


Καλησπέρα, σήμερα θέλω να μοιραστώ οδηγίες για να φτιάξω μια δεξαμενή. Θα υπάρχουν δύο επιλογές για τον εσωτερικό ελεγκτή: ESP -8266 και Arduino Pro Mini. Στην πρώτη έκδοση, ο έλεγχος πραγματοποιείται μέσω Wi-Fi επικοινωνιών. Στο δεύτερο - τηλεχειριστήριο IR. Είναι κατασκευασμένο με βάση το TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35), κινούνται από ένα Tamiya 70097 Twin-Motor Gearbox Kit και τους κινητήρες που συνοδεύουν το κιβώτιο ταχυτήτων.
Θα χρειαστούμε:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- κόλλα μοντέλου (για παράδειγμα το τσιμέντο TAMIYA)
- κιβώτιο ταχυτήτων Tamiya 70097 με δύο μοτέρ
- ESP 8266 -12E ή Arduino Pro Mini 8MHz 3.3V
- σταθεροποιητής τάσης AMS 1117 3.3v 8000mA (αν υπάρχει επιλογή με ESP 8266-12E)
- οδηγός κινητήρα Qifei L9110
- πυκνωτής 10v 1000uF
- δύο χρωμάτων (κόκκινο, πράσινο) LED
- μπλε LED
- 2 κόκκινα LED
- Δέκτης IR
- φωτοαντιστάσεων
- 2 διαμερίσματα για 2 μπαταρίες AAA ή 4 μπαταρίες AAA 1.2V 1000mA NI-MN
- 2 αντιστάσεις 2ohm
- 4 αντιστάσεις 75 ohms
- 6 αντιστάσεις 10 kOhm (αν υπάρχει επιλογή με ESP 8266-12E)
- κουμπί
- φωτοαντιστάσεων
- USB - TTL
- συγκολλητικό σίδερο
- πολύχρωμα καλώδια
Βήμα 1 Στέγαση και μηχανική.
Πρώτα πρέπει να συλλέξετε το μοντέλο TAMIYA 35162 Schutzenpanzer Marder 1Α2 (1:35). Συνδέουμε το κάτω μέρος σύμφωνα με τις οδηγίες, με εξαίρεση τα εξαρτήματα που καλύπτουν τα ανοίγματα εξόδου των αξόνων του κιβωτίου ταχυτήτων. Οι κορυφαίοι αστέρες δεν κολλάνε. Συνδέστε το επάνω μέρος σύμφωνα με τις οδηγίες χωρίς αλλαγές. Αφού κολληθούν όλα αυτά, αφήστε τα για ξήρανση και προχωρήστε στη συλλογή του κιβωτίου ταχυτήτων. Όπως φαίνεται από τις οδηγίες, το Tamiya 70097 μπορεί να συναρμολογηθεί σε δύο διαφορετικές εκδόσεις.
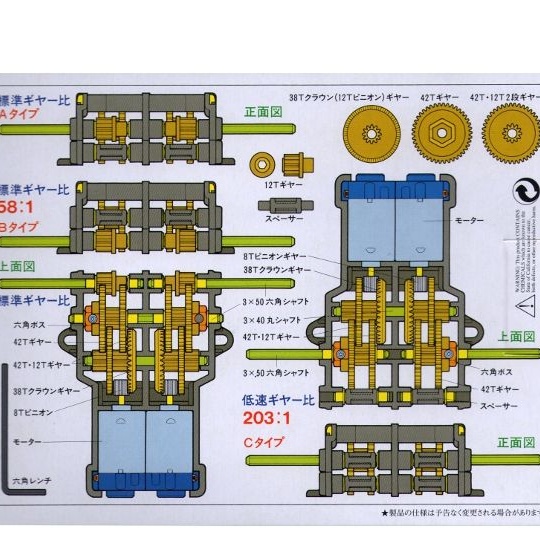
Η πρώτη επιλογή με λόγο μετάδοσης 58: 1, ο δεύτερος - 203: 1. Χρειαζόμαστε την πρώτη επιλογή. Και εδώ, επίσης, δεν είναι τόσο απλό. Σε αυτήν την περίπτωση, η έξοδος του άξονα μπορεί να είναι πιο κοντά στο κάτω μέρος του κιβωτίου ταχυτήτων ή στη μέση. Η εκπνοή των αξόνων πρέπει να γίνεται στη μέση τρύπα! Αφού συναρμολογήσαμε το κιβώτιο ταχυτήτων, προχωρούμε να το εγκαταστήσουμε στο μοντέλο. Θεωρητικά, όλα πρέπει να είναι απλά, διότι τόσο το μοντέλο όσο και το κιβώτιο ταχυτήτων μιας επιχείρησης. Στην πράξη - το κιβώτιο ταχυτήτων έπρεπε να ωθηθεί εκεί. Στην οριζόντια θέση του κιβωτίου ταχυτήτων, οι άξονες των κινητήριων τροχών έσπρωξαν προς τα πάνω, οπότε έπρεπε να κόψουμε μια μεταλλική πλάκα, η οποία κατέστησε δυνατή τη σταθεροποίηση του κιβωτίου ταχυτήτων στην επιθυμητή θέση.

