

Το άρθρο θα εξετάσει ένα παράδειγμα δημιουργίας ενός θρυλικού ρομπότ που ονομάζεται "Canbot". Το μεγαλύτερο μέρος των λεπτομερειών για το ρομπότ εκτυπώνεται σε έναν τρισδιάστατο εκτυπωτή. Το ρομπότ ελέγχεται εξ αποστάσεως.
Υλικά και εργαλεία για σπιτικό:
- Ένας μικροελεγκτής Atmel Attiny85.
- δύο μικροεπιχειρήσεις HXT900 ή τα ανάλογα τους.
- μία μπαταρία LiPo 3.7V.
- ένας υπέρυθρος δέκτης στα 38kHz.
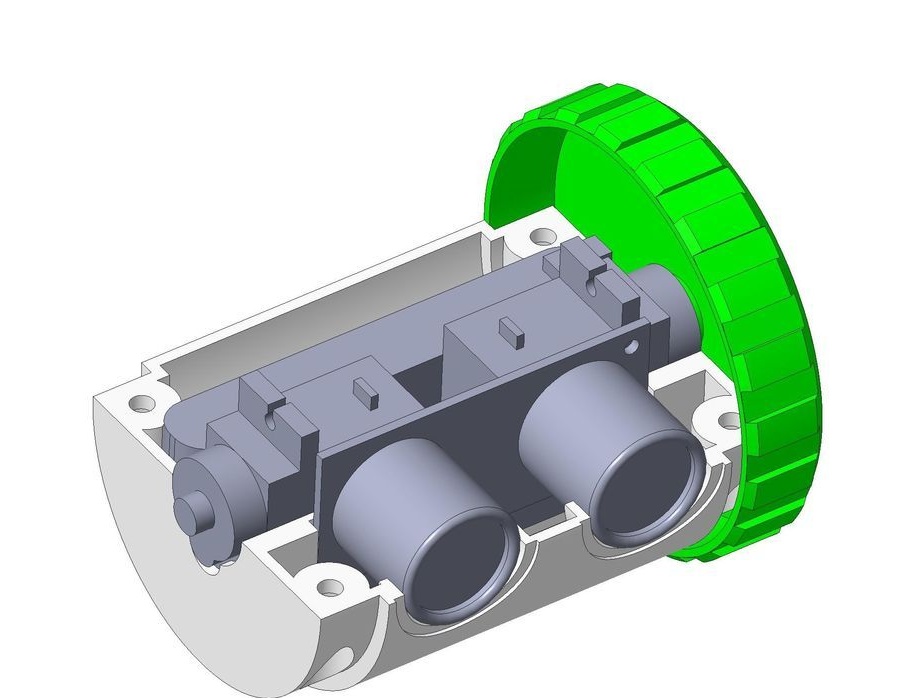
- υπερηχητικός μορφοτροπέας τύπου HC-SR04 ·
- Διακόπτης 9x4mm ή jumper αντί.
- 3D τμήματα (πιθανά). Θα χρειαστεί μία κορυφή (top.stl), μία βάση (bottom.stl) και δύο τροχούς (wheel.stl).
Φυσικά, θα χρειαστούν εργαλεία συγκόλλησης, καυτή κόλλα, κατσαβίδια, βίδες, σύρματα και άλλα μικρά πράγματα.

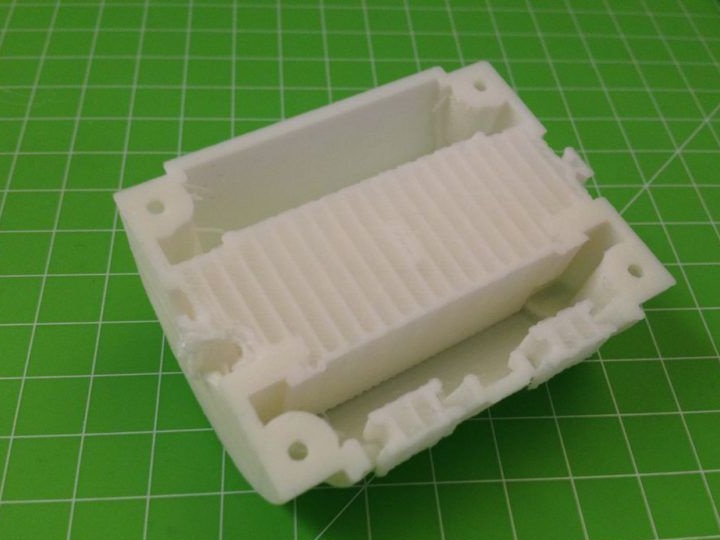
Το άνω και το κάτω μέρος θα πρέπει να εκτυπωθούν επίπεδη προς τα κάτω χρησιμοποιώντας την επιλογή "δομές στήριξης". Ανάλογα με τον τύπο του εκτυπωτή που χρησιμοποιείται, τελικά εξαρτήματα ενδέχεται να χρειαστεί να καθαριστούν στο τέλος.
