

Τέτοιες το ρομπότ έχει ήδη δημιουργηθεί και ονομάζεται DIY: LightBot. Επιπλέον, ο καθένας μπορεί να το συλλέξει, όλα τα στοιχεία για τη δημιουργία μπορούν εύκολα να βρεθούν και το ρομπότ πρόκειται να συναρμολογηθεί απλά. Αυτός ο τύπος ρομπότ θα πηγαίνει συνεχώς μετά από τον ιδιοκτήτη στο σκοτάδι και τον επισημαίνει στη σωστή θέση, πράγμα που εξαλείφει την ανάγκη να κρατάτε τη λυχνία στο χέρι. Το ρομπότ θα παρακολουθείται από τον ιδιοκτήτη χάρη σε έναν υπέρυθρο αισθητήρα που συνδέεται με το πόδι του ιδιοκτήτη.
Υλικά και εργαλεία για τη δημιουργία ενός ρομπότ:
1. Υπέρυθρος φάρος. Μια τέτοια συσκευή θα αποτελείται από τέσσερις υπέρυθρες λυχνίες LED, οι οποίες μπορούν να βρεθούν στο τηλεχειριστήριο από την τηλεόραση.
2. Δύο τροχοί από ένα σετ K'nex ή παιδικά παιχνίδια.
3. Δύο μικρές μηχανές (μπορούν να βρεθούν στα παιδικά παιχνίδια).
4. Δύο υπέρυθρα τρανζίστορ όπως NPN ή φωτοαντιστάσεων. Οι υπέρυθρες φωτοταναυστά δεν είναι δύσκολο να αγοραστούν.
5. Τρεις μπαταρίες AA και ένα 9 Volt.
6. Σωλήνας PVC.
7. Κόλλα θερμής τήξης.
8. Πλαστική πιρούνι μίας χρήσης.
Η διαδικασία κατασκευής του ρομπότ:
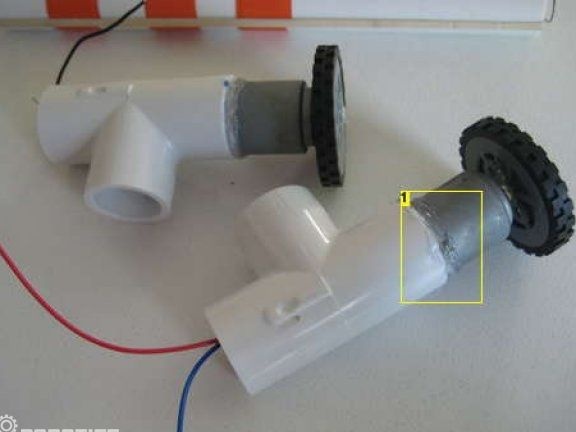
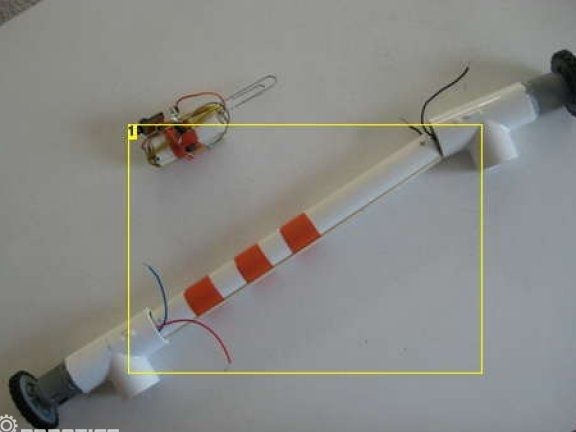
Πρώτο βήμα. Εγκατάσταση κινητήρα
Πρώτα πρέπει να εγκαταστήσετε τους κινητήρες. Για την τοποθέτησή τους, χρησιμοποιούνται πλαστικές "tees", οι οποίες στη συνέχεια τοποθετούνται στον κύριο σωλήνα. Οι κινητήρες είναι στερεωμένοι με κόλλα θερμής τήξης. Δεν είναι απαραίτητο να λυπάσαι εδώ για την κόλλα. Επίσης σε αυτό το στάδιο, οι τροχοί μπορούν να τοποθετηθούν στον άξονα των κινητήρων. Για να συγκρατούν σταθερά, μπορούν επίσης να στερεωθούν με θερμοκολλητική κόλλα.
