


Έλαβα μέρος του σχεδιασμού μου από τις οδηγίες συναρμολόγησης Lego Technic 42049. Το υπόλοιπο είναι ο αυτοσχεδιασμός μου. Για τη διαχείριση, θα χρησιμοποιήσω μια μονάδα Bluetooth συνδεδεμένη σε μια συσκευή Android ή έναν υπολογιστή.
Έτσι χρειαζόμαστε:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- 2 οδηγούς κινητήρα L9110S
- 1 μονάδα σερβομηχανισμού SG-90
- Μονάδα Bluetooth HC-05 ή ισοδύναμο
- USB-UART για firmware του arduino
- Μίνι κιβώτιο ταχυτήτων 50 rpm
- Μίνι κιβώτιο ταχυτήτων 100 σ.α.λ.
- κιβώτιο ταχυτήτων κινητήρα 6v 150 rpm
- 2 λυχνίες LED
- 2 αντιστάσεις 150 ohm
- Πυκνωτής 10v 1000uF
- 2 χτένες μονής σειράς PLS-40
- Επαγωγέας 68mkGn
- 6 μπαταρίες NI-Mn 1.2v 1000mA
- Συνδέστε τον μπαμπά-μαμά με δύο πείρους στο καλώδιο
- Homutik
- Σύρματα διαφορετικών χρωμάτων
- συγκόλληση
- Ρόζιν
- συγκολλητικό σίδερο
