Την επόμενη νύχτα της Παρασκευής ο συγγραφέας ήθελε να συλλέξει κάτι ενδιαφέρον. Υπενθυμίζοντας αυτό, είδε τα σχέδια σχεδίασης ρομπότ, και έχοντας έναν σερβο συνεχούς περιστροφής, αποφασίστηκε να συναρμολογηθεί ένα τέτοιο ρομπότ. Μια σερβο συνεχούς περιστροφής μπορεί να γίνει από συνηθισμένο.
Υλικά:
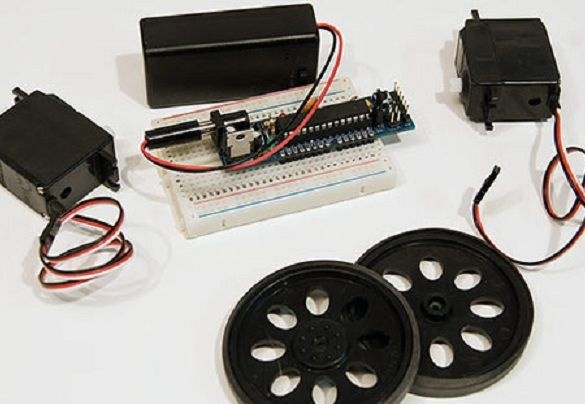
- DC Boarduino (αυτός είναι ένας κλώνος Arduino)
- Servo συνεχούς περιστροφής 2 τεμαχίων
- Σέρβο τροχοί 2 τεμ
- breadboard
- Υποδοχή μπαταρίας 9V με βύσμα και διακόπτη 2,1 mm
- σύνδεση καλωδίων
Δεν είναι απαραίτητο να χρησιμοποιήσετε το Boarduino σε αυτό το έργο, αρκεί να υπάρχει οποιοδήποτε διοικητικό συμβούλιο Arduino. Ο συγγραφέας επέλεξε αυτό το διοικητικό συμβούλιο λόγω του μεγέθους του. Θα χρειαστείτε επίσης έναν ορισμένο αριθμό δεικτών, μπορείτε να αγοράσετε ένα σύνολο διαφορετικών χρωμάτων για αυτό το ρομπότ.
Επιπλέον, χρειάζεστε μια μπαταρία 9V και τη βάση για το σώμα του ρομπότ σχεδίασης.
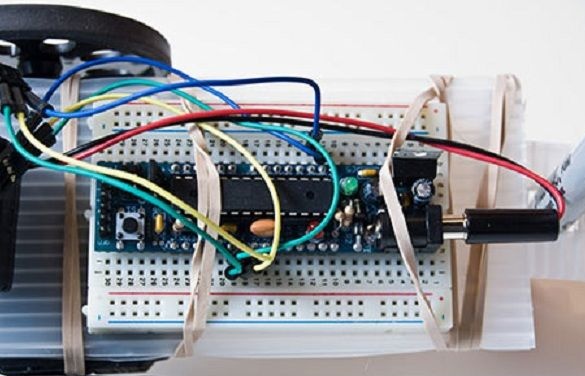
Δεν υπάρχει τίποτα περίπλοκο στη συναρμολόγηση του ρομπότ. Πρώτα απ 'όλα, ο συγγραφέας στερεώνει τους τροχούς με δύο σερβοειδείς με κολλητική ταινία και μετρά την απόσταση μεταξύ των τροχών. Είναι απαραίτητο το πλάτος της βάσης να είναι ελαφρώς μικρότερο από την απόσταση μεταξύ των τροχών. Ο συγγραφέας χρησιμοποιεί κυματοειδές πλαστικό, καθώς είναι αρκετά ελαφρύ και ανθεκτικό και δεν είναι δύσκολο να εργαστεί κανείς μαζί του. Η χρήση της, φυσικά, δεν είναι απαραίτητη, μπορείτε ακόμη και να χρησιμοποιήσετε χαρτόνι ή πλαστικό από τις θήκες για δίσκους.
