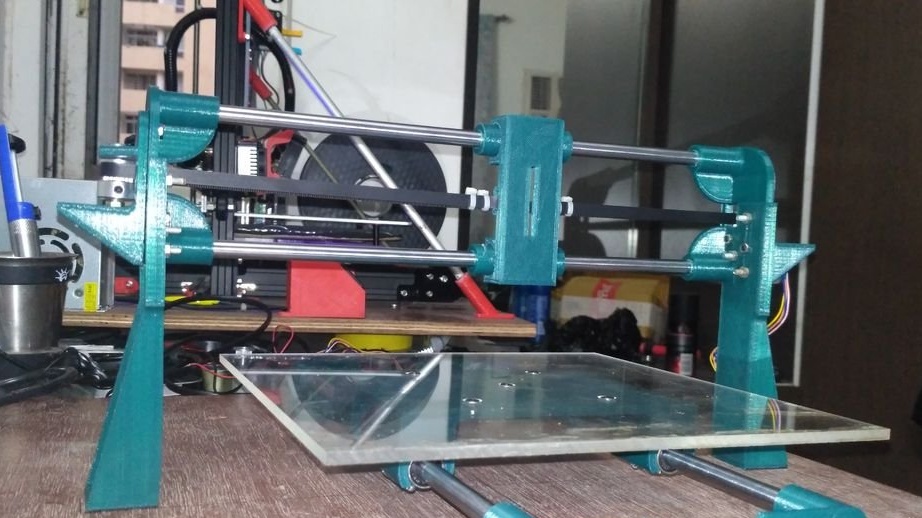
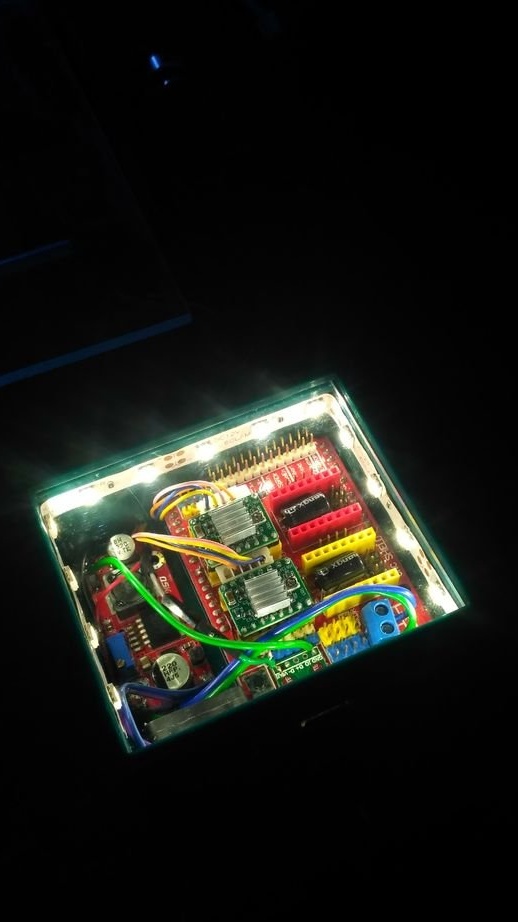
Βήμα δώδεκα: Εγκατάσταση
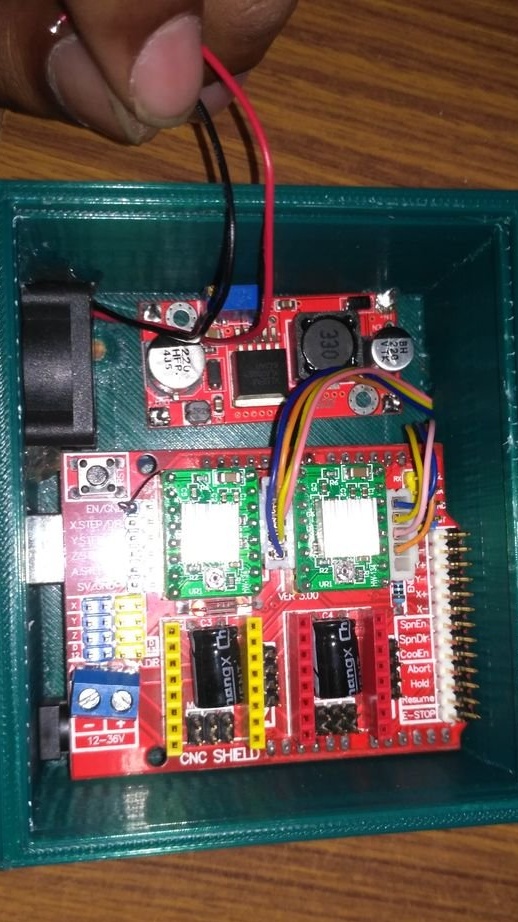
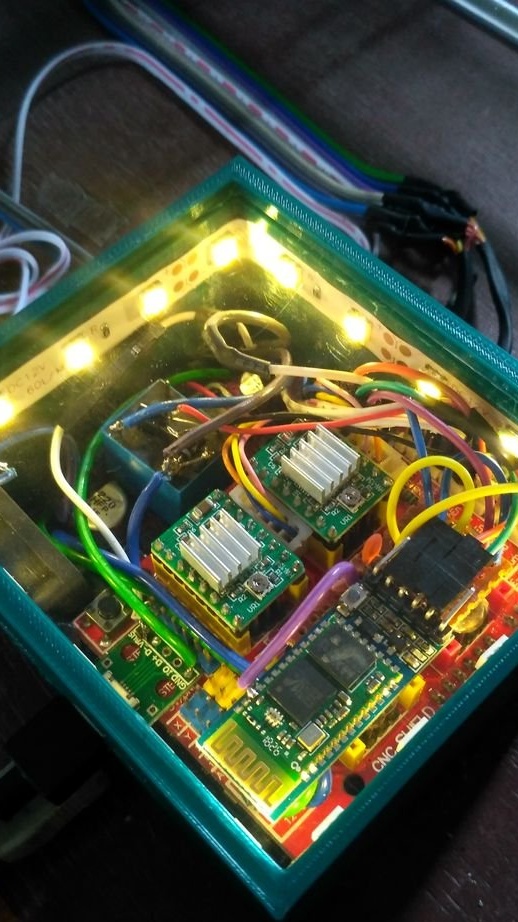
Εγκατάσταση σύμφωνα με το σχέδιο.