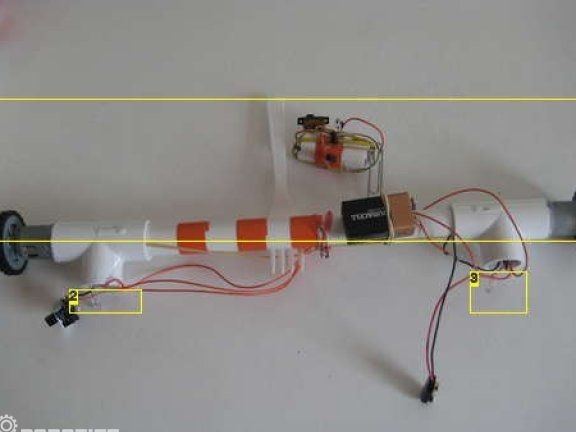
Βήμα δεύτερο Εγκατάσταση φωτοαντιστάσεων
Απαιτούνται φωτοαντιστάσεις για την παρακολούθηση του υπέρυθρου φάρου. Θα είναι ένα είδος ρομπότ μάτια. Ανάλογα με την κατεύθυνση στην οποία θα βγει το φως, το ρομπότ θα επιταχύνει μία από τις μηχανές για να γυρίσει προς τη σωστή κατεύθυνση.
Οι φωτεινές αντιστάσεις είναι προσαρτημένες στις "τσάπες" στις θέσεις που υποδεικνύονται από τους αριθμούς 2 και 3. Σε αυτές τις θέσεις μπορούν να στερεωθούν με κολλητική ταινία τριών ράβδων.
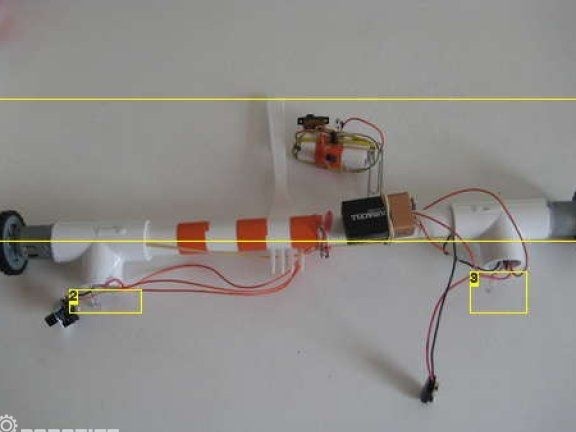
Βήμα τρίτο Εγκατάσταση τροφοδοτικού
Συνολικά, το ρομπότ λειτουργεί με δύο πηγές ενέργειας. Αυτές είναι τρεις μπαταρίες AA και μία μπαταρία 9 Volt. Όσον αφορά τις μπαταρίες δακτύλων, είναι εγκατεστημένες στο εσωτερικό του σωλήνα.Λοιπόν, μια μπαταρία τύπου "Krona" είναι συνδεδεμένη στο ακουστικό από έξω.
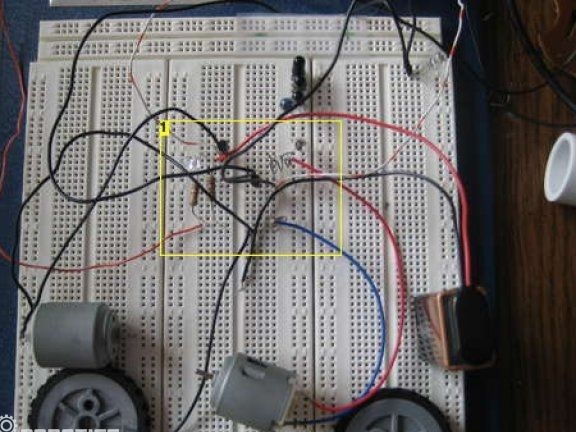
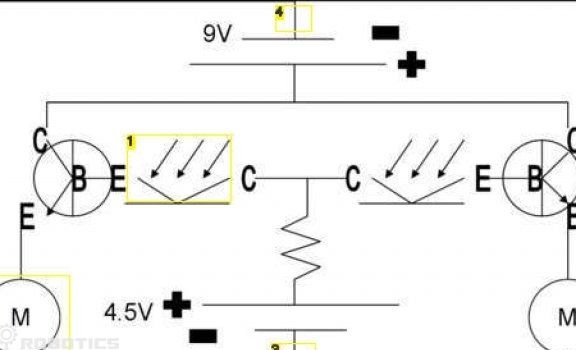
Βήμα τέσσερα Κύκλωμα ρομπότ
Το σχέδιο σχεδιάζεται κατά τέτοιο τρόπο ώστε εάν το ρομπότ να βλέπει ακτινοβολία στη μία πλευρά, τότε επιταχύνει τον κινητήρα από την αντίθετη πλευρά, έτσι ώστε το ρομπότ να γυρίζει γύρω. Οι επιθυμητές στροφές του κινητήρα επιτυγχάνονται με την αντικατάσταση πειραματικά των αντιστάσεων.