Η διαδικασία κατασκευής του ρομπότ:
Πρώτο βήμα. Ηλεκτρονικά μέρος του ρομπότ
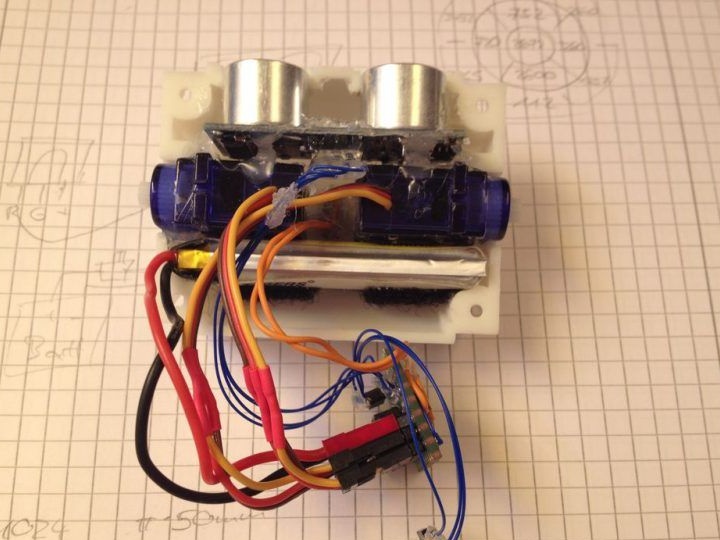
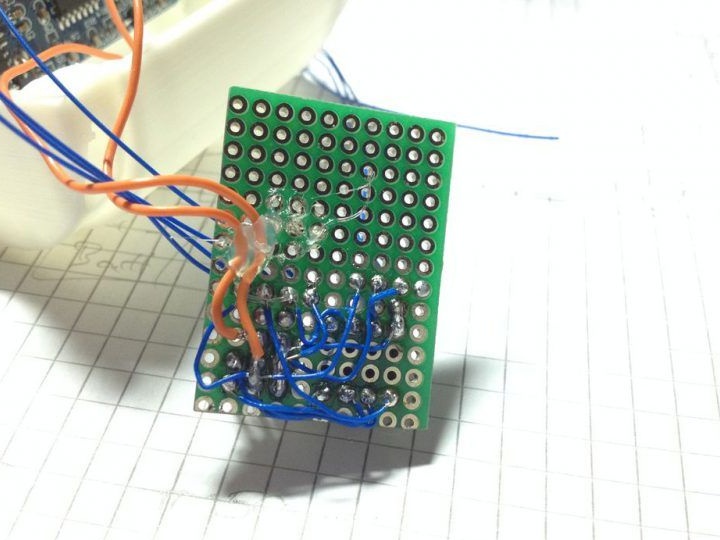
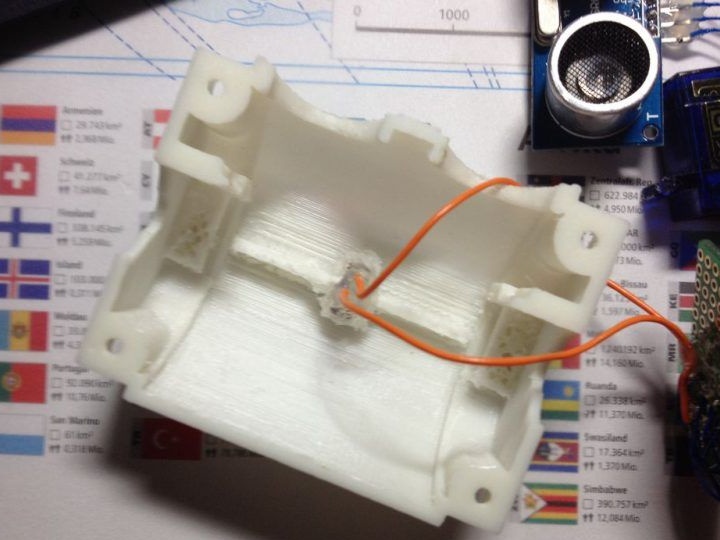
Πρώτα πρέπει να ρυθμίσετε τις σερβομηχανές, πρέπει να μετατραπούν σε συνεχή περιστροφή. Πώς να το κάνετε αυτό, υπάρχουν τόνοι οδηγιών στο Διαδίκτυο. Λοιπόν, όλα τα ηλεκτρονικά στοιχεία θα πρέπει να συναρμολογηθούν όπως υποδεικνύεται στο διάγραμμα. Για να συναρμολογήσετε το ηλεκτρονικό μέρος ήταν βολικό, μπορείτε να πάρετε ένα μικρό κομμάτι ένα breadboard, καθώς και λεπτά σύρματα.