- Βίδες 3x20, παξιμάδια και ροδέλες για αυτά
- Βίδες 3x40
- Βίδες 3x60
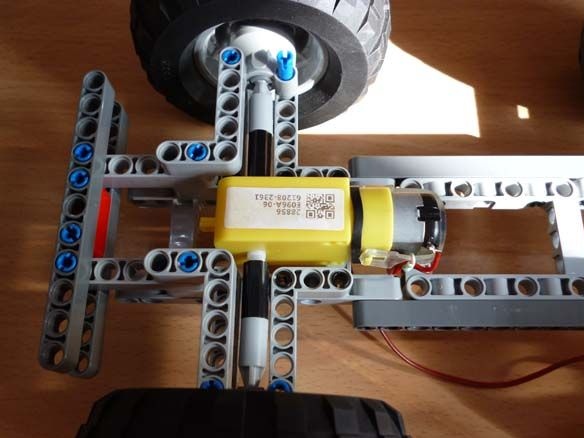
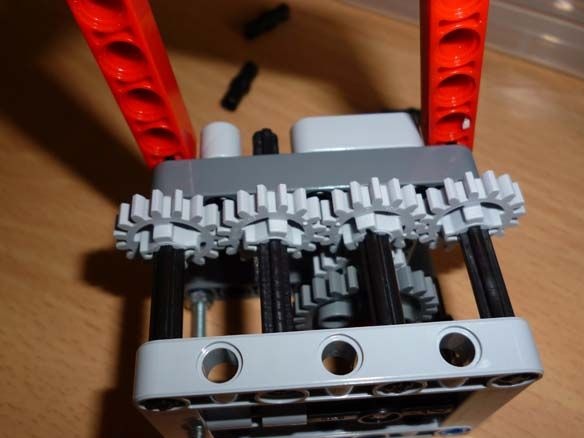
Βήμα 1 Συγκρότημα οπίσθιου άξονα
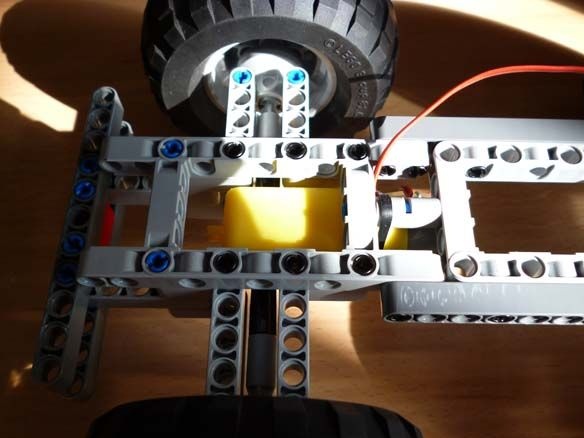
Για κίνηση, θα χρησιμοποιήσουμε έναν κινητήρα μετάδοσης κίνησης με κινητήρα 6 volt με ταχύτητα 150 σ.α.λ. Ο άξονας του κιβωτίου ταχυτήτων πρέπει να κόβεται και από τις δύο πλευρές και να τοποθετείται στα τμήματα του μοχλού. Ο οπίσθιος άξονας συναρμολογείται ως εξής:
Και από την άλλη πλευρά:
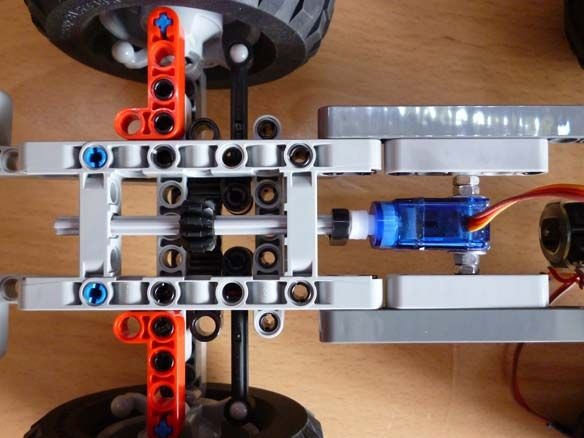
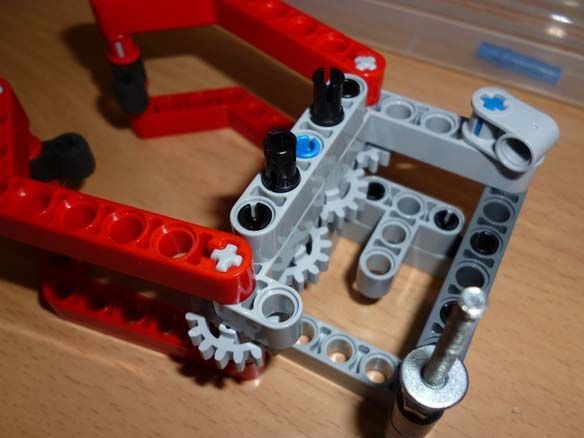
Βήμα 2 Συναρμολόγηση του μπροστινού άξονα
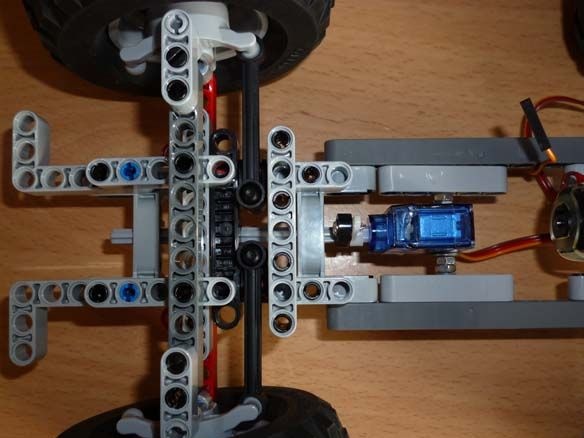
Για την περιστροφή των τροχών, ο σέρβο SG-90 είναι κατάλληλος. Για να το στερεώσετε στο μοντέλο μας, είναι απαραίτητο να τρυπήσετε