Οι άξονες του κιβωτίου ταχυτήτων πρέπει να κοπούν κατά 3 mm. Στη συνέχεια κολλήστε τους κινητήριους τροχούς πάνω τους.

Στο επάνω μέρος πιο κοντά στην πλάτη, κάνουμε τρύπες για ένα LED δύο χρωμάτων και ένα δέκτη IR.

Πιο κοντά στο μπροστινό μέρος υπάρχει μια τρύπα για ένα μπλε LED που θα χρησιμεύσει ως φακός.

Και μέσα στην καταπακτή - για ένα φωτοαντιστάσεων.

Στην πίσω πλευρά, κόψτε τις κόκκινες λυχνίες LED για φωτισμό.

Σε όλα τα παραπάνω, θα πρέπει να κολλήσετε τα καλώδια. Είναι πιο βολικό να το κάνετε αυτό πριν από την εγκατάσταση.
Βήμα 2 Ηλεκτρολόγος
Εδώ θα σας δώσω μια επιλογή επιλογών για περαιτέρω συναρμολόγηση.
Εάν έχετε επιλέξει ESP 8266. Η ενσωματωμένη μονάδα Wi-Fi διευκολύνει σημαντικά τη διαδικασία ελέγχου και σύνδεσης.Μπορεί να προγραμματιστεί εύκολα στο IDE του Arduino. Είναι καλύτερο να επιλέξετε μια μονάδα με μνήμη 4 Mb. Σε αυτή την περίπτωση, είναι απαραίτητο να συλλέξετε την ελάχιστη πλεξούδα για την εκκίνηση και το αναβόσβημα του ESP-8266. Μόνο ο ακροδέκτης VCC συνδέεται απευθείας με την παροχή ρεύματος, οι υπόλοιποι ακροδέκτες: CH_PD, RESET, GPIO0, GPIO2, πρέπει να έλκονται στην τροφοδοσία (VCC) μέσω μιας αντίστασης. Οι αντιστάσεις 10kOm μπορούν να αντικατασταθούν με άλλους, από 4.7kOm έως 50kOm, εκτός από το GPIO15 - η αξία του πρέπει να είναι μέχρι 10k. Απευθείας, στο μείον (GND) του