Βήμα δεύτερο Το λογισμικό μέρος του ρομπότ
Αν πλησιάσετε τη διαδικασία δημιουργίας ενός ρομπότ με τον υψηλότερο επαγγελματισμό, τότε το τμήμα λογισμικού μπορεί να γραφτεί ανεξάρτητα. Αλλά γι 'αυτό θα πρέπει να μάθετε μια γλώσσα προγραμματισμού. Σε μια απλούστερη έκδοση, μπορείτε να κατεβάσετε έτοιμο κώδικα και απλά να το ανεβάσετε στον μικροελεγκτή.
Σύμφωνα με τον συγγραφέα, το καλύτερο το ρομπότ λαμβάνει υπέρυθρα σήματα από τηλεχειριστήρια της μάρκας Sony. Στο μέλλον, θα χρειαστεί να "ξεπεράσουμε" το τμήμα του κώδικα Arduino και να εξάγει τα δεδομένα μέσω της λειτουργίας Serial.print (). Ως αποτέλεσμα, θα είναι δυνατό να διαπιστωθεί ποια είναι η κωδικοποίηση σε κάθε κουμπί.
Βήμα τρίτο Το τελικό στάδιο. Συναρμολογήστε το ρομπότ
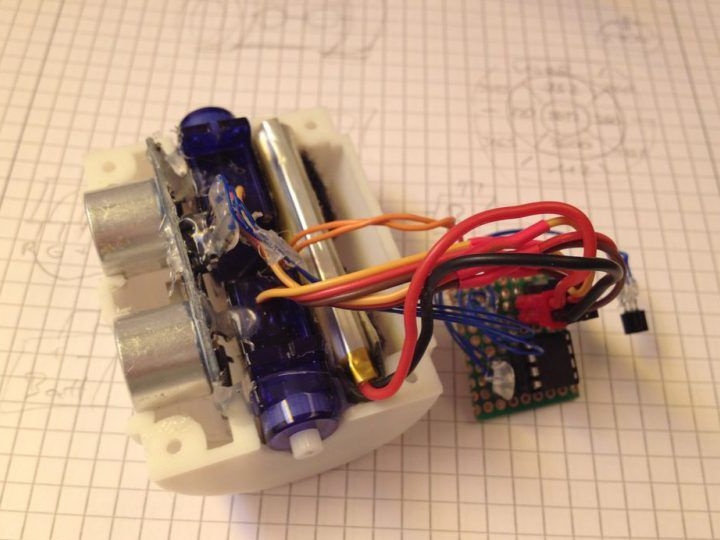
Λοιπόν, τελικά, το ρομπότ πηγαίνει. Για τους σκοπούς αυτούς, θα χρειαστείτε θερμή κόλλα. Με αυτό, πρέπει να διορθώσετε τα καλώδια έτσι ώστε να μην σβήνουν όταν το ρομπότ κινείται.Είναι επίσης απαραίτητο να στερεώσετε το διακόπτη και να στερεώσετε καλά τον αισθητήρα υπερήχων. Εν κατακλείδι, τα καλύμματα του ρομπότ συνδέονται χρησιμοποιώντας τέσσερις βίδες, ως αποτέλεσμα, αν είναι απαραίτητο, μπορεί να αποσυναρμολογηθεί εύκολα. Παρεμπιπτόντως, οι βίδες για σερβομηχανισμούς είναι ιδανικές για τοποθέτηση.

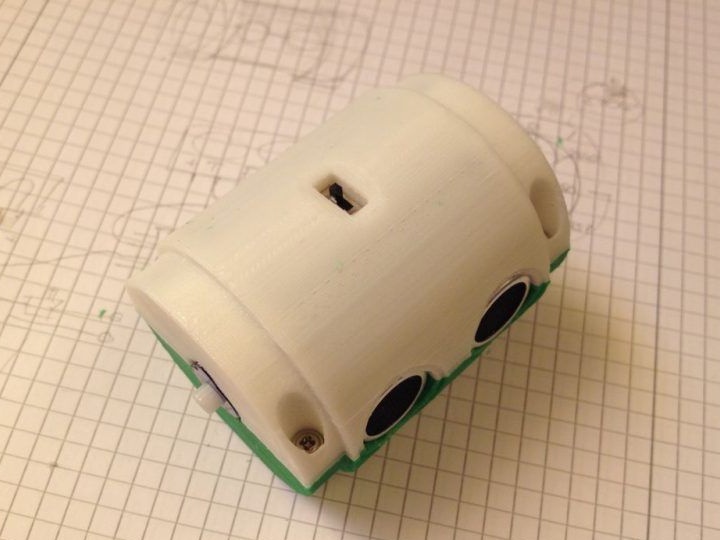
Αυτό είναι όλο, τώρα το ρομπότ είναι σχεδόν έτοιμο. Παραμένει η εγκατάσταση των τροχών στους άξονες του σερβοκινητήρα και μπορείτε να ξεκινήσετε τη δοκιμή του ρομπότ. Μπορείτε να δείτε με περισσότερες λεπτομέρειες πώς σπιτική εργασία στο βίντεο.