προσεκτικά, ώστε να μην αγγίξετε τα εσωτερικά μέρη του σερβο, μια διαμπερή οπή με διάμετρο 3,2 mm ή απλά να το κόψετε με ένα μαχαίρι χαρτικής. Επίσης κόψτε τα προεξέχοντα μέρη ("φτερά" για στερέωση). Εισαγάγουμε ένα μπουλόνι στην τρύπα και στερεώστε το με παξιμάδια. Στον άξονα του σερβομηχανισμού βάζουμε ένα μοχλό με ένα βιδωτό τμήμα από το lego:

Και από την άλλη πλευρά:
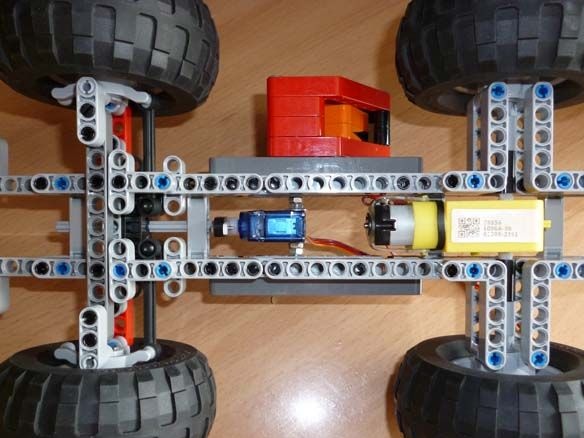
Βήμα 3 Συναρμολόγηση βάσης και καμπίνας
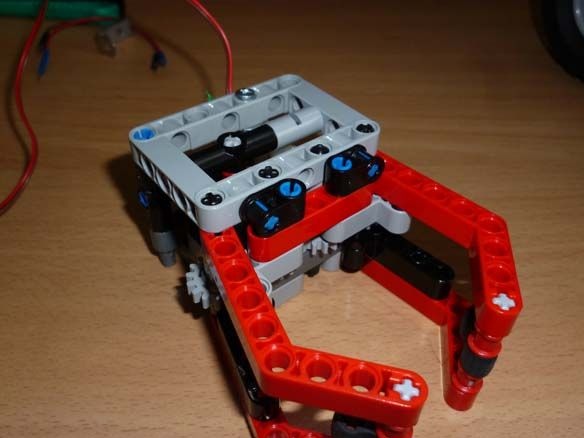
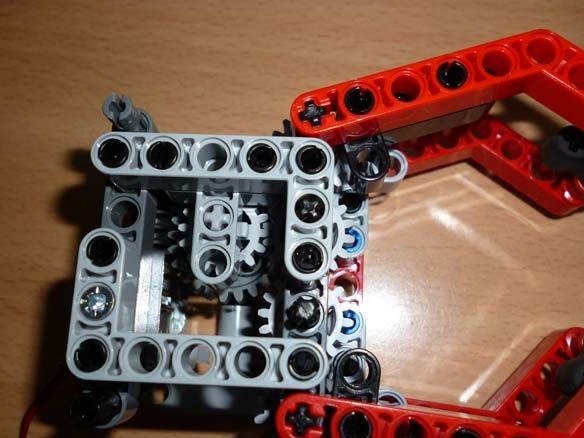
Συνδέουμε και τις δύο γέφυρες όπως φαίνεται στη φωτογραφία:

Συγκεντρώνουμε την καμπίνα (που απαιτείται για την ομορφιά):
Βάλαμε την καμπίνα με βάση:

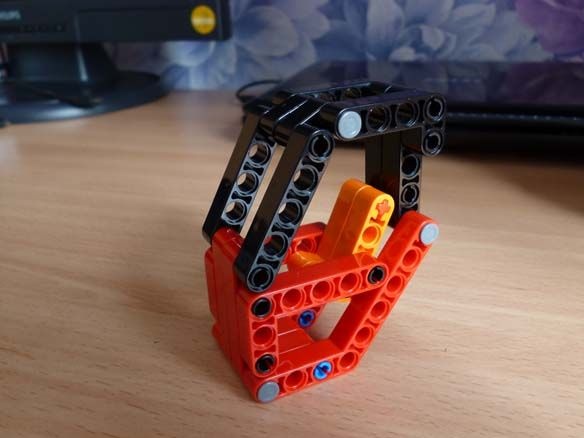
Βήμα 4 Κάνοντας ένα καπάκι ή ένα νύχι
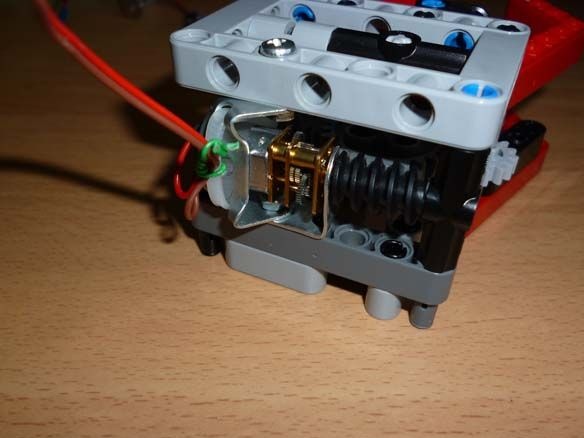
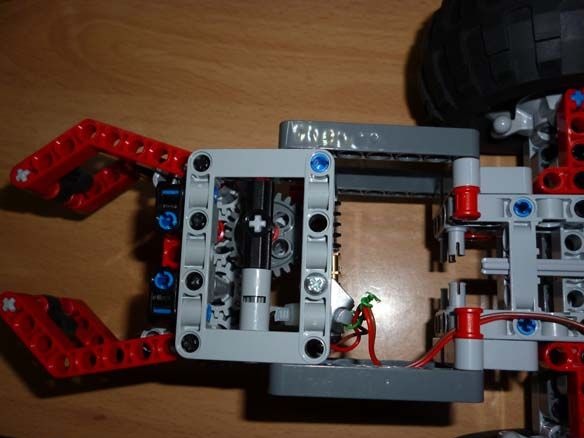