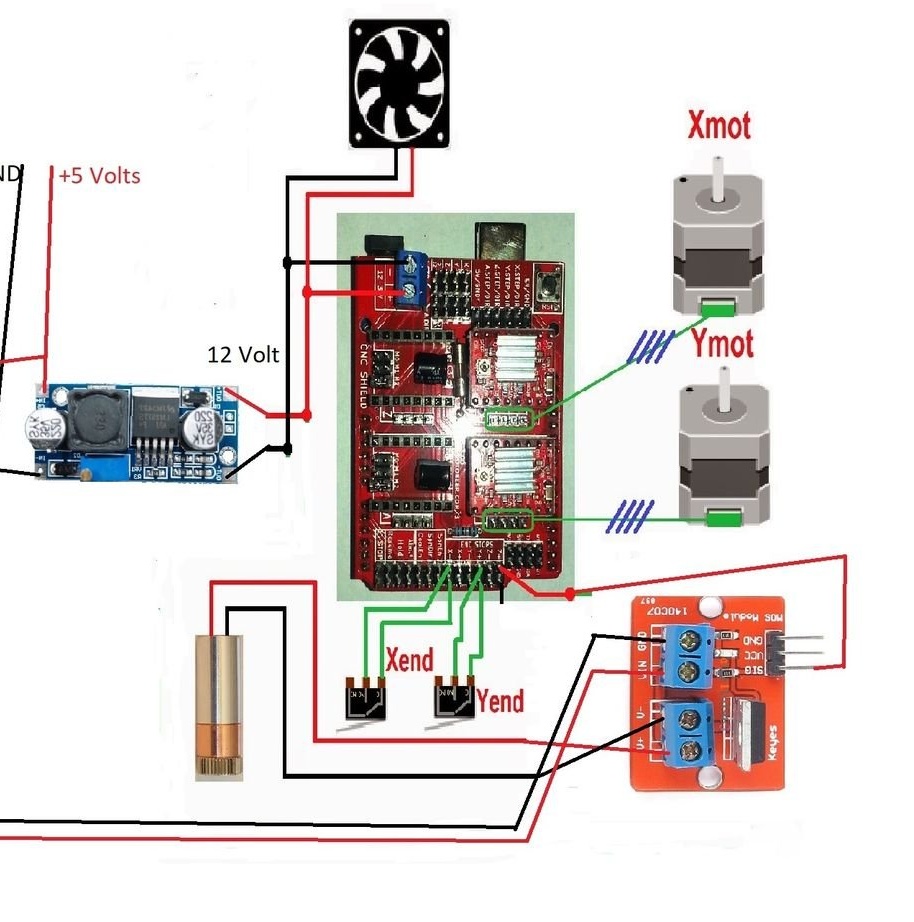
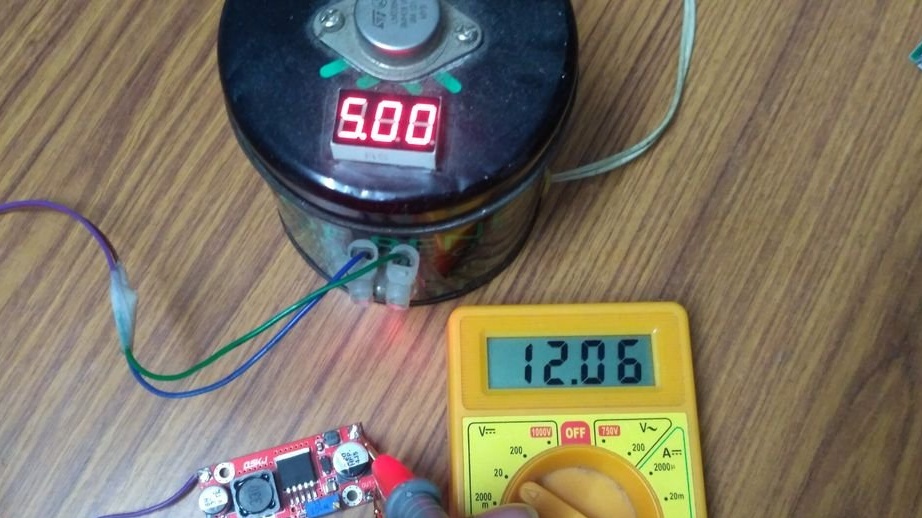
Ο μετατροπέας ώθησης έχει οριστεί σε 12V.
Το Arduino είναι εγκατεστημένο στη μονάδα επέκτασης CNC.
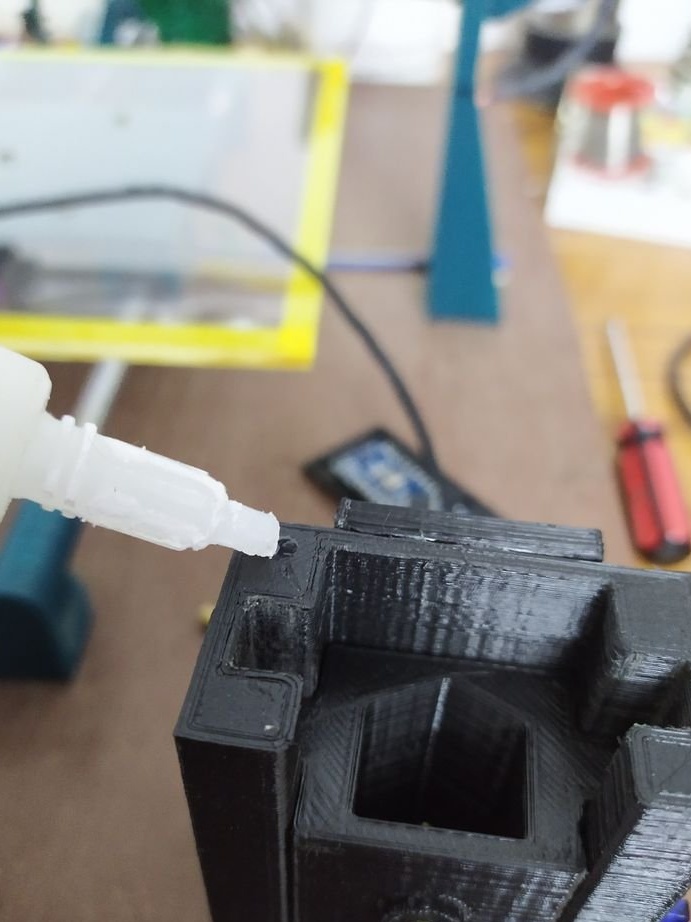
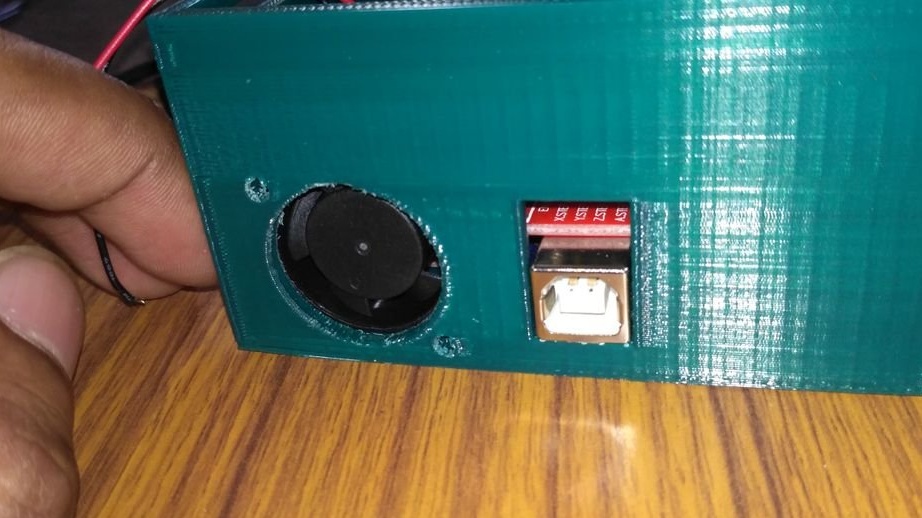
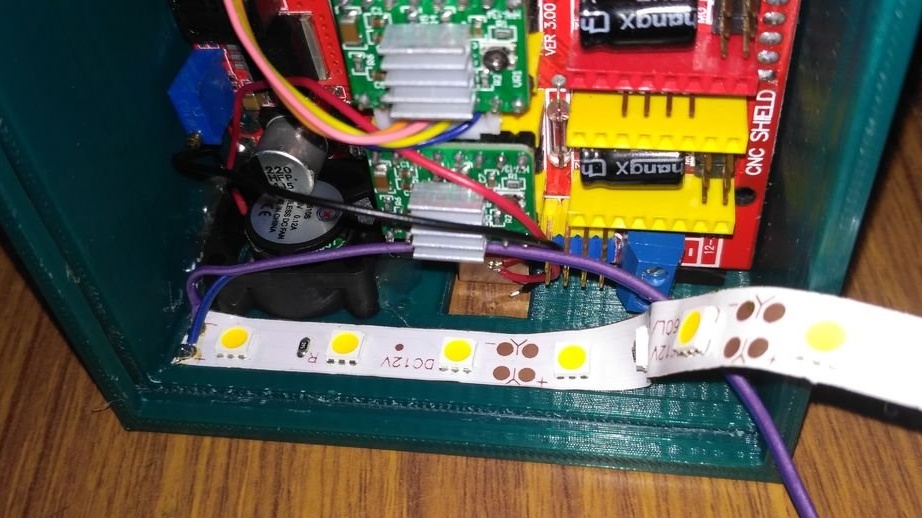
Ο ανεμιστήρας είναι κολλημένος στην προβλεπόμενη οπή για αυτό με κόλλα θερμής τήξης.
Έχει προστεθεί λωρίδα LED τόσο για εμφάνιση όσο και για ένδειξη ισχύος.