Ένα άλλο κύκλωμα μπορεί να συμπληρωθεί με ένα διακόπτη. Πρέπει να εγκατασταθεί με τέτοιο τρόπο ώστε να διακόπτει την τροφοδοσία του ρομπότ.
Στο διάγραμμα, ο αριθμός 1 δηλώνει ένα φωτοτρανζίστορ, 2 - τον ελεγκτή κινητήρα, 3 - ένα μέρος για την εγκατάσταση ενός διακόπτη, 4 - μπορείτε επίσης να βάλετε ένα διακόπτη εδώ.
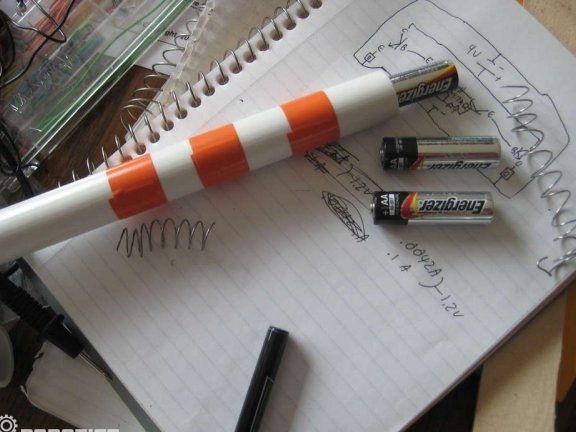
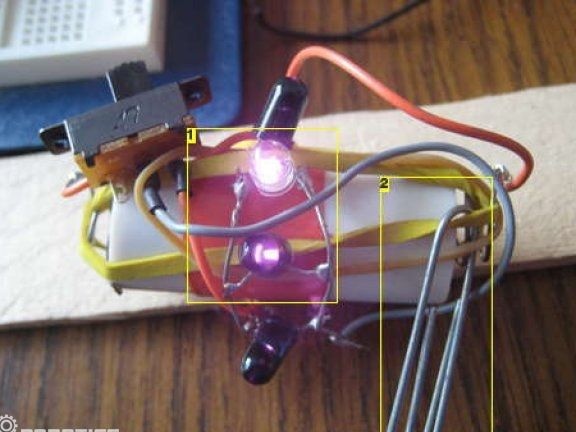
Βήμα πέντε Δημιουργήστε ένα IR Beacon
Για να δημιουργηθεί ένας υπέρυθρος φάρος, λαμβάνεται ένας σύντομος σωλήνας πολυβινυλοχλωριδίου, στον οποίο έχει τοποθετηθεί μια μπαταρία ΑΑ. Οι επαφές διατηρούνται χάρη σε μια ελαστική ταινία και η τροφοδοσία των τεσσάρων υπέρυθρων διόδων ελέγχεται από ένα διακόπτη. Είναι αδύνατο να δούμε τέτοιο φως με το μάτι, προκειμένου να ελέγξουμε τη λειτουργικότητα των διόδων που πρέπει να εξετάσουμε μέσω μιας ψηφιακής φωτογραφικής μηχανής. Ο φάρδος είναι στερεωμένος με ένα συνηθισμένο κλιπ χαρτιού στο πόδι.
Βήμα έξι Το τελικό στάδιο της συναρμολόγησης ρομπότ
Τώρα όλα πρέπει να συνδεθούν όπως υποδεικνύεται στο διάγραμμα. Το μηχανικό μέρος πρέπει επίσης να συναρμολογηθεί, η μεγαλύτερη προσοχή πρέπει να δοθεί στις φωτοαντιστάσεις, πρέπει να παραμείνουν έξω, γιατί διαφορετικά δεν θα μπορέσουν να πάρουν το σήμα του φάρου. Τώρα, ενεργοποιώντας το ρομπότ, πρέπει να περπατήσετε γύρω του και να δείτε τι θα κάνει.
Φυσικά, το ρομπότ μπορεί να μην πάει μετά από τον ιδιοκτήτη για πρώτη φορά, αλλά δεν πρέπει να απελπίζεστε, επειδή το κύκλωμα μπορεί να τροποποιηθεί και το ρομπότ να ρυθμιστεί ανάλογα με τις ανάγκες. Σύμφωνα με τον συγγραφέα, στο μέλλον το λογισμικό μπορεί να εγκατασταθεί στο ρομπότ, χάρη στο οποίο θα αναγνωρίσει αντικείμενα και ανθρώπους. Μπορείτε επίσης να εγκαταστήσετε πολλούς διαφορετικούς αισθητήρες και να κάνετε αυτό το ρομπότ συσκευή υψηλής τεχνολογίας.