Το νύχι οδηγείται από ένα κιβώτιο ταχυτήτων με μίνι κινητήρα με ταχύτητα 50 σ.α.λ. Έχω λύσει το πρόβλημα της σύνδεσης του κινητήρα των ταχυτήτων με τα μέρη του σχεδιαστή ως εξής: Έβαλα ένα συνδετικό χιτώνιο στον άξονα κινητήρα του γραναζιού και εισήγαγε ένα θραύσμα ενός αγώνα για τη στερέωση. Για τοποθέτηση, ο κινητήρας μετάδοσης χρησιμοποίησε μεταλλικό πλαστικό από σχεδιαστή σιδήρου και σφιγκτήρα. Αποδείχθηκε τα εξής:

Στη συνέχεια, συλλέγουμε το ίδιο το νύχι από τη φωτογραφία:

Το διορθώνουμε στη βάση:

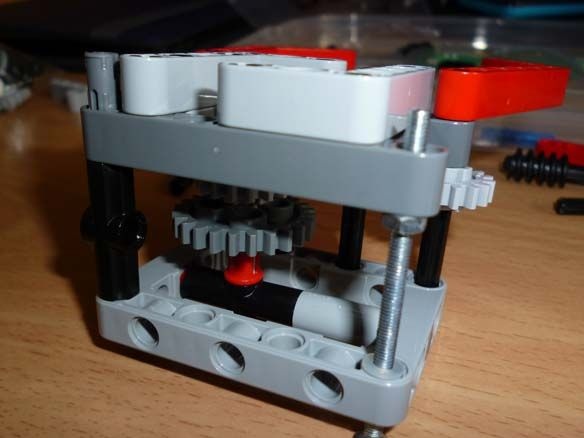
Ένα μικρό κιβώτιο ταχυτήτων με ταχύτητα 100 σ.α.λ. είναι κατάλληλο για την ανύψωση ενός νύχι:


Βήμα 5 Ηλεκτρολόγος
Για έλεγχο, θα χρησιμοποιήσουμε το Arduino Pro Mini και τη μονάδα Bluetooth. Για τη σύνδεση των κινητήρων χρειάζονται μηχανισμοί οδήγησης.