Η τυπωμένη θήκη βιδώνεται στο κόντρα πλακέ.
Χρησιμοποιείται ένα διαφανές ακρυλικό φύλλο 87 χ 75 mm πάχους 2 mm ως κάλυμμα σώματος. Μπορεί να εισαχθεί μέσω της αυλάκωσης που παρέχεται για αυτό σε μία πλευρά του περιβλήματος.
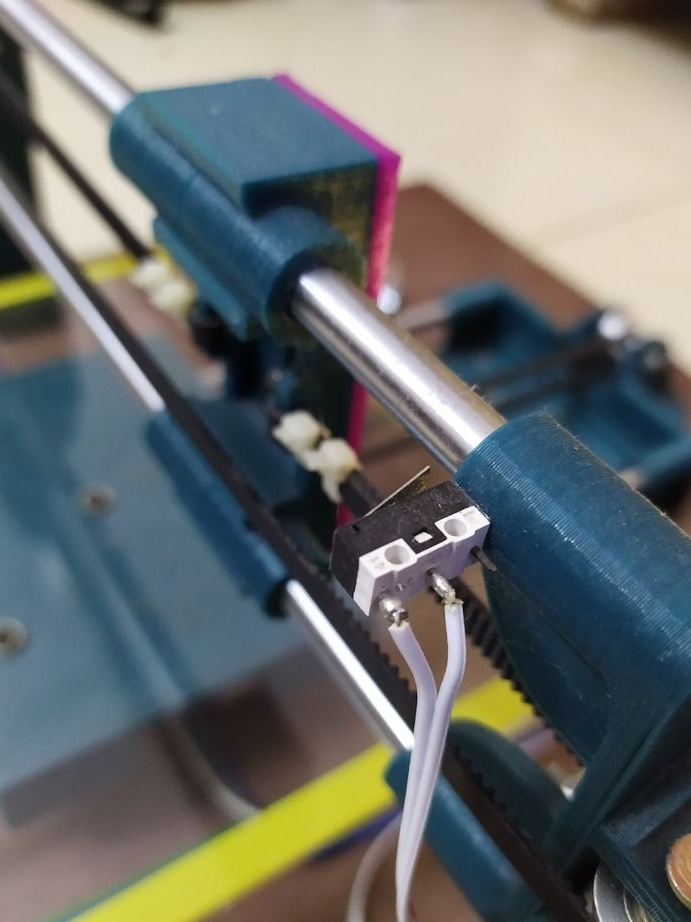
Οι οριακοί διακόπτες είναι τοποθετημένοι έτσι ώστε το κουμπί να πιέζεται 3 mm πριν τα ρουλεμάν του κάθε φορείου συγκρουστούν με τους υποδοχείς έλξης.