τροφοδοτικού, συνδέουμε μόνο το GND και τραβάμε το GPIOO μέσω της αντίστασης σε 10kOm, για να βάλουμε τη μονάδα στη λειτουργία λήψης υλικολογισμικού, στο GND. Το κουμπί απαιτείται για την επανεκκίνηση και τη λειτουργία της μονάδας. Υποδοχή USB-TTL - για firmware.
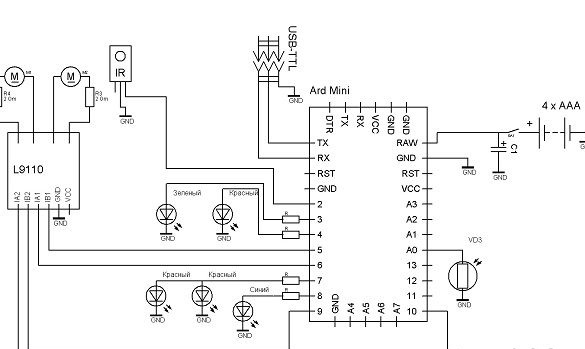
Εδώ είναι ένα διάγραμμα
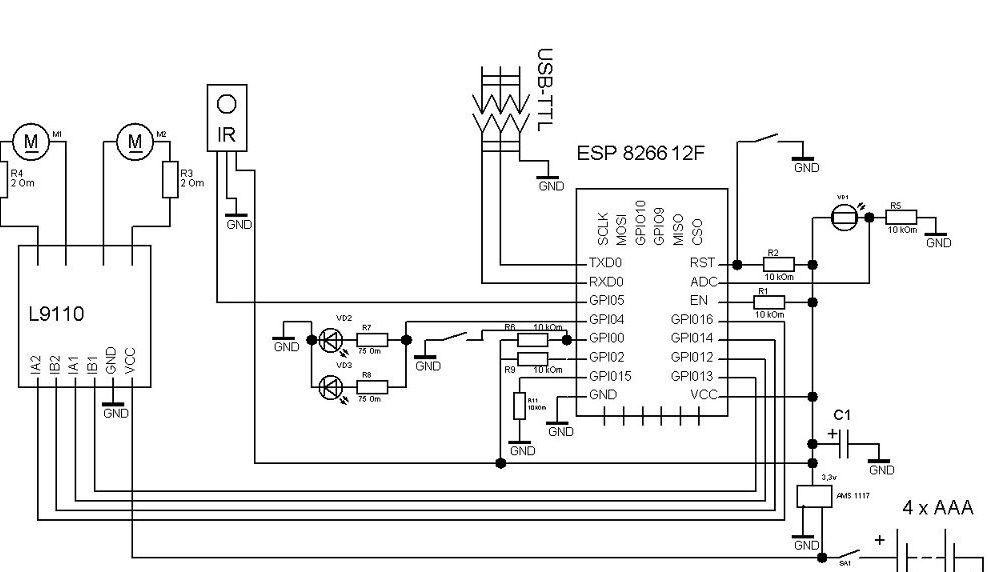
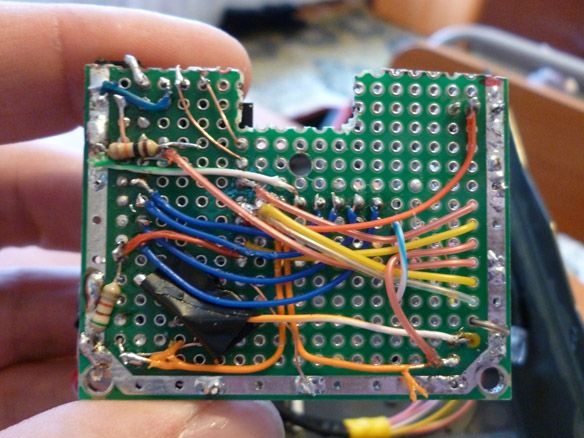
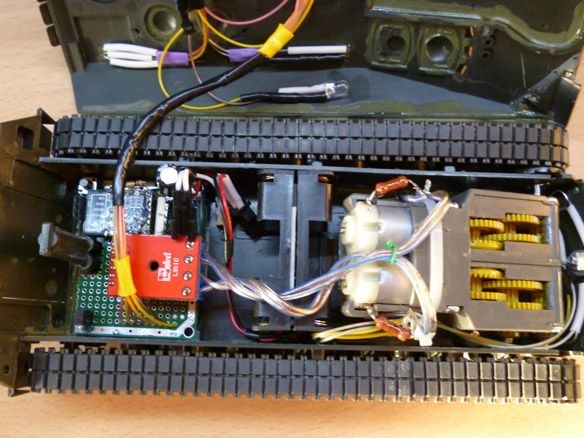
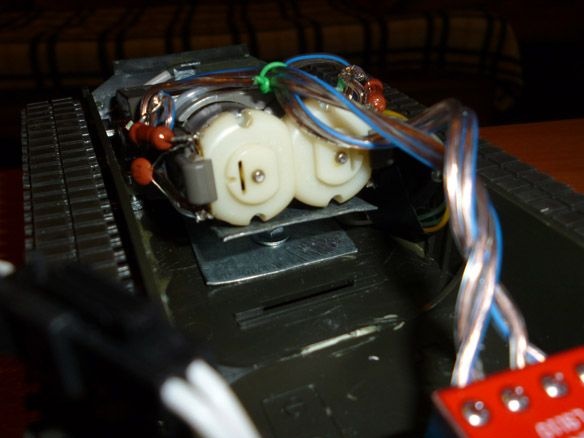
Θα εξηγήσω λίγο, το μπλε και δύο κόκκινα LED είναι απαραίτητα για τον οπίσθιο φωτισμό (είναι ορατό και όμορφο στο σκοτάδι), ο φωτοαντιστάκτης είναι συνδεδεμένος στο ADC του ελεγκτή και χρειάζεται για τον προσδιορισμό του φωτισμού (όταν ο οπίσθιος φωτισμός σβήνει). 10 kOhm αντιστάσεις έλξης, 75 Ohm για LED, 2 Ohm περιορισμό ρεύματος για κινητήρες (χωρίς αυτές, όταν προσπαθούν να κινηθούν, ο ελεγκτής έχει υπερφορτωθεί). Συνδέουμε τα πάντα σύμφωνα με το κύκλωμα στην πλακέτα κυκλώματος. Για τροφοδοσία ρεύματος, μπορείτε να χρησιμοποιήσετε 4 "μικρές" μπαταρίες ή τέσσερις μπαταρίες μεγέθους AAA, συγκολλημένες εν σειρά. Συνδέουμε δύο διαμερίσματα δύο μπαταριών με ταινία διπλής όψης και συνδέουμε σε σειρά. Και τα δύο διαμερίσματα και οι συσσωρευτές μπαταριών τοποθετούνται μεταξύ του κιβωτίου ταχυτήτων και της πλακέτας κυκλώματος.