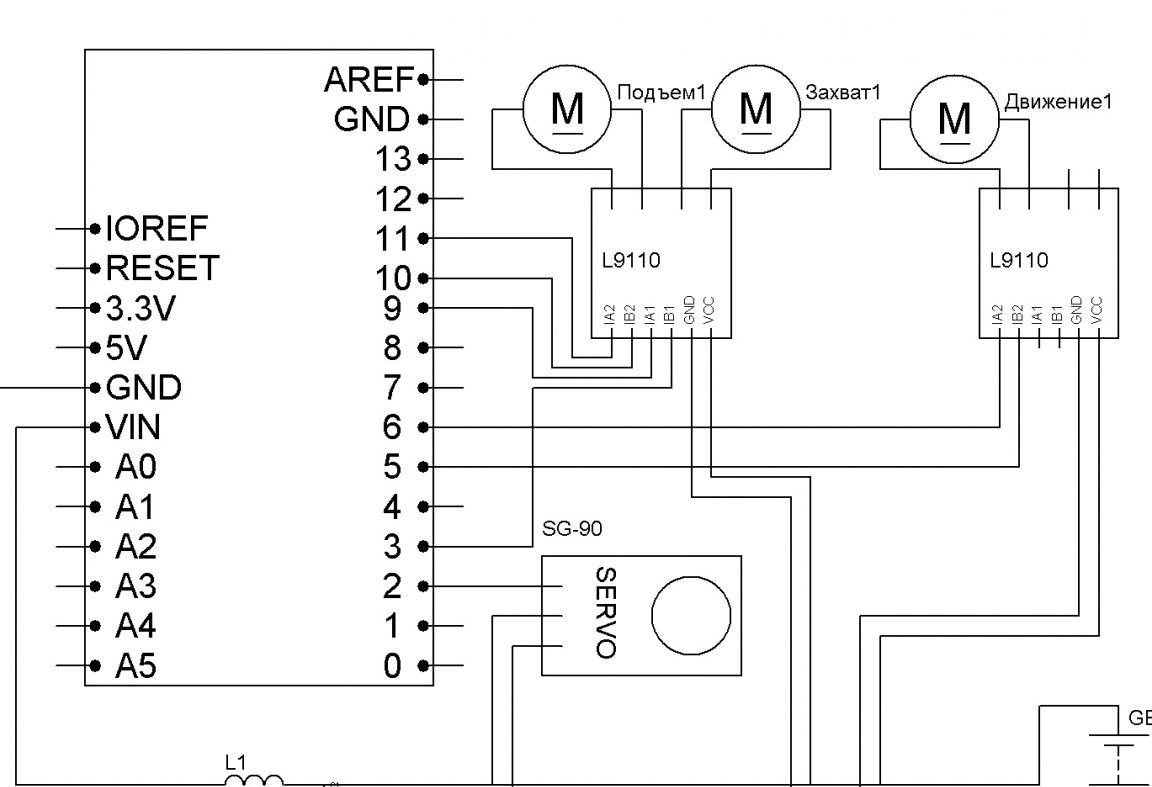
Σύνδεση όλων των εξαρτημάτων με τα καλώδια Dupont από μητέρα προς μητέρα.Ισχύς - 6 μπαταρίες NI-Mn 1.2v 1000mA συνδεδεμένες σε σειρά. Ένας πυκνωτής οποιασδήποτε χαμηλής ισχύος, ένας επαγωγέας επίσης θα βρείτε, θα πρέπει να σταθεροποιήσετε τη δύναμη του μικροελεγκτή. Οι ανόδους των δύο LED είναι συνδεδεμένες σε 4 pin arduino, οι κάθοδοι στο GND. Για τις χρησιμοποιούμενες λυχνίες LED επιλέγονται αντιστάσεις. Για ευκολία, βγάλτε τις μπαταρίες με ταινία.

Τα κόβουμε όλα σε μια ταινία διπλής όψεως με βάση:

Βήμα 6 Ρύθμιση Bluetooth
Τα πιο προσιτά στοιχεία Bluetooth σήμερα είναι τα HC-05 και HC-06. Είναι άφθονα στα κινεζικά ηλεκτρονικά καταστήματα. Οι διαφορές μεταξύ τους είναι ότι ο πρώτος μπορεί να λειτουργήσει τόσο σε master mode (slave) όσο και σε λειτουργία slave (master). Το δεύτερο είναι μια καθαρά σκλάβος συσκευή. Με άλλα λόγια, το HC-06 δεν μπορεί να εντοπίσει μια ζευγαρωμένη συσκευή και να δημιουργήσει μια σύνδεση με αυτό, μπορεί μόνο να υπακούει στον κύριο.
Σύντομα χαρακτηριστικά των ενοτήτων:
- τσιπ Bluetooth - BC417143 κατασκευασμένο από
- πρωτόκολλο επικοινωνίας - προδιαγραφή Bluetooth v2.0 + EDR;
- ακτίνα δράσης - έως 10 μέτρα (επίπεδο ισχύος 2).