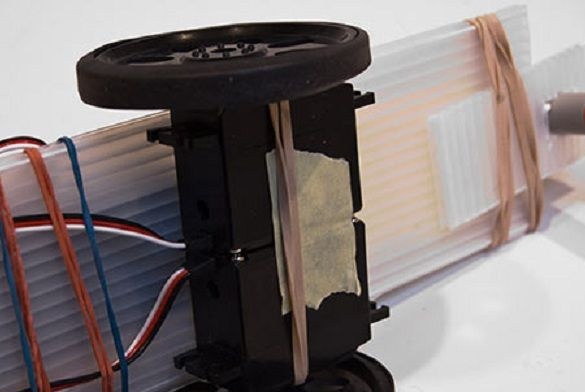
Οι σερβομηχανισμοί συνδέθηκαν στη βάση με ελαστικές ταινίες. Κατά την τοποθέτηση της μπαταρίας και του breadboard δημιουργήθηκαν δυσκολίες, καθώς ήταν απαραίτητο να διατηρηθεί μια ισορροπία. Ο συγγραφέας ήθελε να κάνει περισσότερο χώρο στην πλευρά με την οποία τοποθετήθηκε ο δείκτης, αλλά δεν ήθελε να κάνει πλεονέκτημα στην αντίθετη πλευρά. Με τη βοήθεια ταινιών από καουτσούκ, είναι πολύ εύκολο να ρυθμίσετε τη θέση των εξαρτημάτων, προσδιορίζοντας τη βέλτιστη.
Καθ 'όλη τη διάρκεια του έργου, τα καλώδια με ακίδες BLS χρησιμοποιούνται για σύνδεση με το breadboard, ενώ οι σερβομηχανισμοί συνδέονται μαζί τους.
Όταν ο συγγραφέας ολοκλήρωσε όλες τις εργασίες για τη συναρμολόγηση του ρομπότ, ήθελε αμέσως να ελέγξει την απόδοσή του. Χρειάστηκε αρκετός χρόνος για να βρούμε τον κώδικα. Έχοντας καταλάβει ένα άρθρο σχετικά με τον έλεγχο του σερβο συνεχούς περιστροφής Parallax με τον Arduino, συνειδητοποίησε ότι ήταν στο σωστό δρόμο. Ο κώδικας έχει απλοποιηθεί όσο το δυνατόν περισσότερο, αυτή τη στιγμή το Drawbot μπορεί μόνο να ταξιδέψει σε κύκλους.Φυσικά, αυτό είναι πρωτόγονο, αλλά είναι επίσης μια μεγάλη αρχή και η βάση για την ανάπτυξη και τον εκσυγχρονισμό. Ο κώδικας μπορεί να μεταφορτωθεί κάτω από το άρθρο.
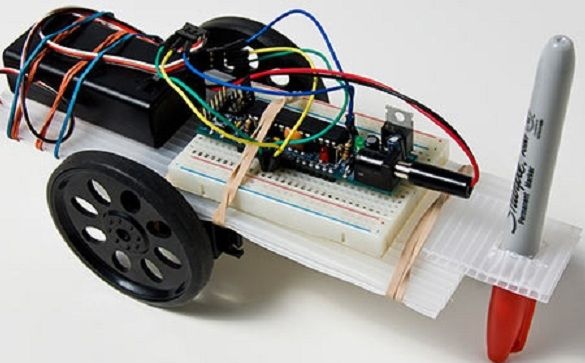
Τώρα ο συγγραφέας έχει λάβει ένα ρομπότ που ταξιδεύει σε έναν κύκλο. Συνεχίζοντας το έργο, ο συγγραφέας πήρε τα υπολείμματα του κυματοειδούς πλαστικού και έκανε μια τρύπα μέσα του με τη βοήθεια ενός μαχαιριού. Η τρύπα κόπηκε με διάμετρο ελαφρώς μικρότερη από την απαιτούμενη, χάρη στη μειωμένη οπή ο δείκτης ήταν τέλεια συνδεδεμένος. Εάν χρησιμοποιείτε χαρτόνι, τότε αυτό το αποτέλεσμα δεν θα είναι και ο δείκτης δεν θα κρατήσει καλά ή θα πέσει έξω.