Αν η επιλογή σας έπεσε στο Arduino. Μόνο το Arduino Pro MINI ταιριάζει μέσα. Αξίζει να επιλέξετε μια κάρτα 3.3 Volt, αφού οι κινητήρες σχεδιάζονται για ισχύ 3 Volt και δεν θέλετε να τροφοδοτείτε ξεχωριστά τους κινητήρες και τον Arduino. Το Arduino είναι ευκολότερο. Ολόκληρη η καλωδίωση του ελεγκτή και ο ρυθμιστής τάσης βρίσκονται ήδη στον ίδιο τον πίνακα. Απομένει να αποσυναρμολογήσετε την πρίζα Arduino και τον οδηγό κινητήρα στην πλακέτα κυκλώματος.

Βήμα 3 Προετοιμασία του περιβάλλοντος προγραμματισμού.
Για να επεξεργαστείτε το firmware και να γεμίσετε το σκίτσο στο ESP, θα πρέπει να εγκαταστήσετε το Arduino IDE από τον επίσημο ιστότοπο του Arduino.cc, καθώς και να εγκαταστήσετε το πρόσθετο για το ESP, μέσω του Διαχειριστή Πίνακα. Για να το κάνετε αυτό, ξεκινήστε το IDE του Arduino και, στη συνέχεια, το αρχείο - Ρυθμίσεις - στο πεδίο Πρόσθετοι πίνακες διευθύνσεων URL, εισάγετε το σύνδεσμο
http://arduino.esp8266.com/package_esp8266com_index.jsonκάντε κλικ στο OK (μπορείτε να εισαγάγετε αρκετούς συνδέσμους χωρισμένους με κόμμα σε αυτό το πεδίο). Επόμενο Εργαλεία - Διοικητικό Συμβούλιο - Διοικητικό Συμβούλιο Διοικητικών Συμβουλίων στο πεδίο φίλτρου, πληκτρολογήστε esp8266 και κάντε κλικ στο ESP8266 από το ESP8266 Community Forum. Κάντε κλικ στην επιλογή Εγκατάσταση και περιμένετε να ολοκληρωθεί η λήψη. Τώρα μένει να επιλέξετε το Table - Generic ESP8266 στο μενού Εργαλεία και να ρυθμίσετε τη συχνότητα της μονάδας σας σε 80 ή 160Mhz, μέγεθος μνήμης flash και να επιλέξετε τη σειριακή θύρα στην οποία είναι συνδεδεμένος ο προσαρμογέας USB-TTL.
Για τον Arduino, απλά εγκαταστήστε το ID Arduino από την επίσημη ιστοσελίδα του Arduino.cc.
Βήμα 4 Firmware
Παραμένει να επεξεργαστείτε το σκίτσο και να το γεμίσετε με ESP.