- Συμβατό με όλους τους προσαρμογείς Bluetooth που υποστηρίζουν το SPP.
- Η ποσότητα της μνήμης flash (για την αποθήκευση του υλικολογισμικού και των ρυθμίσεων) - 8 Mbit.
- τη συχνότητα του ραδιοφωνικού σήματος - 2,40 ... 2,48 GHz,
- διεπαφή κεντρικού υπολογιστή - USB 1.1 / 2.0 ή UART.
- κατανάλωση ενέργειας - το ρεύμα κατά τη διάρκεια της επικοινωνίας είναι 30-40 mA. Η μέση τιμή ρεύματος είναι περίπου 25 mA. Μετά την εγκατάσταση, η κατανάλωση ρεύματος είναι 8 mA.
Συνήθως, οι ενότητες πωλούνται ως δύο συγκολλημένες σανίδες. Το μικρότερο είναι μια εργοστασιακή μονάδα, που χρησιμοποιείται ευρέως σε διάφορα ηλεκτρονικό συσκευές. Μεγάλο - ένα ειδικό breadboard για DIY. Μοιάζει με μικρότερο πίνακα με τσιπ BC417:

Και έτσι τα DIY modules HC-05 και HC-06 τα ίδια:
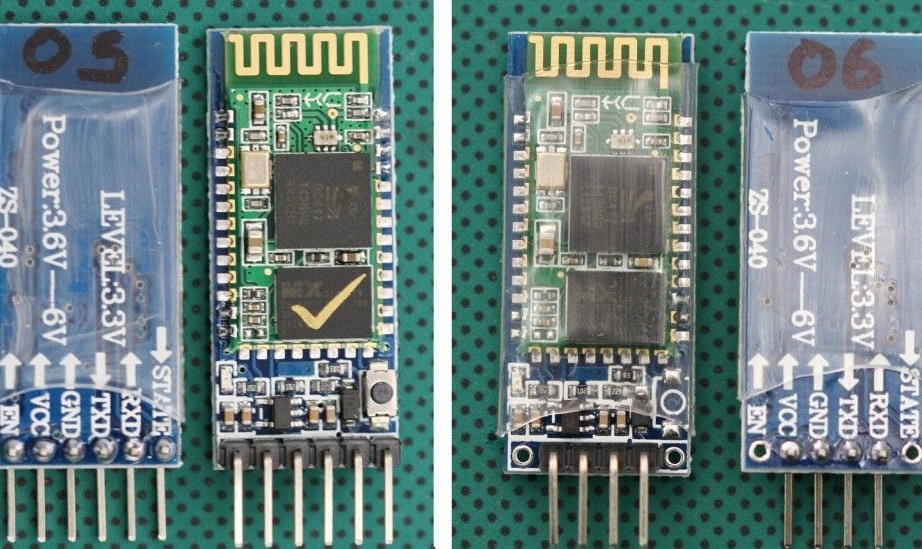
Κατ 'αρχήν, μπορείτε να χρησιμοποιήσετε οποιαδήποτε μονάδα που σας αρέσει. Μια μονάδα χωρίς πριτσίνια κοστίζει λιγότερο, αλλά στη συνέχεια θα πρέπει να φροντίσετε την τροφοδοσία ισχύος 3,3 V της μονάδας και να θρηνήσετε με τη συγκόλληση καλωδίων στη μονάδα. Επέλεξα το βέλτιστο, κατά τη γνώμη μου, στη σχέση τιμής / λειτουργίας HC-06.