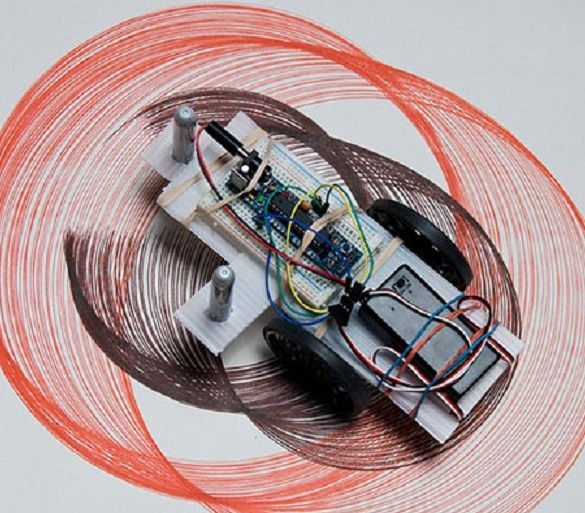
Μετά την εγκατάσταση του δείκτη, είναι καιρός να ελέγξετε το ρομπότ. Με τον καθορισμό του στο κέντρο του φύλλου 24x18 και την ενεργοποίησή του, ο συντάκτης τελικά είδε το Drawbot σε δράση. Άρχισε να γυρίζει κύκλους κατάρτισης. Μπορούμε να πούμε ότι ο δημιουργός κατάφερε να δημιουργήσει ένα ρομπότ που δημιουργεί ένα είδος έργου τέχνης.
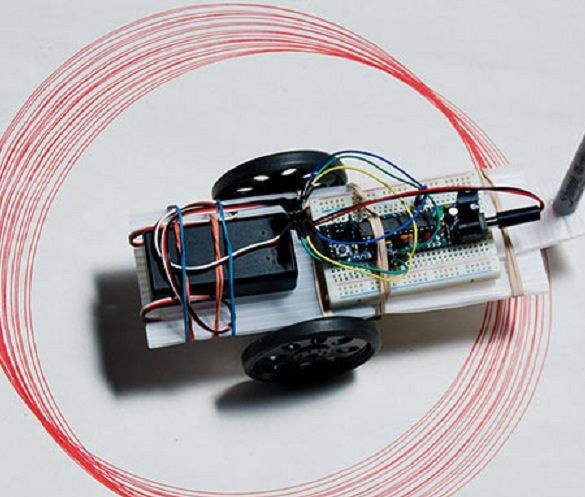
Η εικόνα βγήκε λίγο άβολη λόγω του φύλλου που βρισκόταν στο πάτωμα, και δεν ήταν αρκετά ζυγό, και κατά πάσα πιθανότητα, οι σερβοί δεν περιστρέφονταν συγχρόνως. Αποδείχθηκε ότι ένας κύκλος θα μπορούσε να είναι χαμηλότερος, ο δεύτερος υψηλότερος και ο επόμενος ακόμα λίγο μεγαλύτερος ή μικρότερος. Πιθανώς, σε μια ιδανική τοποθεσία, όλοι οι κύκλοι θα ευθυγραμμιστούν σε μία γραμμή. Θα φαινόταν πιο όμορφη στην εμφάνιση.
Ο συγγραφέας σκέφτηκε ότι ο δεύτερος δείκτης θα μπορούσε να φωτίσει την κατάσταση, και το ρομπότ θα κάνει πιο ενδιαφέρουσες εικόνες. Το αποτέλεσμα ήταν καλό, κύκλοι άρχισαν να διασταυρώνονται μεταξύ τους. Θα είναι πιο ενδιαφέρον να δούμε πώς συμπεριφέρεται το Drawbot σε ένα μεγάλο κομμάτι χαρτιού.
Απελευθερώνοντας το ρομπότ σε μια επιφάνεια χαρτιού, ο συγγραφέας μπορεί να πάρει έναν κύκλο ή μια δέσμη κύκλων. Αλλά έχοντας ένα έτοιμο ρομπότ, μπορείτε ήδη να σκεφτείτε να το βελτιώσετε αλλάζοντας τον κώδικα.