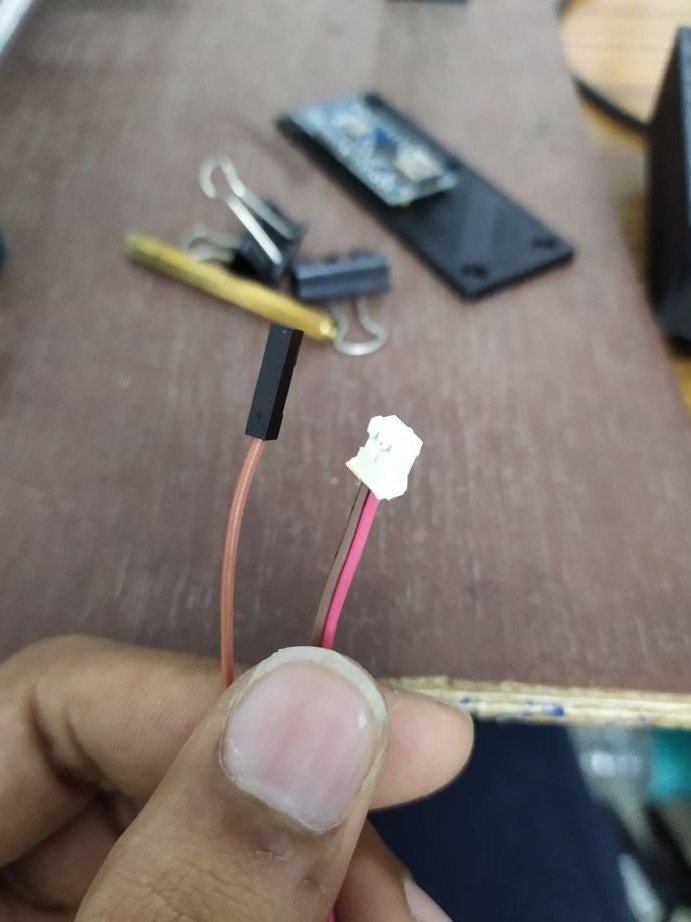
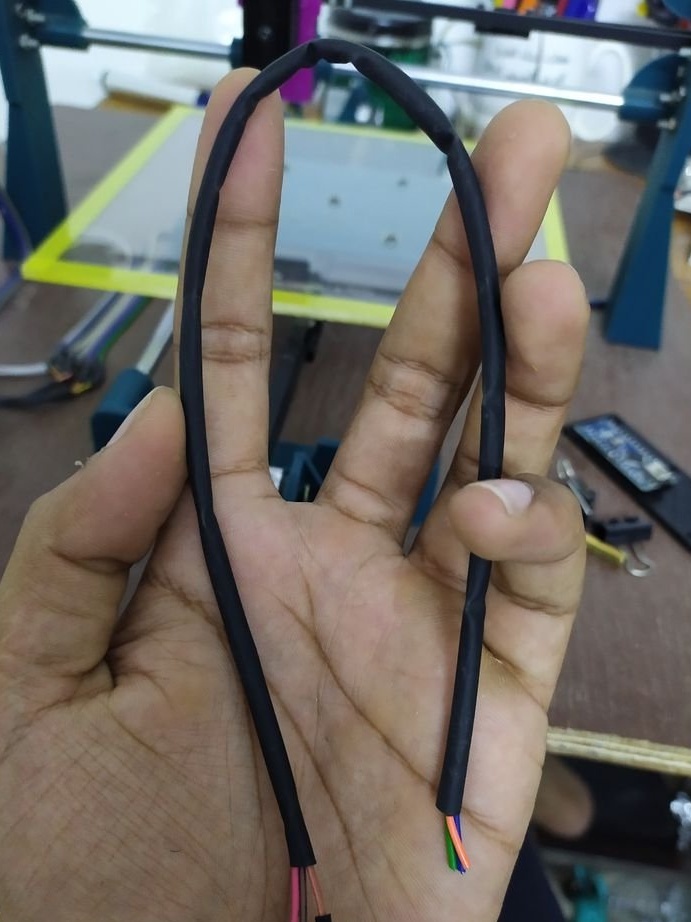
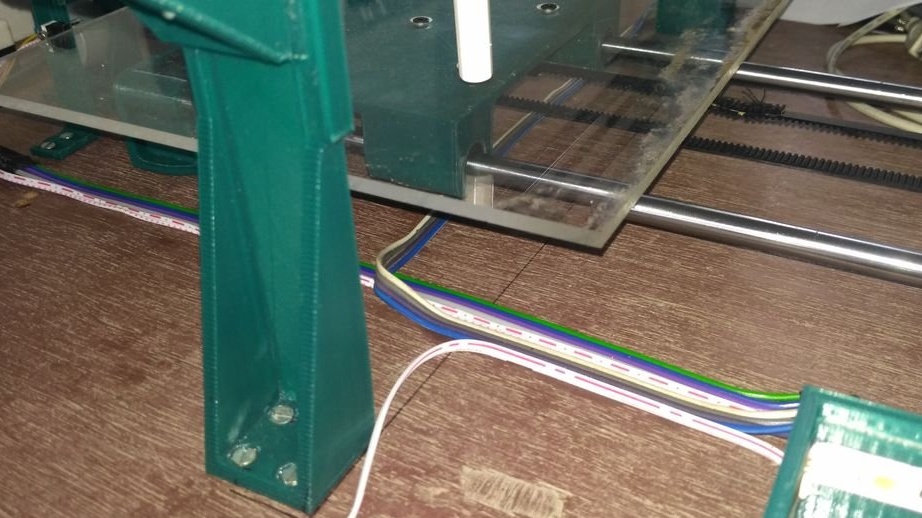
Τα καλώδια για τους κινητήρες και τους τερματικούς διακόπτες είναι επιμήκεις και οι συνδέσεις είναι μονωμένες.
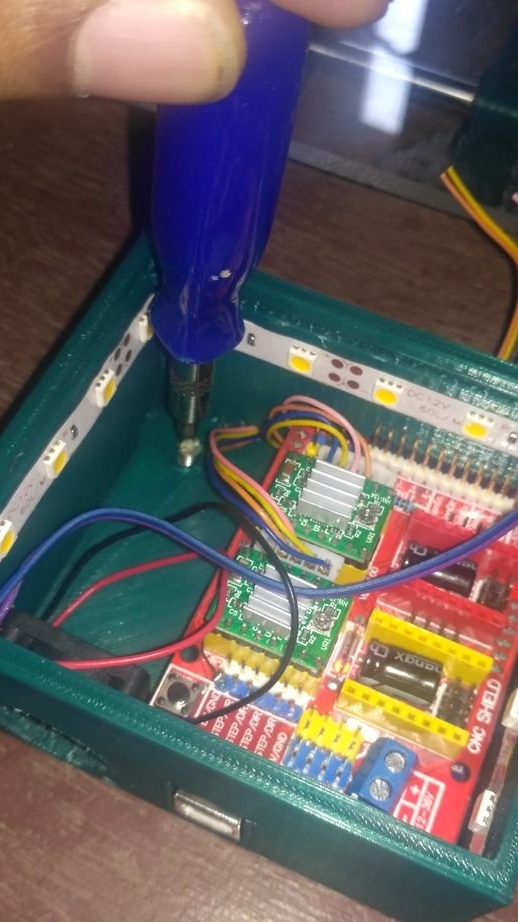

Τα σύρματα είναι κολλημένα στη βάση κόντρα πλακέ με επιχρίσματα.