Στο πεδίο "String _ssid =" ";" ανάμεσα σε εισαγωγικά υποδεικνύουν ποιο σημείο πρόσβασης θέλετε να συνδεθείτε.
"Η συμβολοσειρά _password =" ";" είναι ο κωδικός πρόσβασης για αυτό το δίκτυο.
"Η συμβολοσειρά _ssidAP =" Mardella "," το όνομα του δικτύου που θα αυξήσει το ESP αν δεν συνδεθεί με το υπάρχον.
"String _passwordAP =" 12345678 "," - ο κωδικός πρόσβασης του δικτύου που θα αυξήσει το ESP εάν δεν συνδεθεί με το υπάρχον.
"Σειρά SSDP_Name =" Mardella "," Όνομα SSDP
Μετά την εκκίνηση, το ESP προσπαθεί να συνδεθεί με το σημείο πρόσβασης που καθορίζεται στο σκίτσο, εάν είναι επιτυχημένο, πρέπει να προσδιορίσετε τη διεύθυνση IP του ρομπότ μας και να συνδεθείτε σε αυτήν τη διεύθυνση μέσω ενός προγράμματος περιήγησης. Μπορείτε επίσης να περάσετε από έναν υπολογιστή στην υποδομή δικτύου, να βρείτε τη δεξαμενή εκεί και να κάνετε διπλό κλικ για να συνδεθείτε με αυτήν. Εάν η σύνδεση αποτύχει, το ESP γίνεται το σημείο πρόσβασης. Στη συνέχεια, μπορείτε να αποκτήσετε πρόσβαση συνδέοντας ένα νέο σημείο πρόσβασης και εισάγοντας το 192.168.1.1 στο πρόγραμμα περιήγησης.
Η διεπαφή ιστού αποτελείται από δύο σελίδες. Το πρώτο που ελέγχει. Το δεύτερο είναι για προσαρμογή. Στη δεύτερη σελίδα, μπορείτε να καθορίσετε το σημείο πρόσβασης στο οποίο θέλετε να συνδεθείτε, καθώς και το όνομα της δεξαμενής και το όνομα και τον κωδικό πρόσβασης του σημείου πρόσβασης που αυξάνει το ESP. Όλες οι αλλαγές θα ισχύουν μετά την επανεκκίνηση. Μπορείτε επίσης να επανεκκινήσετε τη μονάδα μέσω της διεπαφής ιστού.
Για το Arduino, πρέπει να επεξεργαστείτε όλα τα πεδία "results.value". Έχοντας καταγράψει τους κωδικούς IR του τηλεχειριστηρίου που πρόκειται να χρησιμοποιήσετε εκεί.

Βίντεο tanchika: