

Εργαλείο βίντεο ρομπότ
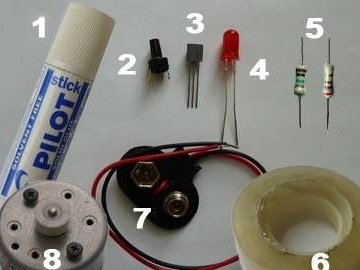
Υλικά και εργαλεία για τη δημιουργία ενός ρομπότ:
- στεγνή κόλλα κόλλας.
- διαφανή ταινία.
- μη σταθεροποιημένο κουμπί με δύο ακίδες,
- ένα LED τύπου ARL-513URC-B που αναβοσβήνει,
- Τρανζίστορ τύπου KP505A.
- δύο αντιστάσεις ονομαστικής τιμής 1M και 270 Ohm,
- σύνδεσμος κλιπ για σύνδεση με μπαταρία τύπου "Crown".
- μοντέλο κινητήρα RF-300CA-D / C 3V ή παρόμοιο.

Λειτουργικότητα και χαρακτηριστικά του ρομπότ:
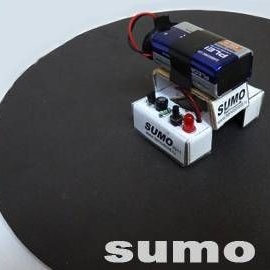
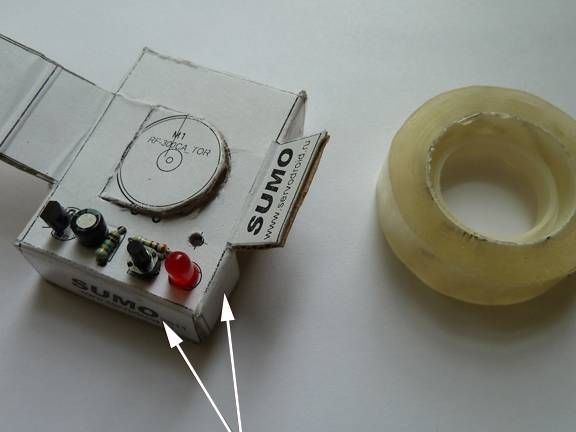
Στη φωτογραφία μπορείτε να δείτε ήδη συναρμολογημένα το ρομπότ. Για να μετακινήσετε τη συσκευή, χρησιμοποιείται μόνο ένας κινητήρας, είναι εγκατεστημένος κάθετα, αλλά υπό συγκεκριμένη γωνία. Όταν μετακινείται σε ένα μικρό τμήμα, το ρομπότ κινείται σε ευθεία γραμμή και κάνει τόξο σε μεγαλύτερο τμήμα.
Ένα κουμπί χρησιμοποιείται για την ενεργοποίηση του ρομπότ · όταν πατηθεί, το ρομπότ ανοίγει για 20 δευτερόλεπτα. Στη συνέχεια, πραγματοποιείται αυτόματη διακοπή λειτουργίας και το ρομπότ βρίσκεται σε κατάσταση αναμονής μέχρι την επόμενη ενεργοποίηση.
Ένα άλλο χαρακτηριστικό του ρομπότ είναι ότι σταματά αυτόματα στην άκρη του δακτυλίου. Η εκπλήρωση αυτής της προϋπόθεσης είναι δυνατή εάν το βάρος του αντιπάλου δεν είναι μικρότερο από το βάρος του ρομπότ και το πάχος του δακτυλίου δεν είναι μικρότερο από 3 mm.
Εδώ, μια μπαταρία 9 Volt χρησιμοποιείται ως πηγή ενέργειας, τοποθετείται πάνω από το ρομπότ. Χάρη στο επιπλέον βάρος, το ρομπότ συσσωρεύει την απαραίτητη κινητική ενέργεια για τις απαραίτητες ενέργειες.
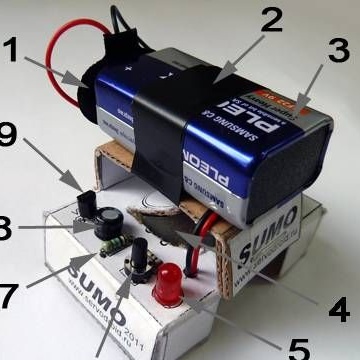
Στην εικόνα, τα εξαρτήματα ρομπότ σημειώνονται με αριθμούς:
1. Κλιπ για τη σύνδεση της μπαταρίας.
2. Ασφάλεια μπαταρίας.
3. Τροφοδοσία ρεύματος (μπαταρία 9 V).
4. Ο κινητήρας.
5. LED που αναβοσβήνει (δηλώνει ότι η τροφοδοσία είναι συνδεδεμένη).
6. Κουμπί για να ενεργοποιήσετε το ρομπότ.
7. Αντίσταση, χάρη σε αυτό μπορείτε να ρυθμίσετε την ώρα του ρομπότ.
8. Capacitor, είναι επίσης υπεύθυνος για το χρόνο του ρομπότ.
9. Τρανζίστορ τύπου KP505A, είναι οδηγός κινητήρα.
Διαδικασία συναρμολόγησης ρομπότ:
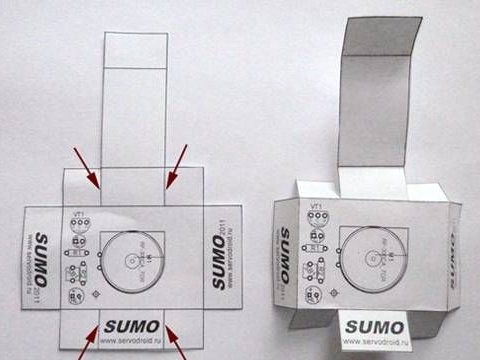
Πρώτο βήμα. Κάνουμε την υπόθεση
Για να γίνει η περίπτωση, ο συγγραφέας χρησιμοποιεί ένα κυματοειδές χαρτόνι, πρέπει να εφαρμόσετε ένα περίγραμμα σε αυτό σύμφωνα με το πρότυπο. Το πρότυπο μπορεί να εκτυπωθεί σε έναν εκτυπωτή, είναι προσαρτημένο στο αντικείμενο. Επιπλέον, αφού κάνετε τις απαραίτητες πτυχώσεις, το σχέδιο μπορεί να κοπεί κατά μήκος παχών γραμμών. Για να εγκαταστήσετε τον κινητήρα, πρέπει να κόψετε ένα ημικύκλιο στο χαρτόνι και στη συνέχεια να το λυγίσετε λίγο, όπως υποδεικνύεται στη φωτογραφία.


Βήμα δεύτερο Εγκατάσταση στοιχείων ραδιοφώνου
Στο επόμενο στάδιο, θα πρέπει να εγκαταστήσετε όλα τα απαραίτητα στοιχεία ραδιοφώνου. Για να γίνει αυτό, πρέπει να πάρετε ένα τρύπημα και να κάνετε τρύπες στο χαρτόνι, πρέπει να γίνονται σε στρογγυλά σημάδια. Για να διορθώσετε τα εξαρτήματα, μετά την εγκατάσταση, τα συμπεράσματά τους πρέπει να είναι ελαφρώς λυγισμένα. Μπορείτε επίσης να δείτε το σημάδι με τη μορφή ενός ματιά στο χαρτόνι, εδώ πρέπει να κάνετε μια μεγάλη τρύπα, ένα καλώδιο ισχύος θα περάσει μέσα από αυτό.
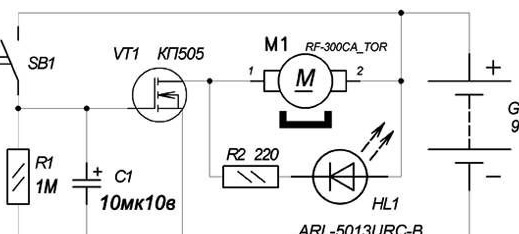
Μετά από αυτό, μπορείτε να πάρετε ένα συγκολλητικό σίδερο και να αρχίσετε να συνδέετε τις επαφές των στοιχείων ραδιοφώνου σύμφωνα με το σχέδιο.