Εδώ, ο μετατροπέας ώθησης χρησιμοποιείται μόνο για την τροφοδοσία των τσιπ οδηγών κινητήρα A4988. Κάθε κινητήρας καταναλώνει μόνο 150 mA ρεύματος.
Βήμα δεκατρία: Ενότητα Bluetooth
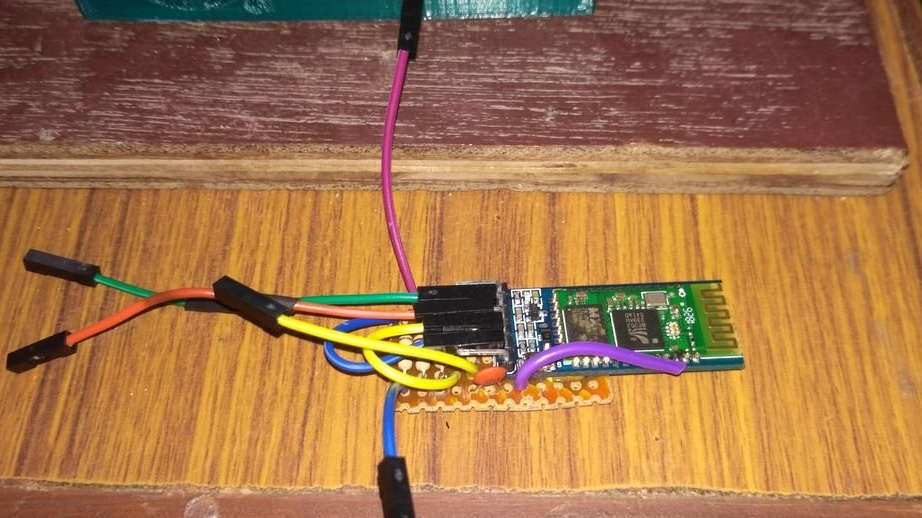
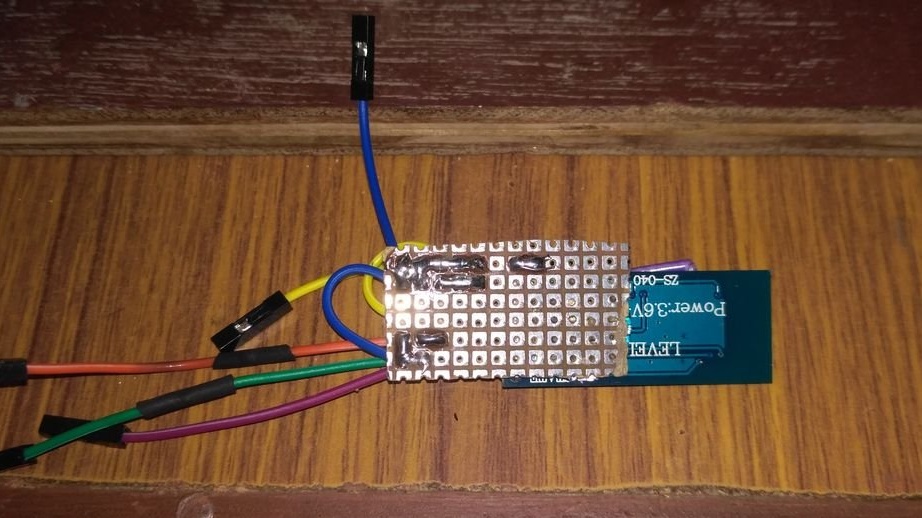
Τοποθετεί τη μονάδα bluetooth.
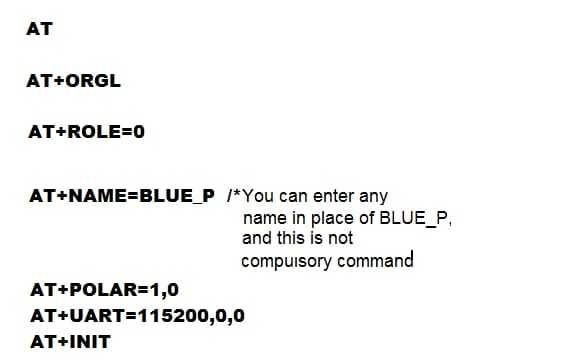
Για να στείλετε και να λάβετε δεδομένα ή, σε αυτή την περίπτωση, κωδικούς G μέσω της μονάδας Bluetooth HC05, πρέπει πρώτα να διαμορφώσετε την ενότητα.
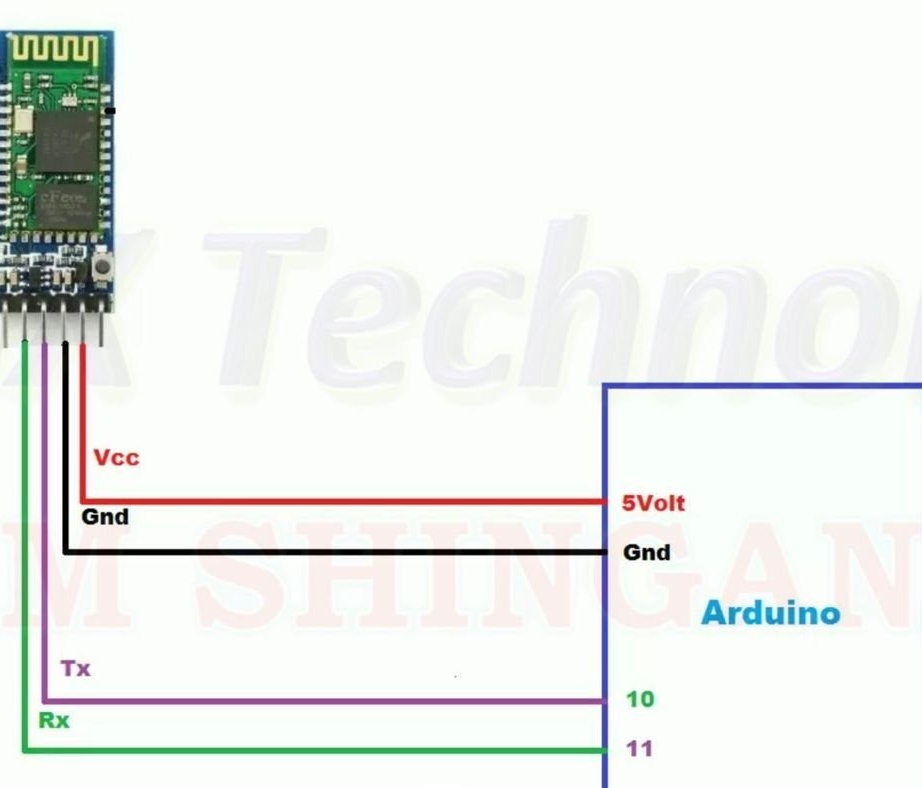
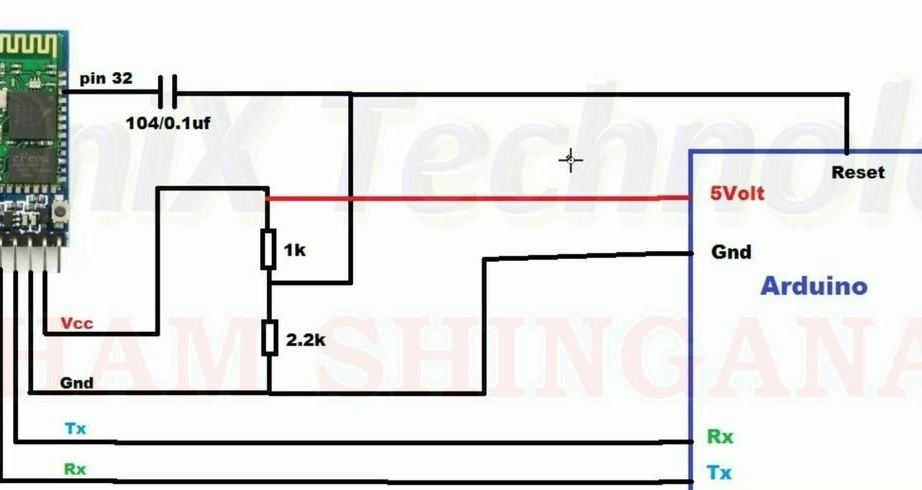
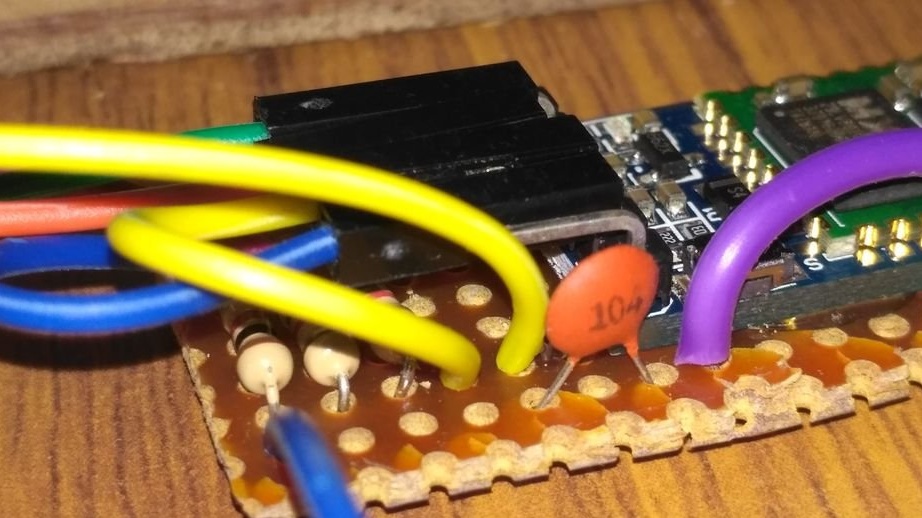
Συνδέστε τη μονάδα HC05 στο Arduino Uno, όπως φαίνεται στην πρώτη εικόνα.
Κάντε λήψη του κώδικα που επισυνάπτεται σε αυτό το βήμα για το Arduino.