Συνδέουμε ως εξής:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND -GND
Για σωστή λειτουργία, η μονάδα πρέπει να ρυθμιστεί. Θα διαμορφώσουμε εντολές AT που εισάγονται στο παράθυρο του τερματικού. Δίνω ένα παράδειγμα εγκατάστασης της μονάδας HC-05. Εάν έχετε μια διαφορετική ρύθμιση μπορεί να είναι διαφορετική. Προκειμένου η μονάδα μας να λαμβάνει εντολές, πρώτα αναβοσβήνουμε το Arduino με το ακόλουθο firmware:
Στην περίπτωση αυτή, ο Arduino λειτουργεί ως γέφυρα μεταξύ υπολογιστών και μονάδας. Στο υλικολογισμικό, χρησιμοποιώ τη βιβλιοθήκη λογισμικού. Σε υψηλές ταχύτητες, λειτουργεί ασταθής. Αν θέλετε υψηλή ταχύτητα, μπορείτε να συνδέσετε την μονάδα απευθείας στις επαφές Arduino RX και TX και να ξαναγράψετε το υλικολογισμικό. Αλλά στην περίπτωσή μου, θα εργαστούμε με την ενότητα με ταχύτητα 9600. Έτσι μετά το firmware, ανοίξτε το τερματικό και εισάγετε:
"AT" (χωρίς εισαγωγικά) η απάντηση "OK" πρέπει να έρθει (σημαίνει ότι όλα είναι συνδεδεμένα σωστά και η μονάδα λειτουργεί)
"AT + BAUD96000" (χωρίς τα αποσπάσματα) πρέπει να έρθει η απάντηση "OK9600".
Αν έχετε τη σωστή απάντηση, μεταβείτε στο επόμενο βήμα.
Βήμα 7 Firmware
Για να γράψω το υλικολογισμικό και το ίδιο το υλικολογισμικό, χρησιμοποιώ το IDE του Arduino. Η τρέχουσα έκδοση για σήμερα είναι 1,8. Πραγματικά υλικολογισμικό:
Βήμα 8 Ρύθμιση του τηλεφώνου σας.
Σε ένα τηλέφωνο Android, θα πρέπει να εγκαταστήσετε ένα πρόγραμμα ελέγχου του ρομπότ μέσω Bluetooth. Υπάρχουν πολλά από αυτά. Μπορείτε να εισάγετε το "Bluetooth Arduino" στο Google Play και να επιλέξετε το γούστο σας. Μου άρεσε ο ελεγκτής BT. Λήψη και εγκατάσταση στο τηλέφωνο ή το tablet Android. Στη συνέχεια, μέσω των ρυθμίσεων Android, πρέπει να δημιουργήσετε μια σύνδεση με την ενότητα μας. Ο κωδικός πρόσβασης για τη σύνδεση είναι "1234" ή "0000". Στη συνέχεια, διαμορφώστε το πρόγραμμα για τις κατάλληλες εντολές. Ο κατάλογος είναι παρακάτω.
Βήμα 9 Ρύθμιση υπολογιστή (εάν είναι απαραίτητο)
Εάν είναι απαραίτητο, ή απλά ευκολία για έλεγχο, μπορείτε να χρησιμοποιήσετε έναν υπολογιστή ή ένα φορητό υπολογιστή. Για να γίνει αυτό, ο υπολογιστής πρέπει να έχει Bluetooth. Δημιουργούμε επικοινωνία με την ενότητα μας μέσω των χειριστηρίων στον υπολογιστή. Στη συνέχεια, χρειαζόμαστε ένα τερματικό για την αποστολή εντολών. Οποιοδήποτε κατάλληλο για εσάς. Αφού καταγράψετε το υλικολογισμικό, ο έλεγχος πραγματοποιείται με τα ακόλουθα κουμπιά (εντολές):
W - προς τα εμπρός
S - πίσω
Α - αριστερά
D - δεξιά
F - στάση
G - τιμόνι
K - προβολείς
L - προβολέας σβηστή
R - ανασηκώστε
E - κατηφόρα
Q-στάση ανελκυστήρα
T - σύλληψη
Y - Απελευθέρωση
H - Σταματήστε τη νύχτα
Η συνεχής εισαγωγή εντολών είναι ακατάλληλη, γι 'αυτό συνιστούμε να χρησιμοποιείτε το πρόγραμμα για την αποστολή εντολών. Χρησιμοποιώ τον Z-Controller.Στο πρόγραμμα, επιλέξτε τη θύρα (θύρα com μέσω της οποίας πραγματοποιείται η σύνδεση) και ρυθμίστε τα κλειδιά για τις εντολές. Ρυθμίστε αδρανής και διαισθητική.