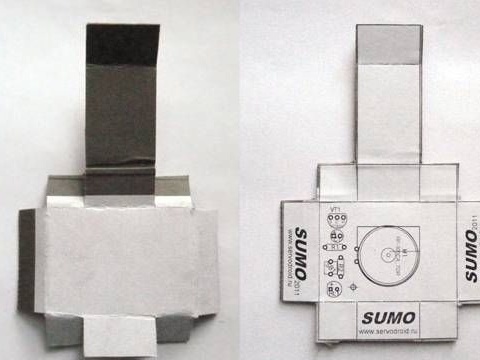
Βήμα τρίτο Διορθώνουμε τις κάτω πλευρικές επιφάνειες
Σε αυτό το στάδιο, οι κάτω πλευρικές επιφάνειες μπορούν να ενωθούν. Για να γίνει αυτό, θα πρέπει να κάμπτετε τα κάτω αεροπλάνα και στη συνέχεια να τα διορθώσετε με διαφανή ταινία. Επίσης στην εικόνα μπορείτε να δείτε τα στοιχεία της θήκης προς τα επάνω, είναι απαραίτητα για τη σταθεροποίηση της μπαταρίας.


Βήμα τέσσερα Συνδέστε περιφερειακά
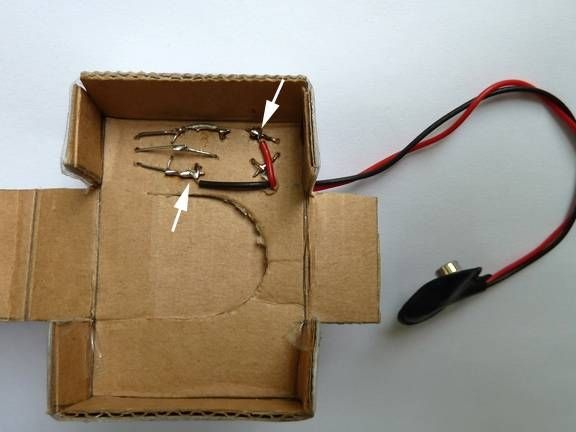
Για να συνδέσετε την τροφοδοσία με την μπαταρία, πρέπει να χρησιμοποιήσετε μια υποδοχή κλιπ. Το καλώδιο πρέπει να περάσει μέσα από την τρύπα, το κόκκινο είναι συγκολλημένο στη θετική επαφή του LED, και το μαύρο στο μείον του πυκνωτή C1.
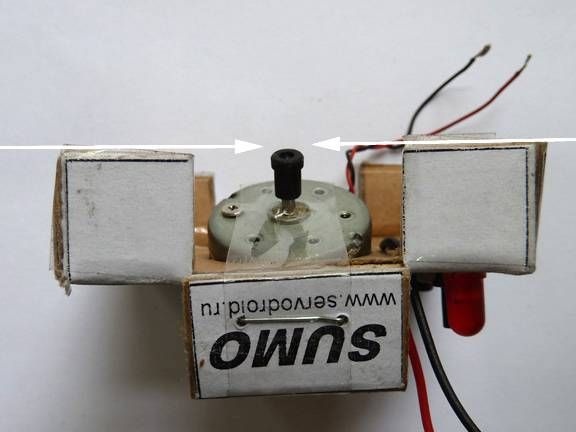
Στη συνέχεια, πρέπει να συνδέσετε τις επιφάνειες αριστεράς και δεξιάς πλευράς, ως αποτέλεσμα, θα πρέπει να ληφθεί το γράμμα "P". Για αξιόπιστη στερέωση των στοιχείων, χρησιμοποιείται ένας βραχίονας από το συρραπτικό. Που πρέπει να εγκατασταθούν οι βραχίονες υποδεικνύεται με ένα λευκό βέλος. Οι σφιγκτήρες μπορούν να συσφίγγονται με πένσες.


Βήμα πέντε Τοποθετήστε και συνδέστε τον κινητήρα
Για να μπορέσει το ρομπότ να κινηθεί ευθεία, ο άξονάς του πρέπει να είναι υπό κάποια γωνία προς την επιφάνεια. Με άλλα λόγια, το ρομπότ θα σταθεί στα πλευρικά μέρη και ο άξονάς του θα είναι μόνο σε επαφή με την επιφάνεια. Προκειμένου ο άξονας των ρομπότ να έχει καλή πρόσφυση, πρέπει να τοποθετήσετε μια ελαστική ταινία επάνω του, μπορεί να είναι ένα καμπυλωτό ή ένα ελαστικό στοιχείο συγκράτησης από ένα στυλό ηλίου.
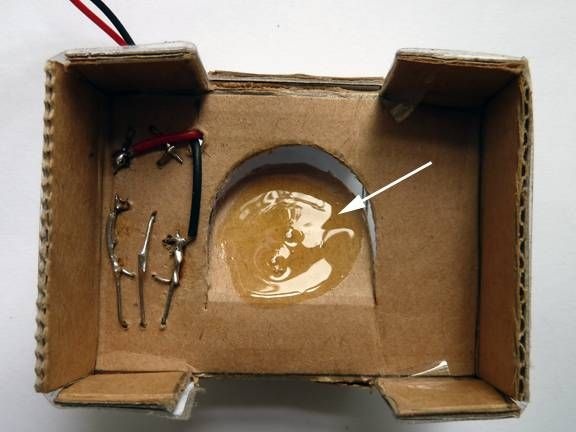
Ο κινητήρας τοποθετείται σε κόλλα, ο τόπος λίπανσης σημειώνεται με ένα λευκό βέλος. Αφού εφαρμόσετε την κόλλα, πρέπει να περιμένετε λίγο ώστε να γίνει παχύρευστο, διαφορετικά μπορεί να εισχωρήσει υγρή κόλλα στον κινητήρα και να καταστραφεί.
Για πρόσθετη στερέωση, ο κινητήρας τυλίγεται με ταινία.


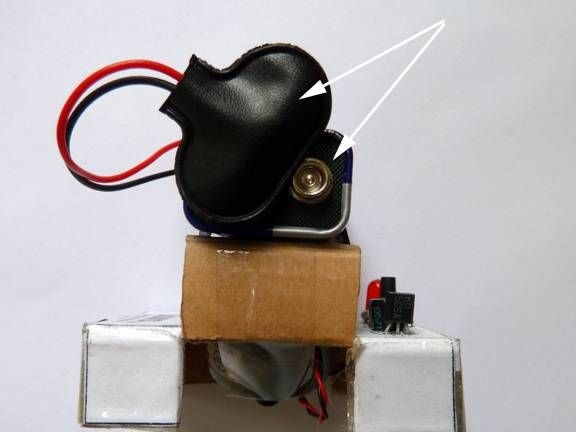
Όσο για τη γωνία του ρομπότ, τότε όλα αυτά είναι σαφώς ορατά στις εικόνες. Μετά την εγκατάσταση, ο κινητήρας πρέπει να συνδεθεί. Ένας ακροδέκτης συνδέεται με το πλην, και ο άλλος με την αποστράγγιση του τρανζίστορ VT1.


Βήμα έξι Το τελικό στάδιο της συναρμολόγησης
Η μπαταρία είναι τοποθετημένη σε πλαίσιο σχήματος U, η μπαταρία στερεώνεται με ηλεκτρική ταινία. Το πλαίσιο σκέφτεται με τέτοιο τρόπο ώστε, εκτός από το στήριγμα, να είναι επίσης ένας απορροφητής κραδασμών για την μπαταρία. Εάν το ρομπότ χρειάζεται να αποσυνδεθεί πλήρως από την παροχή ρεύματος, μπορείτε να αποσυνδέσετε ένα καλώδιο από την μπαταρία.
Λοιπόν, τελικά, για το διαγωνισμό θα χρειαστείτε ένα δαχτυλίδι, είναι κατασκευασμένο σε δύο στρώσεις, με πάχος τουλάχιστον 3 mm. Εάν δεν πληρούται αυτή η προϋπόθεση, το ρομπότ δεν θα μπορεί να σταματήσει στην άκρη του δακτυλίου. Η διάμετρος του δακτυλίου πρέπει να είναι 250 mm. Το κάτω στρώμα αποτελείται από ένα λεπτό κυματοειδές χαρτόνι και το ανώτερο από λεπτό χαρτόνι. Και τα δύο στρώματα πρέπει να κολληθούν μαζί. Το συνέδριο τελείωσε, μπορείτε να ξεκινήσετε τον διαγωνισμό. Ο νικητής είναι το ρομπότ που παραμένει στο δαχτυλίδι.