BLUE_P.ino
Τώρα εισάγετε τους κωδικούς που εμφανίζονται στη δεύτερη φωτογραφία.
Αφού ολοκληρώσετε τις ρυθμίσεις, αποσυνδέστε τη μονάδα HC05 από το Arduino που χρησιμοποιήσατε για προγραμματισμό και συνδέστε το με το Arduino CNC Shield σύμφωνα με το διάγραμμα κυκλωμάτων στην 3η φωτογραφία.


Βήμα δεκατέσσερα: κωδικός και ρύθμιση
Για έναν χαράκτη λέιζερ, ο κύριος παίρνει τον κώδικα.
GRBL.zip
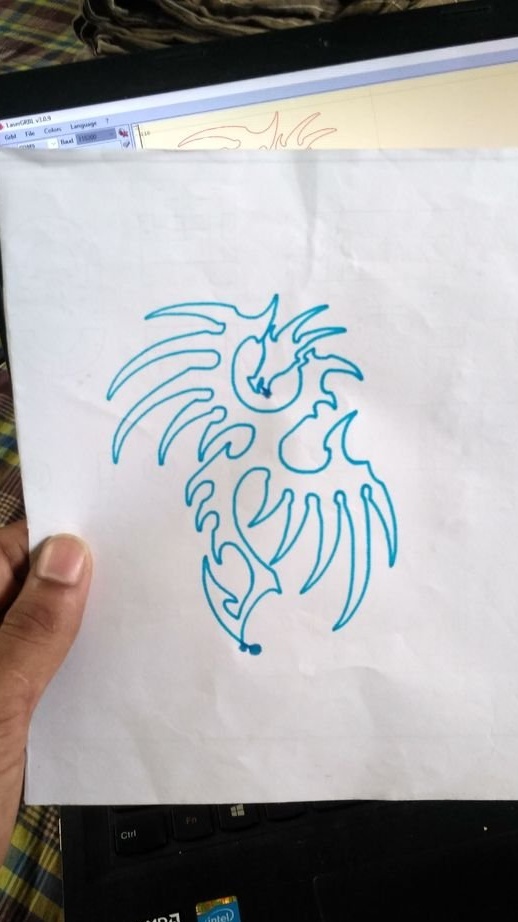
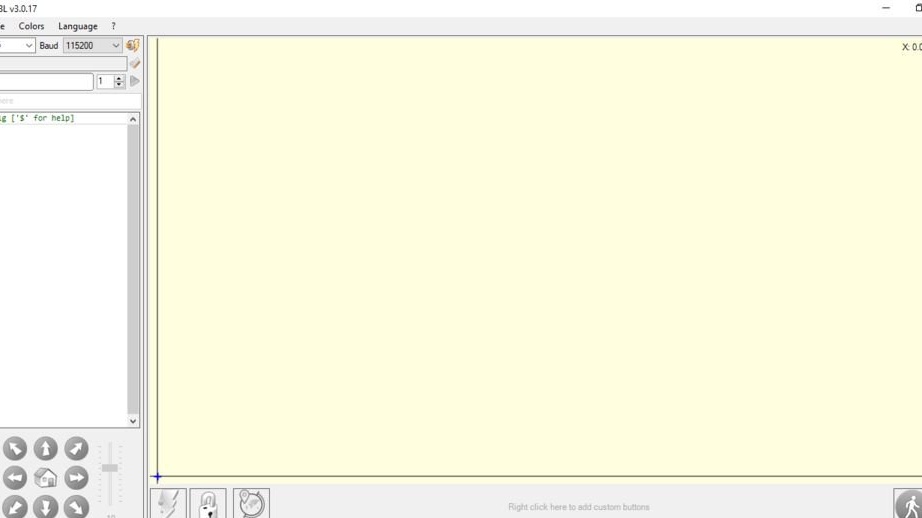
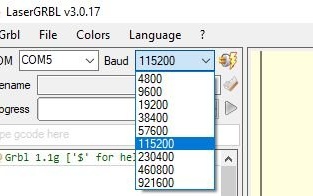
Το GRBL με λέιζερ είναι μία από τις καλύτερες δωρεάν ταινίες G για χαράκτες λέιζερ. Μπορεί να μεταφέρει κατευθείαν τους G κώδικες στο Arduino μέσω του θύρα som. Έχει ενσωματωμένο εργαλείο για τη μετατροπή εικόνων σε κώδικες G.
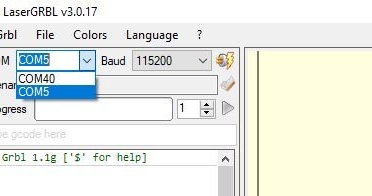
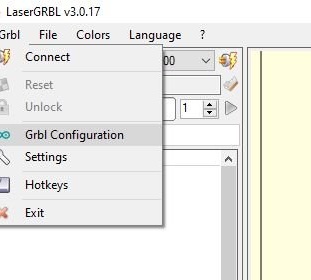
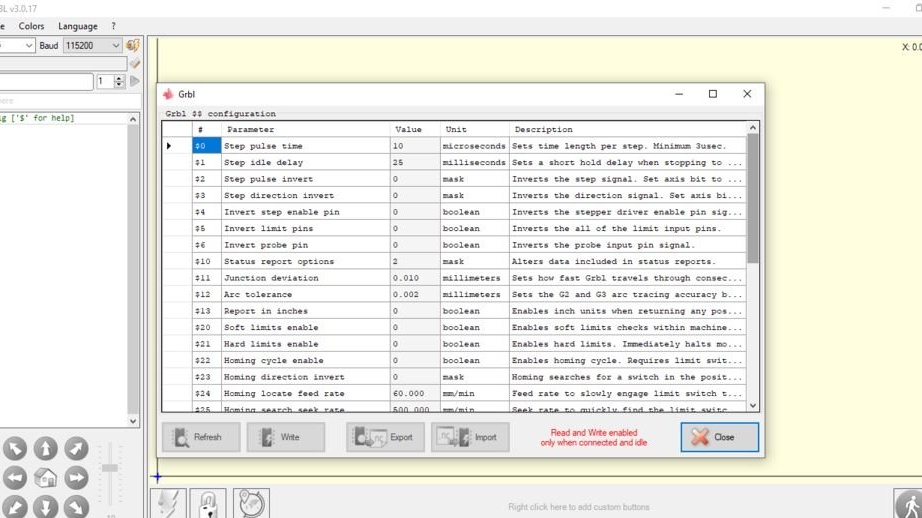
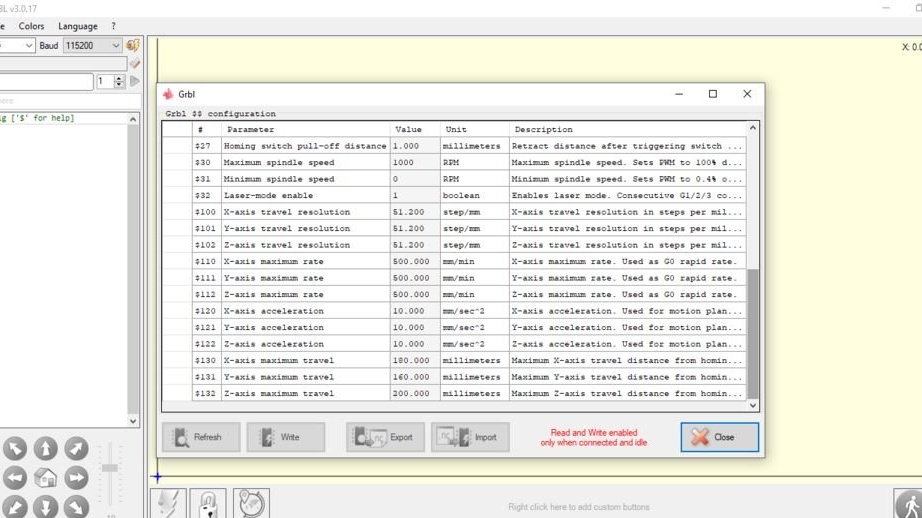
Όλες οι ρυθμίσεις πρέπει να γίνονται όπως στη φωτογραφία, λαμβάνοντας υπόψη τα εξής:
Εγκαταστήστε τη θύρα γατόψαρου που συνδέεται με τον χαράκτη λέιζερ.
Οι τιμές διαμόρφωσης μπορούν να αλλάξουν ώστε να ταιριάζουν καλύτερα στον χαράκτη σας.
Βήμα δεκαπέντε: Δοκιμές
Αφού συνδεθεί το λέιζερ, είναι καιρός να ελέγξετε την ακρίβειά του.
Υπάρχουν μερικά πράγματα που πρέπει να ελέγξετε:
Οι άξονες X και Y κινούνται προς τη σωστή κατεύθυνση;
Η καμπάνια λειτουργεί σωστά;
Μήπως ο κινητήρας παραλείπει τα βήματα λόγω υψηλών τριβών ή πολύ στενών ιμάντων.
Είναι τα μεγέθη των εκτυπωμένων εικόνων συμβατά με τα μεγέθη που υποδεικνύονται στο λογισμικό. Ο αριθμός των βημάτων ανά mm αντιστοιχεί στον χρησιμοποιούμενο βηματικό κινητήρα.
Η τάση του ιμάντα μπορεί να ρυθμιστεί χρησιμοποιώντας τον εντατήρα. Γυρίστε το μπουλόνι μέχρι να επιτευχθεί η σωστή τάση.
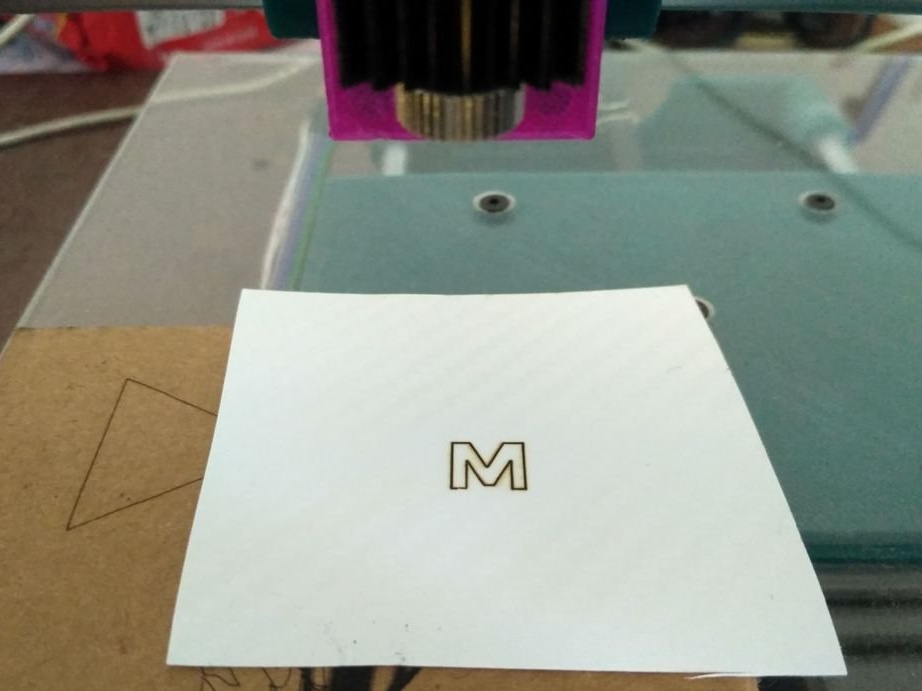
Για να ελέγξετε αν ο κινητήρας έχει βήματα και τις σωστές διαστάσεις, δώστε ένα απλό συνεχές γεωμετρικό σχήμα, για παράδειγμα, ένα τετράγωνο, ένα τρίγωνο ή ένα κύκλο. Εάν το λέιζερ ξεκινά από ένα σημείο και σταματά ιδανικά στο ίδιο σημείο, αυτό σημαίνει ότι το λέιζερ σας δεν έχει χάσει ούτε ένα βήμα και λειτουργεί τέλεια. Αφού εκτυπωθεί το τρίγωνο ή το τετράγωνο, μετρήστε με το χέρι το μέγεθός του με έναν χάρακα και δείτε εάν αντιστοιχεί στις διαστάσεις που καθορίσατε.

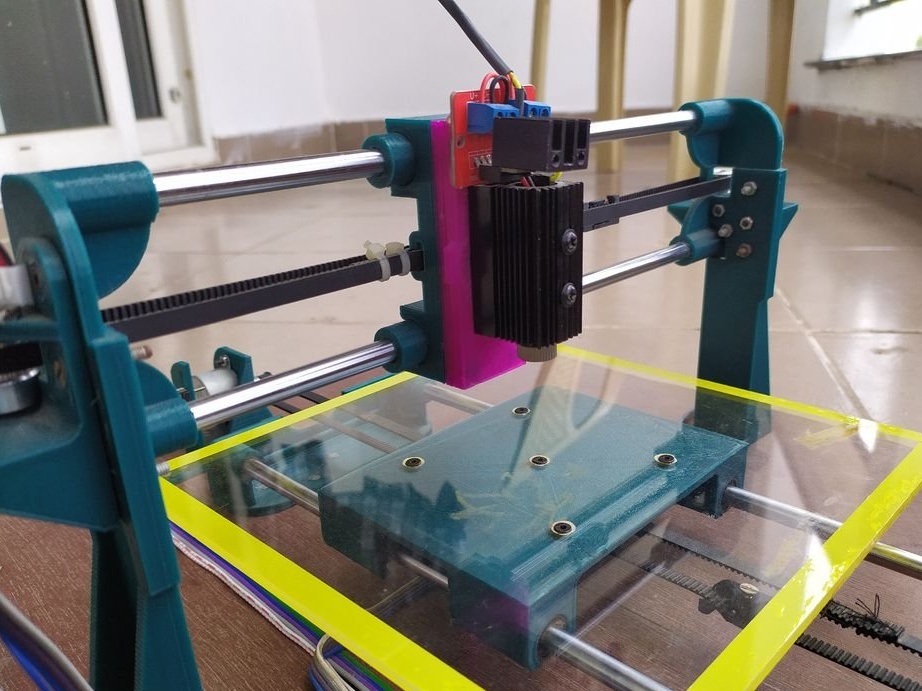
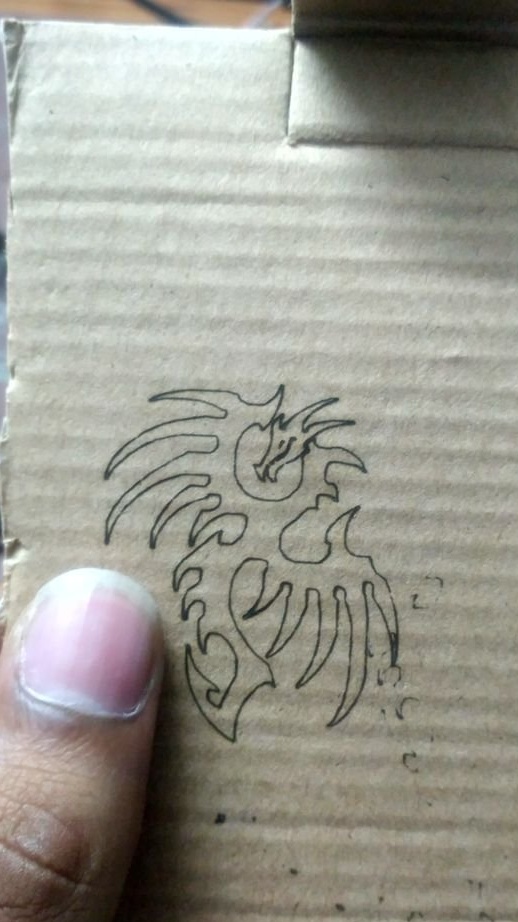
Σύμφωνα με τον πλοίαρχο, είναι απόλυτα ικανοποιημένος με το μηχάνημα.
Μπορεί να είναι χαραγμένο σε διάφορα υλικά, όπως ξύλο, χαρτόνι, δέρμα, πλαστικό, κλπ.
Δεδομένου ότι ο κινητήρας είχε περίπου 102 βήματα ανά mm, μπορούν να γίνουν μικρογραφίες με λεπτομέρειες.
Ο χαράκτης εργάστηκε χωρίς προβλήματα στο τροφοδοτικό USB.